Система та спосіб спільного використання даних
Формула / Реферат
1. Система спільного використання даних навігаційними пристроями рухомих сільськогосподарських машин, яка включає:
центральний сервер, що має:
модуль зв’язку для прийому вхідних навігаційних даних та передачі вихідних навігаційних даних; та
сховище для зберігання вхідних навігаційних даних;
перший навігаційний пристрій першої сільськогосподарської машини, котрий має модуль зв’язку для бездротової передачі вхідних навігаційних даних до центрального сервера, перші навігаційні дані включають дані щодо зони, охопленої першою сільськогосподарською машиною під час роботи; та
другий навігаційний пристрій другої сільськогосподарської машини, котрий має модуль зв’язку для бездротового прийому вихідних навігаційних даних з центрального сервера;
причому центральний сервер налаштовано так, що принаймні частина вихідних навігаційних даних, переданих до другого навігаційного пристрою, включає дані, обчислені сервером з використанням принаймні частини вхідних навігаційних даних, отриманих від першого навігаційного пристрою, що зберігаються у сховищі центрального сервера.
2. Система за п. 1, в якій модуль зв’язку першого навігаційного пристрою включає стільниковий модем, і модуль зв’язку другого навігаційного пристрою включає стільниковий модем.
3. Система за п. 1 або п. 2, в якій модуль зв’язку першого навігаційного пристрою та модуль зв’язку другого навігаційного пристрою кожен налаштовані як на передачу вхідних навігаційних даних, так і на прийом вихідних навігаційних даних.
4. Система за будь-яким з попередніх пунктів, в якій вихідні навігаційні дані включають дані охоплення площі, охопленої сільськогосподарськими машинами, іншими ніж сільськогосподарська машина, до якої передаються вихідні навігаційні дані.
5. Система за будь-яким з попередніх пунктів, в якій кожен з першого навігаційного пристрою та другого навігаційного пристрою включає картографічно-демонстраційний модуль, картографічно-демонстраційний модуль здатен записувати та демонструвати дані охоплення щодо площі, охопленої сільськогосподарською машиною, в якій розташований відповідний навігаційний пристрій, і здатен демонструвати дані охоплення сільськогосподарських машин, інших ніж сільськогосподарська машина, в якій розташований навігаційний пристрій, дані охоплення сільськогосподарських машин, інших ніж сільськогосподарська машина, в якій розташований навігаційний пристрій, приймаються навігаційним пристроєм як вихідні навігаційні дані.
6. Система за будь-яким з попередніх пунктів, в якій модуль зв’язку першого навігаційного пристрою та модуль зв’язку другого навігаційного пристрою кожен мають унікальну мережеву адресу для однозначної ідентифікації відповідно першого навігаційного пристрою та другого навігаційного пристрою.
7. Система за будь-яким з попередніх пунктів, в якій кожен з першого навігаційного пристрою та другого навігаційного пристрою включає модуль позиціонування, модуль позиціонування налаштований на відслідковування положення відповідних навігаційних пристроїв для обчислення даних положення, що використовуються в обчисленні даних охоплення.
8. Система за п. 7, в якій модуль позиціонування є переважно у вигляді пристрою Глобальної Навігаційної Супутникової Системи.
9. Система за п. 7 або п. 8, в якій кожен з першого навігаційного пристрою та другого навігаційного пристрою включає модуль моделювання машини для моделювання площі, яку займає сільськогосподарська машина, в якій розташований навігаційний пристрій, перший навігаційний пристрій та другий навігаційний пристрій здатні обчислювати дані охоплення з використанням площі, яку займає сільськогосподарська машина, в якій розташований навігаційний пристрій, та даних зміни положення сільськогосподарської машини.
10. Система за будь-яким з попередніх пунктів, в якій центральний сервер налаштований для доступу з персонального комп’ютера через мережу.
11. Система за п. 10, в якій центральний сервер налаштований для одержання інструкцій, направлених до одного з першого навігаційного пристрою чи другого навігаційного пристрою з персонального комп’ютера, і здатен передавати інструкції як вихідні навігаційні дані до одного з першого навігаційного пристрою чи другого навігаційного пристрою.
12. Система за п. 10 або п. 11, в якій центральний сервер здатен зберігати цифрову карту ділянки, що оновлюється вхідними навігаційними даними з навігаційних пристроїв, і цифрова карта ділянки доступна для перегляду з персонального комп’ютера.
13. Система за п. 12, в якій вхідні навігаційні дані включають дані положення першої сільськогосподарської машини, а центральний сервер здатен записувати положення першої сільськогосподарської машини на цифровій карті ділянки.
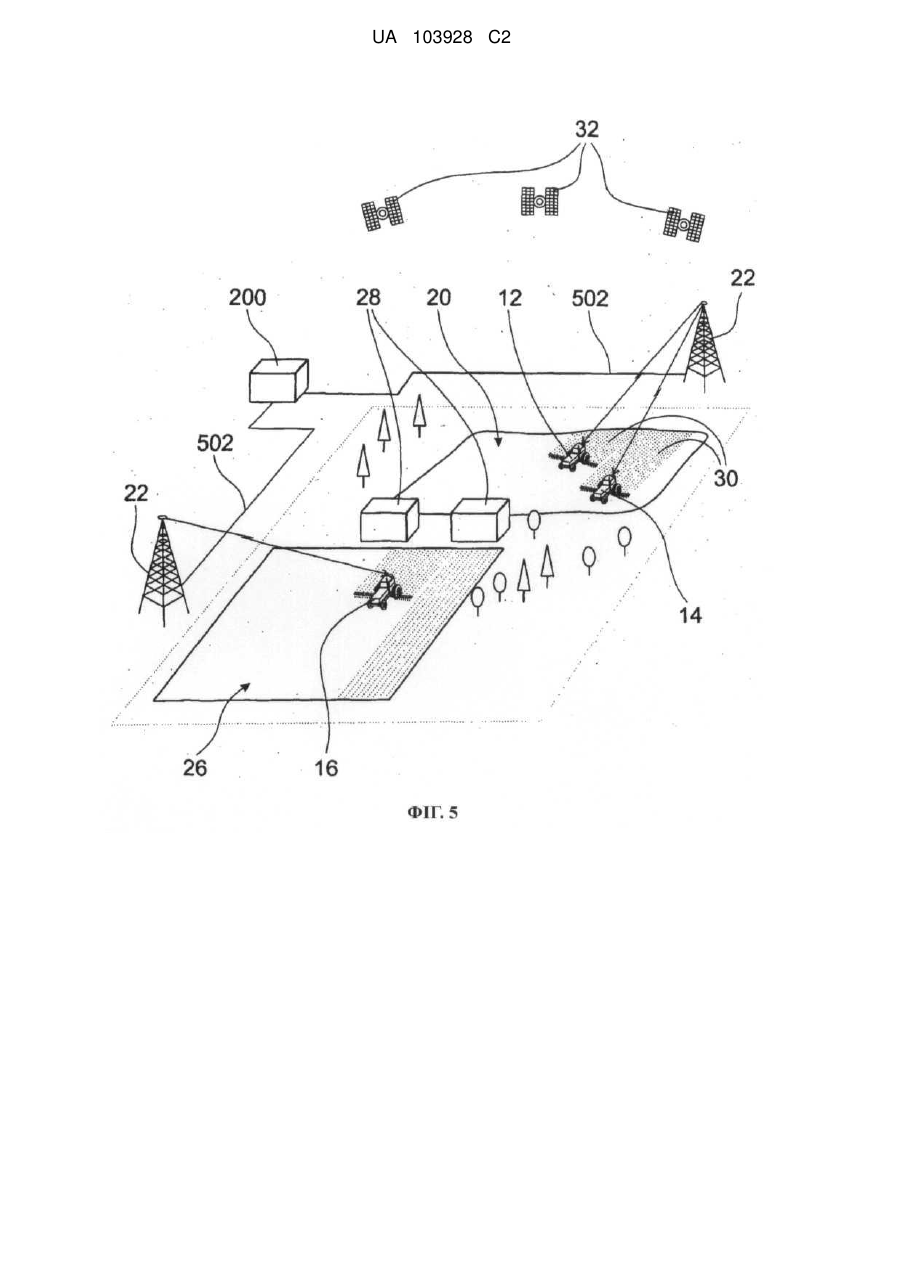
14. Центральний сервер, який забезпечує спільне використання даних навігаційними пристроями, встановленими на рухомих сільськогосподарських машинах, центральний сервер має:
модуль зв’язку, сполучений з мережею бездротового зв’язку для прийому вхідних навігаційних даних від першого навігаційного пристрою першої сільськогосподарської машини та для передачі вихідних навігаційних даних до другого навігаційного пристрою другої сільськогосподарської машини через мережу бездротового зв’язку;
сховище для зберігання вхідних навігаційних даних, включаючи дані охоплення щодо площі, охопленої першою сільськогосподарською машиною під час роботи;
причому центральний сервер налаштовано так, що принаймні частина вихідних навігаційних даних, переданих до другого навігаційного пристрою, включає дані, обчислені центральним сервером з використанням принаймні частини даних охоплення, що зберігаються у сховищі центрального сервера.
15. Центральний сервер за п. 14, де центральний сервер налаштований для доступу з персонального комп’ютера через мережу.
16. Центральний сервер за п. 15, де центральний сервер налаштований для одержання інструкцій, направлених до одного з першого навігаційного пристрою чи другого навігаційного пристрою з персонального комп’ютера, і здатен передавати інструкції як вихідні навігаційні дані до одного з першого навігаційного пристрою чи другого навігаційного пристрою.
17. Центральний сервер за п. 15 або п. 16, де центральний сервер здатен зберігати цифрову карту ділянки, що оновлюється вхідними навігаційними даними з навігаційних пристроїв, і цифрова карта ділянки доступна для перегляду з персонального комп’ютера.
18. Центральний сервер за п. 17, де центральний сервер пристосований до оновлення цифрової карти ділянки даними охоплення з вхідних навігаційних даних, отриманих з навігаційних пристроїв.
19. Навігаційний пристрій для сільськогосподарської машини, який включає:
модуль позиціонування, налаштований на відслідковування положення сільськогосподарської машини;
модуль моделювання машини, здатний моделювати площу, яку займає сільськогосподарська машина під час роботи;
картографічно-демонстраційний модуль, здатний записувати дані охоплення зони, охопленої сільськогосподарською машиною під час роботи, та зберігати дані охоплення інших сільськогосподарських машин; та
модуль зв’язку, пристосований для бездротової передачі вхідних навігаційних даних, включаючи дані щодо зони, охопленої сільськогосподарською машиною під час роботи, до центрального сервера, віддаленого від сільськогосподарської машини, модуль зв’язку пристосований для прийому вихідних навігаційних даних, включаючи дані щодо зон охоплення інших сільськогосподарських машин, від центрального сервера.
20. Навігаційний пристрій за п. 19, в якому модуль зв’язку включає стільниковий модем для бездротового зв’язку з центральним сервером.
21. Навігаційний пристрій за п. 19 або п. 20, в якому модуль зв’язку навігаційного пристрою має унікальний ідентифікатор для однозначної ідентифікації навігаційного пристрою на центральному сервері.
22. Навігаційний пристрій за будь-яким з пп. 19-21, в якому картографічно-демонстраційний модуль здатен демонструвати дані охоплення щодо площі, охопленої сільськогосподарською машиною, в якій розташований навігаційний пристрій, і здатен демонструвати дані охоплення інших сільськогосподарських машин.
23. Навігаційний пристрій за будь-яким з пп. 19-22, в якому картографічно-демонстраційний модуль пристосований для орієнтування сільськогосподарської машини відносно площі, охопленої іншими сільськогосподарськими машинами.
24. Навігаційний пристрій за п. 23, в якому картографічно-демонстраційний модуль пристосований для ведення сільськогосподарської машини без перекривання з площею, охопленою іншими сільськогосподарськими машинами.
25. Навігаційний пристрій за будь-яким з пп. 19-24, в якому навігаційний пристрій здатен автоматично керувати робочим обладнанням сільськогосподарської машини, щоб воно не працювало над зоною, вже охопленою іншими сільськогосподарськими машинами.
26. Спосіб спільного використання навігаційних даних рухомими сільськогосподарськими машинами, який включає:
бездротову передачу вхідних навігаційних даних від першого навігаційного пристрою першої сільськогосподарської машини до центрального сервера, вхідні навігаційні дані включають дані щодо зони, охопленої першою сільськогосподарською машиною під час роботи;
прийом вхідних навігаційних даних на центральному сервері;
обчислення вихідних навігаційних даних на центральному сервері з використанням принаймні частини вхідних навігаційних даних, отриманих від першого навігаційного пристрою;
бездротову передачу вихідних навігаційних даних від сервера до другого навігаційного пристрою другої сільськогосподарської машини; та
бездротовий прийом вихідних навігаційних даних на другому навігаційному пристрої.
27. Спосіб за п. 26, який включає:
бездротову передачу другим навігаційним пристроєм вхідних навігаційних даних, включаючи дані охоплення щодо площі, охопленої другою сільськогосподарською машиною під час роботи, від другого навігаційного пристрою до центрального сервера; та
бездротовий прийом першим навігаційним пристроєм вихідних навігаційних даних, обчислених центральним сервером з принаймні частини вхідних навігаційних даних, прийнятих на центральному сервері від другого навігаційного пристрою.
28. Спосіб за п. 26 або п. 27, що включає ідентифікацію першого навігаційного пристрою та другого навігаційного пристрою на центральному сервері за унікальною мережевою адресою кожного з першогонавігаційного пристрою та другого навігаційного пристрою.
29. Спосіб за будь-яким з пп. 26-28, який включає:
моделювання площі, яку займає перша сільськогосподарська машина; та
обчислення даних охоплення першої сільськогосподарської машини під час роботи з використанням даних зміни положення першої сільськогосподарської машини та площі, яку займає перша сільськогосподарська машина.
30. Спосіб за будь-яким з пп. 26-29, який включає зберігання цифрової карти ділянки на центральному сервері та оновлення цифрової карти ділянки вхідними навігаційними даними.
31. Спосіб ведення сільськогосподарських машин для запобігання перекривання зон, оброблюваних сільськогосподарськими машинами, який включає:
спільне використання навігаційних даних рухомими сільськогосподарськими машинами як визначено в будь-якому з пп. 26-30; та
ведення другої сільськогосподарської машини з використанням вихідних навігаційних даних для неперекривання під час роботи з зоною, охопленою першою сільськогосподарською машиною під час роботи.
32. Спосіб ведення сільськогосподарських машин за п. 31, в якому ведення другої сільськогосподарської машини включає керування робочим устаткуванням сільськогосподарської машини, щоб воно не працювало над площами, вже охопленими першою сільськогосподарською машиною, коли робоче устаткування проходить над площею, вже охопленою першою сільськогосподарською машиною.
33. Спосіб ведення сільськогосподарських машин за п. 31 або п.32, в якому спосіб включає:
демонстрацію даних охоплення щодо площі, охопленої сільськогосподарською машиною, в якій знаходиться відповідний навігаційний пристрій, на дисплеї; та
демонстрацію даних охоплення сільськогосподарськими машинами, іншими ніж сільськогосподарська машина, в якій знаходиться відповідний навігаційний пристрій, на дисплеї.
Текст
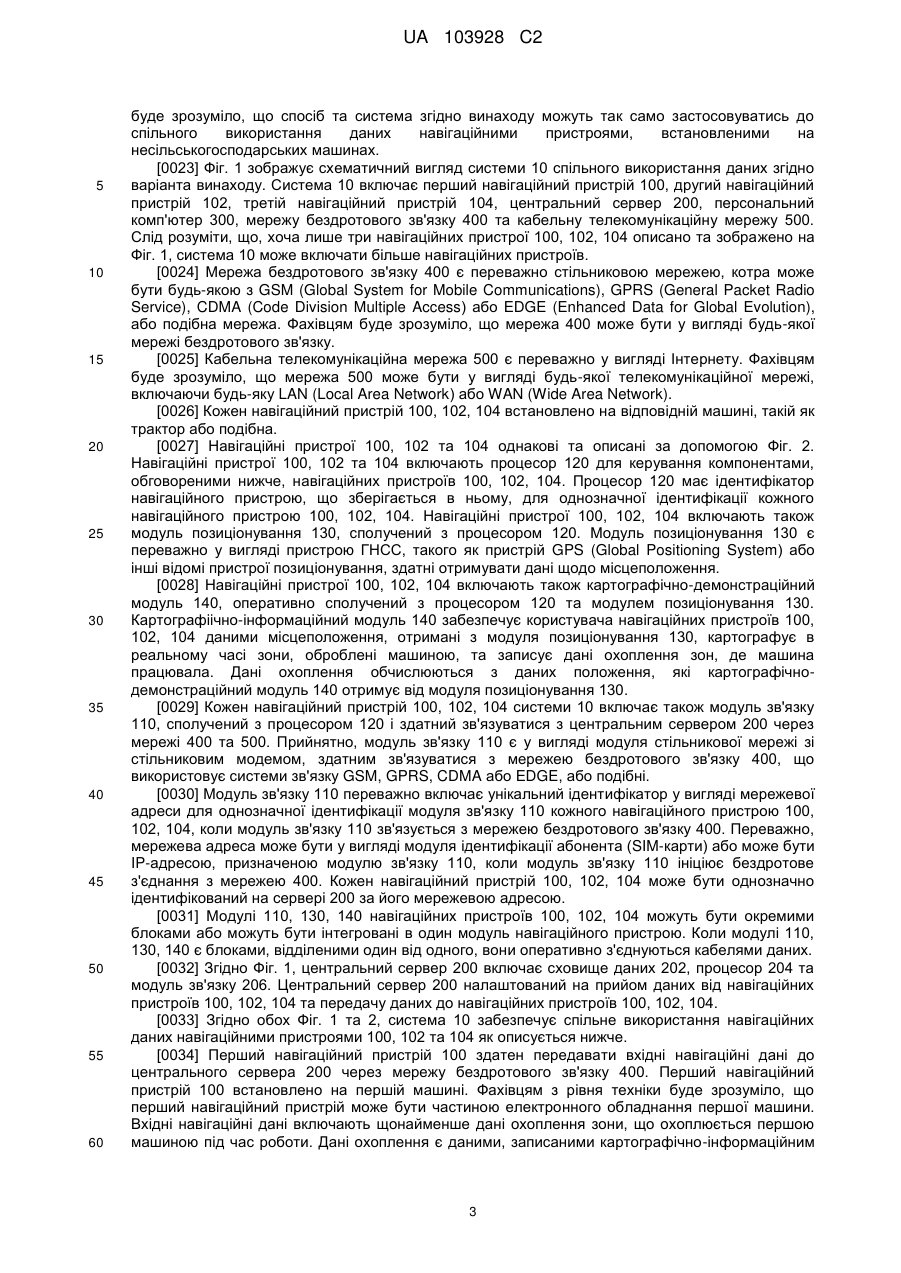
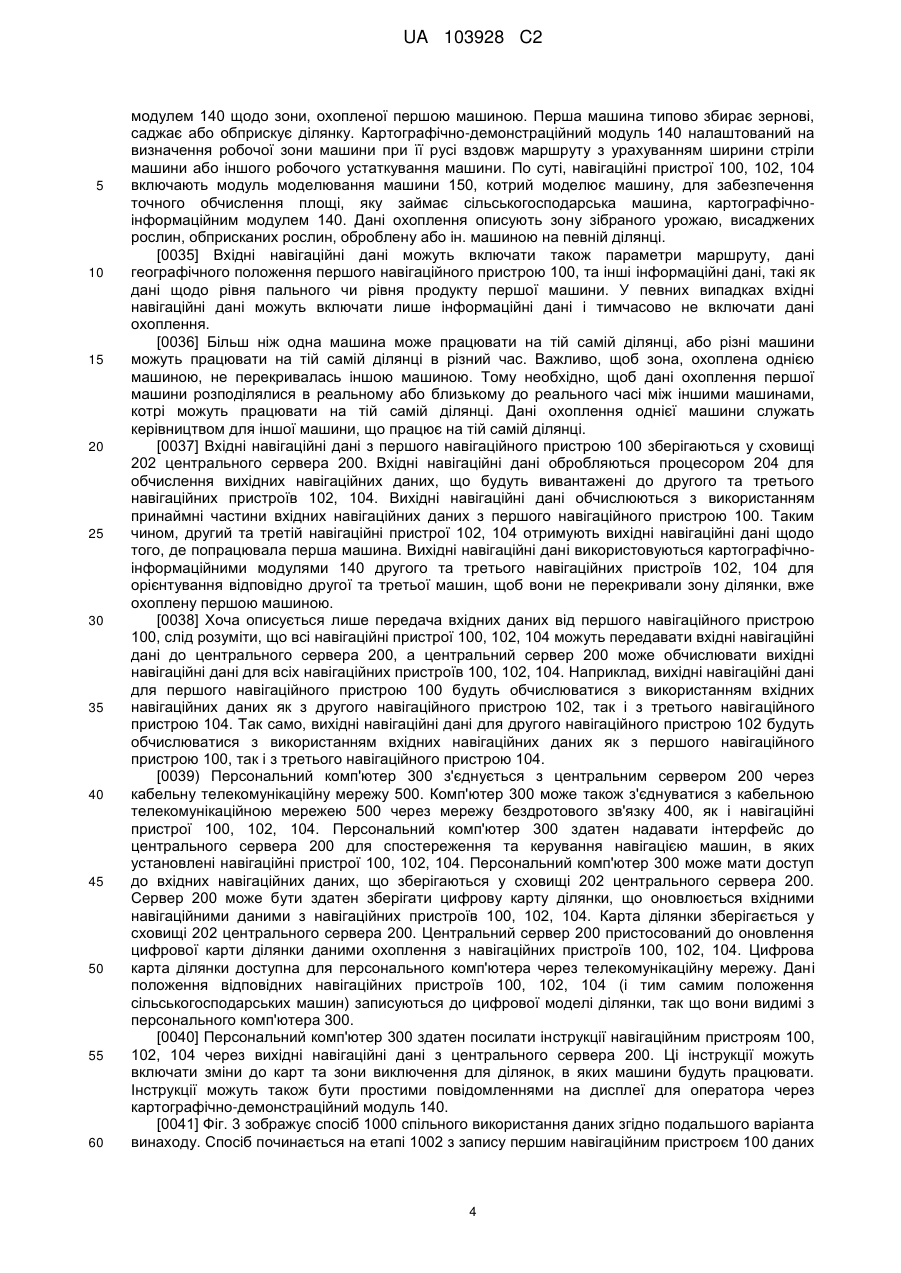
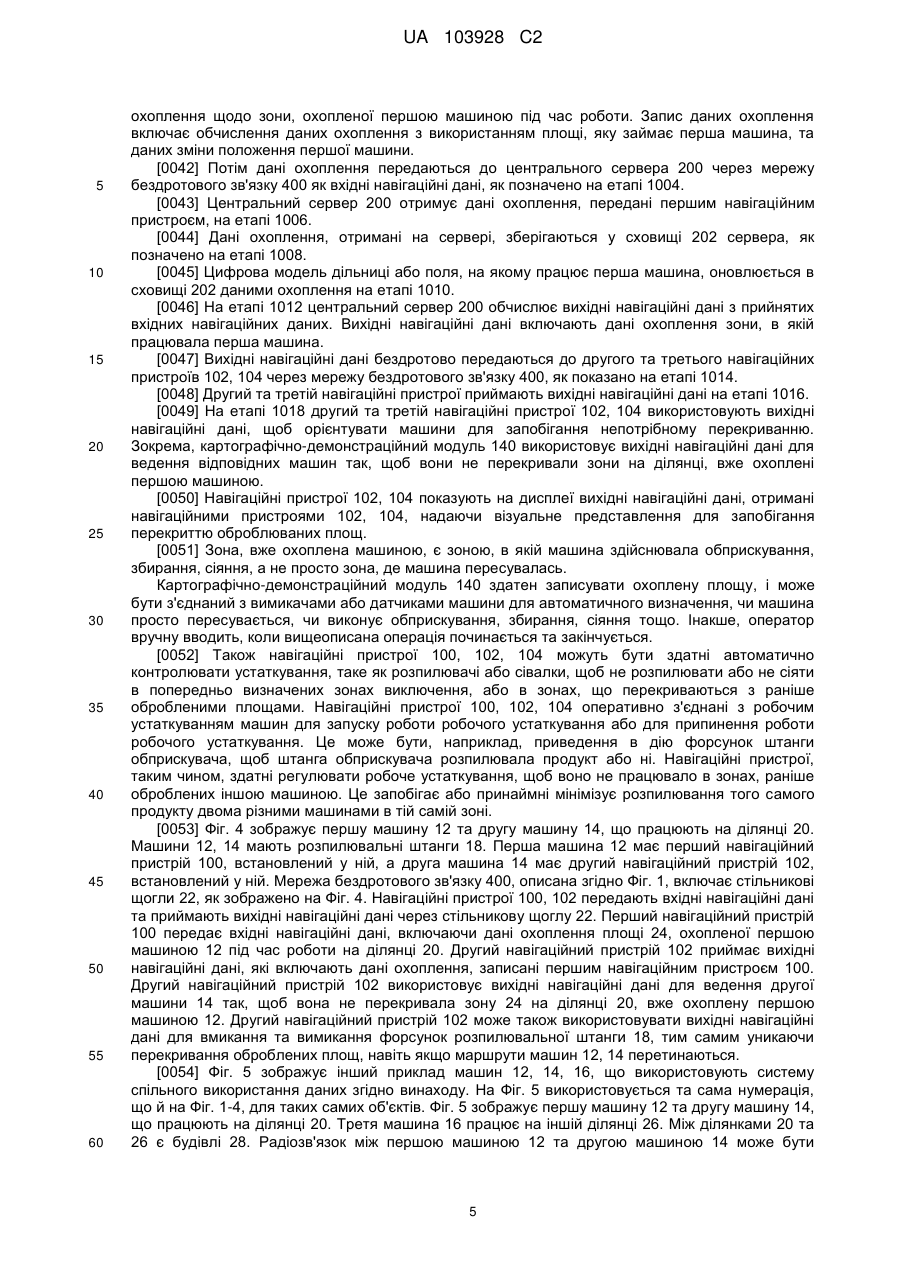
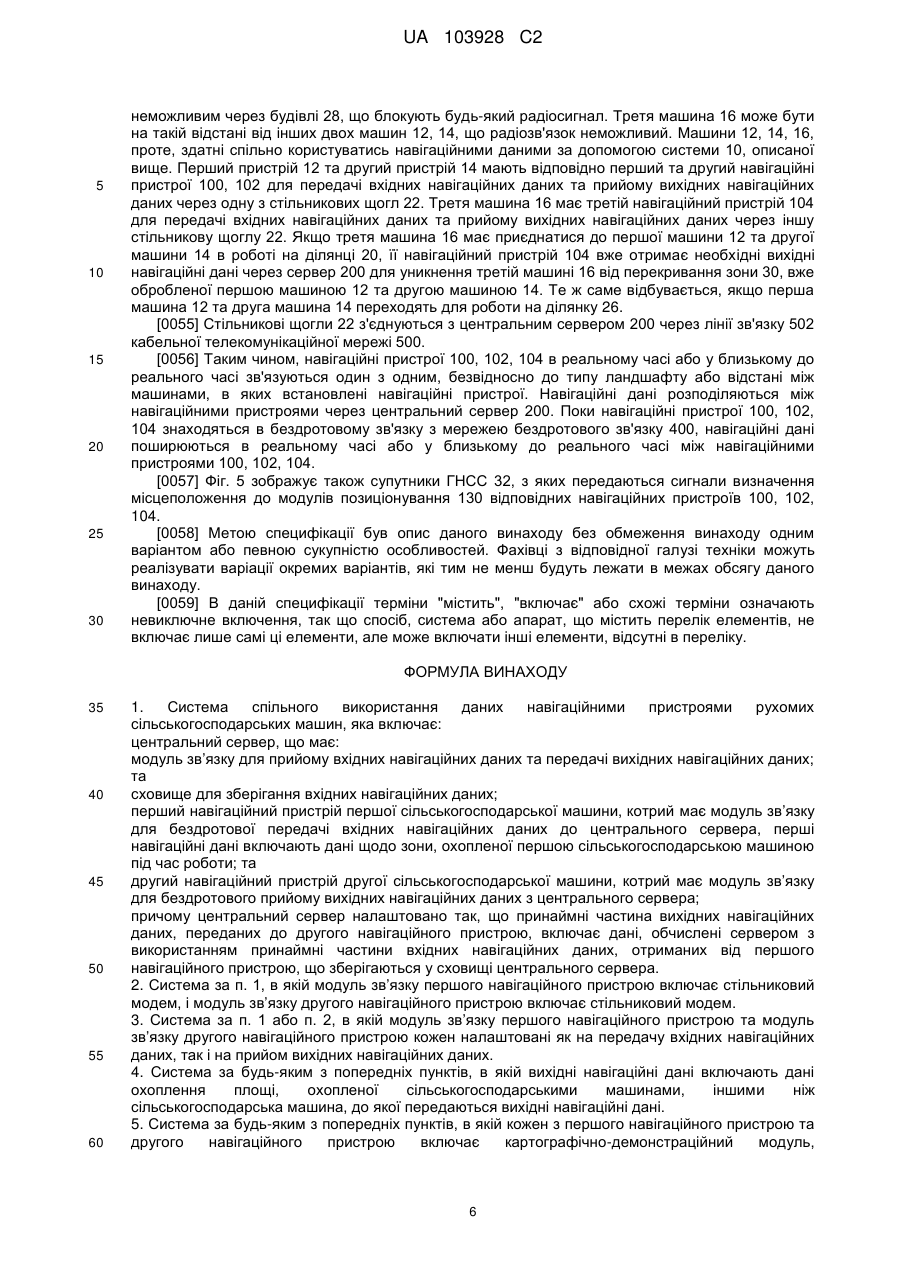
Реферат: Сільськогосподарські машини орієнтуються для запобігання перекривання зон, оброблюваних машинами. Навігаційні дані спільно використовуються сільськогосподарськими машинами через бездротову передачу даних охоплення щодо площі, охопленої першою сільськогосподарською машиною, на центральний сервер. Вихідні навігаційні дані обчислюються на центральному сервері з використанням даних охоплення, прийнятих на центральному сервері. Вихідні навігаційні дані бездротово передаються від сервера до другого навігаційного пристрою другої сільськогосподарської машини. Друга сільськогосподарська машина використовує вихідні навігаційні дані для неперекривання з площею, охопленою першою сільськогосподарською машиною під час роботи. UA 103928 C2 (12) UA 103928 C2 UA 103928 C2 5 10 15 20 25 30 35 40 45 50 55 60 ГАЛУЗЬ ВИНАХОДУ [0001] Даний винахід стосується системи спільного використання даних та способу спільного використання даних. Зокрема, хоч і не виключно, даний винахід стосується системи та способу спільного використання даних навігаційними пристроями, встановленими на рухомих сільськогосподарських машинах. ПЕРЕДУМОВИ ВИНАХОДУ [0002] Позашляхові машини, що зазвичай використовуються, наприклад, у сільському господарстві, будівництві, гірничій галузі та лісовому господарстві, такі як трактори, комбайни, екскаватори, грейдери, самоскиди та інші самохідні машини, як правило, включають електронне обладнання, призначене для допомоги оператору в веденні машини вздовж певного шляху. [0003] Зокрема, сільськогосподарські машини, такі як трактори, комбайни та інші, часто мають навігаційний пристрій, що включає модуль Глобальної Навігаційної Супутникової Системи (ГНСС) з дисплеєм для ведення машини вздовж попередньо заданого шляху за допомогою даних положення, наданих сузір'ям супутників ГНСС. [0004] Більш того, відоме використання навігаційних пристроїв, що включають модулі ГНСС, на сільськогосподарських машинах, так що маршрут може зберігатися всередині навігаційного пристрою, і навігаційний пристрій може керувати машиною в напівавтономному режимі. Інакше, навігаційний пристрій надає напрям операторові сільськогосподарської машини, даючи можливість оператору утримувати попередньо заданий фіксований курс, наприклад, при зборі зернових або обприскуванні ділянки за допомогою машини. [0005] Далі, ці навігаційні пристрої можуть застосовуватись для автоматичного контролю устаткування, такого як розпилювачі або сівалки, щоб не розпилювати або не сіяти у попередньо визначених зонах виключення, або в зонах, що перекриваються з попереднім курсом машини. [0006] Часто бажано, щоб більш ніж одна машина працювала на тій самій ділянці, або щоб різні машини працювали на тій самій ділянці в різний час. КОРОТКИЙ ОПИС ВИНАХОДУ [0007] В одному варіанті, хоча не обов'язково в найбільш поширеному, винахід полягає в системі спільного використання даних навігаційними пристроями, встановленими на рухомих сільськогосподарських машинах, яка включає: центральний сервер, що має: модуль зв'язку для прийому вхідних навігаційних даних та передачі вихідних навігаційних даних; та сховище для зберігання вхідних навігаційних даних; перший навігаційний пристрій першої сільськогосподарської машини, котрий має модуль зв'язку для бездротової передачі вхідних навігаційних даних до центрального сервера, перші навігаційні дані включають дані щодо зони, охопленої першою сільськогосподарською машиною під час роботи; та другий навігаційний пристрій другої сільськогосподарської машини, котрий має модуль зв'язку для бездротової прийому вихідних навігаційних даних з центрального сервера; а центральний сервер налаштовано так, що принаймні частина вихідних навігаційних даних, переданих до другого навігаційного пристрою, включає дані, обчислені сервером з використанням принаймні частини вхідних навігаційних даних, отриманих від першого навігаційного пристрою, що зберігаються у сховищі центрального сервера. [0008] Переважно, модулі зв'язку першого та другого навігаційних пристроїв можуть бути налаштовані для передачі вхідних навігаційних даних та прийому вихідних навігаційних даних. [0009] Переважно, модуль зв'язку кожного з навігаційних пристроїв включає бездротовий модем. Зокрема, бездротовий модем може бути стільниковим модемом. [0010] Переважно, перший та другий навігаційні пристрої кожен включають модуль позиціонування. Модулі позиціонування налаштовані на відслідковування положення окремого навігаційного пристрою для обчислення даних положення, що використовуються для обчислення даних охоплення. Модуль позиціонування є переважно у вигляді пристрою ГНСС. [0011] Переважно, перший та другий навігаційні пристрої кожен включають картографічнодемонстраційний модуль для запису даних охоплення щодо зони, охопленої машиною при роботі. [0012] В іншому варіанті, винахід полягає в центральному сервері, який забезпечує спільне використання даних навігаційними пристроями, встановленими на рухомих сільськогосподарських машинах, котрий сервер має: модуль зв'язку, сполучений з мережею бездротового зв'язку для прийому вхідних навігаційних даних від першого навігаційного пристрою першої сільськогосподарської машини 1 UA 103928 C2 5 10 15 20 25 30 35 40 45 50 55 60 та для передачі вихідних навігаційних даних до другого навігаційного пристрою другої сільськогосподарської машини через мережу бездротового зв'язку; сховище для зберігання вхідних навігаційних даних; а центральний сервер налаштовано так, що принаймні частина вихідних навігаційних даних, переданих до другого навігаційного пристрою, включає дані, обчислені центральним сервером з використанням принаймні частини вхідних навігаційних даних, отриманих від першого навігаційного пристрою, що зберігаються у сховищі центрального сервера. [0013] У ще одному варіанті, винахід полягає в навігаційному пристрої, що монтується на сільськогосподарській машині, котрий навігаційний пристрій включає: модуль позиціонування, налаштований на відслідковування положення сільськогосподарської машини; модуль моделювання машини, здатний моделювати площу, яку займає сільськогосподарська машина під час роботи; картографічно-демонстраційний модуль, здатний записувати дані охоплення зони, охопленої сільськогосподарською машиною під час роботи, та зберігати дані охоплення інших сільськогосподарських машин; модуль зв'язку, пристосований для бездротової передачі вхідних навігаційних даних, включаючи дані щодо зони, охопленої сільськогосподарською машиною під час роботи, до центрального сервера, віддаленого від сільськогосподарської машини, модуль зв'язку, пристосований для прийому вихідних навігаційних даних, включаючи дані щодо зон охоплення інших сільськогосподарських машин, від центрального сервера. [0014] Згідно ще одного варіанта, винахід полягає в способі спільного використання навігаційних даних рухомими сільськогосподарськими машинами, котрий спосіб включає: бездротову передачу вхідних навігаційних даних від першого навігаційного пристрою першої сільськогосподарської машини до центрального сервера, вхідні навігаційні дані включають дані щодо зони, охопленої першою сільськогосподарською машиною під час роботи; отримання вхідних навігаційних даних на центральному сервері; обчислення вихідних навігаційних даних на центральному сервері з використанням принаймні частини вхідних навігаційних даних, отриманих від першого навігаційного пристрою; бездротову передачу вихідних навігаційних даних від сервера до другого навігаційного пристрою другої сільськогосподарської машини; та бездротовий прийом вихідних навігаційних даних на другому навігаційному пристрої. [0015] Винахід поширюється на спосіб орієнтування сільськогосподарських машин для запобігання перекривання зон, оброблюваних рухомими сільськогосподарськими машинами, котрий спосіб включає: спільне використання даних рухомими сільськогосподарськими машинами як визначено та описано вище; та ведення другої сільськогосподарської машини з використанням вихідних навігаційних даних для неперекривання під час роботи з зоною, охопленою першою сільськогосподарською машиною під час роботи. Ведення другої сільськогосподарської машини включає керування робочим устаткуванням сільськогосподарської машини, щоб воно не працювало в зонах, вже охоплених першою сільськогосподарською машиною, коли робоче устаткування проходить над зоною, вже охопленою першою сільськогосподарською машиною. КОРОТКИЙ ОПИС КРЕСЛЕНЬ [0016] Лише в якості прикладу, переважні варіанти винаходу будуть більш детально описані нижче з використанням супровідних креслень, в яких: [0017] Фіг. 1 зображує схематичну діаграму системи спільного використання даних згідно варіанта винаходу; [0018] Фіг. 2 зображує схематичну діаграму навігаційного пристрою системи з Фіг. 1; [0019] Фіг. 3 зображує блок-схему способу спільного використання даних згідно подальших варіантів винаходу; [0020] Фіг. 4 зображує схематичний вигляд згори сільськогосподарських машин, що використовують систему спільного використання даних з Фіг. 1; та [0021] Фіг. 5 зображує схематичний вигляд згори іншого прикладу сільськогосподарських машин, що використовують систему спільного використання даних з Фіг. 1. ДЕТАЛЬНИЙ ОПИС ВИНАХОДУ [0022] Винахід буде описано в контексті спільного використання даних навігаційними пристроями, встановленими на рухомих сільськогосподарських машинах, через віддалений сервер. Дані спільно використовуються навігаційними пристроями для запобігання непотрібному перекриванню між зонами ділянки, оброблюваними кожною машиною. Фахівцям 2 UA 103928 C2 5 10 15 20 25 30 35 40 45 50 55 60 буде зрозуміло, що спосіб та система згідно винаходу можуть так само застосовуватись до спільного використання даних навігаційними пристроями, встановленими на несільськогосподарських машинах. [0023] Фіг. 1 зображує схематичний вигляд системи 10 спільного використання даних згідно варіанта винаходу. Система 10 включає перший навігаційний пристрій 100, другий навігаційний пристрій 102, третій навігаційний пристрій 104, центральний сервер 200, персональний комп'ютер 300, мережу бездротового зв'язку 400 та кабельну телекомунікаційну мережу 500. Слід розуміти, що, хоча лише три навігаційних пристрої 100, 102, 104 описано та зображено на Фіг. 1, система 10 може включати більше навігаційних пристроїв. [0024] Мережа бездротового зв'язку 400 є переважно стільниковою мережею, котра може бути будь-якою з GSM (Global System for Mobile Communications), GPRS (General Packet Radio Service), CDMA (Code Division Multiple Access) або EDGE (Enhanced Data for Global Evolution), або подібна мережа. Фахівцям буде зрозуміло, що мережа 400 може бути у вигляді будь-якої мережі бездротового зв'язку. [0025] Кабельна телекомунікаційна мережа 500 є переважно у вигляді Інтернету. Фахівцям буде зрозуміло, що мережа 500 може бути у вигляді будь-якої телекомунікаційної мережі, включаючи будь-яку LAN (Local Area Network) або WAN (Wide Area Network). [0026] Кожен навігаційний пристрій 100, 102, 104 встановлено на відповідній машині, такій як трактор або подібна. [0027] Навігаційні пристрої 100, 102 та 104 однакові та описані за допомогою Фіг. 2. Навігаційні пристрої 100, 102 та 104 включають процесор 120 для керування компонентами, обговореними нижче, навігаційних пристроїв 100, 102, 104. Процесор 120 має ідентифікатор навігаційного пристрою, що зберігається в ньому, для однозначної ідентифікації кожного навігаційного пристрою 100, 102, 104. Навігаційні пристрої 100, 102, 104 включають також модуль позиціонування 130, сполучений з процесором 120. Модуль позиціонування 130 є переважно у вигляді пристрою ГНСС, такого як пристрій GPS (Global Positioning System) або інші відомі пристрої позиціонування, здатні отримувати дані щодо місцеположення. [0028] Навігаційні пристрої 100, 102, 104 включають також картографічно-демонстраційний модуль 140, оперативно сполучений з процесором 120 та модулем позиціонування 130. Картографіічно-інформаційний модуль 140 забезпечує користувача навігаційних пристроїв 100, 102, 104 даними місцеположення, отримані з модуля позиціонування 130, картографує в реальному часі зони, оброблені машиною, та записує дані охоплення зон, де машина працювала. Дані охоплення обчислюються з даних положення, які картографічнодемонстраційний модуль 140 отримує від модуля позиціонування 130. [0029] Кожен навігаційний пристрій 100, 102, 104 системи 10 включає також модуль зв'язку 110, сполучений з процесором 120 і здатний зв'язуватися з центральним сервером 200 через мережі 400 та 500. Прийнятно, модуль зв'язку 110 є у вигляді модуля стільникової мережі зі стільниковим модемом, здатним зв'язуватися з мережею бездротового зв'язку 400, що використовує системи зв'язку GSM, GPRS, CDMA або EDGE, або подібні. [0030] Модуль зв'язку 110 переважно включає унікальний ідентифікатор у вигляді мережевої адреси для однозначної ідентифікації модуля зв'язку 110 кожного навігаційного пристрою 100, 102, 104, коли модуль зв'язку 110 зв'язується з мережею бездротового зв'язку 400. Переважно, мережева адреса може бути у вигляді модуля ідентифікації абонента (SIM-карти) або може бути IP-адресою, призначеною модулю зв'язку 110, коли модуль зв'язку 110 ініціює бездротове з'єднання з мережею 400. Кожен навігаційний пристрій 100, 102, 104 може бути однозначно ідентифікований на сервері 200 за його мережевою адресою. [0031] Модулі 110, 130, 140 навігаційних пристроїв 100, 102, 104 можуть бути окремими блоками або можуть бути інтегровані в один модуль навігаційного пристрою. Коли модулі 110, 130, 140 є блоками, відділеними один від одного, вони оперативно з'єднуються кабелями даних. [0032] Згідно Фіг. 1, центральний сервер 200 включає сховище даних 202, процесор 204 та модуль зв'язку 206. Центральний сервер 200 налаштований на прийом даних від навігаційних пристроїв 100, 102, 104 та передачу даних до навігаційних пристроїв 100, 102, 104. [0033] Згідно обох Фіг. 1 та 2, система 10 забезпечує спільне використання навігаційних даних навігаційними пристроями 100, 102 та 104 як описується нижче. [0034] Перший навігаційний пристрій 100 здатен передавати вхідні навігаційні дані до центрального сервера 200 через мережу бездротового зв'язку 400. Перший навігаційний пристрій 100 встановлено на першій машині. Фахівцям з рівня техніки буде зрозуміло, що перший навігаційний пристрій може бути частиною електронного обладнання першої машини. Вхідні навігаційні дані включають щонайменше дані охоплення зони, що охоплюється першою машиною під час роботи. Дані охоплення є даними, записаними картографічно-інформаційним 3 UA 103928 C2 5 10 15 20 25 30 35 40 45 50 55 60 модулем 140 щодо зони, охопленої першою машиною. Перша машина типово збирає зернові, саджає або обприскує ділянку. Картографічно-демонстраційний модуль 140 налаштований на визначення робочої зони машини при її русі вздовж маршруту з урахуванням ширини стріли машини або іншого робочого устаткування машини. По суті, навігаційні пристрої 100, 102, 104 включають модуль моделювання машини 150, котрий моделює машину, для забезпечення точного обчислення площі, яку займає сільськогосподарська машина, картографічноінформаційним модулем 140. Дані охоплення описують зону зібраного урожаю, висаджених рослин, обприсканих рослин, оброблену або ін. машиною на певній ділянці. [0035] Вхідні навігаційні дані можуть включати також параметри маршруту, дані географічного положення першого навігаційного пристрою 100, та інші інформаційні дані, такі як дані щодо рівня пального чи рівня продукту першої машини. У певних випадках вхідні навігаційні дані можуть включати лише інформаційні дані і тимчасово не включати дані охоплення. [0036] Більш ніж одна машина може працювати на тій самій ділянці, або різні машини можуть працювати на тій самій ділянці в різний час. Важливо, щоб зона, охоплена однією машиною, не перекривалась іншою машиною. Тому необхідно, щоб дані охоплення першої машини розподілялися в реальному або близькому до реального часі між іншими машинами, котрі можуть працювати на тій самій ділянці. Дані охоплення однієї машини служать керівництвом для іншої машини, що працює на тій самій ділянці. [0037] Вхідні навігаційні дані з першого навігаційного пристрою 100 зберігаються у сховищі 202 центрального сервера 200. Вхідні навігаційні дані обробляються процесором 204 для обчислення вихідних навігаційних даних, що будуть вивантажені до другого та третього навігаційних пристроїв 102, 104. Вихідні навігаційні дані обчислюються з використанням принаймні частини вхідних навігаційних даних з першого навігаційного пристрою 100. Таким чином, другий та третій навігаційні пристрої 102, 104 отримують вихідні навігаційні дані щодо того, де попрацювала перша машина. Вихідні навігаційні дані використовуються картографічноінформаційними модулями 140 другого та третього навігаційних пристроїв 102, 104 для орієнтування відповідно другої та третьої машин, щоб вони не перекривали зону ділянки, вже охоплену першою машиною. [0038] Хоча описується лише передача вхідних даних від першого навігаційного пристрою 100, слід розуміти, що всі навігаційні пристрої 100, 102, 104 можуть передавати вхідні навігаційні дані до центрального сервера 200, а центральний сервер 200 може обчислювати вихідні навігаційні дані для всіх навігаційних пристроїв 100, 102, 104. Наприклад, вихідні навігаційні дані для першого навігаційного пристрою 100 будуть обчислюватися з використанням вхідних навігаційних даних як з другого навігаційного пристрою 102, так і з третього навігаційного пристрою 104. Так само, вихідні навігаційні дані для другого навігаційного пристрою 102 будуть обчислюватися з використанням вхідних навігаційних даних як з першого навігаційного пристрою 100, так і з третього навігаційного пристрою 104. [0039) Персональний комп'ютер 300 з'єднується з центральним сервером 200 через кабельну телекомунікаційну мережу 500. Комп'ютер 300 може також з'єднуватися з кабельною телекомунікаційною мережею 500 через мережу бездротового зв'язку 400, як і навігаційні пристрої 100, 102, 104. Персональний комп'ютер 300 здатен надавати інтерфейс до центрального сервера 200 для спостереження та керування навігацією машин, в яких установлені навігаційні пристрої 100, 102, 104. Персональний комп'ютер 300 може мати доступ до вхідних навігаційних даних, що зберігаються у сховищі 202 центрального сервера 200. Сервер 200 може бути здатен зберігати цифрову карту ділянки, що оновлюється вхідними навігаційними даними з навігаційних пристроїв 100, 102, 104. Карта ділянки зберігається у сховищі 202 центрального сервера 200. Центральний сервер 200 пристосований до оновлення цифрової карти ділянки даними охоплення з навігаційних пристроїв 100, 102, 104. Цифрова карта ділянки доступна для персонального комп'ютера через телекомунікаційну мережу. Дані положення відповідних навігаційних пристроїв 100, 102, 104 (і тим самим положення сільськогосподарських машин) записуються до цифрової моделі ділянки, так що вони видимі з персонального комп'ютера 300. [0040] Персональний комп'ютер 300 здатен посилати інструкції навігаційним пристроям 100, 102, 104 через вихідні навігаційні дані з центрального сервера 200. Ці інструкції можуть включати зміни до карт та зони виключення для ділянок, в яких машини будуть працювати. Інструкції можуть також бути простими повідомленнями на дисплеї для оператора через картографічно-демонстраційний модуль 140. [0041] Фіг. 3 зображує спосіб 1000 спільного використання даних згідно подальшого варіанта винаходу. Спосіб починається на етапі 1002 з запису першим навігаційним пристроєм 100 даних 4 UA 103928 C2 5 10 15 20 25 30 35 40 45 50 55 60 охоплення щодо зони, охопленої першою машиною під час роботи. Запис даних охоплення включає обчислення даних охоплення з використанням площі, яку займає перша машина, та даних зміни положення першої машини. [0042] Потім дані охоплення передаються до центрального сервера 200 через мережу бездротового зв'язку 400 як вхідні навігаційні дані, як позначено на етапі 1004. [0043] Центральний сервер 200 отримує дані охоплення, передані першим навігаційним пристроєм, на етапі 1006. [0044] Дані охоплення, отримані на сервері, зберігаються у сховищі 202 сервера, як позначено на етапі 1008. [0045] Цифрова модель дільниці або поля, на якому працює перша машина, оновлюється в сховищі 202 даними охоплення на етапі 1010. [0046] На етапі 1012 центральний сервер 200 обчислює вихідні навігаційні дані з прийнятих вхідних навігаційних даних. Вихідні навігаційні дані включають дані охоплення зони, в якій працювала перша машина. [0047] Вихідні навігаційні дані бездротово передаються до другого та третього навігаційних пристроїв 102, 104 через мережу бездротового зв'язку 400, як показано на етапі 1014. [0048] Другий та третій навігаційні пристрої приймають вихідні навігаційні дані на етапі 1016. [0049] На етапі 1018 другий та третій навігаційні пристрої 102, 104 використовують вихідні навігаційні дані, щоб орієнтувати машини для запобігання непотрібному перекриванню. Зокрема, картографічно-демонстраційний модуль 140 використовує вихідні навігаційні дані для ведення відповідних машин так, щоб вони не перекривали зони на ділянці, вже охоплені першою машиною. [0050] Навігаційні пристрої 102, 104 показують на дисплеї вихідні навігаційні дані, отримані навігаційними пристроями 102, 104, надаючи візуальне представлення для запобігання перекриттю оброблюваних площ. [0051] Зона, вже охоплена машиною, є зоною, в якій машина здійснювала обприскування, збирання, сіяння, а не просто зона, де машина пересувалась. Картографічно-демонстраційний модуль 140 здатен записувати охоплену площу, і може бути з'єднаний з вимикачами або датчиками машини для автоматичного визначення, чи машина просто пересувається, чи виконує обприскування, збирання, сіяння тощо. Інакше, оператор вручну вводить, коли вищеописана операція починається та закінчується. [0052] Також навігаційні пристрої 100, 102, 104 можуть бути здатні автоматично контролювати устаткування, таке як розпилювачі або сівалки, щоб не розпилювати або не сіяти в попередньо визначених зонах виключення, або в зонах, що перекриваються з раніше обробленими площами. Навігаційні пристрої 100, 102, 104 оперативно з'єднані з робочим устаткуванням машин для запуску роботи робочого устаткування або для припинення роботи робочого устаткування. Це може бути, наприклад, приведення в дію форсунок штанги обприскувача, щоб штанга обприскувача розпилювала продукт або ні. Навігаційні пристрої, таким чином, здатні регулювати робоче устаткування, щоб воно не працювало в зонах, раніше оброблених іншою машиною. Це запобігає або принаймні мінімізує розпилювання того самого продукту двома різними машинами в тій самій зоні. [0053] Фіг. 4 зображує першу машину 12 та другу машину 14, що працюють на ділянці 20. Машини 12, 14 мають розпилювальні штанги 18. Перша машина 12 має перший навігаційний пристрій 100, встановлений у ній, а друга машина 14 має другий навігаційний пристрій 102, встановлений у ній. Мережа бездротового зв'язку 400, описана згідно Фіг. 1, включає стільникові щогли 22, як зображено на Фіг. 4. Навігаційні пристрої 100, 102 передають вхідні навігаційні дані та приймають вихідні навігаційні дані через стільникову щоглу 22. Перший навігаційний пристрій 100 передає вхідні навігаційні дані, включаючи дані охоплення площі 24, охопленої першою машиною 12 під час роботи на ділянці 20. Другий навігаційний пристрій 102 приймає вихідні навігаційні дані, які включають дані охоплення, записані першим навігаційним пристроєм 100. Другий навігаційний пристрій 102 використовує вихідні навігаційні дані для ведення другої машини 14 так, щоб вона не перекривала зону 24 на ділянці 20, вже охоплену першою машиною 12. Другий навігаційний пристрій 102 може також використовувати вихідні навігаційні дані для вмикання та вимикання форсунок розпилювальної штанги 18, тим самим уникаючи перекривання оброблених площ, навіть якщо маршрути машин 12, 14 перетинаються. [0054] Фіг. 5 зображує інший приклад машин 12, 14, 16, що використовують систему спільного використання даних згідно винаходу. На Фіг. 5 використовується та сама нумерація, що й на Фіг. 1-4, для таких самих об'єктів. Фіг. 5 зображує першу машину 12 та другу машину 14, що працюють на ділянці 20. Третя машина 16 працює на іншій ділянці 26. Між ділянками 20 та 26 є будівлі 28. Радіозв'язок між першою машиною 12 та другою машиною 14 може бути 5 UA 103928 C2 5 10 15 20 25 30 неможливим через будівлі 28, що блокують будь-який радіосигнал. Третя машина 16 може бути на такій відстані від інших двох машин 12, 14, що радіозв'язок неможливий. Машини 12, 14, 16, проте, здатні спільно користуватись навігаційними даними за допомогою системи 10, описаної вище. Перший пристрій 12 та другий пристрій 14 мають відповідно перший та другий навігаційні пристрої 100, 102 для передачі вхідних навігаційних даних та прийому вихідних навігаційних даних через одну з стільникових щогл 22. Третя машина 16 має третій навігаційний пристрій 104 для передачі вхідних навігаційних даних та прийому вихідних навігаційних даних через іншу стільникову щоглу 22. Якщо третя машина 16 має приєднатися до першої машини 12 та другої машини 14 в роботі на ділянці 20, її навігаційний пристрій 104 вже отримає необхідні вихідні навігаційні дані через сервер 200 для уникнення третій машині 16 від перекривання зони 30, вже обробленої першою машиною 12 та другою машиною 14. Те ж саме відбувається, якщо перша машина 12 та друга машина 14 переходять для роботи на ділянку 26. [0055] Стільникові щогли 22 з'єднуються з центральним сервером 200 через лінії зв'язку 502 кабельної телекомунікаційної мережі 500. [0056] Таким чином, навігаційні пристрої 100, 102, 104 в реальному часі або у близькому до реального часі зв'язуються один з одним, безвідносно до типу ландшафту або відстані між машинами, в яких встановлені навігаційні пристрої. Навігаційні дані розподіляються між навігаційними пристроями через центральний сервер 200. Поки навігаційні пристрої 100, 102, 104 знаходяться в бездротовому зв'язку з мережею бездротового зв'язку 400, навігаційні дані поширюються в реальному часі або у близькому до реального часі між навігаційними пристроями 100, 102, 104. [0057] Фіг. 5 зображує також супутники ГНСС 32, з яких передаються сигнали визначення місцеположення до модулів позиціонування 130 відповідних навігаційних пристроїв 100, 102, 104. [0058] Метою специфікації був опис даного винаходу без обмеження винаходу одним варіантом або певною сукупністю особливостей. Фахівці з відповідної галузі техніки можуть реалізувати варіації окремих варіантів, які тим не менш будуть лежати в межах обсягу даного винаходу. [0059] В даній специфікації терміни "містить", "включає" або схожі терміни означають невиключне включення, так що спосіб, система або апарат, що містить перелік елементів, не включає лише самі ці елементи, але може включати інші елементи, відсутні в переліку. ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 60 1. Система спільного використання даних навігаційними пристроями рухомих сільськогосподарських машин, яка включає: центральний сервер, що має: модуль зв’язку для прийому вхідних навігаційних даних та передачі вихідних навігаційних даних; та сховище для зберігання вхідних навігаційних даних; перший навігаційний пристрій першої сільськогосподарської машини, котрий має модуль зв’язку для бездротової передачі вхідних навігаційних даних до центрального сервера, перші навігаційні дані включають дані щодо зони, охопленої першою сільськогосподарською машиною під час роботи; та другий навігаційний пристрій другої сільськогосподарської машини, котрий має модуль зв’язку для бездротового прийому вихідних навігаційних даних з центрального сервера; причому центральний сервер налаштовано так, що принаймні частина вихідних навігаційних даних, переданих до другого навігаційного пристрою, включає дані, обчислені сервером з використанням принаймні частини вхідних навігаційних даних, отриманих від першого навігаційного пристрою, що зберігаються у сховищі центрального сервера. 2. Система за п. 1, в якій модуль зв’язку першого навігаційного пристрою включає стільниковий модем, і модуль зв’язку другого навігаційного пристрою включає стільниковий модем. 3. Система за п. 1 або п. 2, в якій модуль зв’язку першого навігаційного пристрою та модуль зв’язку другого навігаційного пристрою кожен налаштовані як на передачу вхідних навігаційних даних, так і на прийом вихідних навігаційних даних. 4. Система за будь-яким з попередніх пунктів, в якій вихідні навігаційні дані включають дані охоплення площі, охопленої сільськогосподарськими машинами, іншими ніж сільськогосподарська машина, до якої передаються вихідні навігаційні дані. 5. Система за будь-яким з попередніх пунктів, в якій кожен з першого навігаційного пристрою та другого навігаційного пристрою включає картографічно-демонстраційний модуль, 6 UA 103928 C2 5 10 15 20 25 30 35 40 45 50 55 60 картографічно-демонстраційний модуль здатен записувати та демонструвати дані охоплення щодо площі, охопленої сільськогосподарською машиною, в якій розташований відповідний навігаційний пристрій, і здатен демонструвати дані охоплення сільськогосподарських машин, інших ніж сільськогосподарська машина, в якій розташований навігаційний пристрій, дані охоплення сільськогосподарських машин, інших ніж сільськогосподарська машина, в якій розташований навігаційний пристрій, приймаються навігаційним пристроєм як вихідні навігаційні дані. 6. Система за будь-яким з попередніх пунктів, в якій модуль зв’язку першого навігаційного пристрою та модуль зв’язку другого навігаційного пристрою кожен мають унікальну мережеву адресу для однозначної ідентифікації відповідно першого навігаційного пристрою та другого навігаційного пристрою. 7. Система за будь-яким з попередніх пунктів, в якій кожен з першого навігаційного пристрою та другого навігаційного пристрою включає модуль позиціонування, модуль позиціонування налаштований на відслідковування положення відповідних навігаційних пристроїв для обчислення даних положення, що використовуються в обчисленні даних охоплення. 8. Система за п. 7, в якій модуль позиціонування є переважно у вигляді пристрою Глобальної Навігаційної Супутникової Системи. 9. Система за п. 7 або п. 8, в якій кожен з першого навігаційного пристрою та другого навігаційного пристрою включає модуль моделювання машини для моделювання площі, яку займає сільськогосподарська машина, в якій розташований навігаційний пристрій, перший навігаційний пристрій та другий навігаційний пристрій здатні обчислювати дані охоплення з використанням площі, яку займає сільськогосподарська машина, в якій розташований навігаційний пристрій, та даних зміни положення сільськогосподарської машини. 10. Система за будь-яким з попередніх пунктів, в якій центральний сервер налаштований для доступу з персонального комп’ютера через мережу. 11. Система за п. 10, в якій центральний сервер налаштований для одержання інструкцій, направлених до одного з першого навігаційного пристрою чи другого навігаційного пристрою з персонального комп’ютера, і здатен передавати інструкції як вихідні навігаційні дані до одного з першого навігаційного пристрою чи другого навігаційного пристрою. 12. Система за п. 10 або п. 11, в якій центральний сервер здатен зберігати цифрову карту ділянки, що оновлюється вхідними навігаційними даними з навігаційних пристроїв, і цифрова карта ділянки доступна для перегляду з персонального комп’ютера. 13. Система за п. 12, в якій вхідні навігаційні дані включають дані положення першої сільськогосподарської машини, а центральний сервер здатен записувати положення першої сільськогосподарської машини на цифровій карті ділянки. 14. Центральний сервер, який забезпечує спільне використання даних навігаційними пристроями, встановленими на рухомих сільськогосподарських машинах, центральний сервер має: модуль зв’язку, сполучений з мережею бездротового зв’язку для прийому вхідних навігаційних даних від першого навігаційного пристрою першої сільськогосподарської машини та для передачі вихідних навігаційних даних до другого навігаційного пристрою другої сільськогосподарської машини через мережу бездротового зв’язку; сховище для зберігання вхідних навігаційних даних, включаючи дані охоплення щодо площі, охопленої першою сільськогосподарською машиною під час роботи; причому центральний сервер налаштовано так, що принаймні частина вихідних навігаційних даних, переданих до другого навігаційного пристрою, включає дані, обчислені центральним сервером з використанням принаймні частини даних охоплення, що зберігаються у сховищі центрального сервера. 15. Центральний сервер за п. 14, де центральний сервер налаштований для доступу з персонального комп’ютера через мережу. 16. Центральний сервер за п. 15, де центральний сервер налаштований для одержання інструкцій, направлених до одного з першого навігаційного пристрою чи другого навігаційного пристрою з персонального комп’ютера, і здатен передавати інструкції як вихідні навігаційні дані до одного з першого навігаційного пристрою чи другого навігаційного пристрою. 17. Центральний сервер за п. 15 або п. 16, де центральний сервер здатен зберігати цифрову карту ділянки, що оновлюється вхідними навігаційними даними з навігаційних пристроїв, і цифрова карта ділянки доступна для перегляду з персонального комп’ютера. 18. Центральний сервер за п. 17, де центральний сервер пристосований до оновлення цифрової карти ділянки даними охоплення з вхідних навігаційних даних, отриманих з навігаційних пристроїв. 7 UA 103928 C2 5 10 15 20 25 30 35 40 45 50 55 19. Навігаційний пристрій для сільськогосподарської машини, який включає: модуль позиціонування, налаштований на відслідковування положення сільськогосподарської машини; модуль моделювання машини, здатний моделювати площу, яку займає сільськогосподарська машина під час роботи; картографічно-демонстраційний модуль, здатний записувати дані охоплення зони, охопленої сільськогосподарською машиною під час роботи, та зберігати дані охоплення інших сільськогосподарських машин; та модуль зв’язку, пристосований для бездротової передачі вхідних навігаційних даних, включаючи дані щодо зони, охопленої сільськогосподарською машиною під час роботи, до центрального сервера, віддаленого від сільськогосподарської машини, модуль зв’язку пристосований для прийому вихідних навігаційних даних, включаючи дані щодо зон охоплення інших сільськогосподарських машин, від центрального сервера. 20. Навігаційний пристрій за п. 19, в якому модуль зв’язку включає стільниковий модем для бездротового зв’язку з центральним сервером. 21. Навігаційний пристрій за п. 19 або п. 20, в якому модуль зв’язку навігаційного пристрою має унікальний ідентифікатор для однозначної ідентифікації навігаційного пристрою на центральному сервері. 22. Навігаційний пристрій за будь-яким з пп. 19-21, в якому картографічно-демонстраційний модуль здатен демонструвати дані охоплення щодо площі, охопленої сільськогосподарською машиною, в якій розташований навігаційний пристрій, і здатен демонструвати дані охоплення інших сільськогосподарських машин. 23. Навігаційний пристрій за будь-яким з пп. 19-22, в якому картографічно-демонстраційний модуль пристосований для орієнтування сільськогосподарської машини відносно площі, охопленої іншими сільськогосподарськими машинами. 24. Навігаційний пристрій за п. 23, в якому картографічно-демонстраційний модуль пристосований для ведення сільськогосподарської машини без перекривання з площею, охопленою іншими сільськогосподарськими машинами. 25. Навігаційний пристрій за будь-яким з пп. 19-24, в якому навігаційний пристрій здатен автоматично керувати робочим обладнанням сільськогосподарської машини, щоб воно не працювало над зоною, вже охопленою іншими сільськогосподарськими машинами. 26. Спосіб спільного використання навігаційних даних рухомими сільськогосподарськими машинами, який включає: бездротову передачу вхідних навігаційних даних від першого навігаційного пристрою першої сільськогосподарської машини до центрального сервера, вхідні навігаційні дані включають дані щодо зони, охопленої першою сільськогосподарською машиною під час роботи; прийом вхідних навігаційних даних на центральному сервері; обчислення вихідних навігаційних даних на центральному сервері з використанням принаймні частини вхідних навігаційних даних, отриманих від першого навігаційного пристрою; бездротову передачу вихідних навігаційних даних від сервера до другого навігаційного пристрою другої сільськогосподарської машини; та бездротовий прийом вихідних навігаційних даних на другому навігаційному пристрої. 27. Спосіб за п. 26, який включає: бездротову передачу другим навігаційним пристроєм вхідних навігаційних даних, включаючи дані охоплення щодо площі, охопленої другою сільськогосподарською машиною під час роботи, від другого навігаційного пристрою до центрального сервера; та бездротовий прийом першим навігаційним пристроєм вихідних навігаційних даних, обчислених центральним сервером з принаймні частини вхідних навігаційних даних, прийнятих на центральному сервері від другого навігаційного пристрою. 28. Спосіб за п. 26 або п. 27, що включає ідентифікацію першого навігаційного пристрою та другого навігаційного пристрою на центральному сервері за унікальною мережевою адресою кожного з першого навігаційного пристрою та другого навігаційного пристрою. 29. Спосіб за будь-яким з пп. 26-28, який включає: моделювання площі, яку займає перша сільськогосподарська машина; та обчислення даних охоплення першої сільськогосподарської машини під час роботи з використанням даних зміни положення першої сільськогосподарської машини та площі, яку займає перша сільськогосподарська машина. 30. Спосіб за будь-яким з пп. 26-29, який включає зберігання цифрової карти ділянки на центральному сервері та оновлення цифрової карти ділянки вхідними навігаційними даними. 8 UA 103928 C2 5 10 15 31. Спосіб ведення сільськогосподарських машин для запобігання перекривання зон, оброблюваних сільськогосподарськими машинами, який включає: спільне використання навігаційних даних рухомими сільськогосподарськими машинами як визначено в будь-якому з пп. 26-30; та ведення другої сільськогосподарської машини з використанням вихідних навігаційних даних для неперекривання під час роботи з зоною, охопленою першою сільськогосподарською машиною під час роботи. 32. Спосіб ведення сільськогосподарських машин за п. 31, в якому ведення другої сільськогосподарської машини включає керування робочим устаткуванням сільськогосподарської машини, щоб воно не працювало над площами, вже охопленими першою сільськогосподарською машиною, коли робоче устаткування проходить над площею, вже охопленою першою сільськогосподарською машиною. 33. Спосіб ведення сільськогосподарських машин за п. 31 або п. 32, в якому спосіб включає: демонстрацію даних охоплення щодо площі, охопленої сільськогосподарською машиною, в якій знаходиться відповідний навігаційний пристрій, на дисплеї; та демонстрацію даних охоплення сільськогосподарськими машинами, іншими ніж сільськогосподарська машина, в якій знаходиться відповідний навігаційний пристрій, на дисплеї. 9 UA 103928 C2 10 UA 103928 C2 11 UA 103928 C2 12 UA 103928 C2 13 UA 103928 C2 Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 14
ДивитисяДодаткова інформація
Назва патенту англійськоюA system and method of data sharing
Автори англійськоюRoberts, Peter James, Bailey, Peter Andrew
Автори російськоюРобертс Питер Джеймс, Бэйли Питер Эндрю
МПК / Мітки
МПК: H04W 4/04, G05D 1/02, G01C 21/00, G05D 1/00, G08G 1/16
Мітки: даних, використання, система, спільного, спосіб
Код посилання
<a href="https://ua.patents.su/16-103928-sistema-ta-sposib-spilnogo-vikoristannya-danikh.html" target="_blank" rel="follow" title="База патентів України">Система та спосіб спільного використання даних</a>
Інтегрована система навігаційного забезпечення низькоорбітальних космічних апаратів
Номер патенту: 24686
Опубліковано: 10.07.2007
Автори: Козелкова Катерина Сергіївна, Загорулько Олександр Миколайович, Богом'я Володимир Іванович, Моргун Олександр Андрійович
МПК: G01S 5/02, G01C 21/24
Мітки: космічних, апаратів, навігаційного, низькоорбітальних, система, забезпечення, інтегрована
Формула / Реферат:
Інтегрована система навігаційного забезпечення низькоорбітальних космічних апаратів, що містить антенний пристрій, навігаційний приймальний пристрій і навігаційний процесор, яка відрізняється тим, що навігаційний процесор виконаний з можливістю динамічної фільтрації вимірювань на основі моделі гравітаційного поля Землі з гармоніками розкладання гравітаційного потенціалу розмірності 36х36, що дозволяє підвищити точність визначення координат...
Спосіб керування доступом станції даних до мобільних носіїв даних, мобільний носій даних, станція даних і система для здійснення способу
Номер патенту: 46781
Опубліковано: 17.06.2002
Автор: Райнер Роберт
МПК: H04L 12/407, G06K 19/07, G06K 17/00, G06K 7/00
Мітки: даних, способу, станція, здійснення, станції, носіїв, мобільній, мобільних, носій, система, керування, доступом, спосіб
Формула / Реферат:
1. Спосіб керування доступом станції даних (61) до щонайменше двох мобільних носіїв даних (51), при якому ці носії даних на вимогу станції даних синхронно передають свої ідентифікаційні номери, і станція даних визначає, чи приймаються щонайменше в одному двійковому розряді прийнятих ідентифікаційних номерів два різних значення біта, і потім, якщо принаймні в одному двійковому розряді прийнятих ідентифікаційних номерів будуть визначені як...
Система передачі даних, передавач, приймач та носій інформації для використання в цій системі
Номер патенту: 29390
Опубліковано: 15.11.2000
Автори: Блютген Бйорн, Спіро Ричард Сес
МПК: G11B 27/34, G11B 20/00, G11B 20/10
Мітки: системі, носій, передавач, приймач, інформації, передачі, використання, цій, система, даних
Текст:
...формат текстового пакета. Показанный текстовый пакет содержит сорок восемь байт по восемь бит каждый. Первые восемь байт используют для передачи параллельных управляющих кодов. Параллельные управляющие коды содержат позиционные коды 21РС и 2РС. Позиционный код 21РС указывает положение строки, в котором соответствующая строка текста должна быть отображена на 21-строчном дисплее. Позиционный код 2РС указывает положение строки соответствующей...
Спосіб спільного використання ресурсу цифрової системи
Номер патенту: 70592
Опубліковано: 15.10.2004
Автори: Топчев Михайло Дмитрович, Кривоносов Віктор Борисович, Ващенко Василь Пилипович
МПК: G06F 13/20
Мітки: спільного, цифрової, ресурсу, системі, використання, спосіб
Формула / Реферат:
1. Спосіб спільного використання ресурсу цифрової системи, за яким між ресурсами підсистем, такими як елементи пам'яті підсистем, здійснюють інформаційний обмін згідно з встановленим алгоритмом з використанням тактових імпульсів, до елементів пам'яті визначеної підсистеми згідно з тактовими імпульсами записують інформацію через інформаційний обмін з елементами пам'яті першої підсистеми, процесор якої на цей час закривають для інформаційного...
Система і спосіб синхронізації і організації бази даних
Номер патенту: 65638
Опубліковано: 15.04.2004
Автори: Махаджан Самір Р., Донаху Майкл Дж., Макгеф Френк Х., Нават Шамкант Б., Малік Сенджой, Аммар Мустафа Х.
МПК: G06F 17/30, G06F 12/00
Мітки: базі, синхронізації, система, організації, даних, спосіб
Формула / Реферат:
1. Спосіб оновлення баз даних у комп'ютері клієнта, який відрізняється тим, що включає групування даних у базі даних сервера згідно з вибраними критеріями, призначення доступу до однієї або більше груп для певного комп'ютера клієнта, запис змін даних кожної з груп у відповідний файл модифікації, передачу до комп'ютерної системи клієнта, що має локальну базу даних, файла модифікації, який містить вибрану частину даних від принаймні однієї з...
Попередній патент: Спосіб виробництва біомаси та фотобіореактор для культивування фототрофних або міксотрофних організмів або клітин
Наступний патент: Убудовуваний тензометричний датчик
Випадковий патент: Спосіб вирощування картоплі у весняному садінні