Ультразвуковий рівнемір
Номер патенту: 24121
Опубліковано: 25.06.2007
Автори: Томсон Андрій Владиславович, Стенцель Йосип Іванович
Формула / Реферат
Ультразвуковий рівнемір, що містить п'єзокерамічний випромінювач, підсилювач, компаратор, джерело опорної напруги, мікроконтролер, регульоване джерело імпульсів збудження та блок обробки інформації та індикації, який відрізняється тим, що мікроконтролер у залежності від рівня контрольованого середовища змінює амплітуду вихідних імпульсів збудження, які подаються на п'єзокерамічний випромінювач.
Текст
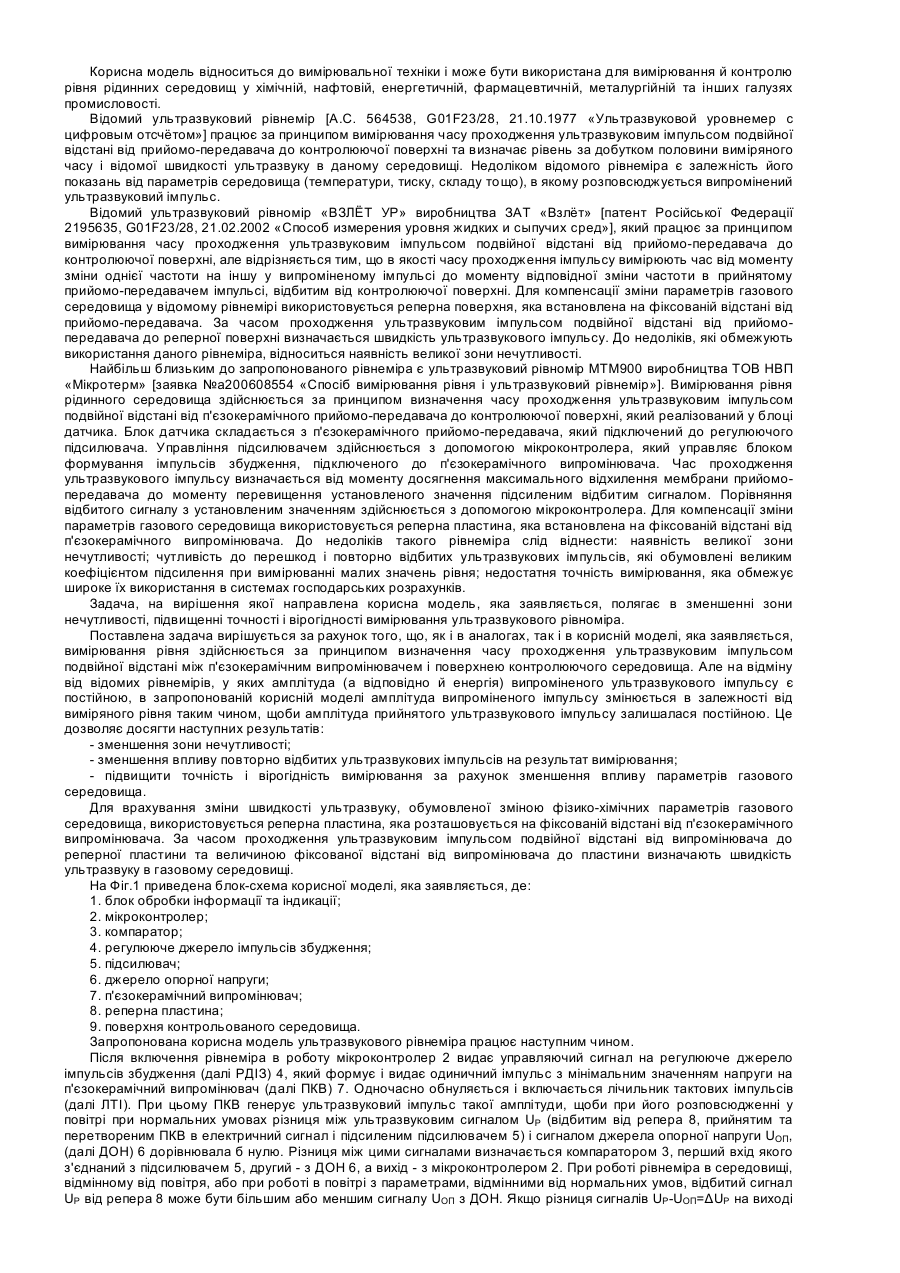
Корисна модель відноситься до вимірювальної техніки і може бути використана для вимірювання й контролю рівня рідинних середовищ у хімічній, нафтовій, енергетичній, фармацевтичній, металургійній та інших галузях промисловості. Відомий ультразвуковий рівнемір [А.С. 564538, G01F23/28, 21.10.1977 «Ультразвуковой уровнемер с цифровым отсчётом»] працює за принципом вимірювання часу проходження ультразвуковим імпульсом подвійної відстані від прийомо-передавача до контролюючої поверхні та визначає рівень за добутком половини виміряного часу і відомої швидкості ультразвуку в даному середовищі. Недоліком відомого рівнеміра є залежність його показань від параметрів середовища (температури, тиску, складу тощо), в якому розповсюджується випромінений ультразвуковий імпульс. Відомий ультразвуковий рівномір «ВЗЛЁТ УР» виробництва ЗАТ «Взлёт» [патент Російської Федерації 2195635, G01F23/28, 21.02.2002 «Способ измерения уровня жидких и сыпучих сред»], який працює за принципом вимірювання часу проходження ультразвуковим імпульсом подвійної відстані від прийомо-передавача до контролюючої поверхні, але відрізняється тим, що в якості часу проходження імпульсу вимірюють час від моменту зміни однієї частоти на іншу у випроміненому імпульсі до моменту відповідної зміни частоти в прийнятому прийомо-передавачем імпульсі, відбитим від контролюючої поверхні. Для компенсації зміни параметрів газового середовища у відомому рівнемірі використовується реперна поверхня, яка встановлена на фіксованій відстані від прийомо-передавача. За часом проходження ультразвуковим імпульсом подвійної відстані від прийомопередавача до реперної поверхні визначається швидкість ультразвукового імпульсу. До недоліків, які обмежують використання даного рівнеміра, відноситься наявність великої зони нечутливості. Найбільш близьким до запропонованого рівнеміра є ультразвуковий рівномір МТМ900 виробництва ТОВ НВП «Мікротерм» [заявка №а200608554 «Спосіб вимірювання рівня і ультразвуковий рівнемір»]. Вимірювання рівня рідинного середовища здійснюється за принципом визначення часу проходження ультразвуковим імпульсом подвійної відстані від п'єзокерамічного прийомо-передавача до контролюючої поверхні, який реалізований у блоці датчика. Блок датчика складається з п'єзокерамічного прийомо-передавача, який підключений до регулюючого підсилювача. Управління підсилювачем здійснюється з допомогою мікроконтролера, який управляє блоком формування імпульсів збудження, підключеного до п'єзокерамічного випромінювача. Час проходження ультразвукового імпульсу визначається від моменту досягнення максимального відхилення мембрани прийомопередавача до моменту перевищення установленого значення підсиленим відбитим сигналом. Порівняння відбитого сигналу з установленим значенням здійснюється з допомогою мікроконтролера. Для компенсації зміни параметрів газового середовища використовується реперна пластина, яка встановлена на фіксованій відстані від п'єзокерамічного випромінювача. До недоліків такого рівнеміра слід віднести: наявність великої зони нечутливості; чутливість до перешкод і повторно відбитих ультразвукових імпульсів, які обумовлені великим коефіцієнтом підсилення при вимірюванні малих значень рівня; недостатня точність вимірювання, яка обмежує широке їх використання в системах господарських розрахунків. Задача, на вирішення якої направлена корисна модель, яка заявляється, полягає в зменшенні зони нечутливості, підвищенні точності і вірогідності вимірювання ультразвукового рівноміра. Поставлена задача вирішується за рахунок того, що, як і в аналогах, так і в корисній моделі, яка заявляється, вимірювання рівня здійснюється за принципом визначення часу проходження ультразвуковим імпульсом подвійної відстані між п'єзокерамічним випромінювачем і поверхнею контролюючого середовища. Але на відміну від відомих рівнемірів, у яких амплітуда (а відповідно й енергія) випроміненого ультразвукового імпульсу є постійною, в запропонованій корисній моделі амплітуда випроміненого імпульсу змінюється в залежності від виміряного рівня таким чином, щоби амплітуда прийнятого ультразвукового імпульсу залишалася постійною. Це дозволяє досягти наступних результатів: - зменшення зони нечутливості; - зменшення впливу повторно відбитих ультразвукових імпульсів на результат вимірювання; - підвищити точність і вірогідність вимірювання за рахунок зменшення впливу параметрів газового середовища. Для врахування зміни швидкості ультразвуку, обумовленої зміною фізико-хімічних параметрів газового середовища, використовується реперна пластина, яка розташовується на фіксованій відстані від п'єзокерамічного випромінювача. За часом проходження ультразвуковим імпульсом подвійної відстані від випромінювача до реперної пластини та величиною фіксованої відстані від випромінювача до пластини визначають швидкість ультразвуку в газовому середовищі. На Фіг.1 приведена блок-схема корисної моделі, яка заявляється, де: 1. блок обробки інформації та індикації; 2. мікроконтролер; 3. компаратор; 4. регулююче джерело імпульсів збудження; 5. підсилювач; 6. джерело опорної напруги; 7. п'єзокерамічний випромінювач; 8. реперна пластина; 9. поверхня контрольованого середовища. Запропонована корисна модель ультразвукового рівнеміра працює наступним чином. Після включення рівнеміра в роботу мікроконтролер 2 видає управляючий сигнал на регулююче джерело імпульсів збудження (далі РДІЗ) 4, який формує і видає одиничний імпульс з мінімальним значенням напруги на п'єзокерамічний випромінювач (далі ПКВ) 7. Одночасно обнуляється і включається лічильник тактових імпульсів (далі ЛТІ). При цьому ПКВ генерує ультразвуковий імпульс такої амплітуди, щоби при його розповсюдженні у повітрі при нормальних умовах різниця між ультразвуковим сигналом UР (відбитим від репера 8, прийнятим та перетвореним ПКВ в електричний сигнал і підсиленим підсилювачем 5) і сигналом джерела опорної напруги UОП, (далі ДОН) 6 дорівнювала б нулю. Різниця між цими сигналами визначається компаратором 3, перший вхід якого з'єднаний з підсилювачем 5, другий - з ДОН 6, а вихід - з мікроконтролером 2. При роботі рівнеміра в середовищі, відмінному від повітря, або при роботі в повітрі з параметрами, відмінними від нормальних умов, відбитий сигнал UР від репера 8 може бути більшим або меншим сигналу UОП з ДОН. Якщо різниця сигналів UР-UОП=ΔUР на виході компаратора 3 більша або дорівнює нулю, то мікроконтролер 2 зупиняє ЛТІ і записує у пам'ять кількість відрахованих імпульсів NP і різницю сигналів ΔUР. Якщо різниця сигналів ΔUР менша нуля, то мікроконтролер зупиняє ЛТІ після досягнення кількості імпульсів NР max, що відповідає часу проходження ультразвуковим імпульсом відстані, яка в 4 рази перевищує відстань від репера до ПКВ у повітрі при нормальних умовах. Мікроконтролер видає управляючий сигнал на РДІЗ, який формує та видає на ПКВ імпульс збудження UЗ.Р., який більший попереднього на ΔUЗ. Одночасно обнуляється та включається ЛТІ. Якщо мікроконтролер одержує різницю сигналів ΔUР, яка є більшою або дорівнює нулю до досягнення ЛТІ кількості імпульсів NР max, то мікроконтролер зупиняє ЛТІ і записує в пам'ять кількість імпульсів NР, різницю сигналів ΔUР та управляючий сигнал для формування РДІЗ імпульсу збудження UЗ.Р.. У противному разі мікроконтролер виконує попередню послідовність дій. На цьому закінчується перший етап роботи рівнеміра визначення відбитого сигналу від репера. Другий етап роботи рівнеміра починається з того, що визначається величина відбитого сигналу від поверхні контрольованого середовища 9. Мікроконтролер 2 обнуляє та включає ЛТІ, подає управляючий сигнал на РДІЗ 4, який формує та подає на ПКВ 7 імпульс збудження UЗ.П.., який більший попереднього імпульсу збудження UЗ.Р. на величину ΔU3. Ультразвукові імпульси (перший відбитий від репера 8, а другий від поверхні контрольованого середовища 9) приймаються та перетворюються ПКВ відповідно в електричні сигнали UР та UП і підсилюються підсилювачем 2. Якщо різниця сигналів UП-UОП=ΔUП на виході компаратора 3 стане більшою або дорівнює нулю, то мікроконтролер зупиняє ЛТІ і записує в пам'ять кількість імпульсів NП, різницю сигналів ΔUП та управляючий сигнал для формування РДІЗ імпульсу збудження UЗ.П.. Мікроконтролер сприймає сигнал на виході компаратора як різницю сигналів ΔUП , більшу або рівну нулю, тільки коли значення ЛТІ більше, ніж NР, у двох випадках: 1. якщо мікроконтролер отримав попередню різницю сигналів з виходу компаратора, більшу 0, коли кількість імпульсів ЛТІ була менша, ніж NР; 2. якщо мікроконтролер отримав першу різницю сигналів з виходу компаратора, більшу 0, коли кількість імпульсів ЛТІ була більша, ніж NР; Якщо різниця сигналів ΔUП, менша нуля, то мікроконтролер зупиняє ЛТІ після досягнення ним кількості імпульсів NП max., яка відповідає часу проходження ультразвуковим імпульсом відстані, котра в 4 рази перевищує відстані вимірюваної рівнеміром у повітрі при нормальних умовах і максимальній амплітуді імпульсу збудження UЗ.П.. При цьому мікроконтролер записує у пам'ять величину управляючого сигналу для формування РДІЗ імпульсу збудження UЗ.П.. Після визначення відбитого сигналу від репера UР та відбитого сигналу від поверхні UП контрольованого середовища, рівнемір переходить до циклічного режиму роботи. При цьому режимі роботи вимірювальною схемою рівнеміра аналізуються значення різниць сигналів ΔUР і ΔUП. Якщо одержані різниці сигналів ΔUР і ΔUП дорівнюють або близькі до нуля, то мікроконтролер передає в блок обробки інформації та індикації (БОІ) 1 значення лічильника NР і NП, і переходить до наступного циклу роботи. У БОІ розраховується відстань до контролюючої поверхні hП і рівень LХ рідини в апараті за формулами: N hП = hP П , LX=H-hП , NP де hП - відстань від ПКВ до поверхні контролюючого середовища, hР - задана відстань від ПКВ до репера. Значення hП і L Х записуються в БОІ. Якщо різниці сигналів ΔUР чи ΔUП менші нуля, то мікроконтролер переходить до відслідковування відбитого сигналу від репера і уводить компенсацію на величину впливу зміни параметрів газового середовища. Як видно з вищенаведеного, корисна модель, яка заявляється, дозволяє отримати закладені заявником технічні результати. Проведений аналіз патентної літератури показав, що корисна модель, яка заявляється, відповідає вимогам «новизна».
ДивитисяДодаткова інформація
Назва патенту англійськоюUltrasonic device for measuring level
Автори англійськоюStentsel Yosyp Ivanovych
Назва патенту російськоюУльтразвуковое устройство для измерения уровня
Автори російськоюСтенцель Иосиф Иванович
МПК / Мітки
МПК: G01F 23/28
Мітки: рівнемір, ультразвуковий
Код посилання
<a href="https://ua.patents.su/2-24121-ultrazvukovijj-rivnemir.html" target="_blank" rel="follow" title="База патентів України">Ультразвуковий рівнемір</a>
Ультразвуковий рівнемір

Номер патенту: 33879
Опубліковано: 15.02.2001
Автори: Тертишний Євген Віталійович, Лазебний Віктор Степанович
МПК: G01F 23/28
Мітки: ультразвуковий, рівнемір
Текст:
...входом тригера 9, об'єднаним із входами обнуління першого 10 і другого 11 лічильників пристрою керування настроюванням 6. Вихід тригера 9 пристрою керування настроюванням 6 з'єднаний з другим керуючим входом приймача 16 пристрою прийому-передачи 2 та з другим входом логічного елемента І 8 пристрою керування настроюванням 6. Вихід логічного елемента І 8 з'єднаний з лічильним входом першого лічильника 10, інформаційний вихід якого з'єднаний з...
Поплавковий рівнемір
Номер патенту: 74374
Опубліковано: 15.12.2005
Автори: Дульский Микола Васильович, Березуцький Михайло Миколаєвич
МПК: G01F 23/30
Мітки: поплавковий, рівнемір
Формула / Реферат:
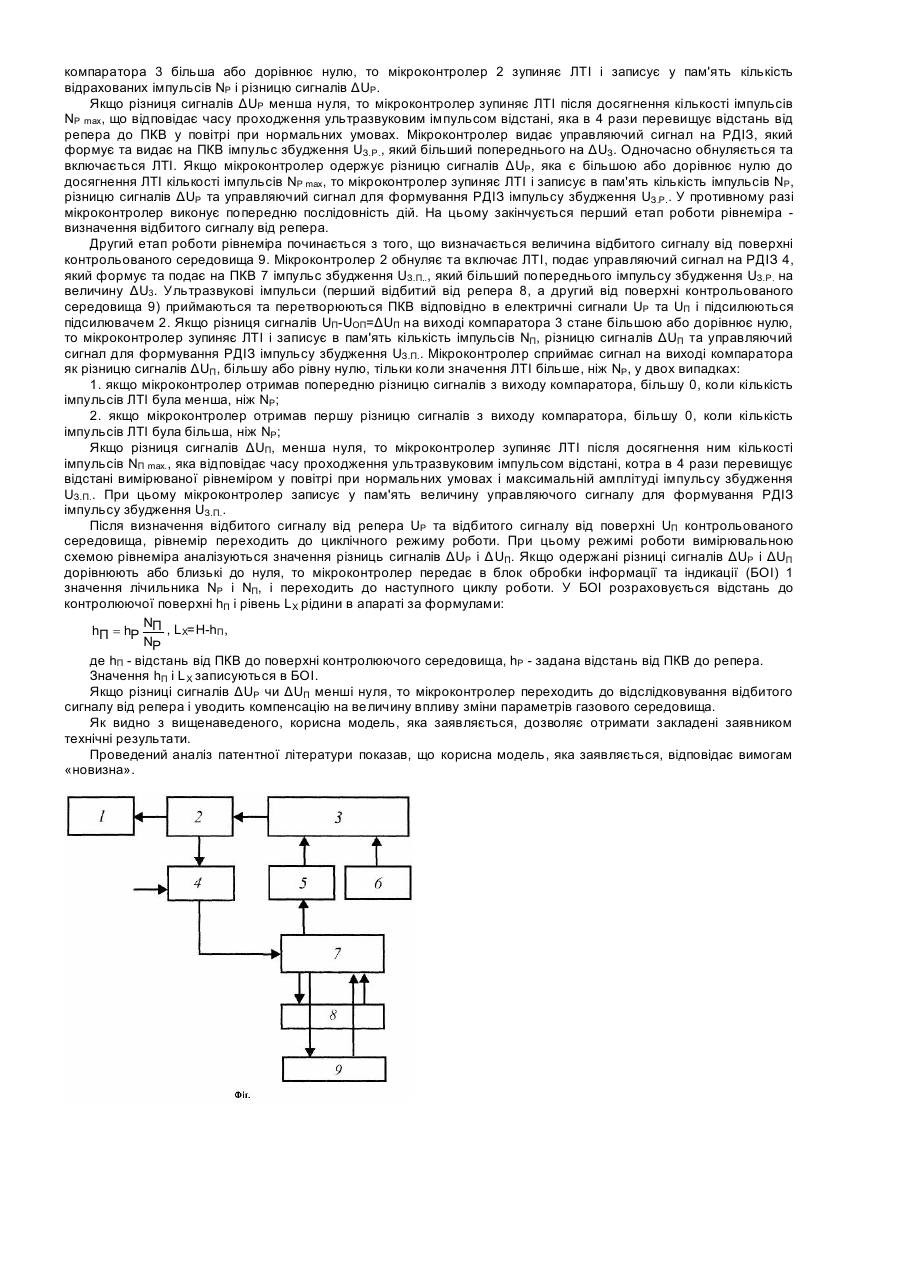
Поплавковий рівнемір, який складається з металевої гнучкої мірної стрічки з поділками, один кінець якої прикріплений на валу, а другий - до тягаря й поплавкової камери, який відрізняється тим, що на гнучкій мірній стрічці встановлений з можливістю переміщення вздовж неї фіксатор рівня рідини, виконаний у вигляді постійного магніту.
Рівнемір
Номер патенту: 18005
Опубліковано: 17.06.1997
Автори: Погребняк Олександр Олександрович, Щурик Володимир Олександрович, Серілко Леонід Степанович, Наконечний Володимир Васильович, Войтович Леонід Володимирович
МПК: G01F 23/30
Мітки: рівнемір
Формула / Реферат:
Рівнемір, що включає поплавок, встановлений на вертикальних напрямляючих і кінематично зв'язаний мірною стрічкою з барабаном, механічно з'єднаним з привідним двигуном, індикаторний блок, що закріплений з зовнішнього боку ємності і фіксатор поплавка, який відрізняється тим, що фіксатор виконаний у вигляді клина, закріпленого на мірній стрічці і двох роликів, встановлених на поплавку, з можливістю горизонтального переміщення останніх.
Дискретний рівнемір
Номер патенту: 13857
Опубліковано: 25.04.1997
Автори: Політучий Олександр Іванович, Миргородський Михайло Мефодієвич
МПК: G01F 23/24
Мітки: рівнемір, дискретний
Формула / Реферат:
Дискретний рівнемір рідини, вміщуючий поплавок. немагнітну вимірювальну трубу, реверсивний електронний лічильник з електронним комутатором на вході та блоком індикації рівня на виході, який відрізняється тим, що в середині рухомої немагнітності вимірювальної труби, з'єднаної з поплавком, по всій її висоті разміщені пасивні металеві елементи з кроком, рівним дискретності вимірювання, а зовні на неї надіті з зазором нерухомо тороїдальні...
Оптичний рівнемір
Номер патенту: 72626
Опубліковано: 15.03.2005
Автори: Березуцький Михайло Миколайович, Бондаренко Вячеслав Мартіянович, Дульский Микола Васильович
МПК: G01F 23/30, G01F 23/00
Формула / Реферат:
Оптичний рівнемір, який складається з виготовленого з немагнітного матеріалу порожнистого корпусу, на який насаджена поплавкова камера, а усередині корпусу розміщений кутовий відбивач, оптично зв'язаний з робочим плечем інтерферометра, сигнал з виходу якого надходить у блок обробки сигналу і індикації, який відрізняється тим, що корпус виконаний герметичним, а кутовий відбивач установлений на підкладку, рухомо закріплену на струні, при цьому...
Попередній патент: Застосування препарату фенадек як профілактично-лікувального засобу при цестодозах риб
Наступний патент: Спосіб улаштування збірно-монолітного залізобетонного перекриття
Випадковий патент: Пристрій для контролю ресурсу повітряних високовольтних вимикачів