Спосіб лазерного контролю обертів “w1″ і “w2″ приводів f1(drivew) і f2(drivew) генераторів f1(generuw1-3) і f2(generuw1-3) при підключенні їх до загального зовнішнього навантаження fn(lh,rh)
Номер патенту: 104564
Опубліковано: 10.02.2016
Автори: Ушкаренко Олександр Олегович, Рябенький Володимир Михайлович

Формула / Реферат
Спосіб лазерного контролю обертів ″ω1″ і ″ω2″ приводів ![]() і
і ![]() генераторів
генераторів ![]() і
і ![]() при підключенні їх до загального зовнішнього навантаження
при підключенні їх до загального зовнішнього навантаження ![]() , в якому у відповідності з математичною моделлю виду
, в якому у відповідності з математичною моделлю виду
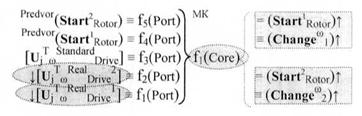
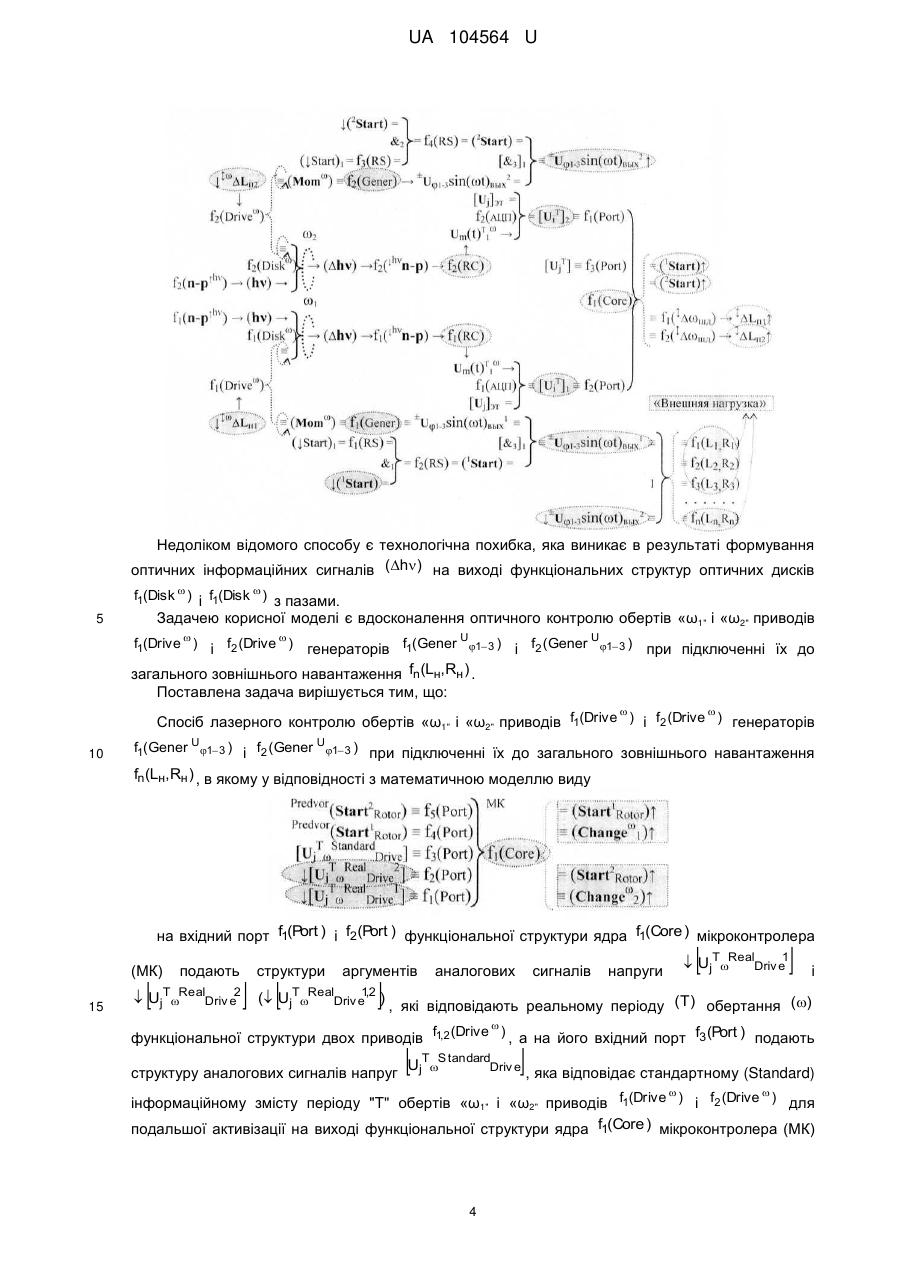
на вхідний порт ![]() і
і ![]() функціональної структури ядра
функціональної структури ядра ![]() мікроконтролера (МК) подають структури аргументів аналогових сигналів напруги
мікроконтролера (МК) подають структури аргументів аналогових сигналів напруги ![]() і
і ![]()
![]() , які відповідають реальному періоду
, які відповідають реальному періоду ![]() обертання
обертання ![]() функціональної структури двох приводів
функціональної структури двох приводів ![]() , а на його вхідний порт
, а на його вхідний порт ![]() подають структуру аналогових сигналів напруг
подають структуру аналогових сигналів напруг ![]() , яка відповідає стандартному (Standard) інформаційному змісту періоду ″T″ обертів ″ω1″ і ″ω2″приводів
, яка відповідає стандартному (Standard) інформаційному змісту періоду ″T″ обертів ″ω1″ і ″ω2″приводів ![]() і
і ![]() для подальшої активізації на виході функціональної структури ядра
для подальшої активізації на виході функціональної структури ядра ![]() мікроконтролера (МК) аргументів зміни
мікроконтролера (МК) аргументів зміни ![]() і
і ![]() обертів ″ω1″ і ″ω2″ роторів першого і другого приводів
обертів ″ω1″ і ″ω2″ роторів першого і другого приводів ![]() і
і ![]() , але цю процедуру виконують після подачі попередніх аргументів
, але цю процедуру виконують після подачі попередніх аргументів ![]() і
і ![]() старту ротора відповідного приводу і їх подають на входи портів
старту ротора відповідного приводу і їх подають на входи портів ![]() і
і ![]() функціональної структури ядра
функціональної структури ядра ![]() мікроконтролера (МК) для активізації аргументів
мікроконтролера (МК) для активізації аргументів ![]() і
і ![]() на виході функціональної структури ядра
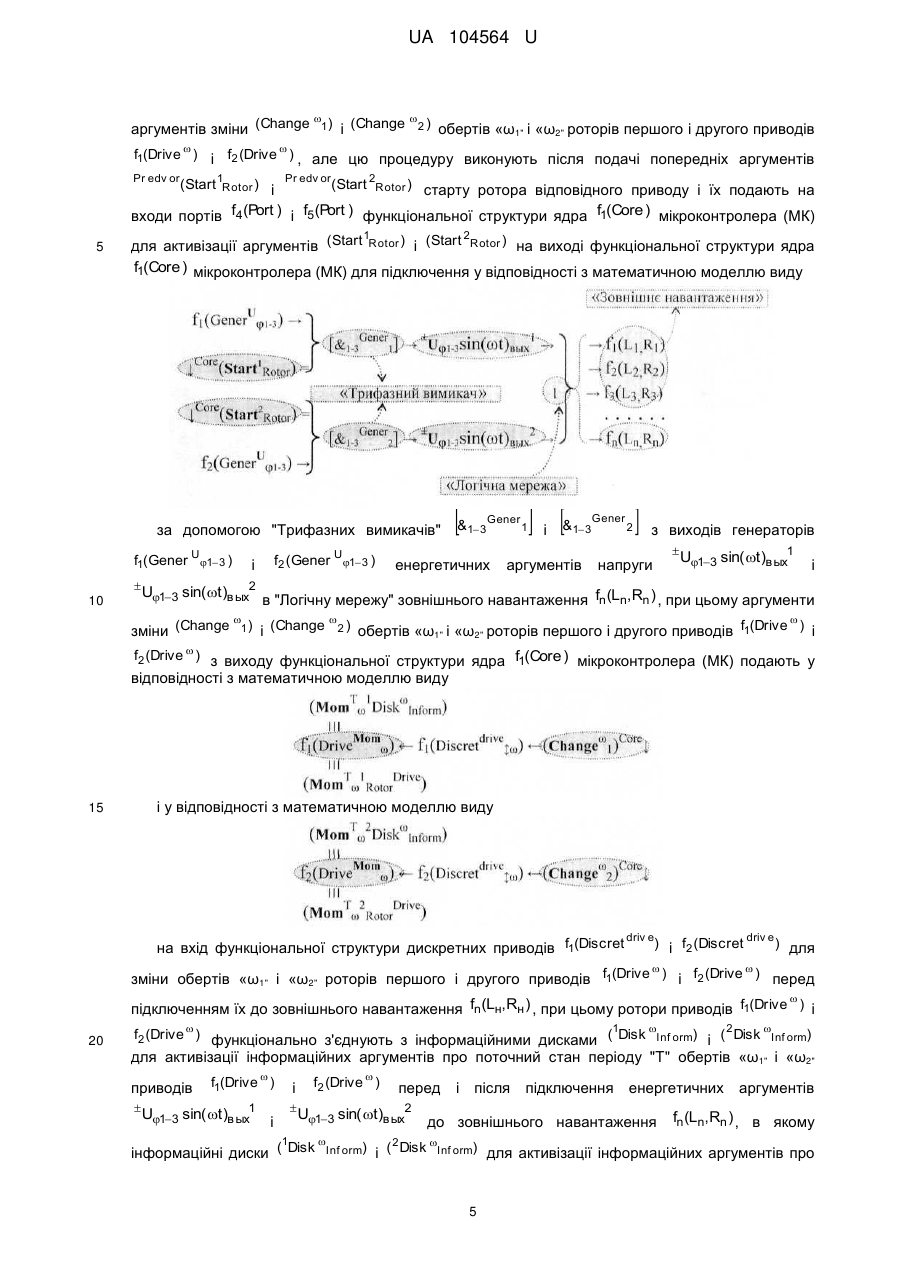
на виході функціональної структури ядра ![]() мікроконтролера (МК) для підключення у відповідності з математичною моделлю виду
мікроконтролера (МК) для підключення у відповідності з математичною моделлю виду
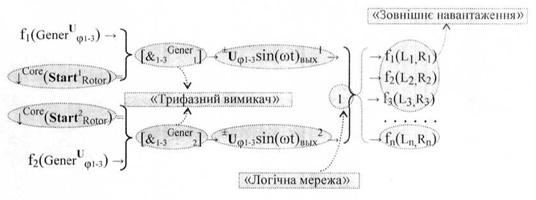
за допомогою ″Трифазних вимикачів″ ![]() і
і ![]() з виходів генераторів
з виходів генераторів ![]() і
і ![]() енергетичних аргументів напруги
енергетичних аргументів напруги ![]() і
і ![]() в ″Логічну мережу″ зовнішнього навантаження
в ″Логічну мережу″ зовнішнього навантаження ![]() , при цьому аргументи зміни
, при цьому аргументи зміни ![]() і
і ![]() обертів ″ω1″ і ″ω2″ роторів першого і другого приводів
обертів ″ω1″ і ″ω2″ роторів першого і другого приводів ![]() і
і ![]() з виходу функціональної структури ядра
з виходу функціональної структури ядра ![]() мікроконтролера (МК) подають у відповідності з математичною моделлю виду
мікроконтролера (МК) подають у відповідності з математичною моделлю виду
і у відповідності з математичною моделлю виду

на вхід функціональної структури дискретних приводів ![]() і
і ![]() для зміни обертів ″ω1″і ″ω2″ роторів першого і другого приводів
для зміни обертів ″ω1″і ″ω2″ роторів першого і другого приводів ![]() і
і ![]() перед підключенням їх до зовнішнього навантаження
перед підключенням їх до зовнішнього навантаження ![]() , при цьому ротори приводів
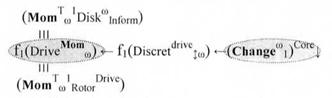
, при цьому ротори приводів ![]() і
і ![]() функціонально з'єднують з інформаційними дисками
функціонально з'єднують з інформаційними дисками ![]() і
і ![]() для активізації інформаційних аргументів про поточний стан періоду ″T″ обертів ″ω1″ і ″ω2″ приводів
для активізації інформаційних аргументів про поточний стан періоду ″T″ обертів ″ω1″ і ″ω2″ приводів ![]() і
і ![]() перед і після підключення енергетичних аргументів
перед і після підключення енергетичних аргументів ![]() і
і ![]() до зовнішнього навантаження
до зовнішнього навантаження ![]() , який відрізняється тим, що інформаційні диски
, який відрізняється тим, що інформаційні диски ![]() і
і ![]() для активізації інформаційних аргументів про поточний стан періоду ″T″ обертів ″ω1″ і ″ω2″ приводів
для активізації інформаційних аргументів про поточний стан періоду ″T″ обертів ″ω1″ і ″ω2″ приводів ![]() і
і ![]() виконують у відповідності з математичною моделлю виду
виконують у відповідності з математичною моделлю виду

і у відповідності з математичною моделлю виду

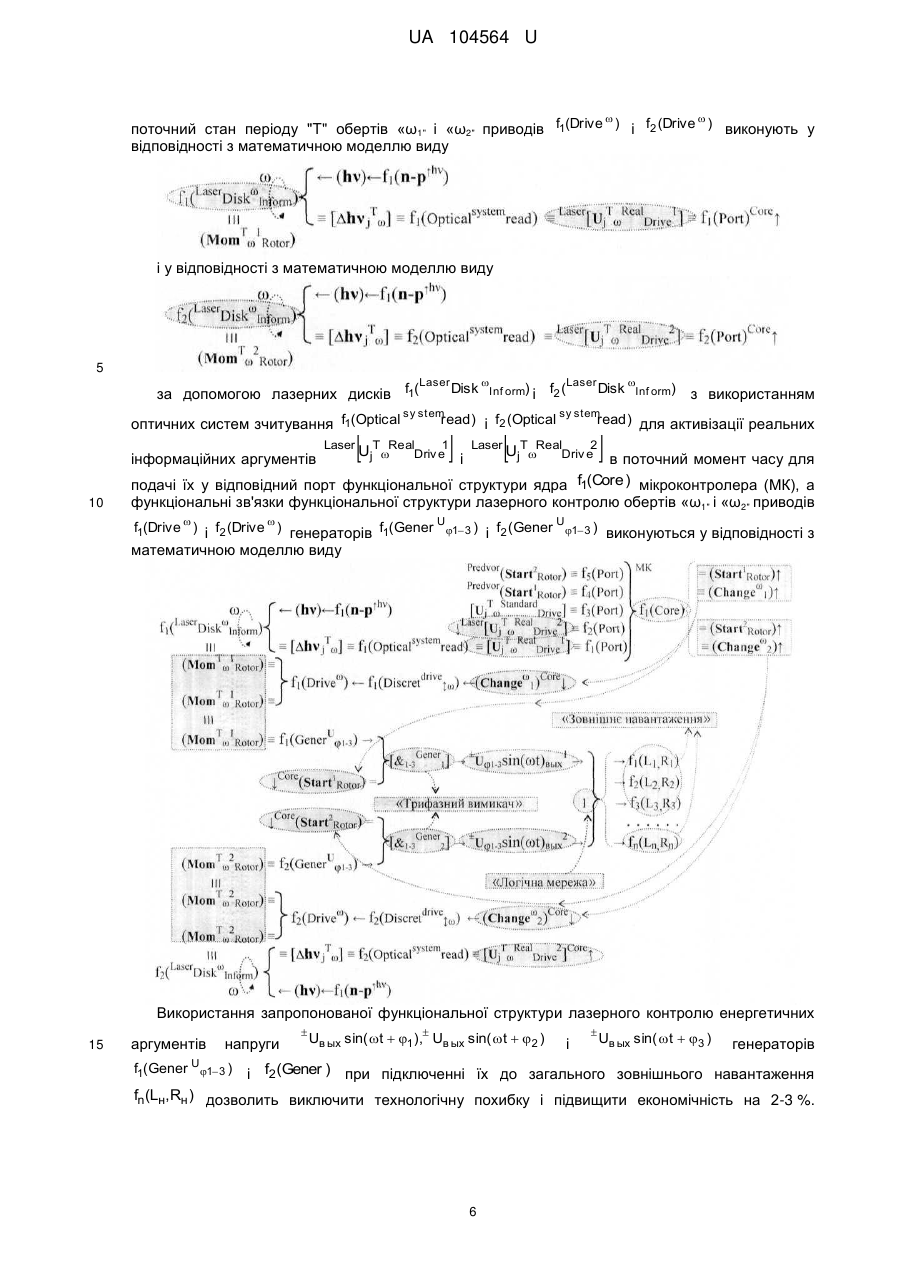
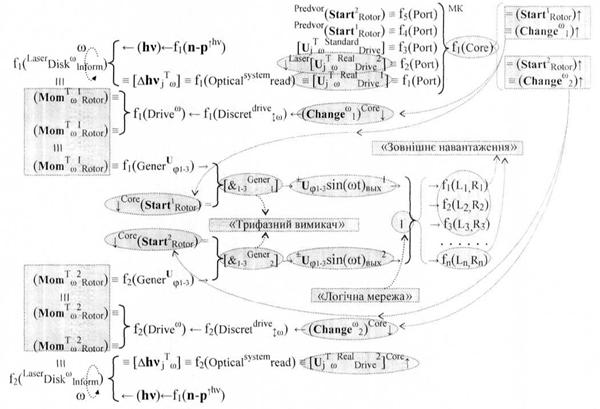
за допомогою лазерних дисків ![]() і
і ![]() з використанням оптичних систем зчитування
з використанням оптичних систем зчитування ![]() і
і ![]() для активізації реальних інформаційних аргументів
для активізації реальних інформаційних аргументів ![]() і
і ![]() в поточний момент часу для подачі їх у відповідний порт функціональної структури ядра
в поточний момент часу для подачі їх у відповідний порт функціональної структури ядра ![]() мікроконтролера (МК), а функціональні зв'язки функціональної структури лазерного контролю обертів ″ω1″ і ″ω2″ приводів
мікроконтролера (МК), а функціональні зв'язки функціональної структури лазерного контролю обертів ″ω1″ і ″ω2″ приводів ![]() і
і ![]() генераторів
генераторів ![]() і
і ![]() виконуються у відповідності з математичною моделлю виду
виконуються у відповідності з математичною моделлю виду
 .
.
Текст
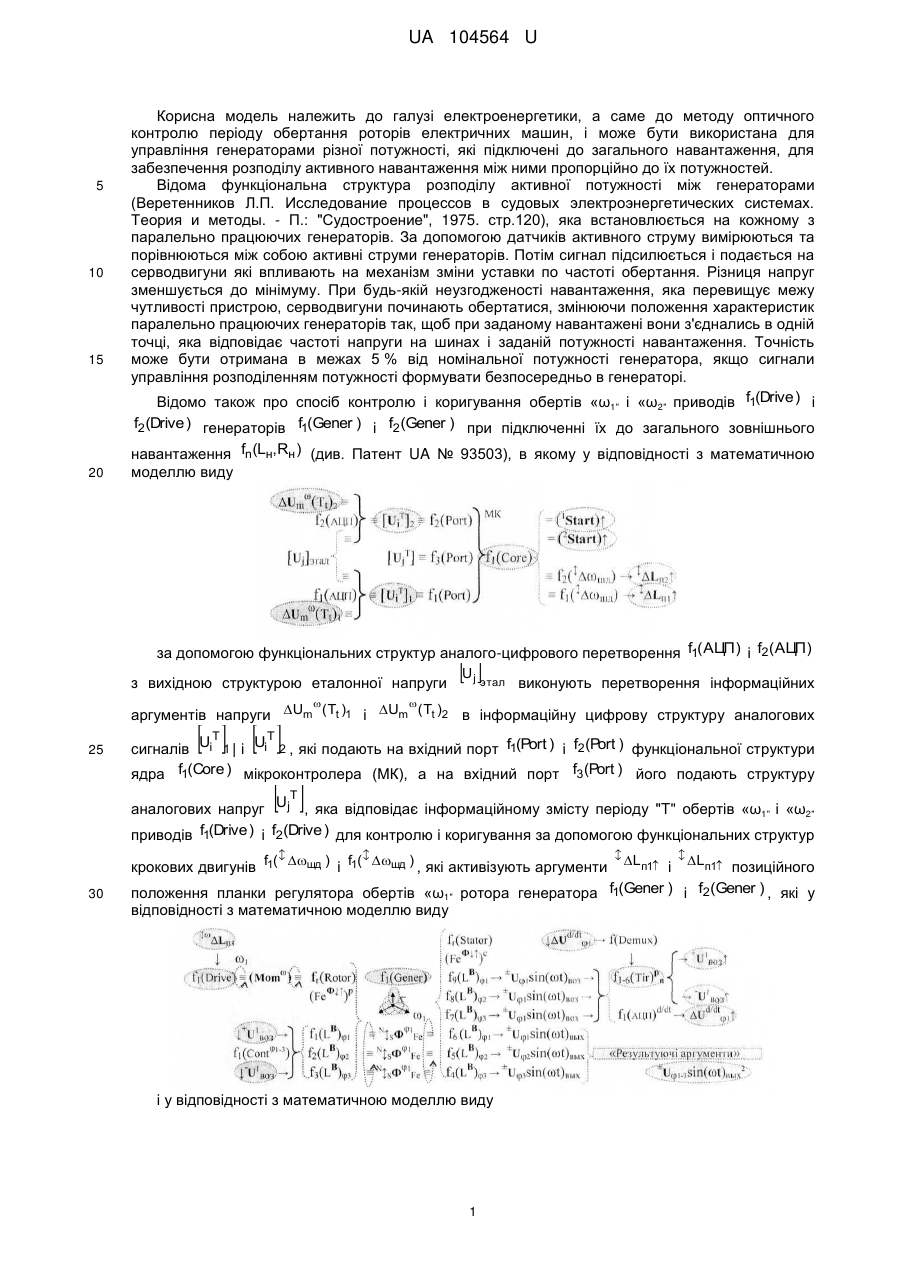
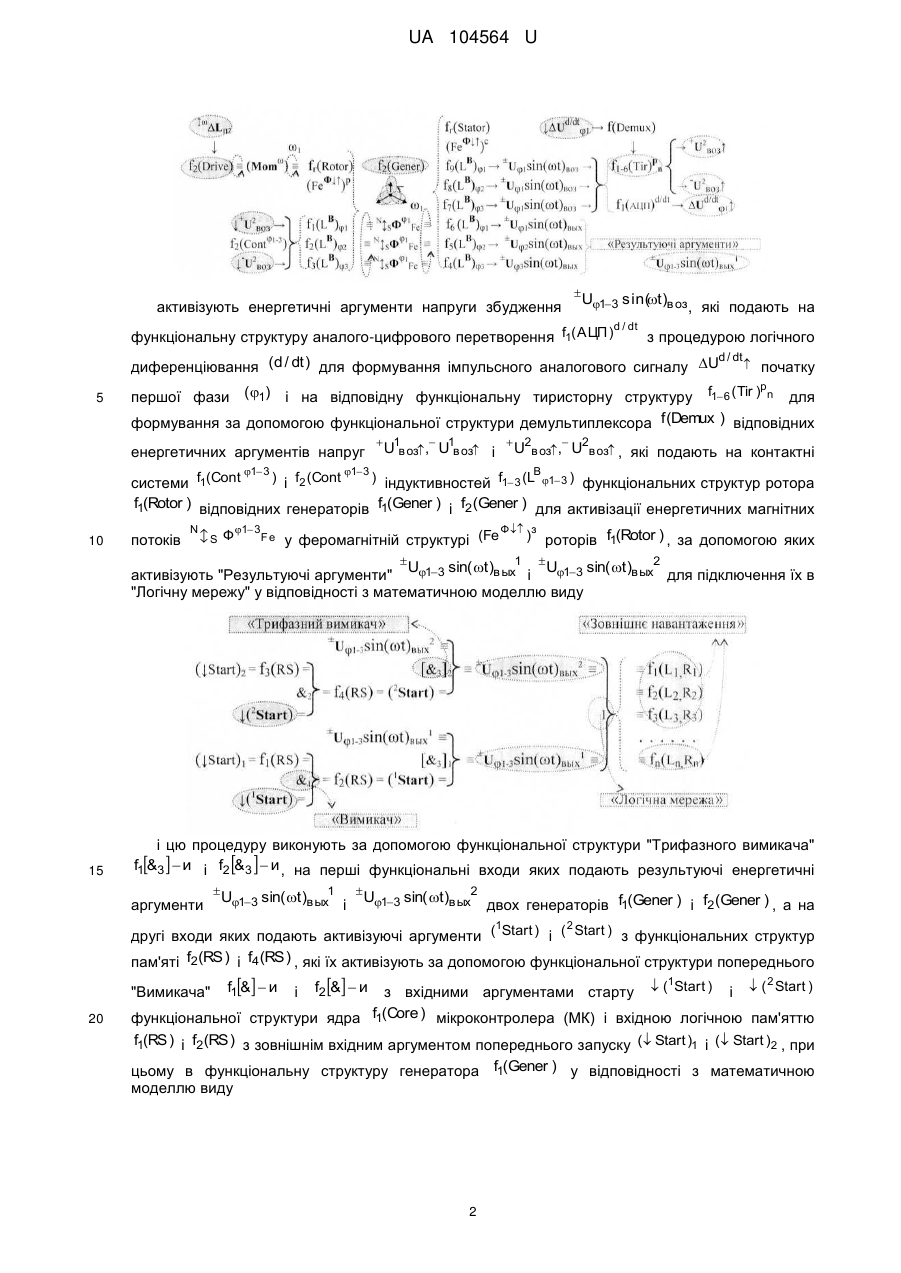
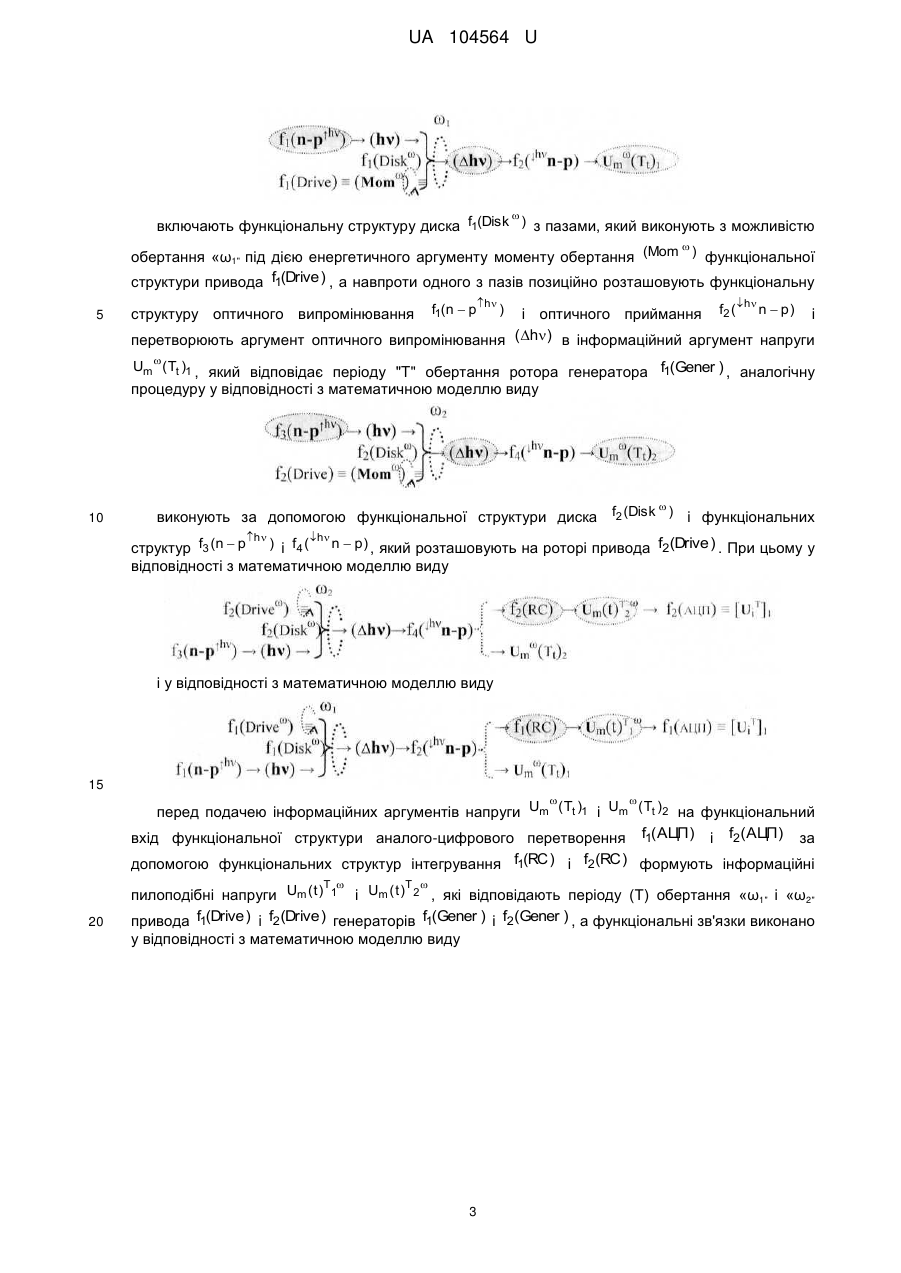
Реферат: Спосіб лазерного контролю обертів ″ω1″ і ″ω2″ приводів f1(Drive ) і f2 (Drive ) генераторів f1(GenerU1 3 ) і f2 (GenerU1 3 ) при підключенні їх до загального зовнішнього навантаження fn (Lн, Rн ) , в якому у відповідності з математичною моделлю. Інформаційні диски (1Disk Inform ) і ( 2 Disk Inform ) для активізації інформаційних аргументів про поточний стан періоду ″T″ обертів ″ω1″ і ″ω2″ приводів f1(Drive ) і f2 (Drive ) виконують у відповідності з математичною моделлю за допомогою лазерних дисків f1(Laser Disk Inform ) і f2 (Laser Disk Inform ) з використанням оптичних систем зчитування f1(Opticalsystem read) інформаційних аргументів Laser f2 (Opticalsystem read) і U j T Re al Drive1 і Laser U j T Re al Drive 2 для активізації реальних в поточний момент часу для подачі їх у відповідний порт функціональної структури ядра f1(Core) мікроконтролера (МК), а функціональні зв'язки функціональної структури лазерного контролю обертів ″ω1″ і ″ω2″ приводів f1(Drive ) і f2 (Drive ) генераторів f1(GenerU1 3 ) і f2 (GenerU1 3 ) виконуються у відповідності з математичною моделлю. UA 104564 U (12) UA 104564 U UA 104564 U 5 10 15 20 Корисна модель належить до галузі електроенергетики, а саме до методу оптичного контролю періоду обертання роторів електричних машин, і може бути використана для управління генераторами різної потужності, які підключені до загального навантаження, для забезпечення розподілу активного навантаження між ними пропорційно до їх потужностей. Відома функціональна структура розподілу активної потужності між генераторами (Веретенников Л.П. Исследование процессов в судовых электроэнергетических системах. Теория и методы. - П.: "Судостроение", 1975. стр.120), яка встановлюється на кожному з паралельно працюючих генераторів. За допомогою датчиків активного струму вимірюються та порівнюються між собою активні струми генераторів. Потім сигнал підсилюється і подається на серводвигуни які впливають на механізм зміни уставки по частоті обертання. Різниця напруг зменшується до мінімуму. При будь-якій неузгодженості навантаження, яка перевищує межу чутливості пристрою, серводвигуни починають обертатися, змінюючи положення характеристик паралельно працюючих генераторів так, щоб при заданому навантажені вони з'єднались в одній точці, яка відповідає частоті напруги на шинах і заданій потужності навантаження. Точність може бути отримана в межах 5 % від номінальної потужності генератора, якщо сигнали управління розподіленням потужності формувати безпосередньо в генераторі. Відомо також про спосіб контролю і коригування обертів «ω1" і «ω2" приводів f1(Drive ) і f2(Drive ) генераторів f1(Gener ) і f2 (Gener ) при підключенні їх до загального зовнішнього навантаження fn (Lн,Rн ) (див. Патент UA № 93503), в якому у відповідності з математичною моделлю виду за допомогою функціональних структур аналого-цифрового перетворення f1( АЦП ) і f2 ( АЦП ) Uj этал виконують перетворення інформаційних з вихідною структурою еталонної напруги аргументів напруги Um (Tt )1 і Um (Tt )2 в інформаційну цифрову структуру аналогових T 25 T сигналів Ui 1 | і Ui 2 , які подають на вхідний порт f1(Port ) і f2 (Port ) функціональної структури ядра f1(Core ) мікроконтролера (МК), а на вхідний порт f3 (Port ) його подають структуру U jT аналогових напруг , яка відповідає інформаційному змісту періоду "T" обертів «ω1" і «ω2" приводів f1(Drive ) і f2(Drive ) для контролю і коригування за допомогою функціональних структур крокових двигунів f1( шд ) і f1( шд ) , які активізують аргументи 30 положення планки регулятора обертів «ω1" відповідності з математичною моделлю виду Lп1 і Lп1 позиційного ротора генератора f1(Gener ) і f2 (Gener ) , які у і у відповідності з математичною моделлю виду 1 UA 104564 U активізують енергетичні аргументи напруги збудження U13 sin( t)воз d / dt функціональну структуру аналого-цифрового перетворення f1( АЦП ) , які подають на з процедурою логічного d / dt початку диференціювання (d / dt ) для формування імпульсного аналогового сигналу U 5 p першої фази ( 1) і на відповідну функціональну тиристорну структуру f1 6 (Tir ) n для формування за допомогою функціональної структури демультиплексора f (Demux ) відповідних енергетичних аргументів напруг 13 1 U в оз, U1в оз 13 і 2 U в оз, U2в оз , які подають на контактні B ) і f2 (Cont ) індуктивностей f13 (L 13 ) функціональних структур ротора системи f1(Cont f1(Rotor ) відповідних генераторів f1(Gener ) і f2 (Gener ) для активізації енергетичних магнітних 10 потоків N S Ф13Fe у феромагнітній структурі (Fe Ф )з роторів f1(Rotor ) , за допомогою яких U13 sin( t )в ых1 U13 sin( t )вых2 активізують "Результуючі аргументи" і для підключення їх в "Логічну мережу" у відповідності з математичною моделлю виду 15 і цю процедуру виконують за допомогою функціональної структури "Трифазного вимикача" f1&3 и і f2 &3 и , на перші функціональні входи яких подають результуючі енергетичні аргументи U13 sin( t )в ых1 і U13 sin( t )вых2 двох генераторів f1(Gener ) і f2 (Gener ) , а на 2 1 другі входи яких подають активізуючі аргументи ( Start ) і ( Start ) з функціональних структур пам'яті f2 (RS ) і f4 (RS ) , які їх активізують за допомогою функціональної структури попереднього 20 f1& и f2 & и 1 2 з вхідними аргументами старту ( Start ) і ( Start ) функціональної структури ядра f1(Core ) мікроконтролера (МК) і вхідною логічною пам'яттю f1(RS ) і f2 (RS ) з зовнішнім вхідним аргументом попереднього запуску ( Start )1 і ( Start )2 , при "Вимикача" і цьому в функціональну структуру генератора f1(Gener ) у відповідності з математичною моделлю виду 2 UA 104564 U включають функціональну структуру диска f1(Disk ) з пазами, який виконують з можливістю обертання «ω1" під дією енергетичного аргументу моменту обертання (Mom ) функціональної структури привода f1(Drive ) , а навпроти одного з пазів позиційно розташовують функціональну 5 h і оптичного приймання f2 ( n p ) і перетворюють аргумент оптичного випромінювання ( h ) в інформаційний аргумент напруги структуру оптичного випромінювання f1(n ph ) Um (Tt )1 , який відповідає періоду "T" обертання ротора генератора f1(Gener ) , аналогічну процедуру у відповідності з математичною моделлю виду 10 виконують за допомогою функціональної структури диска f2 (Disk ) і функціональних h ) і f4 (h n p ) , який розташовують на роторі привода f2(Drive ) . При цьому у структур f3 (n p відповідності з математичною моделлю виду і у відповідності з математичною моделлю виду 15 перед подачею інформаційних аргументів напруги Um (Tt )1 і Um ( Tt )2 на функціональний вхід функціональної структури аналого-цифрового перетворення f1( АЦП ) і f2 ( АЦП ) за допомогою функціональних структур інтегрування f1(RC ) і f2 (RC ) формують інформаційні 20 T T пилоподібні напруги Um ( t ) 1 і Um ( t ) 2 , які відповідають періоду (Т) обертання «ω1" і «ω2" привода f1(Drive ) i f2(Drive ) генераторів f1(Gener ) і f2 (Gener ) , а функціональні зв'язки виконано у відповідності з математичною моделлю виду 3 UA 104564 U Недоліком відомого способу є технологічна похибка, яка виникає в результаті формування оптичних інформаційних сигналів ( h ) на виході функціональних структур оптичних дисків 5 f1(Disk ) і f1(Disk ) з пазами. Задачею корисної моделі є вдосконалення оптичного контролю обертів «ω1" і «ω2" приводів f1(Drive ) і f2 (Drive ) генераторів f1(Gener U13 ) і f2 (Gener U13 ) при підключенні їх до загального зовнішнього навантаження fn (Lн,Rн ) . Поставлена задача вирішується тим, що: Спосіб лазерного контролю обертів «ω1" і «ω2" приводів f1(Drive ) і f2 (Drive ) генераторів 10 f1(Gener U13 ) і f2 (Gener U13 ) при підключенні їх до загального зовнішнього навантаження fn (Lн,Rн ) , в якому у відповідності з математичною моделлю виду на вхідний порт f1(Port ) і f2 (Port ) функціональної структури ядра f1(Core ) мікроконтролера (МК) 15 подають UjTRe alDriv e2 структури ( аргументів 1 UjTRealDriv e ,2 аналогових сигналів напруги ) , які відповідають реальному періоду 1 UjTRe alDriv e і (T) обертання () функціональної структури двох приводів f1,2 (Drive ) , а на його вхідний порт f3 (Port ) подають структуру аналогових сигналів напруг U , яка відповідає стандартному (Standard) T S tan dard Driv e j інформаційному змісту періоду "T" обертів «ω1" і «ω2" приводів f1(Drive ) і f2 (Drive ) для подальшої активізації на виході функціональної структури ядра f1(Core ) мікроконтролера (МК) 4 UA 104564 U аргументів зміни (Change 1) і (Change 2 ) обертів «ω1" і «ω2" роторів першого і другого приводів f1(Drive ) і f2 (Drive ) , але цю процедуру виконують після подачі попередніх аргументів Pr edv or (Start 1Rotor ) і Pr edv or(Start 2Rotor ) старту ротора відповідного приводу і їх подають на входи портів f4 (Port ) і f5 (Port ) функціональної структури ядра f1(Core ) мікроконтролера (МК) 5 1 2 для активізації аргументів (Start Rotor ) і (Start Rotor ) на виході функціональної структури ядра f1(Core ) мікроконтролера (МК) для підключення у відповідності з математичною моделлю виду за допомогою "Трифазних вимикачів" f1(Gener U13 ) 10 f2 (Gener U13 ) і U13 sin( t )в ых2 & 1 3 Gener енергетичних 1 і & 1 3 аргументів Gener 2 з виходів генераторів напруги U13 sin( t )в ых1 і в "Логічну мережу" зовнішнього навантаження fn (Ln,Rn ) , при цьому аргументи зміни (Change 1) і (Change 2 ) обертів «ω1" і «ω2" роторів першого і другого приводів f1(Drive ) і f2 (Drive ) з виходу функціональної структури ядра f1(Core ) мікроконтролера (МК) подають у відповідності з математичною моделлю виду 15 і у відповідності з математичною моделлю виду driv e ) і f2 (Discret driv e) для на вхід функціональної структури дискретних приводів f1(Discret зміни обертів «ω1" і «ω2" роторів першого і другого приводів f1(Drive ) і f2 (Drive ) перед підключенням їх до зовнішнього навантаження fn (Lн,Rн ) , при цьому ротори приводів f1(Drive ) і 20 f2 (Drive ) функціонально з'єднують з інформаційними дисками (1Disk Inf orm) і ( 2 Disk Inf orm) для активізації інформаційних аргументів про поточний стан періоду "T" обертів «ω1" і «ω2" приводів f1(Drive ) U13 sin( t )в ых1 і і f2 (Drive ) перед U13 sin( t )вых2 і після підключення енергетичних до зовнішнього навантаження аргументів fn (Ln,Rn ) , в якому 1 2 інформаційні диски ( Disk Inf orm) і ( Disk Inf orm) для активізації інформаційних аргументів про 5 UA 104564 U поточний стан періоду "T" обертів «ω1" і «ω2" приводів f1(Drive ) і f2 (Drive ) виконують у відповідності з математичною моделлю виду і у відповідності з математичною моделлю виду 5 Laser Disk Inf orm) і f2 (Laser Disk Inf orm) з використанням за допомогою лазерних дисків f1( sy stem read) і f2 (Optical sy stem read ) для активізації реальних оптичних систем зчитування f1(Optical інформаційних аргументів 10 Laser U і T Re al 1 Driv e j Laser U T Re al 2 Driv e j в поточний момент часу для подачі їх у відповідний порт функціональної структури ядра f1(Core ) мікроконтролера (МК), а функціональні зв'язки функціональної структури лазерного контролю обертів «ω1" і «ω2" приводів f1(Drive ) і f2 (Drive ) генераторів f1(Gener U13 ) і f2 (Gener U13 ) виконуються у відповідності з математичною моделлю виду Використання запропонованої функціональної структури лазерного контролю енергетичних 15 аргументів напруги f1(Gener U13 ) Uв ых sin( t 1), Uв ых sin( t 2 ) і Uв ых sin( t 3 ) генераторів і f2 (Gener ) при підключенні їх до загального зовнішнього навантаження fn (Lн,Rн ) дозволить виключити технологічну похибку і підвищити економічність на 2-3 %. 6 UA 104564 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб лазерного контролю обертів ″ω1″ і ″ω2″ приводів f1(Drive ) і f2 (Drive ) генераторів f1(GenerU1 3 ) і f2 (GenerU1 3 ) при підключенні їх до загального зовнішнього навантаження 5 fn (Lн, Rн ) , в якому у відповідності з математичною моделлю виду на вхідний порт f1(Port) і f2 (Port) функціональної структури ядра f1(Core) мікроконтролера (МК) подають структури аргументів аналогових сигналів напруги U j T Re al Drive1 і ( U j 10 T Re al ) , які відповідають реальному періоду 1, 2 Drive Uj T Re al 2 Drive (T) обертання () функціональної структури двох приводів f1,2 (Drive ) , а на його вхідний порт f3 (Port) подають структуру аналогових сигналів U напруг T S tan dard Drive j , яка відповідає стандартному (Standard) інформаційному змісту періоду ″T″ обертів ″ω1″ і ″ω2″приводів f1(Drive ) і f2 (Drive ) для подальшої активізації на виході функціональної структури ядра f1(Core) мікроконтролера (МК) аргументів зміни (Change1) і (Change2 ) обертів ″ω1″ і ″ω2″ роторів першого і другого приводів 15 f1(Drive ) Pr edvor і f2 (Drive ) , але цю процедуру виконують після подачі попередніх аргументів (Start1Rotor ) і Pr edvor (Start 2Rotor ) старту ротора відповідного приводу і їх подають на входи портів f4 (Port) і f5 (Port) функціональної структури ядра f1(Core) мікроконтролера (МК) для активізації аргументів (Start1Rotor ) і (Start 2Rotor ) на виході функціональної структури ядра f1(Core) мікроконтролера (МК) для підключення у відповідності з математичною моделлю виду 20 за допомогою U f1(Gener U і f2 (Gener вимикачів″ 1 3 ) & 1 3 Gener енергетичних 1 і & 1 3 Gener аргументів U13 sin(t )вих в ″Логічну мережу″ зовнішнього навантаження зміни 25 1 3 ) ″Трифазних 2 (Change1) і (Change 2) 2 з напруги виходів генераторів U13 sin(t )вих 1 і fn (Ln, Rn ) , при цьому аргументи обертів ″ω1″ і ″ω2″ роторів першого і другого приводів f1(Drive ) і f2 (Drive ) з виходу функціональної структури ядра f1(Core) мікроконтролера (МК) подають у відповідності з математичною моделлю виду 7 UA 104564 U і у відповідності з математичною моделлю виду на вхід функціональної структури дискретних приводів f1(Discret drive ) і f2 (Discret drive ) для зміни 5 обертів ″ω1″ і ″ω2″ роторів першого і другого приводів f1(Drive ) і f2 (Drive ) перед підключенням їх до зовнішнього навантаження fn (Lн, Rн ) , при цьому ротори приводів f1(Drive ) і f2 (Drive ) функціонально з'єднують з інформаційними дисками (1Disk Inform ) і ( 2 Disk Inform ) для активізації інформаційних аргументів про поточний стан періоду ″T″ обертів ″ω1″ і ″ω2″ приводів f1(Drive ) і f2 (Drive ) 10 перед U13 sin(t )вих 2 і після підключення енергетичних до зовнішнього навантаження Disk Inform ) 1 інформаційні диски ( і ( 2 Disk Inform ) аргументів U13 sin(t )вих 1 і fn (Ln, Rn ) , який відрізняється тим, що для активізації інформаційних аргументів про поточний стан періоду ″T″ обертів ″ω1″ і ″ω2″ приводів f1(Drive ) і f2 (Drive ) виконують у відповідності з математичною моделлю виду 15 і у відповідності з математичною моделлю виду за допомогою лазерних дисків f1(Laser Disk Inform ) і f2 (Laser Disk Inform ) з використанням оптичних систем зчитування f1(Opticalsystem read) інформаційних аргументів 20 Laser f2 (Opticalsystem read) і U j T Re al Drive1 і Laser U j T Re al Drive 2 для активізації реальних в поточний момент часу для подачі їх у відповідний порт функціональної структури ядра f1(Core) мікроконтролера (МК), а функціональні зв'язки функціональної структури лазерного контролю обертів ″ω1″ і ″ω2″ приводів f1(Drive ) і f2 (Drive ) генераторів f1(GenerU1 3 ) і f2 (GenerU1 3 ) виконуються у відповідності з математичною моделлю виду 8 UA 104564 U . Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Автори англійськоюRiabenkyi Volodymyr Mykhailovych, Ushkarenko Oleksandr Olehovych
Автори російськоюРябенький Владимир Михайлович, Ушкаренко Александр Олегович
МПК / Мітки
МПК: H02M 1/08
Мітки: f2(generuw1-3, контролю, спосіб, f1(drivew, генераторів, підключенні, f2(drivew, зовнішнього, приводів, обертів, загального, fn(lh,rh, лазерного, навантаження, f1(generuw1-3
Код посилання
<a href="https://ua.patents.su/11-104564-sposib-lazernogo-kontrolyu-obertiv-w1-i-w2-privodiv-f1drivew-i-f2drivew-generatoriv-f1generuw1-3-i-f2generuw1-3-pri-pidklyuchenni-kh-do-zagalnogo-zovnishnogo-navantazhennya-fnlhrh.html" target="_blank" rel="follow" title="База патентів України">Спосіб лазерного контролю обертів “w1″ і “w2″ приводів f1(drivew) і f2(drivew) генераторів f1(generuw1-3) і f2(generuw1-3) при підключенні їх до загального зовнішнього навантаження fn(lh,rh)</a>
Спосіб контролю та коригування обертів “w1″ та “w2″ приводів f1(drive) та f2(drive) генераторів f1(gener) та f2(gener) при підключенні їх до загального зовнішнього навантаження fn(lh, rh)
Номер патенту: 93503
Опубліковано: 10.10.2014
Автор: Ушкаренко Олександр Олегович
МПК: H02M 1/08
Мітки: f2(gener, навантаження, коригування, обертів, загального, f1(drive, генераторів, приводів, f2(drive, fn(lh, зовнішнього, f1(gener, контролю, спосіб, підключенні
Формула / Реферат:
Спосіб контролю та коригування обертів "" та "" приводу та генераторів та
Функціональна структура пристрою контролю та коригування енергетичних аргументів напруг ±uвихsin(wt+j1), ±uвихsin(wt+j2) та ±uвихsin(wt+j3) генераторів f1(gener) та f2(gener) при підключенні їх до загального зовнішнього навантаження fn(lh,rh)
Номер патенту: 94824
Опубліковано: 10.12.2014
Автори: Ушкаренко Олександр Олегович, Рябенький Володимир Михайлович, Фокічева Марина Вікторівна, Зайченко Євген Олександрович
МПК: H02M 1/08
Мітки: f2(gener, контролю, коригування, навантаження, ±uвихsin(wt+j2, функціональна, ±uвихsin(wt+j3, напруг, f1(gener, підключенні, аргументів, пристрою, енергетичних, ±uвихsin(wt+j1, fn(lh,rh, зовнішнього, генераторів, структура, загального
Формула / Реферат:
Функціональна структура пристрою контролю та коригування енергетичних аргументів напруг , та генераторів та
Функціональна структура контролю та коригування енергетичних аргументів напруг ±uвихsin(wt+j1), ±uвихsin(wt+j2) та ±uвихsin(wt+j3) генераторів f1(gener) та f2(gener) при підключенні їх до загального зовнішнього навантаження fn(lh,rh)
Номер патенту: 88532
Опубліковано: 25.03.2014
Автори: Дорогань Ольга Ігорівна, Кожущенко Альона Андріївна, Рябенький Володимир Михайлович, Ушкаренко Олександр Олегович, Воскобоєнко Віктор Іванович, Мішустов Владислав Павлович
МПК: H02M 1/08
Мітки: енергетичних, контролю, ±uвихsin(wt+j3, генераторів, напруг, ±uвихsin(wt+j1, навантаження, f1(gener, f2(gener, загального, коригування, зовнішнього, структура, ±uвихsin(wt+j2, fn(lh,rh, підключенні, функціональна, аргументів
Формула / Реферат:
Функціональна структура контролю та коригування енергетичних аргументів напруг ±Uвихsin(wt+j1), ±Uвихsin(wt+j2) та ±Uвихsin(wt+j3) генераторів f1(Gener) та f2(Gener) при підключенні їх до загального зовнішнього навантаження fn(LH, RH), що включає, відповідно до математичної моделі вигляду,функціональну структуру генератора f1(Gener), де ↕w∆Lп1...
Пристрій підключення основного і додаткового генераторів до загального навантаження і розподілу активної потужності між ними
Номер патенту: 42829
Опубліковано: 27.07.2009
Автори: Рябенький Володимир Михайлович, Ключко Артем Сергійович, Ушкаренко Олександр Олегович, Петренко Лев Петрович
МПК: H02M 1/08
Мітки: додаткового, підключення, пристрій, навантаження, ними, загального, активної, генераторів, основного, розподілу, потужності
Формула / Реферат:
Пристрій підключення основного і додаткового генераторів до загального навантаження і розподілу активної потужності між ними, який містить основний і додатковий генератори, виходи яких за допомогою вимикачів підключені до шин загального навантаження, при цьому кожен з генераторів функціонально зв'язаний віссю з первинним двигуном відповідно з індивідуальною уставкою для зміни потужності основного і додаткового генераторів, на осях обертання...
Спосіб навантаження генераторів постійного струму незалежного збудження і пристрій для реалізації способу
Номер патенту: 49281
Опубліковано: 16.09.2002
Автори: Чорний Олексій Петрович, Кривонос Сергій Анатолійович, Родькін Дмитро Йосипович, Бялобржеський Олексій Володимирович, Величко Тетяна Володимирівна
МПК: G01R 31/24
Мітки: постійного, реалізації, струму, генераторів, незалежного, пристрій, способу, навантаження, збудження, спосіб
Формула / Реферат:
1. Спосіб навантаження генератора постійного струму незалежного збудження, який полягає в тому, що якір електричної машини підключають до керованого силового перетворювача через датчик струму якоря і датчик напруги, обмотку збудження підключають до збудника через датчик струму збудження і напруги збудження, контролюють параметри режиму навантаження, струм якоря, струм збудження, напругу якоря, напругу збудження, швидкість обертання, який...
Попередній патент: Мазь з екстрактом деревію звичайного, яка проявляє ранозагоювальні властивості
Випадковий патент: Трубне різьбове з'єднання