Спосіб вимірювання інваріантного коефіцієнта стійкості чотириполюсника
Номер патенту: 16644
Опубліковано: 15.08.2006
Автори: Огородник Костянтин Володимирович, Філинюк Микола Антонович, Булига Ігор Володимирович
Формула / Реферат
Спосіб вимірювання інваріантного коефіцієнта стійкості чотириполюсника, що включає вимірювання імітансної матриці W-параметрів чотириполюсника та подальший розрахунок інваріантного коефіцієнта стійкості, який відрізняється тим, що вимірюють тільки два значення вхідного та одне значення вихідного імітансів чотириполюсника при відповідно двох різних, але довільних фіксованих значеннях імітансу навантаження та довільному фіксованому значенні імітансу генератора, за формулами:
![]()
![]()
![]()
де Wвх1, Wвх2 - значення вхідного імітансу чотириполюсника при значеннях Wн1,Wн2 імітансу навантаження відповідно;
Wвих1 - значення вихідного імітансу чотириполюсника при значенні імітансу генератора ![]() ,
,
розраховують комплексні значення імітансних параметрів W11, W22 та W12W21, виділяють їх дійсні складові за формулою:
![]()
розраховують модуль добутку W12W21 за формулою:
![]()
розраховують значення інваріантного коефіцієнта стійкості чотириполюсника.
Текст
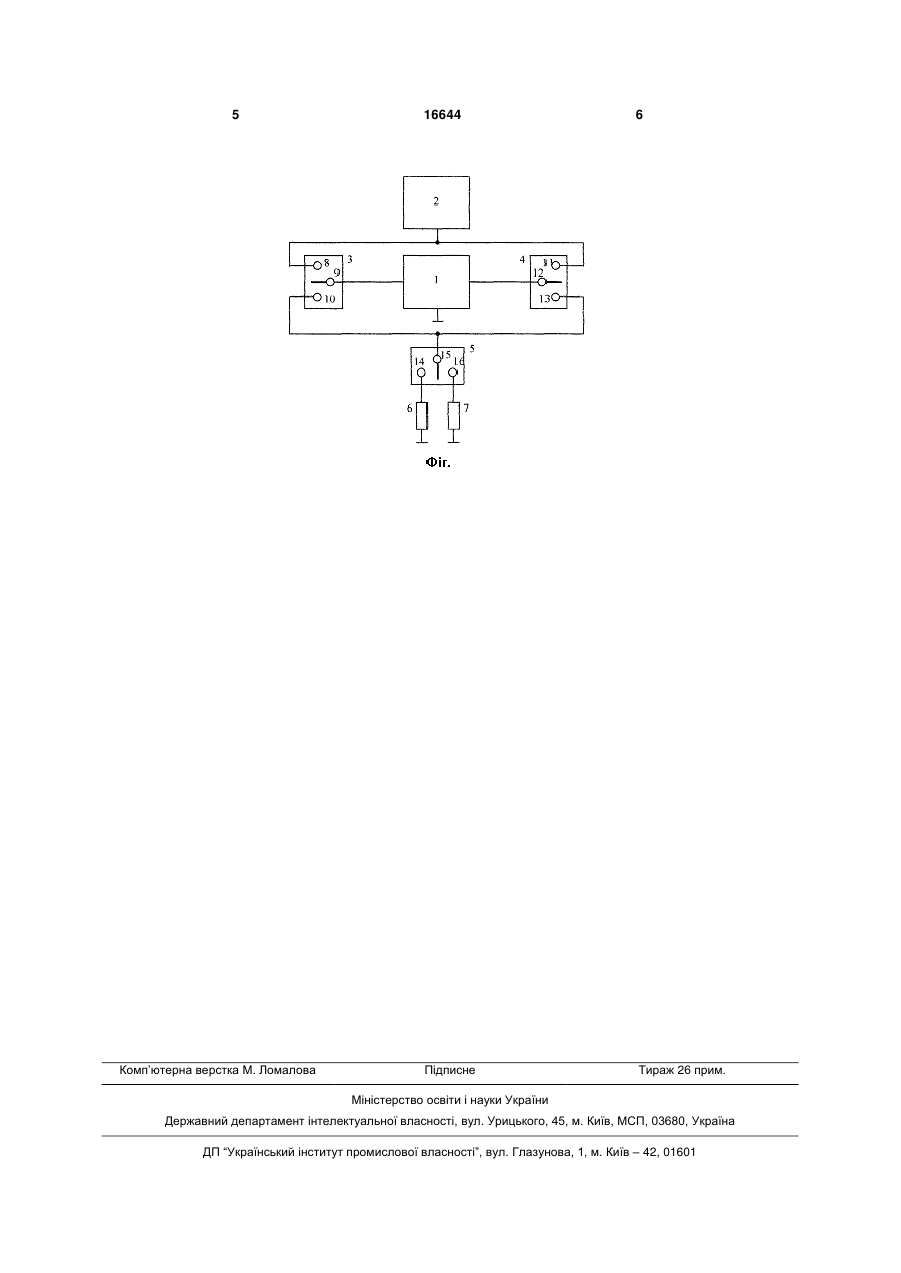
Спосіб вимірювання інваріантного коефіцієнта стійкості чотириполюсника, що включає вимірювання імітансної матриці W-параметрів чотириполюсника та подальший розрахунок інваріантного коефіцієнта стійкості, який відрізняється тим, що вимірюють тільки два значення вхідного та одне значення вихідного імітансів чотириполюсника при відповідно двох різних, але довільних фіксованих значеннях імітансу навантаження та довільному фіксованому значенні імітансу генератора, за формулами: 2 3 16644 4 ходу в діапазоні НВЧ при вимірюванні імітансних стійкості чотириполюсника, що включає вимірюпараметрів. вання імітансної матриці W-параметрів чотирипоВ основу корисної моделі поставлено задачу люсника та подальший розрахунок інваріантного створення способу вимірювання інваріантного кокоефіцієнту стійкості, спочатку вимірюють тільки ефіцієнта стійкості чотириполюсника, в якому за два значення вхідного та одне значення вихідного рахунок використання способу вимірювання імітаімітансів чотириполюсника при відповідно двох нсних параметрів чотириполюсника, що не потрерізних але довільних фіксованих значеннях імітанбує забезпечення режимів двостороннього узгосу навантаження та довільному фіксованому знадження, короткого замкнення чи холостого ходу, ченні імітансу генератора, за формулами [Патент підвищується точність визначення інваріантного України на корисну модель №5780 опубл. коефіцієнту стійкості чотириполюсника. 15.03.05, б.№3, 2005р.] Поставлена задача вирішується тим, що в способі вимірювання інваріантного коефіцієнта Wвх1 вх2( Wн1 Wн2) Wг1( Wвх1( Wн1 Wвих1) Wвх2( Wн2 Wвих1)) W W11 , (2) Wг1( Wн1 Wн2) Wвх2( Wн1 Wвих1) Wвх1( Wн2 Wвих1) W 22 Wг1 вих1( Wн1 Wн2) Wвх2Wн2( Wн1 Wвих1) Wвх1 н1( Wн2 Wвих1) W W , Wг1( Wн1 Wн2) Wвх2( Wн1 Wвих1) Wвх1( Wн2 Wвих1) (3) ( W г1 W вх1)( W вх1 W вх2 )( W г1 W вх2 )( W н1 W н2 )( W н1 W вих1)( W н2 W вих1) , ( W г1( W н1 W н2 ) W вх2 ( W н1 W вих1) W вх1( W н2 W вих1))2 (4) W12W 21 де Wвх1, Wвх2 - значення вхідного імітансу чотириполюсника при значеннях Wн1,Wн2 імітансу навантаження відповідно; Wвих1 - значення вихідного імітансу чотириполюсника при значенні імітансу генератора Wг1; розраховують комплексні значення імітансних параметрів W11, W22 та W12W21, виділяють їх дійсні складові, за формулою W12W 21 Re2( W12W 21) Im 2( W12W 21), розраховують модуль добутку W12W21, за формулою (1) розраховують значення інваріантного коефіцієнта стійкості чотириполюсника. Спосіб, що пропонується, в порівнянні з найближчим аналогом має суттєві відмінності - підвищену точність визначення інваріантного коефіцієнту стійкості чотириполюсника, що досягається шляхом використання способу вимірювання імітансних параметрів чотириполюсника, що не потребує забезпечення режимів двосторонньої о узгодження, короткого замкнення чи холостого ходу. На кресленні зображено структурну схему пристрою вимірювання вхідного та вихідного імітансів чотириполюсника. Пристрій для проведення вимірювань складається з чотириполюсника 1, вимірювача повних опорів 2, першого комутатора 3, другого комутатора 4, третього комутатора 5, першого відомого комплексного опору 6 та другого відомого комплексного опору 7. При цьому перший нерухомий контакт 8 першого комутатора 3 з'єднаний з виходом вимірювача повних опорів 2 та першим нерухомим контактом 11 другого комутатора 4, другий нерухомий контакт 10 першого комутатора 3 з'єднаний з рухомим контактом 15 третього комутатора 5 та другим нерухомим контактом 13 другого комутатора 4, рухомий контакт 9 першого комутатора 3 з'єднаний з входом чотириполюсника 1, рухомий контакт 12 другого комутатора 4 з'єднаний з виходом чотириполюсника 1, перший нерухомий контакт 14 третього комутатора 5 з'єднаний з першим відомим комплексним опором 6, другий нерухомий контакт 16 третього комута (5) тора 5 з'єднаний з другим відомим комплексним опором 7. Спосіб здійснюється наступним чином. В першому комутаторі 3 з'єднують контакти 8 та 9, в другому комутаторі 4 з'єднують контакти 12 та 13, в третьому комутаторі 5 з'єднують контакти 14 та 15. В цьому режимі виконують вимірювання вхідного повного опору Zвх1 чотириполюсника 1 за допомогою вимірювача повних опорів 2 при першому відомому комплексному опорі 6 навантаження Zн1. Потім в третьому комутаторі 5 з'єднують контакти 15 та 16. В цьому режимі виконують вимірювання вхідного повного опору Zвх2 чотириполюсника 1 за допомогою вимірювача повних опорів 2 при другому відомому комплексному опорі 7 навантаження Zн2. Потім в першому комутаторі 3 з'єднують контакти 9 та 10, в другому комутаторі 4 з'єднують контакти 11 та 12, в третьому комутаторі 5 з'єднують контакти 14 та 15. В цьому режимі виконують вимірювання вихідного повного опору Zвих1 чотириполюсника 1 за допомогою вимірювача повних опорів 2 при першому відомому комплексному опорі 6 генератора Zг1. За формулами (2)-(4) розраховують значення імітансних параметрів W11 W22 та W12W21 чотириполюсника 1. Виділяють дійсні складові цих параметрів ReW11, ReW22 та Re(W12W21). За формулою (5) розраховують модуль добутку W12W21. За формулою (1) розраховують значення інваріантного коефіцієнта стійкості чотириполюсника 1. 5 Комп’ютерна верстка М. Ломалова 16644 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring the invariant stability coefficient of a quadripole
Автори англійськоюOgorodnik Kostiantyn Volodymyrovych, Filyniuk Mykola Antonovych, Bulyha Ihor Volodymyrovych
Назва патенту російськоюСпособ измерения инвариантного коэффициента устойчивости четырехполюсника
Автори російськоюОгородник Константин Владимирович, Филинюк Николай Антонович, Булыга Игорь Владимирович
МПК / Мітки
МПК: G01R 27/28
Мітки: інваріантного, чотириполюсника, стійкості, спосіб, вимірювання, коефіцієнта
Код посилання
<a href="https://ua.patents.su/3-16644-sposib-vimiryuvannya-invariantnogo-koeficiehnta-stijjkosti-chotiripolyusnika.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання інваріантного коефіцієнта стійкості чотириполюсника</a>
Спосіб вимірювання нестандартної системи імітансних параметрів чотириполюсника
Номер патенту: 5780
Опубліковано: 15.03.2005
Автори: Філинюк Микола Антонович, Лазарєв Олександр Олександрович, Огородник Костянтин Володимирович
МПК: G01R 27/28
Мітки: системі, чотириполюсника, параметрів, нестандартної, спосіб, вимірювання, імітансних
Формула / Реферат:
Спосіб вимірювання нестандартної системи імітансних параметрів чотириполюсника, що включає вимірювання вхідних та вихідних імітансів чотириполюсника при різних фіксованих значеннях відповідно імітансу навантаження та імітансу генератора та подальший розрахунок імітансних параметрів , , який відрізняється...
Спосіб вимірювання параметрів чотириполюсника з використанням діаграми вольперта-смітта

Номер патенту: 11967
Опубліковано: 16.01.2006
Автори: Салех М.М. Журбан, Огородник Костянтин Володимирович, Філинюк Микола Антонович
МПК: G01R 27/28
Мітки: вольперта-смітта, параметрів, спосіб, діаграми, чотириполюсника, вимірювання, використанням
Формула / Реферат:
Спосіб вимірювання параметрів чотириполюсника з використанням діаграми Вольперта-Смітта, що включає вимірювання вхідних та вихідних імітансів чотириполюсника при різних фіксованих значеннях відповідно імітансу навантаження та імітансу генератора та подальший розрахунок імітансних параметрів W11, W22, який відрізняється тим, що вимірюють тільки два значення вхідного Wвх1, Wвх2 та одне значення вихідного Wвих1 імітансів чотириполюсника при...
Спосіб вимірювання нестандартної системи s-параметрів чотириполюсника
Номер патенту: 7267
Опубліковано: 15.06.2005
Автори: Огородник Костянтин Володимирович, Лазарєв Олександр Олександрович, Філинюк Микола Антонович
МПК: G01R 27/28
Мітки: чотириполюсника, спосіб, нестандартної, вимірювання, s-параметрів, системі
Формула / Реферат:
Спосіб вимірювання нестандартної системи S-параметрів чотириполюсника, що включає вимірювання комплексних коефіцієнтів відбиття по входу та по виходу чотириполюсника при різних фіксованих значеннях відповідно комплексних коефіцієнтів відбиття навантаження та генератора та подальший розрахунок S-параметрів S11, S22, який відрізняється тим, що спочатку вимірюють два значення комплексного коефіцієнта відбиття чотириполюсника по входу при двох...
Спосіб визначення граничної частоти потенціально-нестійкого чотириполюсника
Номер патенту: 9563
Опубліковано: 17.10.2005
Автори: Швейкіна Світлана Євгенівна, Гаврілов Дмитро Володимирович, Філинюк Микола Антонович
МПК: G01R 27/28
Мітки: граничної, потенціально-нестійкого, частоти, спосіб, визначення, чотириполюсника
Формула / Реферат:
Спосіб визначення граничної частоти потенціально-нестійкого чотириполюсника, що включає вимірювання внутрішнього інваріантного коефіцієнта стійкості KC чотириполюсника на різних частотах та подальший розрахунок граничної частоти fг, який відрізняється тим, що спочатку вимірюють одне значення внутрішнього інваріантного коефіцієнта стійкості: на частоті f1, де даний коефіцієнт менше одиниці, утворюючи на частотній залежності кривої KC(f) точку...
Спосіб вимірювання мінімально досяжного вхідного активного опору чотириполюсника
Номер патенту: 53004
Опубліковано: 15.01.2003
Автори: Гаврілов Дмитро Володимирович, Філинюк Микола Антонович
МПК: G01R 27/28
Мітки: вимірювання, чотириполюсника, мінімальної, досяжного, вхідного, опору, спосіб, активного
Формула / Реферат:
Спосіб вимірювання мінімальнодосяжного вхідного активного опору чотириполюсника, що включає подачу електромагнітних коливань постійної потужності і частоти на вхід невзаємного чотириполюсника з включеним у вхідне коло комплексним опором і вимірювання потужності електромагнітних коливань на його виході, який відрізняється тим, що спочатку узгоджують опір генератора електромагнітних коливань із вхідним опором невзаємного чотириполюсника, із...
Попередній патент: Пристрій для діагностування системи захисту технологічного об’єкта
Наступний патент: Кормороздавач-змішувач
Випадковий патент: Розкидач органічних добрив