Спосіб енергетичного виявлення і оцінювання параметрів короткого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою
Номер патенту: 91077
Опубліковано: 25.06.2014
Автори: Пічугін Михайло Федорович, Трофименко Юрій Валентинович, Карлов Дмитро Володимирович, Пєвцов Геннадій Володимирович, Кухарський Ігор Андрійович, Яцуценко Анатолій Якович, Борцова Марія Вікторівна
Формула / Реферат
Спосіб енергетичного виявлення і оцінювання параметрів короткого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою точністю, який ґрунтується на перевірці статистичних гіпотез за критерієм мінімуму середнього ризику і використовує енергетичне відношення правдоподібності для виявлення інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення з заданою ймовірністю хибних тривог, і здійснює оцінювання початкової фази і частоти радіосигналу на цьому інтервалі часу при послідовному складанні суміші вхідного радіосигналу і шуму із сукупністю еталонних очікуваних радіосигналів зі змінною початковою фазою і частотою на множині їх можливих значень з різною дискретністю за критерієм максимуму енергетичного відношення правдоподібності, який відрізняється тим, що для оцінювання частоти радіосигналу із заданою можливою точністю на кожній позиції із виявленої вибірки вхідної реалізації формується псевдосигнал заданої тривалості, обмеженої умовою однозначності, та визначається різниця початкових фаз радіосигналів між основним і кутомірними радіоканалами для оцінювання кутового положення цілі, за оцінками якого на кожній позиції та часом затримки радіосигналів відносно однієї з них здійснюється ідентифікація вимірів однієї цілі за часом, визначається дальність до цілі відомими способами (тріангуляційним або різнично-дальномірним) і із системи рівнянь в декартовій системі координат, отриманої на основі властивостей скалярного добутку повного вектора швидкості цілі і виражених його радіальних складових через оцінені частоти на кожній позиції, визначається несуча частота, модуль повного вектора швидкості цілі та його спрямовуючі косинуси у просторі із заданою можливою точністю.
Текст
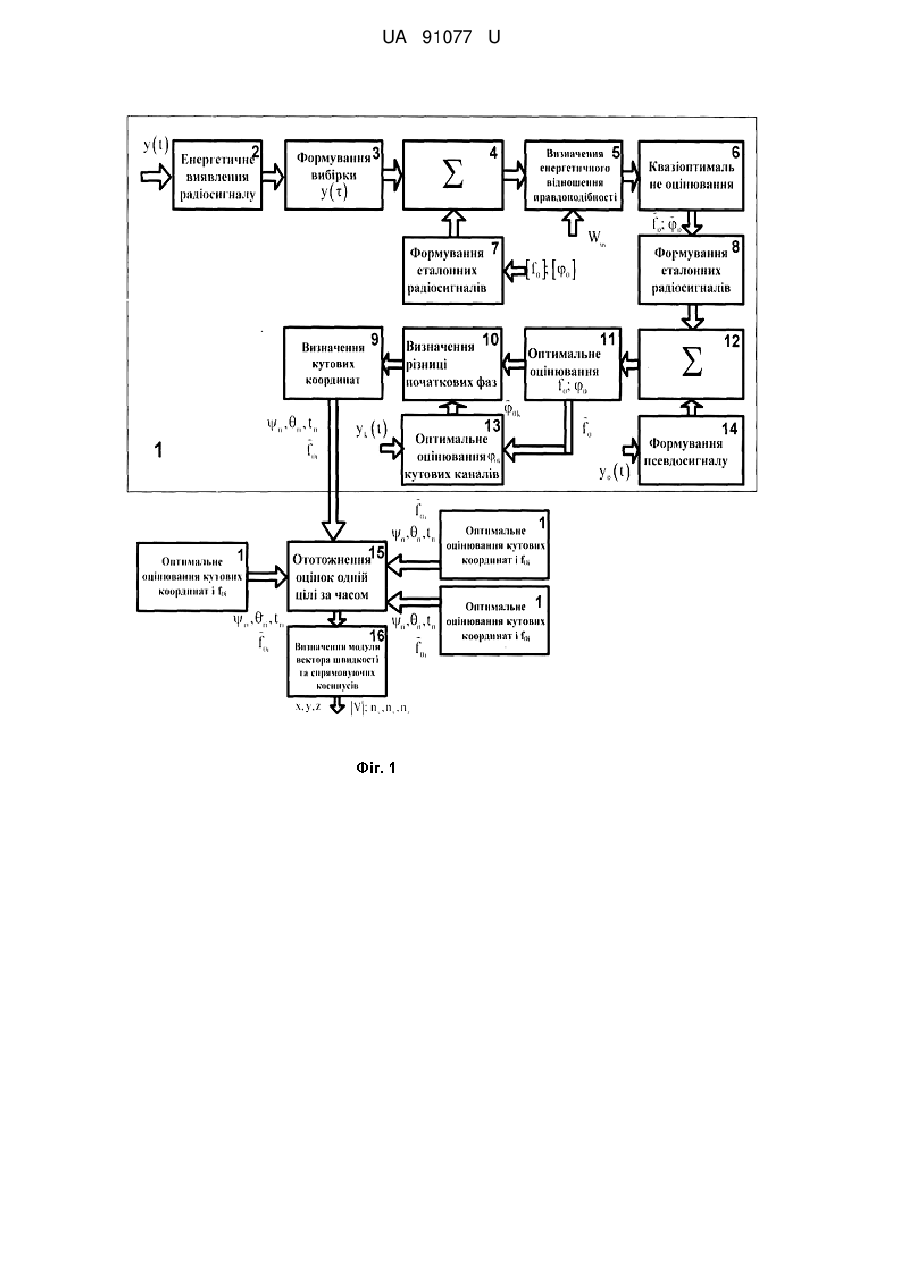
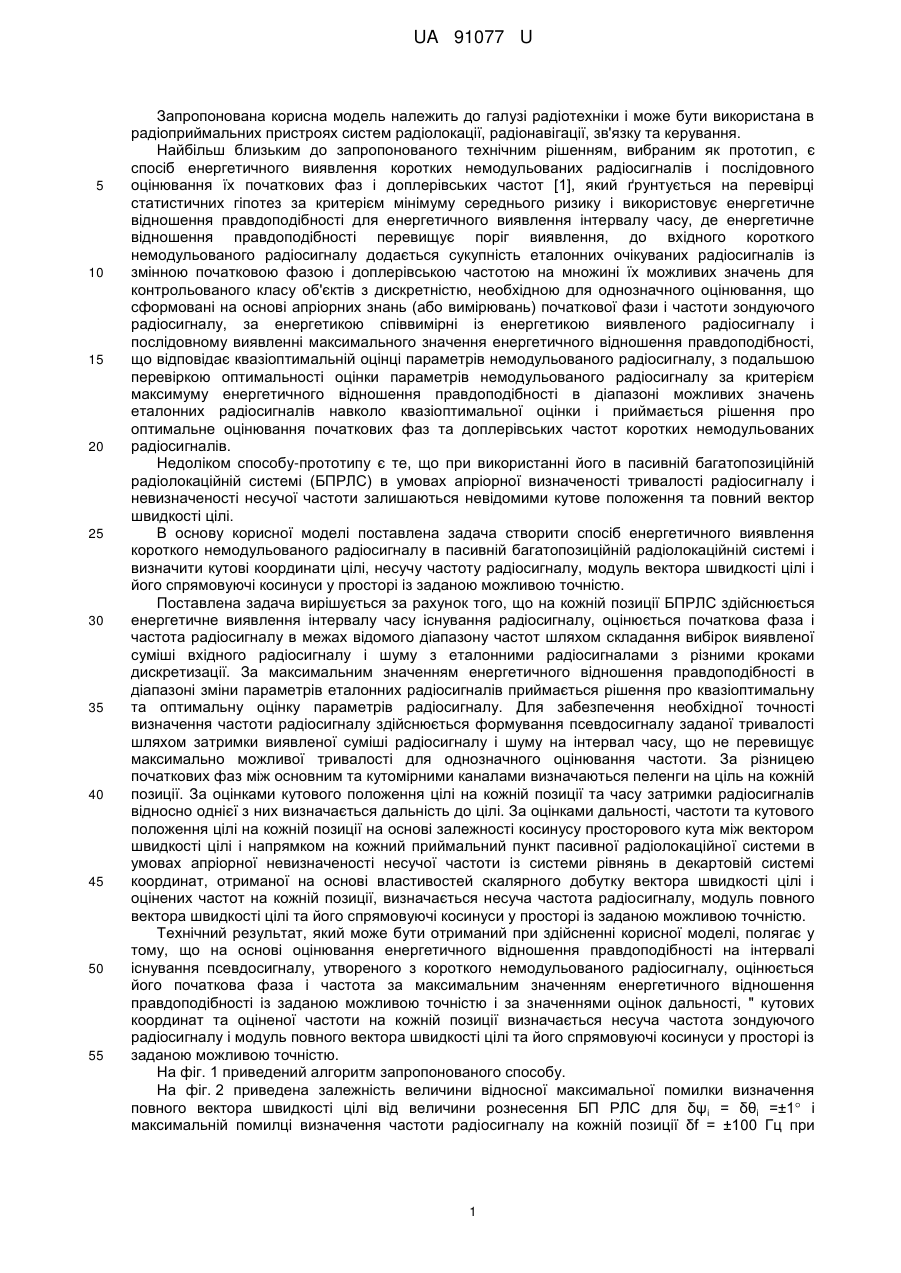
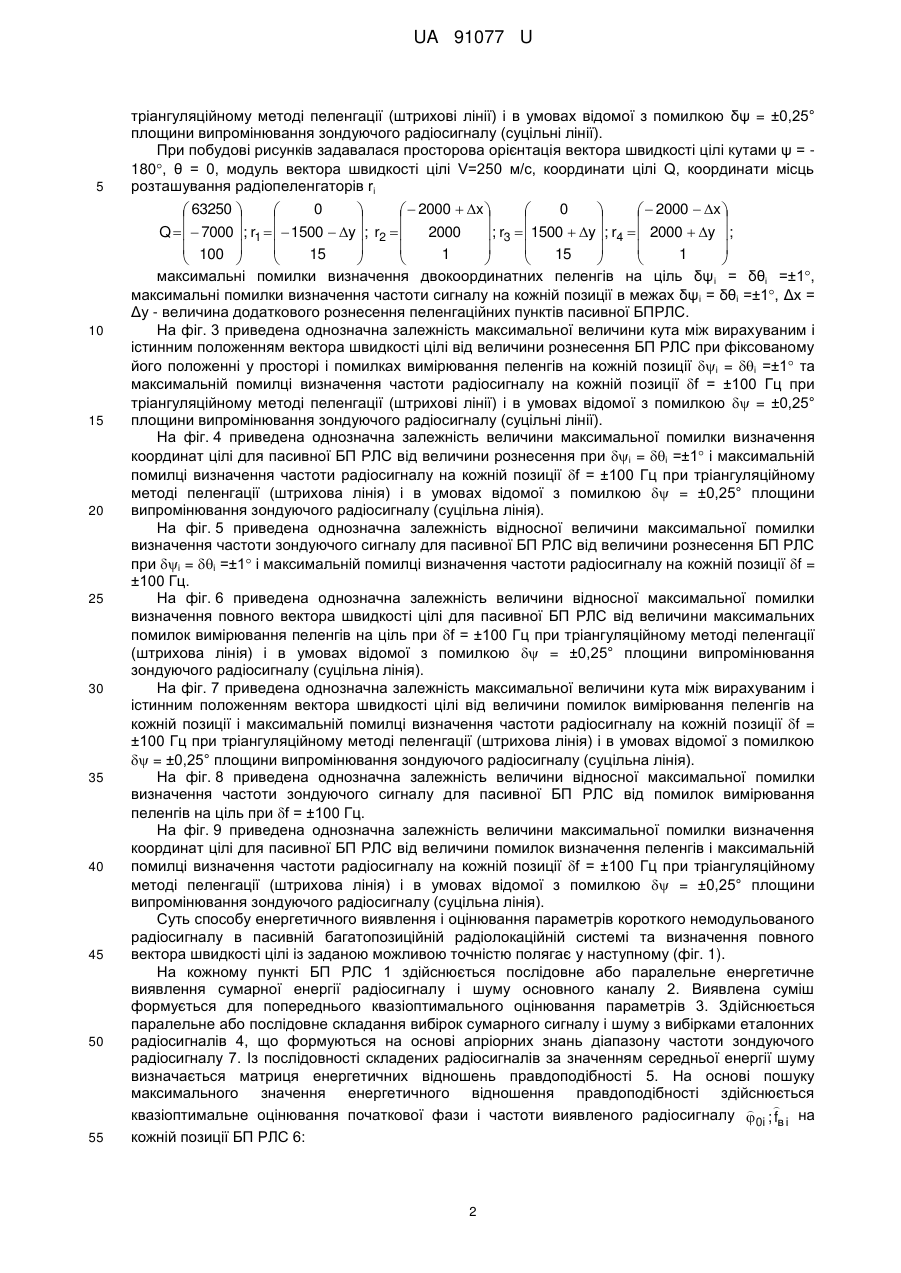
Реферат: Спосіб енергетичного виявлення і оцінювання параметрів короткого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою точністю ґрунтується на перевірці статистичних гіпотез за критерієм мінімуму середнього ризику і використовує енергетичне відношення правдоподібності для виявлення інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення з заданою ймовірністю хибних тривог, і здійснює оцінювання початкової фази і частоти радіосигналу на цьому інтервалі часу при послідовному складанні суміші вхідного радіосигналу і шуму із сукупністю еталонних очікуваних радіосигналів зі змінною початковою фазою і частотою на множині їх можливих значень з різною дискретністю за критерієм максимуму енергетичного відношення правдоподібності. Для оцінювання частоти радіосигналу із заданою можливою точністю на кожній позиції із виявленої вибірки вхідної реалізації формується псевдосигнал заданої тривалості, обмеженої умовою однозначності, та визначається різниця початкових фаз радіосигналів між основним і кутомірними радіоканалами для оцінювання кутового положення цілі. UA 91077 U (12) UA 91077 U UA 91077 U 5 10 15 20 25 30 35 40 45 50 55 Запропонована корисна модель належить до галузі радіотехніки і може бути використана в радіоприймальних пристроях систем радіолокації, радіонавігації, зв'язку та керування. Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є спосіб енергетичного виявлення коротких немодульованих радіосигналів і послідовного оцінювання їх початкових фаз і доплерівських частот [1], який ґрунтується на перевірці статистичних гіпотез за критерієм мінімуму середнього ризику і використовує енергетичне відношення правдоподібності для енергетичного виявлення інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення, до вхідного короткого немодульованого радіосигналу додається сукупність еталонних очікуваних радіосигналів із змінною початковою фазою і доплерівською частотою на множині їх можливих значень для контрольованого класу об'єктів з дискретністю, необхідною для однозначного оцінювання, що сформовані на основі апріорних знань (або вимірювань) початкової фази і частоти зондуючого радіосигналу, за енергетикою співвимірні із енергетикою виявленого радіосигналу і послідовному виявленні максимального значення енергетичного відношення правдоподібності, що відповідає квазіоптимальній оцінці параметрів немодульованого радіосигналу, з подальшою перевіркою оптимальності оцінки параметрів немодульованого радіосигналу за критерієм максимуму енергетичного відношення правдоподібності в діапазоні можливих значень еталонних радіосигналів навколо квазіоптимальної оцінки і приймається рішення про оптимальне оцінювання початкових фаз та доплерівських частот коротких немодульованих радіосигналів. Недоліком способу-прототипу є те, що при використанні його в пасивній багатопозиційній радіолокаційній системі (БПРЛС) в умовах апріорної визначеності тривалості радіосигналу і невизначеності несучої частоти залишаються невідомими кутове положення та повний вектор швидкості цілі. В основу корисної моделі поставлена задача створити спосіб енергетичного виявлення короткого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі і визначити кутові координати цілі, несучу частоту радіосигналу, модуль вектора швидкості цілі і його спрямовуючі косинуси у просторі із заданою можливою точністю. Поставлена задача вирішується за рахунок того, що на кожній позиції БПРЛС здійснюється енергетичне виявлення інтервалу часу існування радіосигналу, оцінюється початкова фаза і частота радіосигналу в межах відомого діапазону частот шляхом складання вибірок виявленої суміші вхідного радіосигналу і шуму з еталонними радіосигналами з різними кроками дискретизації. За максимальним значенням енергетичного відношення правдоподібності в діапазоні зміни параметрів еталонних радіосигналів приймається рішення про квазіоптимальну та оптимальну оцінку параметрів радіосигналу. Для забезпечення необхідної точності визначення частоти радіосигналу здійснюється формування псевдосигналу заданої тривалості шляхом затримки виявленої суміші радіосигналу і шуму на інтервал часу, що не перевищує максимально можливої тривалості для однозначного оцінювання частоти. За різницею початкових фаз між основним та кутомірними каналами визначаються пеленги на ціль на кожній позиції. За оцінками кутового положення цілі на кожній позиції та часу затримки радіосигналів відносно однієї з них визначається дальність до цілі. За оцінками дальності, частоти та кутового положення цілі на кожній позиції на основі залежності косинусу просторового кута між вектором швидкості цілі і напрямком на кожний приймальний пункт пасивної радіолокаційної системи в умовах апріорної невизначеності несучої частоти із системи рівнянь в декартовій системі координат, отриманої на основі властивостей скалярного добутку вектора швидкості цілі і оцінених частот на кожній позиції, визначається несуча частота радіосигналу, модуль повного вектора швидкості цілі та його спрямовуючі косинуси у просторі із заданою можливою точністю. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у тому, що на основі оцінювання енергетичного відношення правдоподібності на інтервалі існування псевдосигналу, утвореного з короткого немодульованого радіосигналу, оцінюється його початкова фаза і частота за максимальним значенням енергетичного відношення правдоподібності із заданою можливою точністю і за значеннями оцінок дальності, " кутових координат та оціненої частоти на кожній позиції визначається несуча частота зондуючого радіосигналу і модуль повного вектора швидкості цілі та його спрямовуючі косинуси у просторі із заданою можливою точністю. На фіг. 1 приведений алгоритм запропонованого способу. На фіг. 2 приведена залежність величини відносної максимальної помилки визначення повного вектора швидкості цілі від величини рознесення БП РЛС для δψ і = δθі =±1 і максимальній помилці визначення частоти радіосигналу на кожній позиції δf = ±100 Гц при 1 UA 91077 U 5 10 15 20 25 30 35 40 45 50 55 тріангуляційному методі пеленгації (штрихові лінії) і в умовах відомої з помилкою δψ = ±0,25° площини випромінювання зондуючого радіосигналу (суцільні лінії). При побудові рисунків задавалася просторова орієнтація вектора швидкості цілі кутами ψ = 180, θ = 0, модуль вектора швидкості цілі V=250 м/с, координати цілі Q, координати місць розташування радіопеленгаторів ri 0 0 63250 2000 x 2000 x Q 7000 ; r1 1500 y ; r2 2000 ; r3 1500 y ; r4 2000 y ; 100 15 1 15 1 максимальні помилки визначення двокоординатних пеленгів на ціль δψ і = δθі =±1, максимальні помилки визначення частоти сигналу на кожній позиції в межах δψ і = δθі =±1, Δх = Δу - величина додаткового рознесення пеленгаційних пунктів пасивної БПРЛС. На фіг. 3 приведена однозначна залежність максимальної величини кута між вирахуваним і істинним положенням вектора швидкості цілі від величини рознесення БП РЛС при фіксованому його положенні у просторі і помилках вимірювання пеленгів на кожній позиції і = і =±1 та максимальній помилці визначення частоти радіосигналу на кожній позиції f = ±100 Гц при тріангуляційному методі пеленгації (штрихові лінії) і в умовах відомої з помилкою = ±0,25° площини випромінювання зондуючого радіосигналу (суцільні лінії). На фіг. 4 приведена однозначна залежність величини максимальної помилки визначення координат цілі для пасивної БП РЛС від величини рознесення при і = і =±1 і максимальній помилці визначення частоти радіосигналу на кожній позиції f = ±100 Гц при тріангуляційному методі пеленгації (штрихова лінія) і в умовах відомої з помилкою = ±0,25° площини випромінювання зондуючого радіосигналу (суцільна лінія). На фіг. 5 приведена однозначна залежність відносної величини максимальної помилки визначення частоти зондуючого сигналу для пасивної БП РЛС від величини рознесення БП РЛС при і = і =±1 і максимальній помилці визначення частоти радіосигналу на кожній позиції f = ±100 Гц. На фіг. 6 приведена однозначна залежність величини відносної максимальної помилки визначення повного вектора швидкості цілі для пасивної БП РЛС від величини максимальних помилок вимірювання пеленгів на ціль при f = ±100 Гц при тріангуляційному методі пеленгації (штрихова лінія) і в умовах відомої з помилкою = ±0,25° площини випромінювання зондуючого радіосигналу (суцільна лінія). На фіг. 7 приведена однозначна залежність максимальної величини кута між вирахуваним і істинним положенням вектора швидкості цілі від величини помилок вимірювання пеленгів на кожній позиції і максимальній помилці визначення частоти радіосигналу на кожній позиції f = ±100 Гц при тріангуляційному методі пеленгації (штрихова лінія) і в умовах відомої з помилкою = ±0,25° площини випромінювання зондуючого радіосигналу (суцільна лінія). На фіг. 8 приведена однозначна залежність величини відносної максимальної помилки визначення частоти зондуючого сигналу для пасивної БП РЛС від помилок вимірювання пеленгів на ціль при f = ±100 Гц. На фіг. 9 приведена однозначна залежність величини максимальної помилки визначення координат цілі для пасивної БП РЛС від величини помилок визначення пеленгів і максимальній помилці визначення частоти радіосигналу на кожній позиції f = ±100 Гц при тріангуляційному методі пеленгації (штрихова лінія) і в умовах відомої з помилкою = ±0,25° площини випромінювання зондуючого радіосигналу (суцільна лінія). Суть способу енергетичного виявлення і оцінювання параметрів короткого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою точністю полягає у наступному (фіг. 1). На кожному пункті БП РЛС 1 здійснюється послідовне або паралельне енергетичне виявлення сумарної енергії радіосигналу і шуму основного каналу 2. Виявлена суміш формується для попереднього квазіоптимального оцінювання параметрів 3. Здійснюється паралельне або послідовне складання вибірок сумарного сигналу і шуму з вибірками еталонних радіосигналів 4, що формуються на основі апріорних знань діапазону частоти зондуючого радіосигналу 7. Із послідовності складених радіосигналів за значенням середньої енергії шуму визначається матриця енергетичних відношень правдоподібності 5. На основі пошуку максимального значення енергетичного відношення правдоподібності здійснюється квазіоптимальне оцінювання початкової фази і частоти виявленого радіосигналу 0i ; fв і на кожній позиції БП РЛС 6: 2 UA 91077 U Wci max 0 i 0 де 5 Wш Wci 15 20 25 30 0 i f fmin...fmax ; 0 0... 2, y1 m t i = n 2 Σ{у, oцінка n 2 2 1n ni m t i1 ni m t j2 ... i 0 j0 дисперсії нероздільної суми амплітуд оцінка усередненого значення дисперсії амплітуд вхідної реалізації шуму на Μ інтервалах рівних тривалості радіосигналу, яка еквівалентна оцінці її усередненої енергії. Ця оцінка частоти і початкової фази є обмеженням діапазону зміни параметрів еталонних радіосигналів для формування вибірок еталонних радіосигналів з меншим кроком дискретизації навколо квазіоптимальної оцінки для уточнення частоти і початкової фази 8. Виявлена суміш затримується на інтервал часу mτ для формування псевдосигналу заданої тривалості 14. Вибірки еталонних радіосигналів складаються із вибірками псевдосигналу заданої тривалості 12. Здійснюється формування матриці енергетичних відношень правдоподібності і пошук їх максимального значення 11. За оцінками частоти 11 в основному каналі здійснюється оцінка початкових фаз кутомірних каналів 13. Оцінюються різниці початкових фаз кутомірних і основного каналів 10. Визначаються кутові координати цілі у місцевій декартовій системі n xi, nyi, nzi 9: n xi cos i cos i n y i sin i cos i , n sin i zi де , - азимут і кут місця цілі в сферичній системі координат. Здійснюється ототожнення оцінок координат на загальній позиції за часом затримки і визначаються координати цілі відомими способами (тріангуляційним або різничнодальномірним) 15. Надлишок інформації використовується для підвищення точності оцінювання координат цілі. У місцевій декартовій системі координат із системи рівнянь оцінюється несуча частота виявленого радіосигналу, модуль повного вектора швидкості цілі і його спрямовуючі косинуси 16. Система рівнянь в координатній формі, що дозволяє визначити спрямовуючі косинуси вектора швидкості цілі nx, ny, nz, його модуль та несучу частоту f 0 випромінюваного радіосигналу, має вигляд: Vr 0 V n x n x0 n y n y0 n z n z0 ; Vr1 V n x n x1 n y n y1 n z n z1 ; V V n n n n n n ; x x2 y y2 z z2 r2 Vr 3 V n x n x3 n y n y3 n z n z3 ; n 2 n 2 n 2 1. x y z 35 -m] i0 сигналу+шуму на інтервалі рівному тривалості радіосигналу, що еквівалентна оцінці її енергії; n - загальна кількість дискретних вимірів на інтервалі статистичного аналізу τ; W ст - рівень енергії еталонних радіосигналів в діапазоні можливих значень доплерівської частоти і початкової фази співвимірний з енергією внутрішнього шуму; Wш 10 Wет (1) Значення модулів радіальних складових вектора швидкості цілі Vri визначаються через виміряні значення частоти fв0,fв1,fв2,fв3 на кожному пункті і значення невідомої несучої частоти f 0 випромінюваного радіосигналу: cf cf с с Vr 0 в0 ; Vr1 в1 ; 2f0 2 2f0 2 cf cfв2 с с ; Vr 3 в3 ; 2f0 2 2f0 2 де с - швидкість світла. В системі рівнянь відомими величинами є спрямовуючі косинуси n xi, nyi, nzj пеленгів на ціль з кожної позиції і оцінені частоти fв0,fв1,fв2,fв3, a невідомими - спрямовуючі косинуси вектора Vr 2 3 UA 91077 U 5 швидкості цілі nx, ny, nz, модуль вектора швидкості цілі V та несуча частота прийнятого радіосигналу f0 на кожній позиції. Система рівнянь (1) має точне рішення. Із рішення, системи рівнянь (І) слідує значення несучої частоти прийнятих радіосигналів: a a5 f0 3 , a4 a6 де b a0 c a0 b a c a a3 0 ; a 4 1 1 ; a5 0 ; a3 1 1 ; b2 a2 b2 a2 c 2 a2 c 2 a2 a0 cfв0 / 2n z0 cfв1 / 2n z1 cf / 2n z3 cfв2 / 2n z2 cf / 2n z2 cfв1 / 2n z1 ; b 0 в3 ; c 0 в2 ; n y0 / n z0 n y1 / n z1 n y 3 / n z3 n y 2 / n z 2 n y 2 / n z2 n y1 / n z1 c / 2n z0 c / 2n z1 c / 2n z3 c / 2n z2 c / 2n z2 c / 2n z1 ; b1 ; c1 ; n y0 / n z0 n y1 / n z1 n y 3 / n z3 n y 2 / n z 2 n y 2 / n z2 n y1 / n z1 . n x0 / n z0 n x1 / n z1 n x 3 / n z3 n x 2 / n z 2 n x 2 / n z2 n x1 / n z1 a2 ; b2 ; c2 ; n y0 / n z0 n y1 / n z1 n y 3 / n z3 n y 2 / n z 2 n y 2 / n z2 n y1 / n z1 Спрямовуючі косинуси вектора швидкості цілі визначаються виразами: a1 10 nx де y y x z x , ny , nz z , V V V n x 0 n y 0 n z0 Vr 0 n y0 1 n x1 n y1 n z1 ; x Vr1 n y1 V n x 2 n y 2 n z2 Vr 2 n y 2 n x0 1 y n x1 V n x2 Vr 0 n z0 n x0 1 Vr1 n z1 ; z n x1 V Vr 2 n z2 n x2 n z0 n z1 ; n z2 n y0 n y1 n y2 . Vr 0 Vr1 ; Vr 2 Модуль вектора швидкості визначається за умови нормування спрямовуючих косинусів n 2 n2 x y 15 20 25 30 V n2 1: z x 2 y 2 2 z 2 , де x , y , z - детермінанти відповідних матриць. Якісні показники оцінювання повного вектора швидкості цілі: - відносна помилка визначення модуля повного вектора швидкості цілі як відношення різниці між вирахуваною швидкістю цілі при заданих помилках і заданою швидкістю до цієї ж швидкості цілі V Vв V ; V V - кут відхилення просторової орієнтації вирахуваного значення вектора швидкості цілі від істинного напрямку польоту цілі Δθ = arcos (nх nxв +ny nyв +nznzв), де nxв, nyв, nzв - спрямовуючі косинуси визначеного вектора швидкості цілі при урахуванні всіх помилок, що характеризують процес його визначення. - відносна максимальна помилка визначення несучої частоти сигналу як відношення різниці між розрахованою частотою і істинною до істинного значення частоти f 0: f f0p f0 , f0 f0 Af=f, ,p-f0 де f0p - розраховане значення несучої частоти сигналу, що випромінюється ціллю. Джерело інформації: 1. Патент на корисну модель 75125. Україна, МПК GO IS 7/34. Спосіб енергетичного виявлення коротких немодульованих радіосигналів і послідовного оцінювання їх початкових фаз 4 UA 91077 U і доплерівських частот / Г.В. Певцов, А.Я. Яцуценко та ін. - №2012004731; заявл. 17.04.2012; опубл. 26.11.2012, Бюл. № 22. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 Спосіб енергетичного виявлення і оцінювання параметрів короткого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою точністю, який ґрунтується на перевірці статистичних гіпотез за критерієм мінімуму середнього ризику і використовує енергетичне відношення правдоподібності для виявлення інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення з заданою ймовірністю хибних тривог, і здійснює оцінювання початкової фази і частоти радіосигналу на цьому інтервалі часу при послідовному складанні суміші вхідного радіосигналу і шуму із сукупністю еталонних очікуваних радіосигналів зі змінною початковою фазою і частотою на множині їх можливих значень з різною дискретністю за критерієм максимуму енергетичного відношення правдоподібності, який відрізняється тим, що для оцінювання частоти радіосигналу із заданою можливою точністю на кожній позиції із виявленої вибірки вхідної реалізації формується псевдосигнал заданої тривалості, обмеженої умовою однозначності, та визначається різниця початкових фаз радіосигналів між основним і кутомірними радіоканалами для оцінювання кутового положення цілі, за оцінками якого на кожній позиції та часом затримки радіосигналів відносно однієї з них здійснюється ідентифікація вимірів однієї цілі за часом, визначається дальність до цілі відомими способами (тріангуляційним або різнично-дальномірним) і із системи рівнянь в декартовій системі координат, отриманої на основі властивостей скалярного добутку повного вектора швидкості цілі і виражених його радіальних складових через оцінені частоти на кожній позиції, визначається несуча частота, модуль повного вектора швидкості цілі та його спрямовуючі косинуси у просторі із заданою можливою точністю. 5 UA 91077 U 6 UA 91077 U 7 UA 91077 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Автори англійськоюPevtsov Hennadii Volodymyrovych, Yatsutsenko Anatolii Yakovych, Kukharskyi Ihor Andriiovych, Trofymenko Yurii Valentynovych, Karlov Dmytro Volodymyrovych
Автори російськоюПевцов Геннадий Владимирович, Яцуценко Анатолий Яковлевич, Кухарский Игорь Андреевич, Трофименко Юрий Валентинович, Карлов Дмитрий Владимирович
МПК / Мітки
МПК: G01S 7/34
Мітки: енергетичного, параметрів, багатопозиційний, оцінювання, радіосигналу, можливою, визначення, швидкості, заданою, системі, цілі, виявлення, немодульованого, повного, пасивний, вектора, спосіб, короткого, радіолокаційний
Код посилання
<a href="https://ua.patents.su/10-91077-sposib-energetichnogo-viyavlennya-i-ocinyuvannya-parametriv-korotkogo-nemodulovanogo-radiosignalu-v-pasivnijj-bagatopozicijjnijj-radiolokacijjnijj-sistemi-ta-viznachennya-povnogo-v.html" target="_blank" rel="follow" title="База патентів України">Спосіб енергетичного виявлення і оцінювання параметрів короткого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою</a>
Спосіб енергетичного виявлення короткого немодульованого радіосигналу і послідовного оцінювання його початкової фази і доплерівської частоти із заданою можливою точністю
Номер патенту: 86648
Опубліковано: 10.01.2014
Автори: Пєвцов Геннадій Володимирович, Трофименко Юрій Валентинович, Карлов Дмитро Володимирович, Борцова Марія Вікторівна, Яцуценко Анатолій Якович, Чернявський Олег Юрійович, Пічугін Михайло Федорович, Кухарський Ігор Андрійович
МПК: G01S 7/34
Мітки: можливою, оцінювання, точністю, радіосигналу, частоти, послідовного, доплерівської, фазі, спосіб, заданою, початкової, короткого, виявлення, немодульованого, енергетичного
Формула / Реферат:
Спосіб енергетичного виявлення короткого немодульованого радіосигналу і послідовного оцінювання його початкової фази і доплерівської частоти з заданою можливою точністю, який ґрунтується на перевірці статистичних гіпотез за критерієм мінімуму середнього ризику і використовує енергетичне відношення правдоподібності для виявлення інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення з заданою ймовірністю хибних...
Спосіб енергетичного виявлення тривалого немодульованого радіосигналу і послідовного оцінювання його початкової фази і доплерівської частоти із заданою можливою точністю
Номер патенту: 86646
Опубліковано: 10.01.2014
Автори: Пічугін Михайло Федорович, Яцуценко Анатолій Якович, Пєвцов Геннадій Володимирович, Карлов Дмитро Володимирович, Трофименко Юрій Валентинович, Чуб Сергій Вікторович, Чернявський Олег Юрійович, Борцова Марія Вікторівна
МПК: G01S 7/34
Мітки: енергетичного, радіосигналу, оцінювання, частоти, доплерівської, точністю, тривалого, фазі, спосіб, можливою, заданою, немодульованого, початкової, послідовного, виявлення
Формула / Реферат:
Спосіб енергетичного виявлення тривалого немодульованого радіосигналу і послідовного оцінювання його початкової фази і доплерівської частоти з заданою можливою точністю, який ґрунтується на енергетичному виявленні інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення із заданою ймовірністю хибних тривог, суміш амплітуд тривалого немодульованого радіосигналу і шуму, з якої формуються вибірки різної тривалості і...
Спосіб енергетичного виявлення тривалого немодульованого радіосигналу і послідовного оцінювання його початкової фази і частоти
Номер патенту: 75126
Опубліковано: 26.11.2012
Автори: Яцуценко Анатолій Якович, Карлов Дмитро Володимирович, Клімішен Олексій Олегович, Остапова Алла Миколаївна, Пєвцов Геннадій Володимирович, Трофименко Юрій Валентинович
МПК: G01S 7/34
Мітки: послідовного, частоти, виявлення, радіосигналу, фазі, енергетичного, оцінювання, спосіб, немодульованого, тривалого, початкової
Формула / Реферат:
Спосіб енергетичного виявлення тривалого радіосигналу і послідовного оцінювання його початкової фази і доплерівської частоти, який ґрунтується на перевірці статистичних гіпотез за критерієм мінімуму середнього ризику і використовує енергетичне відношення правдоподібності, який відрізняється тим, що після енергетичного виявлення інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення, до вхідного радіосигналу, з...
Спосіб енергетичного виявлення коротких немодульованих радіосигналів і послідовного оцінювання їх початкових фаз і доплерівських частот та різниці фаз між основним та кутомірними каналами
Номер патенту: 86649
Опубліковано: 10.01.2014
Автори: Борцова Марія Вікторівна, Яцуценко Анатолій Якович, Трофименко Юрій Валентинович, Чернявський Олег Юрійович, Карлов Дмитро Володимирович, Добудько Володимир Миколайович, Пічугін Михайло Федорович, Пєвцов Геннадій Володимирович
МПК: G01S 7/34
Мітки: доплерівських, спосіб, фаз, різниці, основним, оцінювання, енергетичного, коротких, каналами, немодульованих, початкових, частот, радіосигналів, кутомірними, виявлення, послідовного
Формула / Реферат:
Спосіб енергетичного виявлення коротких немодульованих радіосигналів і послідовного оцінювання їх початкових фаз і доплерівських частот та різниці фаз між основним та кутомірними каналами, який ґрунтується на перевірці статистичних гіпотез за критерієм мінімуму середнього ризику і використовує енергетичне відношення правдоподібності для виявлення інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення з заданою...
Спосіб енергетичного виявлення коротких немодульованих радіосигналів і послідовного оцінювання їх початкових фаз і доплерівських частот
Номер патенту: 75125
Опубліковано: 26.11.2012
Автори: Клімішен Олексій Олегович, Пєвцов Геннадій Володимирович, Остапова Алла Миколаївна, Яцуценко Анатолій Якович, Карлов Дмитро Володимирович, Трофименко Юрій Валентинович
МПК: G01S 7/34
Мітки: доплерівських, виявлення, енергетичного, початкових, частот, коротких, оцінювання, спосіб, немодульованих, радіосигналів, фаз, послідовного
Формула / Реферат:
Спосіб енергетичного виявлення коротких немодульованих радіосигналів і послідовного оцінювання їх початкових фаз і доплерівських частот, який ґрунтується на перевірці статистичних гіпотез за критерієм мінімуму середнього ризику і використовує енергетичне відношення правдоподібності, який відрізняється тим, що після енергетичного виявлення інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення, до вхідного...
Попередній патент: Прикочуючий коток сівалки
Наступний патент: Спосіб готування суміші для горячого шоколаду
Випадковий патент: Установка для віброімпульсної обробки розплавленого металу