П’єзоелектричний віскозиметр
Формула / Реферат
П'єзоелектричний віскозиметр, що містить систему керування, датчик коливань поршня, підсилювач напруги і вимірювальний зонд, що включає одну циліндричну камеру з заглушеними торцями, поршнем, п'єзоелектричним маніпулятором, який відрізняється тим, що в нього введені п'єзоелектричний маніпулятор зі складального стовпця п'єзоелементів, включених електрично зустрічно-паралельно і прикріплених одним кінцем до торцевої заглушки, а другим кінцем до поршня, що з іншої сторони прикріплений до датчика коливань, виконаного зі складального стовпця п'єзоелементів, по своїх параметрах і конструкції відповідний п'єзоелектричному маніпулятору і другим кінцем прикріплений до другого торця вимірювальної камери, вихідний сигнал з якого подається на підсилювач потужності і далі на один із двох входів фазометра, на другий вхід якого подається напруга із системи керування, виконаної у вигляді керованого генератора сигналів трикутної форми, що також подається на керуючий електрод п'єзоелектричного маніпулятора, впускний і випускний штуцери розташовані діаметрально по середині вимірювальної камери.
Текст
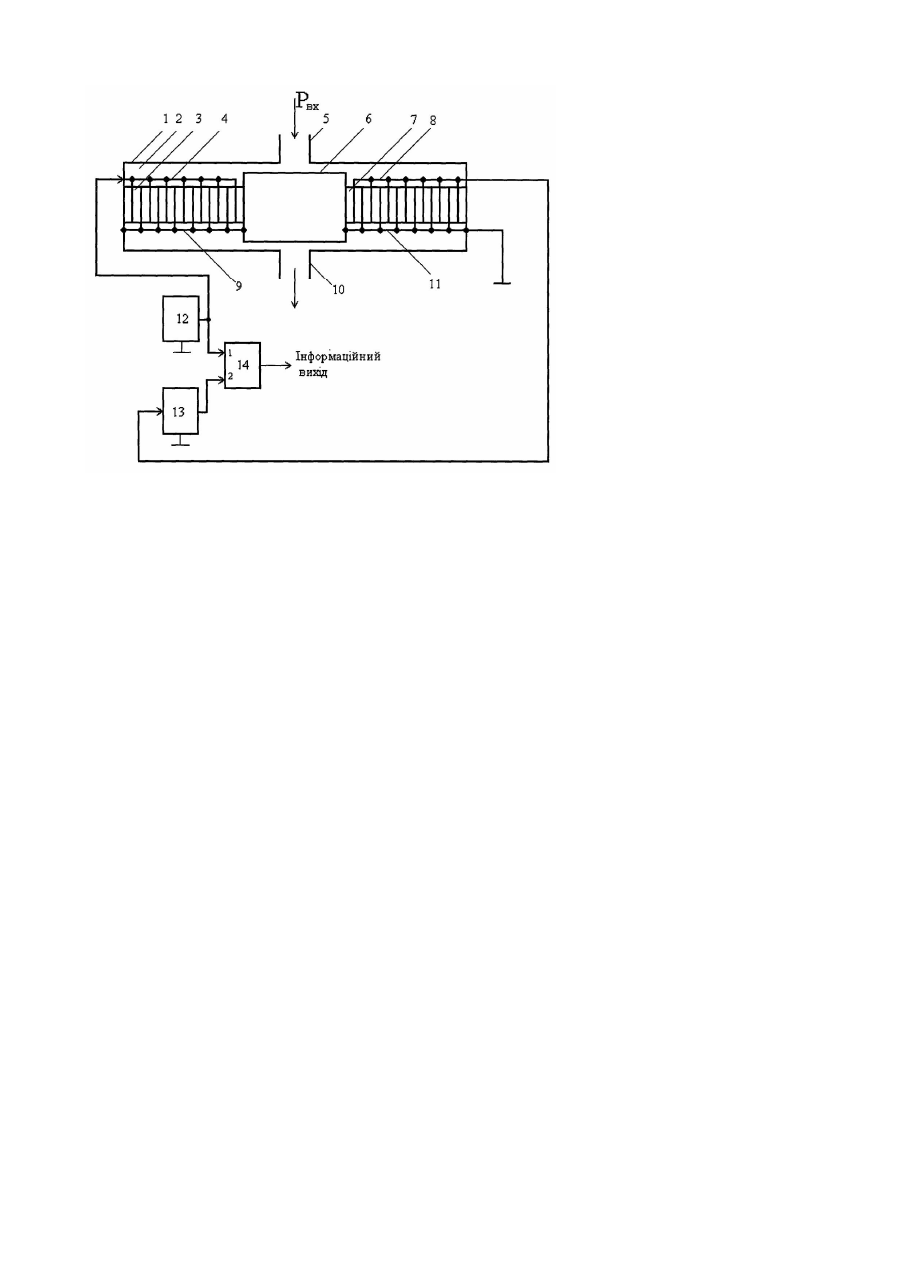
Корисна модель відноситься до віскозиметрів, які засновано на переміщенні тіла в матеріалі, і може бути використаний в хімічній, нафтохімічній, харчовій і іншій галузях промисловості для дослідження реологічних властивостей тонких плівок (~10мкм) [1, 2] прошарків рідин (олій, палива), властивості яких при плині змінюються, наприклад, у ряді вузлів енергетичних установок (плунжерних парах, форсунках). Відомий віскозиметр, який містить систему керування і вимірювальний зонд, що включає дві циліндричні камери, які заглушені кожна з одного торця, двигун у виді двох електромагнітних котушок, упори і поршенькапсулу, при цьому в першу камеру соосно заглушками в один бік поміщена менша за розмірами друга камера з поршнем у середині, який вільно переміщується, зазор між відкритими торцями камер заглушений, у першій камері послідовно розміщені електромагнітні котушки, що охоплюють другу камеру, керують рухом поршня і контролюють його положення між упорами на заглушці та відкритому торці другої камери, при цьому перший і другий виходи системи керування паралельно з'єднані з обмотками електромагнітних котушок, які з'єднані також із входами системи керування [3]. Недоліки пристрою, які обумовлені використанням в якості двигуна електромагнітних котушок, слідуючи: - низька швидкість переміщення поршню - 0,03м/с, в наслідок чого неможливо побудувати трибологічні характеристики тиксотропних рідин (палива й олії); - відсутність можливості регулювання лінійної швидкості переміщення поршню; - велика погрішність вимірів унаслідок виникнення електромагнітних полей від зовнішніх пристроїв; - низький ККД електромагнітних котушок - 70...80%; - виготовлення обмоток котушок з дорогих матеріалів: міді й алюмінію; - неможливість використання віскозиметра в умовах вакууму, наприклад, при його експлуатації в нафтогазовій промисловості, тому що обмотки просочені складами, що склеюють; - великі габарити та маса. Найбільш близьким за технічною сутністю та результатом, що досягається, до корисної моделі, що пропонується, є віскозиметр, який містить систему керування, датчик положення поршня, RS-тригер і вимірювальний зонд, що включає дві циліндричні камери з заглушеним торцем кожна, розташовані соосно, поршень, два упори для обмеження його руху і двигун, який встановлено у першій камері для керування рухом поршня, при цьому інформаційний вихід RS-тригера підключено до входу системи керування, відповідно до корисної моделі введено: другий датчик положення поршня, підсилювач потужності, який регулюється, впускний і випускний клапани, система керування виконана зі схеми "&" та генератора прямокутних імпульсів, який управляється, перша камера виконана з ізоляційного матеріалу, при цьому камери поєднані відкритими торцями через, наприклад, сальник, у безпосередній близькості від якого у стінці другої камери установлено випускний клапан, а на її заглушці - впускний, поршень виконано у вигляді деталі, що перекриває поперечний переріз другої камери між клапанами, зі штоком, що проходить через сальник і з'єднаний з центром заглушки першої камери пружиною, що забезпечує вихідне положення поршня поблизу випускного клапана, упори для забезпечення контролю положення поршня виконані кожний у вигляді двох струмопровідних пластин, закріплених одним боком на стінці циліндра першої камери та охоплюючих між пружиною і сальником протилежними недотичними боками шток, на якому між упорами виконані перший і другий виступи, для перекриття при крайніх положеннях поршня зазорів між пластинами відповідно першого і другого упорів, в якості двигуна використані два п'єзоелементи, які жорстко закріплені кожен одним кінцем до стінки циліндра під гострим кутом до неї між упорами з можливістю вигину до сальника протилежного кінця для переміщення поршня до впускного клапана ударними рухами по штоку між виступами, одна з пластин першого і другого упорів підключена відповідно до входу першого і другого датчиків положення поршня, виходи яких підключені відповідно до S і R входів RS-тригера, вихід якого подано на вхід системи керування - перший вхід схеми "&", на другий вхід якої подано вихід генератора імпульсів, який управляється, вихід схеми "&" - вихід системи керування - через регульований підсилювач потужності підключено паралельно до п'єзоелементів двигуна [4]. Недоліки пристрою, які обумовлені використанням п'єзоелектричного лінійного возвратно-поступального двигуна, слідуючи: - наявність пружини; - контактні пари датчиків положення; - наявність сальника, що розділяє першу і другу камери; - наявність впускного і випускного клапанів. Задачею корисної моделі є створення п'єзоелектричного віскозиметра, у якому використання приводу у виді п'єзоелектричного маніпулятора дозволяє підвищити і регулювати лінійну швидкість переміщення поршня, забезпечити можливість побудови трибологічних характеристик тиксотропних рідин. Поставлена задача вирішується тим, що у п'єзоелектричний віскозиметр, який містить систему керування, датчик коливань поршня, підсилювач напруги і вимірювальний зонд, що включає одну циліндричну камеру з заглушеними торцями, поршнем, п'єзоелектричним маніпулятором, що відрізняється тим, що в нього введені п'єзоелектричний маніпулятор зі складального стовпця п'єзоелементів, включених електричне зустрічне паралельно і прикріплених одним кінцем до торцевої заглушки, а другим кінцем до поршня, що з іншої сторони прикріплений до датчика коливань, виконаного зі складального стовпця п'єзоелементів, по своїх параметрах і конструкції відповідний п'єзоелектричному маніпулятору і другим кінцем прикріплений до другого торця вимірювальної камери, вихідний сигнал з якого подається на підсилювач потужності і далі на один із двох входів фазометру, на другий вхід якого подається напруга із системи керування, виконаної у виді керованого генератора сигналів трикутної форми, що також подається на керуючий електрод п'єзоелектричного маніпулятора, впускний і випускний штуцера розташовуються діаметрально по середині вимірювальної камери. Технічний результат досягається завдяки тому, що п'єзоелектричний маніпулятор у виді складального стовпця шайб п'єзоелементів забезпечує [5]: - можливість переміщення поршня з постійним і перемінним зусиллям і регулювання лінійної швидкості переміщення поршня шляхом зміни амплітуди та частоти напруги, подаваної на п'єзопластини, у результаті чого змінюється товщина стовпця, при цьому забезпечується лінійна швидкість переміщення поршня в діапазоні 0...0,08м/с, що перевищує цей показник у віскозиметра з електромагнітним приводом - можливість побудови трибологічних характеристик тиксотропних рідин; - високу надійність і ресурс (більш 2000ч); - мале енергоспоживання; - іскровибухонебезпечність; - відсутність випромінюваних магнітних полей; - безшумну роботу; - досить високий ККД - до 90%; - економію міді в зв'язку з відсутністю обмоток; - малі масу і габарити. Суть корисної моделі пояснюється кресленням, де зображено вимірювальний зонд 1, що складається з циліндричної камери 2 із заглушеними торцями, усередині якої встановлені п'єзоелектричний маніпулятор 3 зі складального стовпця шайб із приєднаним поршнем 6, що другим кінцем кріпиться до п'єзоелектричного датчика коливань 7, виконаного зі складального стовпця шайб, який іншим кінцем кріпиться до другого торця камери, по середині вимірювального зонда діаметрально розташовуються вхідний 5 і вихідний 10 штуцера, на п'єзоелектричний маніпулятор 3 подається сигнал по електроду 4 від генератора сигналів трикутної форми 12, який викликає збільшення і зменшення товщини складального стовпця, викликаючи переміщення поршня 6 усередині циліндричної камери 2 і роблячи силовий вплив на датчик коливань 7, сигнал з якого по знімному електроду 8 подається на підсилювач напруги 13 і далі на вхід 2 фазометра 14, на вхід 1 якого подається сигнал з генератора сигналів трикутної форми. Електроди 9 і 11 з'єднуються між собою і циліндричною камерою. У вихідному стані при вимкнутому живленні у вимірювальному зонді 1, п'єзоелектричний маніпулятор 2 знаходиться в рівноважному стані так, що прикріплений до другого кінця поршень 6 розташовується по середині вимірювальної камери 2. При цьому датчик коливань 7, прикріплений до іншої сторони поршня знаходиться в стані спокою. До вхідного штуцера 5 підключений вхідний трубопровід з рідиною, що надходить, а до вихідного штуцера 10 підключається вихідний трубопровід. Підведена під тиском рідина заповнює обсяг вимірювальної камери 2. Електроди 9 і 11 з'єднані між собою, а також вимірювальною камерою і масою схеми керування. При включенні живлення керований генератор сигналів трикутної форми 11 видає керуючий сигнал, що надходить по електроду 4 на п'єзоелектричний маніпулятор, а також на вхід 1 фазометру 13. Під дією керуючої напруги п'єзоелектричний маніпулятор 3 починає робити подовжні коливання, змінюючи товщину. Поршень 6 при цьому буде робити переміщення усередині вимірювальної камери, роблячи силовий вплив на датчик коливань 7, що у результаті дії явища прямого п'єзоефекта виробляє напругу, що надходить по електроду 8 на підсилювач напруги 12 і далі на вхід 2 фазометра. Фазометр реєструє зміну зрушення фаз між вхідними сигналами і видає сигнал на інформаційний вихід. Елементи п'єзоелектричного віскозиметра можуть бути реалізовано згідно з відомими схемами: - п'єзоелектричний маніпулятор - с. 18 [7]. - генератор сигналів трикутної - с.72-73 [6]. - підсилювач - с. 107-108 [5]. - фазометр - с. 152 [8] Джерела інформації: 1. Поповский Ю.М., Берникова Н.Б. Исследование оптической анизотропии граничных слоев полидиметилсилоксилана и его смесей с тетрадеканом. // Вопросы физики формообразования и фазовых превращений.- Калинин: КГУ. -1983. -С.25-32. 2. Алтоиз Б.А., Поповский Ю.М. Физика приповерхностных слоев. - Одесса: Астропринт, 1995.-153с. 3. Cambridge Applied Systems, hie. 196 Boston Ave, Medford, MA 02155 USA 781 393-6500 (voice), 781 393-6515 (Fax) SPL440 HIGH PRESSURE RESEARCH VISCOMETER http://www.cambridgeapplied.com/products/Lab/viscometer_spl440.html05.05. 4. Заявка на винахід №2003054350 від 15.05.2003р. 5. Джагупов Р. Г., Ерофеев А. А. Пьезоэлектронные устройства вычислительной техники, систем контроля и управления: Справочник / - СПб.: Политехника, 1994. - 608с. 6. Щербаков В.И., Грездов Г.И. Электронные схемы на операционных усилителях: Справочник. -К.: Техніка, 1983. 213с., ил. 7. Никольский Α.Α. Точные двухканальные следящие электроприводы с пьезокомпенсаторами. - М.: Энергоатомиздат, 1988. - 160с. 8. Швецкий Б.И. Электронные цифровые приборы. - 2-е изд., перераб. И доп. - К.: Тэхника, 1991.-191с.
ДивитисяДодаткова інформація
Автори англійськоюNikolskyi Vitalii Valentynovych
Автори російськоюНикольский Виталий Валентинович
МПК / Мітки
МПК: G01N 11/00, G01N 11/10
Мітки: п'єзоелектричний, віскозиметр
Код посилання
<a href="https://ua.patents.su/3-2925-pehzoelektrichnijj-viskozimetr.html" target="_blank" rel="follow" title="База патентів України">П’єзоелектричний віскозиметр</a>
Віскозиметр
Номер патенту: 63619
Опубліковано: 15.01.2004
Автор: Нікольський Віталій Валентинович
МПК: G01N 11/10, G01N 11/00
Мітки: віскозиметр
Формула / Реферат:
Віскозиметр, який містить систему керування, датчик положення поршня, RS-тригер і вимірювальний зонд, що включає дві циліндричні камери з заглушеним торцем кожна, розташовані співвісно, поршень, два упори для обмеження його руху і двигун, який встановлено у першій камері для керування рухом поршня, при цьому інформаційний вихід RS-тригера підключено до входу системи керування, який відрізняється тим, що в нього введені другий датчик положення...
Коливальний віскозиметр
Номер патенту: 44151
Опубліковано: 15.01.2002
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/16
Мітки: віскозиметр, коливальний
Формула / Реферат:
1. Коливальний віскозиметр, який містить корпус, контур збудження коливань, що містить спарений електромагніт, який відрізняється тим, що він додатково оснащений підсилювачем збудження низької частоти, блоком керування, електромагнітами блока керування, фазоінвертором, другим контуром збудження коливань, частотно-вибірковою ланкою, яка містить два двоконсольних вали із жорстко закріпленим на торці одній з його консолей диском, пружинами,...
Вібраційний віскозиметр
Номер патенту: 37080
Опубліковано: 16.04.2001
Автори: Никифорук Богдан Васильович, Ворошиловський Олег Віталійович, Єршова Емма Олександрівна, Комаров Володимир Олександрович
МПК: G01N 11/16
Мітки: віскозиметр, вібраційний
Текст:
...16. В ємність 14 через заливну горловину 15 заливається рідка речовина 17. Віброзбудники 1 закріплені на силовій рамі 10 жорстко і осесиметрично своїм подовжнім осям, при цьому віброзбудники 1 конструктивно розмішуються попарно з осьовим зазором між осердям. Віброзбудники 1 конструктивно є електромагніти. Пластина 12 довжиною 1, при цьому плечі вищезгаданої пластини 12 відносно осі жорсткості балки 11 є конструктивно рівними між собою і...
Вібраційний віскозиметр
Номер патенту: 38412
Опубліковано: 15.05.2001
Автори: Никифорук Богдан Васильович, Комаров Володимир Олександрович, Єршова Емма Олександрівна
МПК: G01N 11/16, G01N 11/10
Мітки: віскозиметр, вібраційний
Текст:
...частоти 17 і приладу 18, який реєструє (частотоміра), з'єднують електричним ланцюгом 20 із входом блоку живлення 19. Проводять перевірку занурення робочого органа 11 у досліджуваний матеріал (речовину) 22. Робочий орган 11 датчика в'язкості повинен бути цілком зануреним у згаданий досліджуваний матеріал (речовину) 22. Вмикають блок (джерело) живлення 19 і подають живлення на підсилювач збудження 17 і прилад 18, який реєструє (частотомір). При...
Коливальний віскозиметр
Номер патенту: 45220
Опубліковано: 15.03.2002
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
МПК: G01N 11/16, G01F 1/56
Мітки: коливальний, віскозиметр
Формула / Реферат:
1. Коливальний віскозиметр, який містить корпус, контур збудження коливань, що містить спарений електромагніт, який відрізняється тим, що він додатково оснащений підсилювачем збудження низької частоти, блоком керування, електромагнітами блока керування, фазоінвертором, другим контуром збудження коливань, частотно-вибірковою ланкою, яка містить два двоконсольних вала з жорстко закріпленим на торці однієї з його консолей конусом, пружинами,...
Попередній патент: Спосіб виміру параметрів сипучих матеріалів у потоці
Наступний патент: Ортопедичне взуття з жорсткими берцями та рухомістю в області верхнього гомілковостопного суглоба
Випадковий патент: Брекер покришки пневматичної шини із екрануючим шаром