Спосіб автоматичного регулювання кутової швидкості та пристрій для його здійснення
Текст
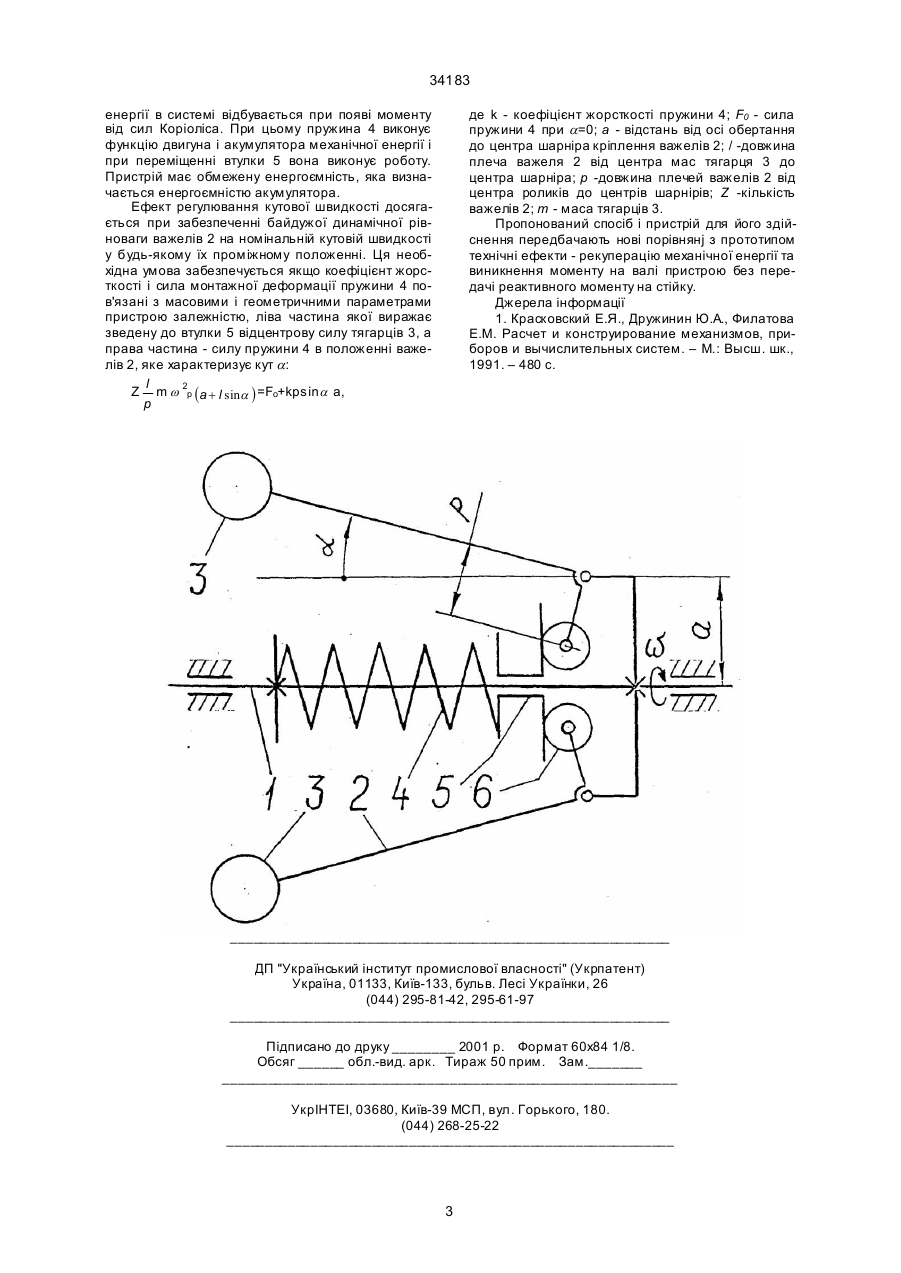
1. Спосіб автоматичного регулювання кутової швидкості шляхом дії на потік рушійної енергії в регульованій системі, який відрізняється тим, що дію на потік енергії здійснюють зміною динамічного моменту інерції механічної обертальної системи, яку створюють шляхом перетворення енергії механічного акумулятора у відносне переміщення мас інерційних ланок системи під дією їх відцентрових сил. 2. Пристрій для автоматичного регулювання кутової швидкості, який містить стійку з валом і флан 34183 лось б керування потоку рушійної енергії в регульованій системі. Поставлена задача вирішується тим, що в способі автоматичного регулювання кутової швидкості шляхом дії на потік рушійної енергії в регульованій системі, згідно з винаходом, дію на потік енергії здійснюють зміною динамічного моменту інерції механічної обертальної системи, яку створюють шляхом перетворення енергії механічного акумулятора у відносне переміщення мас інерційних ланок системи під дією їх відцентрових сил. Як відомо, обертальний рух ланки зведення механічної системи описується рівнянням Лагранжа у формі dw ¶I Iз в + 0,5 з в w 2 = T , dt ¶j де зв - зведений динамічний момент інерції системи; Т - зведений крутний момент, j і w - кутові переміщення і швидкість ланки зведення [1, с.47]. Оскільки кутова швидкість ланки зведення - вала регульованої системи - є наближеною до постійної dw w ® const і ® 0 , момент сил на валу системи dt визначається другим членом рівняння. Шляхом зміни динамічного моменту інерції обертальної механічної системи створюється момент рушійних сил, який, згідно з винаходом, використовується для регулювання кутової швидкості. Джерелом енергії слугує акумулятор механічної енергії, робота якого приводить до зміни динамічного моменту інерції системи і, як наслідок, притоку рушійної енергії в систему регулювання. Автоматична зміна динамічного моменту інерції здійснюється, згідно з винаходом, під дією відцентрових сил, діючих на маси інерційних ланок системи. Поставлена задача вирішується також тим, що пристрій для автоматичного регулювання кутової швидкості, який містить стійку з валом і фланцем на ньому, розміщені симетрично відносно осі вала і з'єднані шарнірно з фланцем важелі з тягарцями на кінцях, встановлену з можливістю переміщення уздовж осі вала втулку, згідно з винаходом, містить гвинтову пружину стиску, один кінець якої жорстко з'єднаний з валом, а інший контактує з втулкою, з протилежним від пружини торцем якої контактують згадані важелі, які виконані двоплечими з ортогональним розміщенням плечей, при цьому протилежні до тягарців плечі важелів утворюють із згаданою втулкою синусні механізми, а пружина підібрана і налагоджена таким чином, що на номінальній кутовій швидкості важелі динамічно зрівноважені відцентровою силою тягарців на одному їх плечі і силою пружини на протилежному в будьякому їх проміжному положенні. Оскільки двоплечі важелі динамічно зрівноважені відцентровою силою тягарців на одному їх плечі і силою пружини на протилежному в будьякому їх проміжному положенні саме на номінальній кутовій швидкості, то будь-яке мале відхилення швидкості, викликане прикладенням зовнішнього моменту, приводить до порушення цієї рівноваги і до переміщення важелів. Переміщення важелів змінює динамічний момент інерції обертальної системи І зв, що викликає появу крутного моменту Т на валу пристрою. Оскільки момент Т завжди протилежний напрямку моменту зовнішніх сил, при кладеного до вала пристрою, він запобігає відхиленню кутової швидкості від номінальної. Тому запропонований пристрій забезпечує автоматичне регулювання кутової швидкості. Винахід пояснюється кресленням, на якому зображена кінематична схема пристрою для автоматичного регулювання кутової швидкості. Спосіб здійснюють наступним чином. При відхиленні кутової швидкості від номінального значення змінюється величина відцентрової сили, яка діє на ланки механічної системи. Оскільки згадані ланки знаходяться в стані динамічної рівноваги при номінальній кутовій швидкості в будь-якому проміжному їх положенні під дією двох сил - відцентрової і сили акумулятора, то при зміні однієї з них, а саме - відцентрової сили, рівновага порушується і ланки здійснюють рух, змінюючи при цьому динамічний момент інерції системи. Наслідком зміни останнього є виникнення на валу крутного моменту, який запобігає подальшому відхиленню швидкості. Таким чином, відбувається автоматична зміна потоку рушійної енергії в регульованій системі, джерелом якої є акумулятор механічної енергії. Пристрій для автоматичного регулювання кутової швидкості містить стійку (на фігурі не показана), вал 1, з фланцем вала 1 шарнірно з'єднані двоплечі ортогональні важелі 2 з тягарцями 3 на кінцях. На валу 1 розміщена гвинтова пружина стиску 4, один кінець якої жорстко з'єднаний з валом 1, а інший впирається в рухому відносно вала 1 втулк у 5, з протилежним торцем якої контактують важелі 2, утворюючи з нею синусні механізми. Пристрій містить декілька симетрично розташованих відносно осі обертання важелів 2 для статичного і динамічного зрівноваження системи, а для зменшення втрат на тертя між втулкою 5 і важелями 2 введені ролики 6. Пружина стиску 4 підібрана і налагоджена таким чином, що на номінальній кутовій швидкості важелі 2 динамічно зрівноважені відцентровою силою тягарців 3 на одному їх плечі і силою пружини 4 на протилежному в будь-якому їх проміжному положенні. Пристрій працює наступним чином. На розрахунковій кутовій швидкості важелі 2 динамічно зрівноважені відцентровими силами тягарців 3 і силою пружини 4, знаходяться в стані спокою відносно вала 1. При виникненні малого відхилення кутової швидкості динамічна рівновага важелів 2 порушується, оскільки змінюється відцентрова сила тягарців 3. Важелі 2 починають переміщуватись. Під час кутового переміщення важелів 2 на тягарці 3 діють сили Коріоліса, пари яких утворюють крутний момент Т, який без урахування маси важелів 2 визначається T = 2zmajl cosa (a + l sina ) , && & де a - кутова швидкість переміщення важелів 2; & j - кутова швидкість вала 1; m - маса тягарців 3; z - кількість важелів 2; а - відстань від осі обертання до центра шарніра кріплення важелів 2; l - довжина плеча важеля 2 від центра мас тягарця 3 до центра шарніра, a - кутова координата важеля 2. Регулювання кутової швидкості досягається завдяки тому, що напрям моменту від сил Коріоліса завжди протилежний напряму моменту, прикладеного до вала 1 пристрою ззовні, а потік рушійної 2 34183 енергії в системі відбувається при появі моменту від сил Коріоліса. При цьому пружина 4 виконує функцію двигуна і акумулятора механічної енергії і при переміщенні втулки 5 вона виконує роботу. Пристрій має обмежену енергоємність, яка визначається енергоємністю акумулятора. Ефект регулювання кутової швидкості досягається при забезпеченні байдужої динамічної рівноваги важелів 2 на номінальній кутовій швидкості у будь-якому їх проміжному положенні. Ця необхідна умова забезпечується якщо коефіцієнт жорсткості і сила монтажної деформації пружини 4 пов'язані з масовими і геометричними параметрами пристрою залежністю, ліва частина якої виражає зведену до втулки 5 відцентрову силу тягарців 3, а права частина - силу пружини 4 в положенні важелів 2, яке характеризує кут a : l Z m w 2p (a + l sina ) =Fo+kpsin a a, p де k - коефіцієнт жорсткості пружини 4; F0 - сила пружини 4 при a =0; a - відстань від осі обертання до центра шарніра кріплення важелів 2; / -довжина плеча важеля 2 від центра мас тягарця 3 до центра шарніра; p -довжина плечей важелів 2 від центра роликів до центрів шарнірів; Z -кількість важелів 2; m - маса тягарців 3. Пропонований спосіб і пристрій для його здійснення передбачають нові порівнянj з прототипом технічні ефекти - рекуперацію механічної енергії та виникнення моменту на валі пристрою без передачі реактивного моменту на стійку. Джерела інформації 1. Красковский Е.Я., Дружинин Ю.А., Филатова Е.М. Расчет и конструирование механизмов, приборов и вычислительных систем. – М.: Высш. шк., 1991. – 480 с. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatic rotating speed control and device for its realization
Автори англійськоюKliuchkovskyi Serhii Myronovych
Назва патенту російськоюСпособ автоматического регулирования угловой скорости и устройство для его осуществления
Автори російськоюКлючковский Сергей Миронович
МПК / Мітки
МПК: G05D 13/00
Мітки: здійснення, автоматичного, спосіб, швидкості, регулювання, кутової, пристрій
Код посилання
<a href="https://ua.patents.su/3-34183-sposib-avtomatichnogo-regulyuvannya-kutovo-shvidkosti-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного регулювання кутової швидкості та пристрій для його здійснення</a>
Спосіб перетворення кута повороту вала на частоту і код кутової швидкості та пристрій для його здійснення
Номер патенту: 18485
Опубліковано: 25.12.1997
Автори: Скрипник Юрій Олексійович, Кондратов Владислав Тимофійович
МПК: H03M 7/00, G01R 25/00, H03M 1/60, H03M 1/64
Мітки: частоту, вала, кута, швидкості, пристрій, перетворення, повороту, здійснення, код, спосіб, кутової
Формула / Реферат:
1. Способ преобразования угла поворота вала в частоту и код угловой скорости, заключающийся в формировании опорного напряжения фиксированной частоты, формировании фазового напряжения переменной частоты, сдвинутого по фазе относительно фазы опорного напряжения на угол, пропорциональный углу поворота вала, с помощью фазовращателя, формировании из опорного и фазового напряжений соответственно первого и второго напряжений переменных частот,...
Спосіб вимірювання кутової швидкості та пристрій для його здійснення
Номер патенту: 10897
Опубліковано: 25.12.1996
Автори: Скрипник Юрій Олексійович, Фадєєв Олексій Валерієвич, Довгополий Анатолій Степанович, Ільєнко Анатолій Миколайович
МПК: G01C 19/64
Мітки: спосіб, швидкості, кутової, здійснення, пристрій, вимірювання
Формула / Реферат:
(57) 1. Способ измерения угловой скорости, включающий разделение оптического монохроматического когерентного излучения на две волны, распространение их в катушке волоконного световода во встречных направлениях, сдвиг частоты одной из волн до ее вхождения в катушку волоконного световода, а частота другой волны - после прохождения ею катушки волоконного световода, совмещение встречно распространяющихся волн, образующих интерференционную...
Спосіб вимірювання кутової швидкості і пристрій для його здійснення
Номер патенту: 22597
Опубліковано: 17.03.1998
Автори: Ільєнко Анатолій Миколайович, Скрипник Юрій Олексійович
МПК: G01C 19/64
Мітки: пристрій, спосіб, здійснення, швидкості, кутової, вимірювання
Формула / Реферат:
1. Способ измерения угловой скорости, включающий разделение оптического излучения на две волны, распространяющиеся в катушке волоконного световода во встречных направлениях, сдвиг частоты одной из волн до ее вхождения в катушку волоконного световода, а частоту другой волны сдвигают на то же значение после прохождения ею катушки волоконного световода, совмещение встречно распространяющихся волн, образующих интерференционную картину,...
Спосіб вимірювання кутової швидкості та пристрій для його здійснення
Номер патенту: 10840
Опубліковано: 25.12.1996
Автори: Дубовенко Олександр Валентинович, Скрипник Юрій Олексійович, Жовнір Микола Федорович, Довгополий Анатолій Степанович, Скрипник Вікторія Іосиповна
МПК: G01P 9/00
Мітки: пристрій, швидкості, здійснення, кутової, спосіб, вимірювання
Формула / Реферат:
1. Способ измерения угловой скорости, заключающийся в том, что в кольцевом волноводе, вращающемся с угловой скоростью Wх, возбуждают поверхностные акустические волны, преобразуют поверхностные акустические волны в электрический сигнал приемником, механически развязанным с кольцевым волноводом, и определяют угловую скорость по частоте сигнала на выходе приемника, отличающийся тем, что вначале направление распространения поверхностных...
Хмельницька система автоматичного регулювання кутової швидкості теплової турбіни
Номер патенту: 836
Опубліковано: 15.12.1993
Автор: Музичук Федір Максимович
МПК: G05D 13/00
Мітки: швидкості, автоматичного, система, турбіни, хмельницька, регулювання, кутової, теплової
Формула / Реферат:
Хмельницкая система автоматического регулирования угловой скорости тепловой турбины, содержащая датчик угловой скорости, выполненный в виде подпружиненного центробежного механизма с грузами и соосной пружине муфтой, гидравлический цилиндрический поршневой серводвигатель с управляющим золотником и силовым штоком, гидравлическое цилиндрически-поршневое изодромное устройство, корпус-цилиндр которого, заполненный рабочей жидкостью, жестко связан...
Попередній патент: Спосіб регенерації активованого вугілля
Наступний патент: Спосіб виготовлення високочастотних біполярних n-p-n транзисторів
Випадковий патент: Блокова система фільтрування