Гірорушій обертального руху
Формула / Реферат
Гиродвижитель безопорного вращательного движения, содержащий спаренную систему гироскопов, расположенных в одной плоскости, вращающихся в противоположных направлениях, установленных в карданном подвесе, состоящем из двух внутренних рамок и одной общей наружной рамки, обеспечивающих гироскопам три степени свободы, в котором с указанной системой связан электромагнитный привод линейного действия, служащий для создания внешних сил, действующих в противоположных направлениях, что позволяет получить направленное прецессионное вращение системы.
Текст
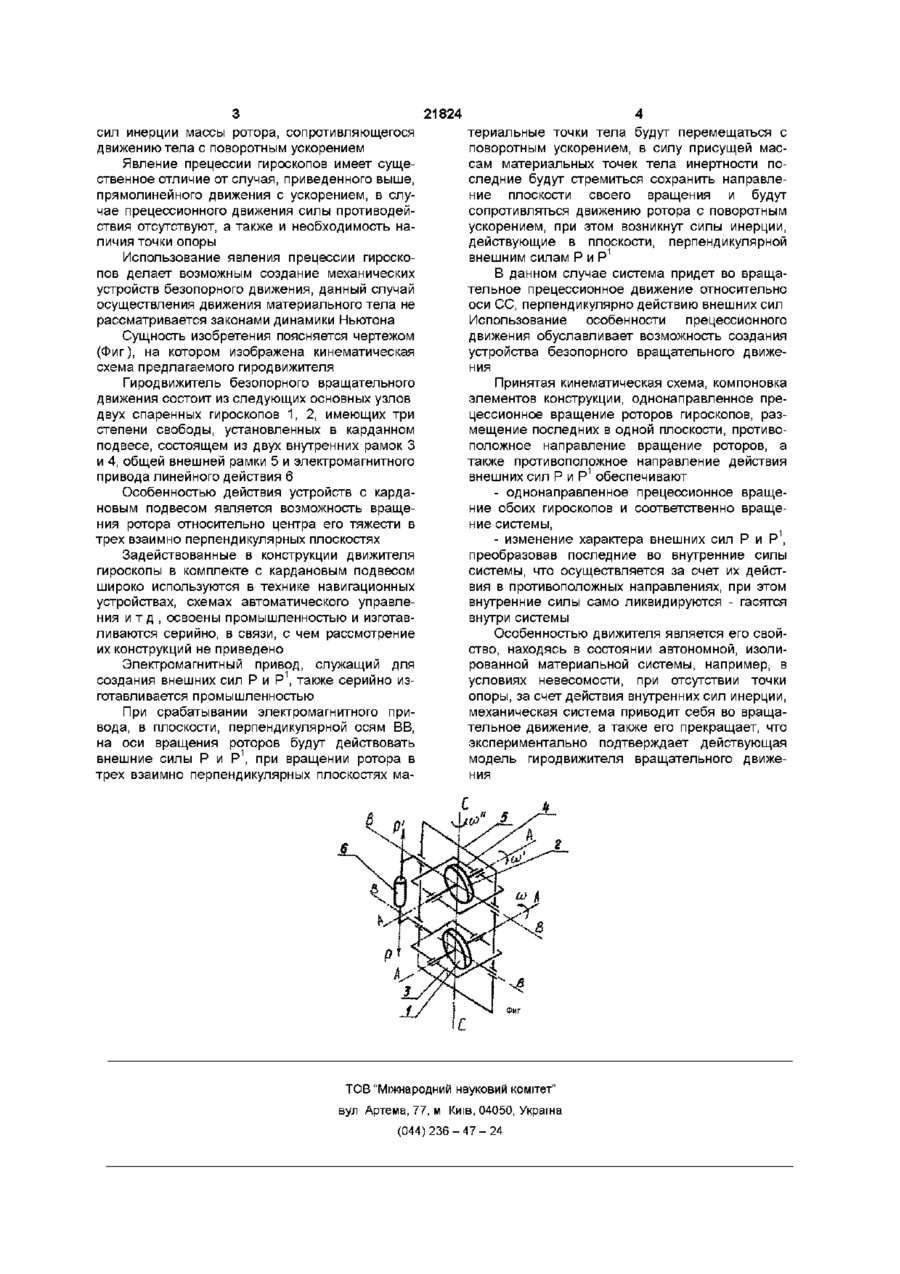
Гиродвижитель безопорного вращательного движения, содержащий спаренную систему гироскопов, расположенных в одной плоскости, вра Гиродвижитель относится к космической технике и предназначен для использования в качестве силового привода, действующего в условиях невесомости и отсутствия точки опоры Он может быть использован также в условиях наличия сил тяготения, в случаях, когда использование традиционной точки опоры "Земля" нецелесообразно или невозможно Согласно законам динамики Ньютона материальное тело может изменить свое механическое состояние, в том числе и вращательное движение, только в результате действия внешних сил, возникающих вследствие взаимодействия материальных тел, при этом возникают силы противодействия и обязательным условием является наличие точки опоры, направление ускорения и движения в данном случае лежат на одной прямой, по линии действия внешней силы Из приведенного следует при прямолинейном движении тела с ускорением, наличие точки опоры делает невозможным создание механических устройств безопорного движения В качестве приводных устройств в условиях невесомости используются двигатели реактивного типа, действующие за счет сжигания энергоносителей, однако, в данном случае принцип действия движителя основан на действии сил реакции истечения газов Аналогов предлагаемому объекту, т е приводных механических устройств, действующих в режиме безопорного движения, в том числе в условиях невесомости, не существует щающихся в противоположных направлениях, установленных в карданном подвесе, состоящем из двух внутренних рамок и одной общей наружной рамки, обеспечивающих гироскопам три степени свободы, в котором с указанной системой связан электромагнитный привод линейного действия, служащий для создания внешних сил, действующих в противоположных направлениях, что позволяет получить направленное прецессионное вращение системы В основу изобретения доложена задача создания привода вращательного движения, действующего в условиях невесомости, в отсутствии точки опоры, предназначенного для поворотов, вращения космических объектов, монтажных и других работ в дополнение к существующим двигателям реактивного типа Задача решается тем, что предложен гиродвижитель безопорного вращательного движения, основанного на явлении прецессии гироскопов и особенности вращения оси ротора гироскопа перпендикулярно действию внешних сил, содержащий спаренную систему гироскопов, расположенных в одной плоскости, вращающихся в противоположных направлениях, установленных в карданном подвесе, состоящем из двух внутренних рамок и одной общей наружной рамки, обеспечивающих гироскопам три степени свободы и связанный с системой электромагнитный привод линейного действия, служащий для создания внешних сил, действующих в противоположных направлениях, что позволяет получить, соответственно, направленное прецессионное вращение системы В предлагаемом гиродвижителе внешние силы трансформируются во внутренние и гасятся в системе, что исключает необходимость наличия точки опоры при движении материальной системы с ускорением Прецессионное движение гироскопов возникает при вращении ротора в трех взаимно перпендикулярных плоскостях, вследствие действия о 0 0 21824 сил инерции массы ротора, сопротивляющегося движению тела с поворотным ускорением Явление прецессии гироскопов имеет существенное отличие от случая, приведенного выше, прямолинейного движения с ускорением, в случае прецессионного движения силы противодействия отсутствуют, а также и необходимость наличия точки опоры Использование явления прецессии гироскопов делает возможным создание механических устройств безопорного движения, данный случай осуществления движения материального тела не рассматривается законами динамики Ньютона Сущность изобретения поясняется чертежом (Фиг), на котором изображена кинематическая схема предлагаемого гиродвижителя Гиродвижитель безопорного вращательного движения состоит из следующих основных узлов двух спаренных гироскопов 1, 2, имеющих три степени свободы, установленных в карданном подвесе, состоящем из двух внутренних рамок 3 и 4, общей внешней рамки 5 и электромагнитного привода линейного действия 6 Особенностью действия устройств с кардановым подвесом является возможность вращения ротора относительно центра его тяжести в трех взаимно перпендикулярных плоскостях Задействованные в конструкции движителя гироскопы в комплекте с кардановым подвесом широко используются в технике навигационных устройствах, схемах автоматического управления и т д , освоены промышленностью и изготавливаются серийно, в связи, с чем рассмотрение их конструкций не приведено Электромагнитный привод, служащий для создания внешних сил Р и Р1, также серийно изготавливается промышленностью При срабатывании электромагнитного привода, в плоскости, перпендикулярной осям ВВ, на оси вращения роторов будут действовать внешние силы Р и Р1, при вращении ротора в трех взаимно перпендикулярных плоскостях ма 4 териальные точки тела будут перемещаться с поворотным ускорением, в силу присущей массам материальных точек тела инертности последние будут стремиться сохранить направление плоскости своего вращения и будут сопротивляться движению ротора с поворотным ускорением, при этом возникнут силы инерции, действующие в плоскости, перпендикулярной внешним силам Р и Р1 В данном случае система придет во вращательное прецессионное движение относительно оси СС, перпендикулярно действию внешних сил Использование особенности прецессионного движения обуславливает возможность создания устройства безопорного вращательного движения Принятая кинематическая схема, компоновка элементов конструкции, однонаправленное прецессионное вращение роторов гироскопов, размещение последних в одной плоскости, противоположное направление вращение роторов, а также противоположное направление действия внешних сил Р и Р1 обеспечивают - однонаправленное прецессионное вращение обоих гироскопов и соответственно вращение системы, - изменение характера внешних сил Р и Р1, преобразовав последние во внутренние силы системы, что осуществляется за счет их действия в противоположных направлениях, при этом внутренние силы само ликвидируются - гасятся внутри системы Особенностью движителя является его свойство, находясь в состоянии автономной, изолированной материальной системы, например, в условиях невесомости, при отсутствии точки опоры, за счет действия внутренних сил инерции, механическая система приводит себя во вращательное движение, а также его прекращает, что экспериментально подтверждает действующая модель гиродвижителя вращательного движения ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюSupport-free gyroscopic motor for rotational movement
Автори англійськоюZhukovskyi Leonid Mykhailovych
Назва патенту російськоюБезопорный гироскопический движитель для создания вращательного движения
Автори російськоюЖуковский Леонид Михайлович
МПК / Мітки
МПК: G01C 19/00, B64G 1/28
Мітки: руху, обертального, гірорушій
Код посилання
<a href="https://ua.patents.su/2-21824-girorushijj-obertalnogo-rukhu.html" target="_blank" rel="follow" title="База патентів України">Гірорушій обертального руху</a>
Учбовий прилад для демонстрування законів обертального руху
Номер патенту: 18738
Опубліковано: 25.12.1997
Автори: Водолазська Олена Георгіївна, Іскрицький Вячеслав Михайлович
МПК: G09B 23/08
Мітки: демонстрування, прилад, учбовий, руху, законів, обертального
Формула / Реферат:
Учебный прибор для демонстрации законов вращательного движения, содержащий основание и привод, кинематически связанную с приводом и размещенную на основании механическую систему вращения, состоящую из центрального валика и центробежных грузов, связанных с центральным валиком посредством рычагов, а также средство регистрации, отличающийся тем, что механическая система вращения снабжена радиальными направляющими для размещения в них...
Прилад для демонстрації законів обертального руху
Номер патенту: 665
Опубліковано: 15.12.1993
Автор: Поздняков Леонтій Костантинович
МПК: G09B 23/08
Мітки: законів, руху, обертального, прилад, демонстрації
Формула / Реферат:
Формула изобретения Прибор для демонстрации законов вращательного движения, содержащий штангу, связанную с приводным механизмом, установленный на ней полый стержень и тело, связанное с динамометром тросом, проходящим через полый стержень.отличающийся тем, что, с целью повышения наглядности, он имеет механизмы для приведения тела в сложное планетарное движение, штанга выполнена из нескольких частей, при этом соседние концы одной из...
Пристрій для перетворення обертального руху в зворотно-поступальний
Номер патенту: 5086
Опубліковано: 28.12.1994
Автор: Кравченко Федір Васильович
МПК: F16H 19/00
Мітки: обертального, пристрій, руху, зворотно-поступальний, перетворення
Формула / Реферат:
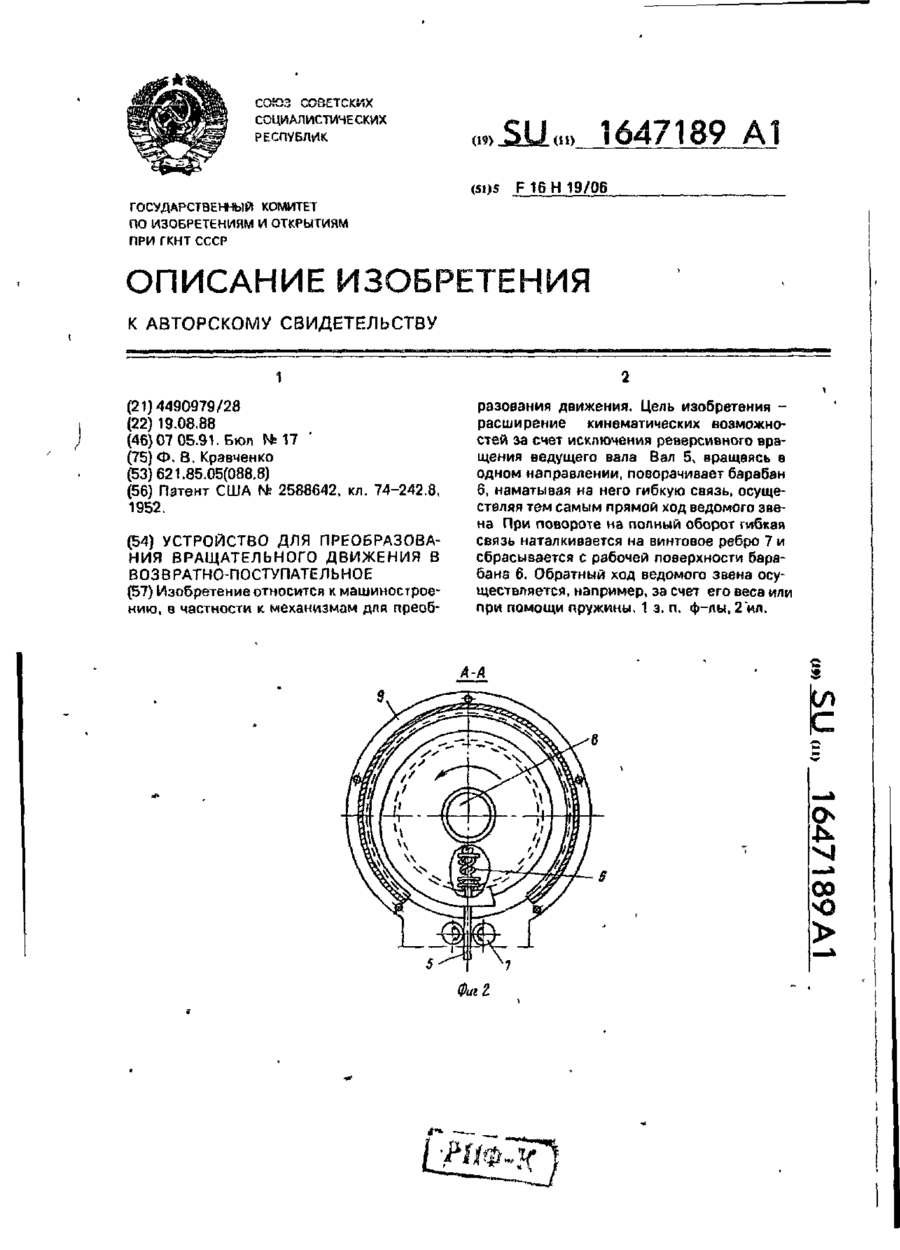
1. Устройство для преобразования вращательного движения в возвратно-поступательное, содержащее ведущее и ведомое звенья и охватывающую ведущее звено гибкую связь, отличающееся тем, что, с целью расширения кинематических возможностей, ведущее звено выполнено со сбрасывающим гибкую связь винтовым ребром и двумя соединенными последним фланцами, из которых один с плавно изменяющейся против хода вращения от максимальной у ребра до уровня...
Долото для обертального буріння
Номер патенту: 54
Опубліковано: 30.04.1993
Автори: Краснік Вячеслав Григорович, Свешніков Ігор Аркадійович, Олейніков Борис Андрійович
МПК: E21B 10/46
Мітки: долото, обертального, буріння
Формула / Реферат:
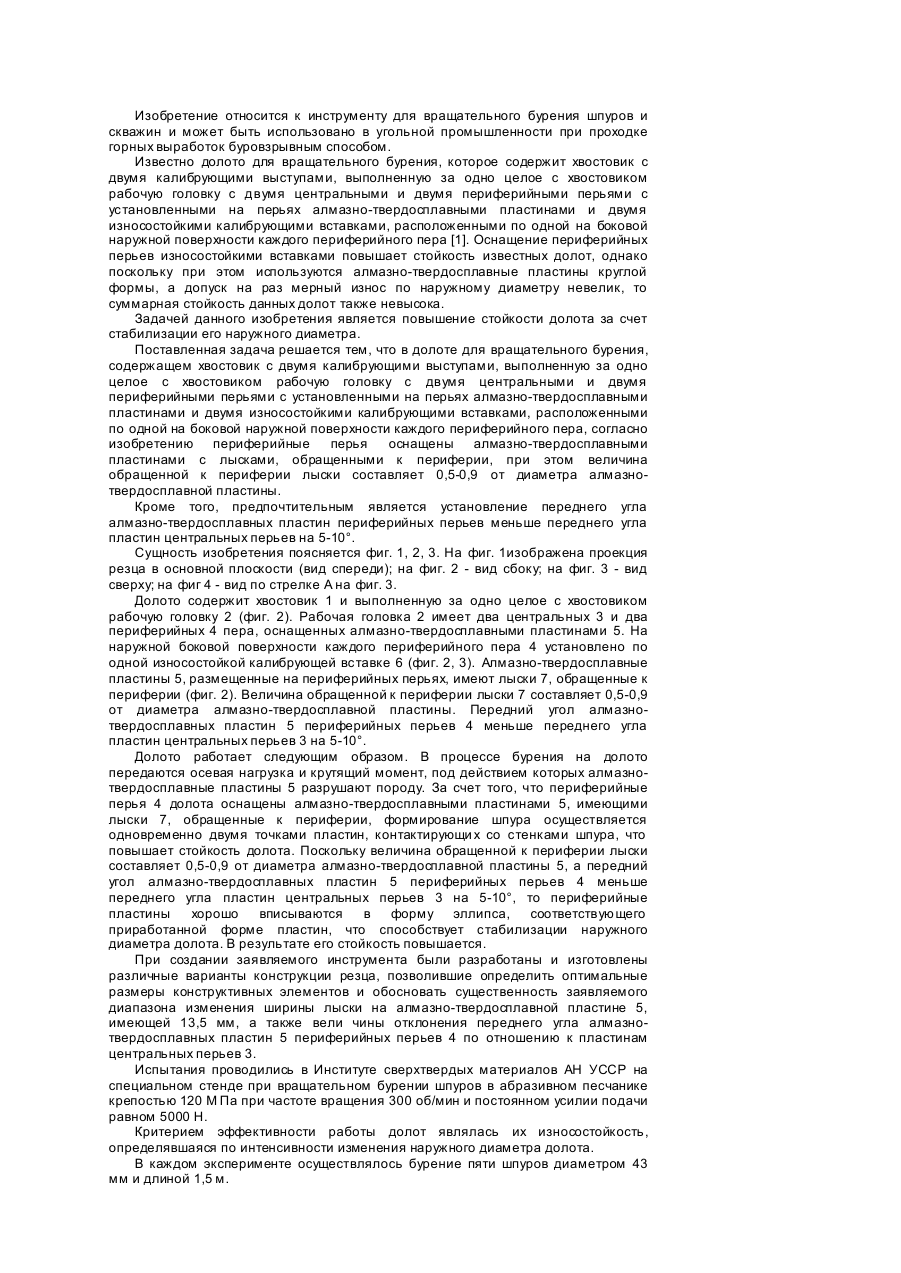
1. Долото для вращательного бурения, содержащее хвостовик с двумя калибрующими выступами, выполненную за одно целое с хвостовиком рабочую головку с двумя центральными и двумя периферийными перьями с установленными на перьях алмазно-твердосплавными пластинами и двумя износостойкими калибрующими вставками, расположенными по одной на боковой наружной поверхности каждого периферийного пера, отличающееся тем, что периферийные перья оснащены...
Спосіб дослідження руху тіл
Номер патенту: 18510
Опубліковано: 25.12.1997
Автори: Орищин Юрій Михайлович, Савчин Володимир Павлович, Вайданич Василь Іванович
МПК: G09B 23/08
Мітки: руху, дослідження, тіл, спосіб
Формула / Реферат:
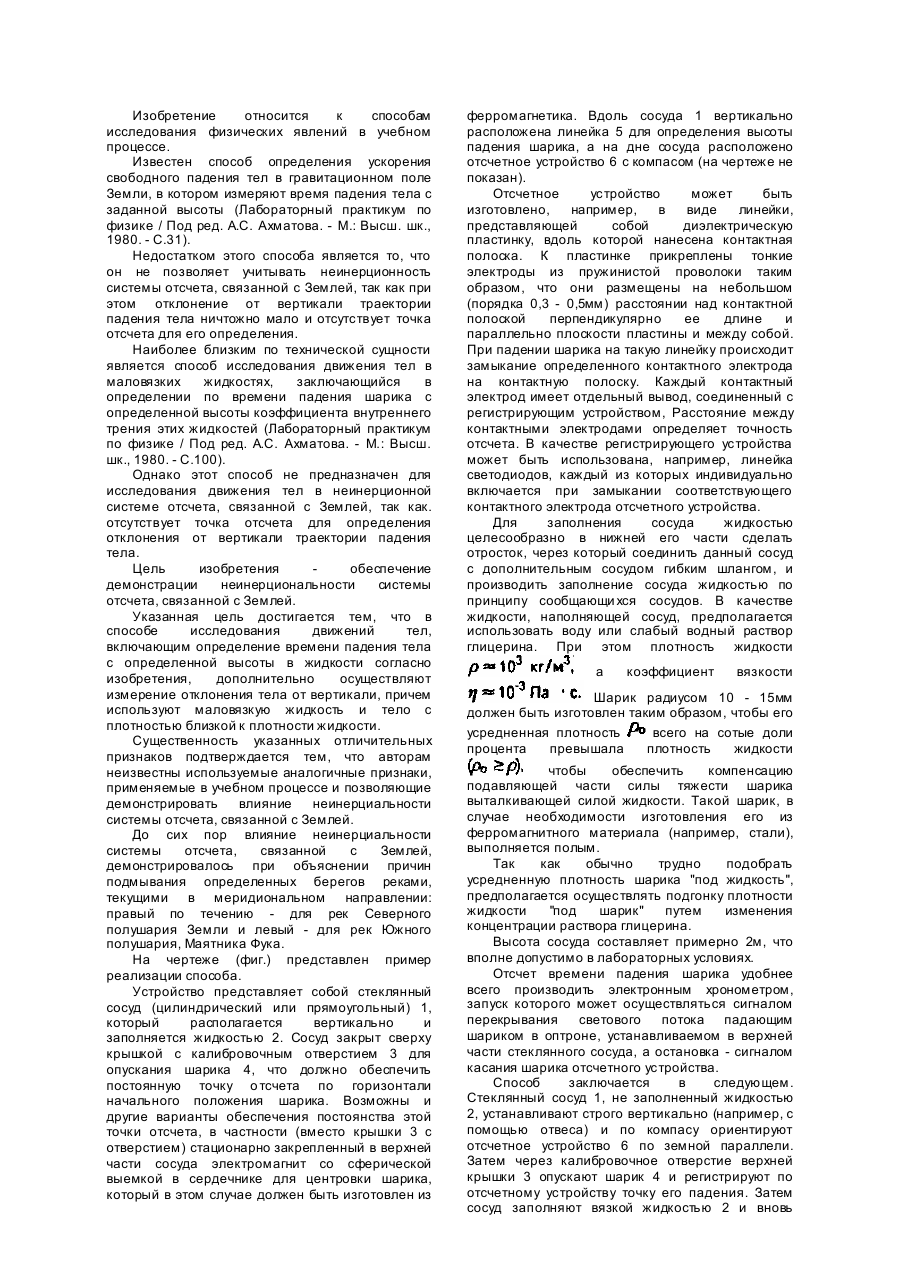
Способ исследования движения тел, включающий определение времени падения тела с определенной высоты в жидкости, отличающийся тем, что дополнительно осуществляют измерение отклонения тела от вертикали, причем используют маловязкую жидкость и тело с плотностью, близкой к плотности жидкости.
Попередній патент: Роликова дошка типу “серфінг”
Наступний патент: Спосіб одержання твердих поживних середовищ
Випадковий патент: Контактний теплообмінник