Система позиціювання ротора гідрогенератора
Номер патенту: 103026
Опубліковано: 25.11.2015
Автори: Волочай Артем Геннадійович, Бровка Олександр Володимирович, Майборода Сергій Володимирович, Ромашихін Юрій Володимирович, Ромашихіна Жанна Іванівна

Формула / Реферат
Система позиціювання ротора гідрогенератора, яка складається з двох асинхронних двигунів, датчика нахиломіра, системи керування та перетворювачів частоти, яка відрізняється тим, що додатково містить лазерні датчики відстані та датчики кутів поворотів валів асинхронних двигунів, які встановлено на кожну лебідку, причому усі датчики приєднані до блока керування, який реалізовано на базі промислового мікроконтроллера, який приєднаний до перетворювачів частоти, безпосередньо приєднаних до двигунів.
Текст
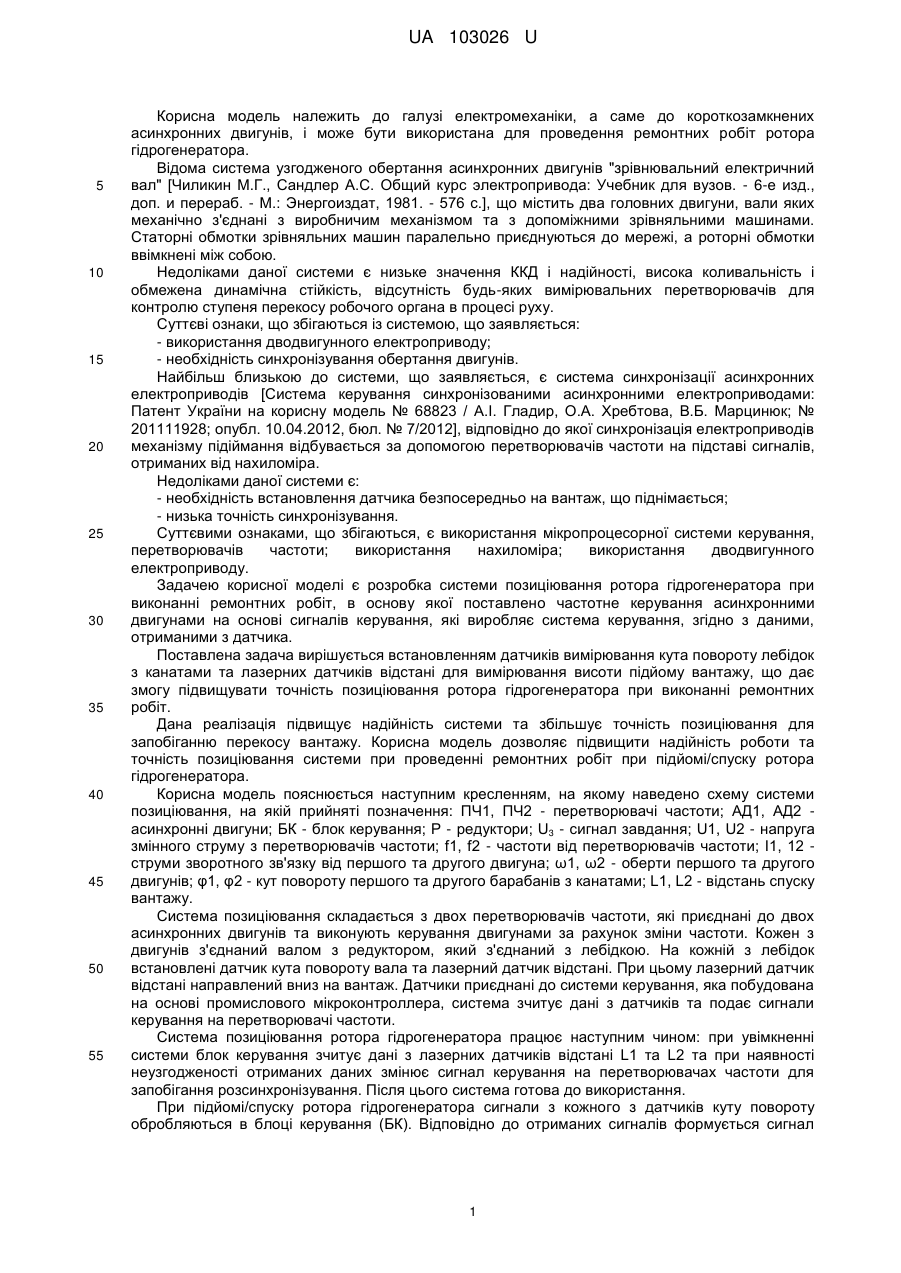
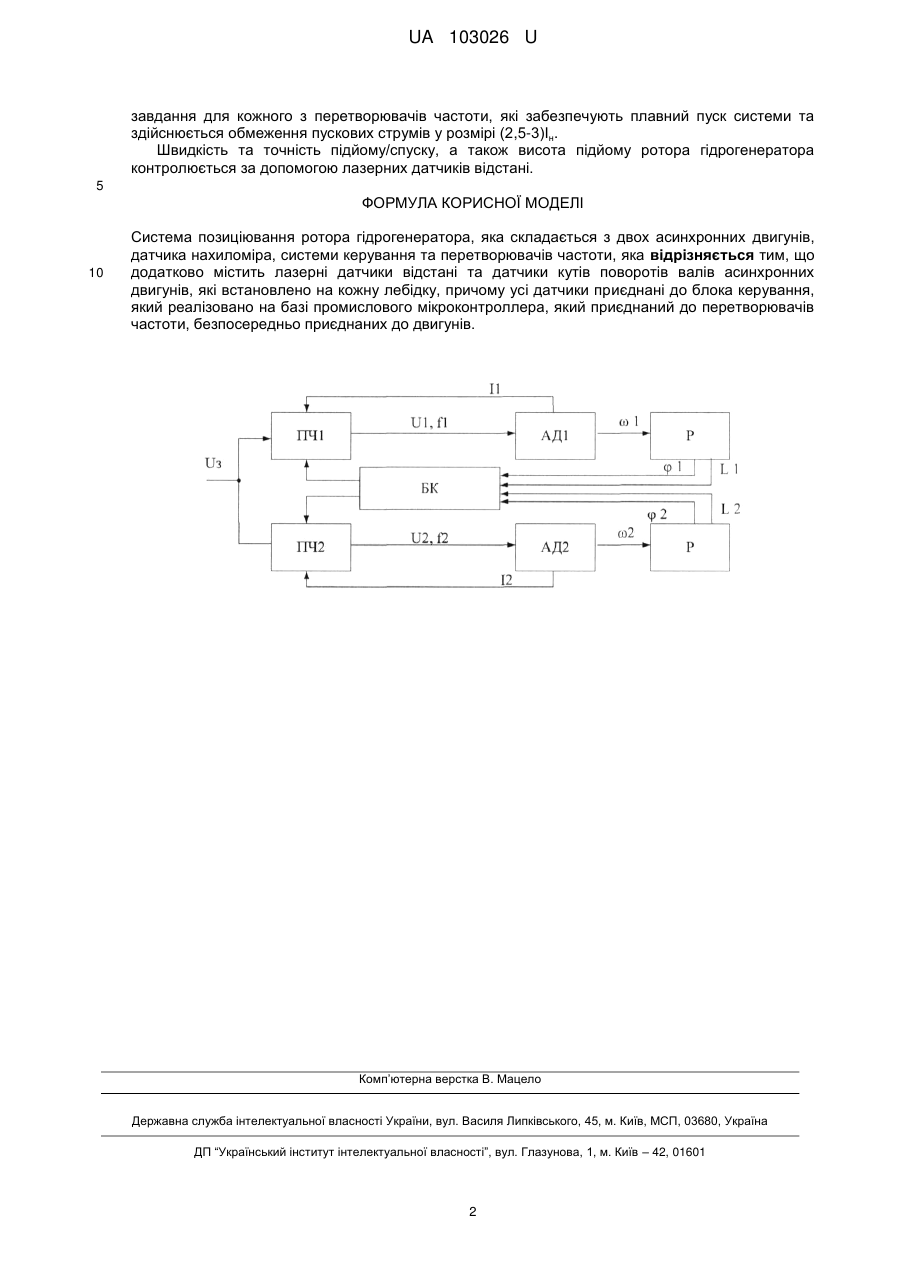
Реферат: Система позиціювання ротора гідрогенератора складається з двох асинхронних двигунів, датчика нахиломіра, системи керування та перетворювачів частоти. Додатково введені лазерні датчики відстані та датчики кутів поворотів валів асинхронних двигунів, які встановлено на кожну лебідку. Усі датчики приєднані до блока керування, який реалізовано на базі промислового мікроконтроллера, який приєднаний до перетворювачів частоти, безпосередньо приєднаних до двигунів. UA 103026 U (12) UA 103026 U UA 103026 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі електромеханіки, а саме до короткозамкнених асинхронних двигунів, і може бути використана для проведення ремонтних робіт ротора гідрогенератора. Відома система узгодженого обертання асинхронних двигунів "зрівнювальний електричний вал" [Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. - 6-е изд., доп. и перераб. - М.: Энергоиздат, 1981. - 576 с.], що містить два головних двигуни, вали яких механічно з'єднані з виробничим механізмом та з допоміжними зрівняльними машинами. Статорні обмотки зрівняльних машин паралельно приєднуються до мережі, а роторні обмотки ввімкнені між собою. Недоліками даної системи є низьке значення ККД і надійності, висока коливальність і обмежена динамічна стійкість, відсутність будь-яких вимірювальних перетворювачів для контролю ступеня перекосу робочого органа в процесі руху. Суттєві ознаки, що збігаються із системою, що заявляється: - використання дводвигунного електроприводу; - необхідність синхронізування обертання двигунів. Найбільш близькою до системи, що заявляється, є система синхронізації асинхронних електроприводів [Система керування синхронізованими асинхронними електроприводами: Патент України на корисну модель № 68823 / А.І. Гладир, О.А. Хребтова, В.Б. Марцинюк; № 201111928; опубл. 10.04.2012, бюл. № 7/2012], відповідно до якої синхронізація електроприводів механізму підіймання відбувається за допомогою перетворювачів частоти на підставі сигналів, отриманих від нахиломіра. Недоліками даної системи є: - необхідність встановлення датчика безпосередньо на вантаж, що піднімається; - низька точність синхронізування. Суттєвими ознаками, що збігаються, є використання мікропроцесорної системи керування, перетворювачів частоти; використання нахиломіра; використання дводвигунного електроприводу. Задачею корисної моделі є розробка системи позиціювання ротора гідрогенератора при виконанні ремонтних робіт, в основу якої поставлено частотне керування асинхронними двигунами на основі сигналів керування, які виробляє система керування, згідно з даними, отриманими з датчика. Поставлена задача вирішується встановленням датчиків вимірювання кута повороту лебідок з канатами та лазерних датчиків відстані для вимірювання висоти підйому вантажу, що дає змогу підвищувати точність позиціювання ротора гідрогенератора при виконанні ремонтних робіт. Дана реалізація підвищує надійність системи та збільшує точність позиціювання для запобіганню перекосу вантажу. Корисна модель дозволяє підвищити надійність роботи та точність позиціювання системи при проведенні ремонтних робіт при підйомі/спуску ротора гідрогенератора. Корисна модель пояснюється наступним кресленням, на якому наведено схему системи позиціювання, на якій прийняті позначення: ПЧ1, ПЧ2 - перетворювачі частоти; АД1, АД2 асинхронні двигуни; БК - блок керування; Ρ - редуктори; U3 - сигнал завдання; U1, U2 - напруга змінного струму з перетворювачів частоти; f1, f2 - частоти від перетворювачів частоти; I1, 12 струми зворотного зв'язку від першого та другого двигуна; ω1, ω2 - оберти першого та другого двигунів; φ1, φ2 - кут повороту першого та другого барабанів з канатами; L1, L2 - відстань спуску вантажу. Система позиціювання складається з двох перетворювачів частоти, які приєднані до двох асинхронних двигунів та виконують керування двигунами за рахунок зміни частоти. Кожен з двигунів з'єднаний валом з редуктором, який з'єднаний з лебідкою. На кожній з лебідок встановлені датчик кута повороту вала та лазерний датчик відстані. При цьому лазерний датчик відстані направлений вниз на вантаж. Датчики приєднані до системи керування, яка побудована на основі промислового мікроконтроллера, система зчитує дані з датчиків та подає сигнали керування на перетворювачі частоти. Система позиціювання ротора гідрогенератора працює наступним чином: при увімкненні системи блок керування зчитує дані з лазерних датчиків відстані L1 та L2 та при наявності неузгодженості отриманих даних змінює сигнал керування на перетворювачах частоти для запобігання розсинхронізування. Після цього система готова до використання. При підйомі/спуску ротора гідрогенератора сигнали з кожного з датчиків куту повороту обробляються в блоці керування (БК). Відповідно до отриманих сигналів формується сигнал 1 UA 103026 U завдання для кожного з перетворювачів частоти, які забезпечують плавний пуск системи та здійснюється обмеження пускових струмів у розмірі (2,5-3)Ін. Швидкість та точність підйому/спуску, а також висота підйому ротора гідрогенератора контролюється за допомогою лазерних датчиків відстані. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 Система позиціювання ротора гідрогенератора, яка складається з двох асинхронних двигунів, датчика нахиломіра, системи керування та перетворювачів частоти, яка відрізняється тим, що додатково містить лазерні датчики відстані та датчики кутів поворотів валів асинхронних двигунів, які встановлено на кожну лебідку, причому усі датчики приєднані до блока керування, який реалізовано на базі промислового мікроконтроллера, який приєднаний до перетворювачів частоти, безпосередньо приєднаних до двигунів. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюHydrogenerator rotor positioning system
Автори англійськоюRomashykhin Yurii Volodymyrovych, Brovka Oleksandr Volodymyrovych, Romashykhina Zhanna Ivanivna, Volochai Artem Hennadiiovych, Maiboroda Serhii Volodymyrovych
Назва патенту російськоюСистема позиционирования ротора гидрогенератора
Автори російськоюРомашихин Юрий Владимирович, Бровка Александр Владимирович, Ромашихина Жанна Ивановна, Волочай Артем Геннадьевич, Майборода Сергей Владимирович
МПК / Мітки
МПК: H02P 5/00
Мітки: позиціювання, система, гідрогенератора, ротора
Код посилання
<a href="https://ua.patents.su/4-103026-sistema-poziciyuvannya-rotora-gidrogeneratora.html" target="_blank" rel="follow" title="База патентів України">Система позиціювання ротора гідрогенератора</a>
Пристрій для безконтактного вимірювання температури ротора гідрогенератора
Номер патенту: 80566
Опубліковано: 10.06.2013
Автори: Грабко Валентин Володимирович, Грабко Володимир Віталійович, Варавва Микола Олегович
МПК: G01K 13/08
Мітки: пристрій, безконтактного, гідрогенератора, температури, вимірювання, ротора
Формула / Реферат:
Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, за яким n дзеркал закріплені на оптичній лінійці таким чином, що їх площини утворюють кут 45° з головною оптичною віссю і на одній оптичній осі з дзеркалами встановлені n лінз, вихід дільника частоти підключений до входів буферного регістра, лічильника та до першого входу відеоконтрольного блока, другий та третій входи якого з'єднані з виходами...
Пристрій для безконтактного вимірювання температури ротора гідрогенератора
Номер патенту: 66867
Опубліковано: 25.01.2012
Автори: Грабко Валентин Володимирович, Грабко Володимир Віталійович, Кухарчук Василь Васильович
МПК: G01K 13/08
Мітки: вимірювання, пристрій, безконтактного, гідрогенератора, ротора, температури
Формула / Реферат:
Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, η дзеркал, закріплених на оптичній лінійці таким чином, що їх площини утворюють кут 45° з головною оптичною віссю, n лінз, що встановлені на одній оптичній осі з дзеркалами, лінійка n інфрачервоних датчиків, дільник частоти, буферний регістр, комутатор, аналого-цифровий перетворювач, інтерфейсний блок, перший генератор імпульсів, два...
Пристрій для безконтактного вимірювання температури ротора гідрогенератора
Номер патенту: 80568
Опубліковано: 10.06.2013
Автори: Варавва Микола Олегович, Грабко Володимир Віталійович, Грабко Валентин Володимирович
МПК: G01K 13/08
Мітки: вимірювання, безконтактного, температури, ротора, пристрій, гідрогенератора
Формула / Реферат:
Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, за яким n дзеркал закріплені на оптичній лінійці таким чином, що їх площини утворюють кут 45° з головною оптичною віссю і на одній оптичній осі з дзеркалами встановлені n лінз, вихід дільника частоти підключений до входу буферного регістра та до першого входу відеоконтрольного блока, другий та третій входи якого з'єднані з виходами першого та...
Пристрій для безконтактного вимірювання температури ротора гідрогенератора
Номер патенту: 66866
Опубліковано: 25.01.2012
Автори: Кухарчук Василь Васильович, Грабко Володимир Віталійович, Грабко Валентин Володимирович
МПК: G01K 13/08
Мітки: температури, вимірювання, безконтактного, ротора, пристрій, гідрогенератора
Формула / Реферат:
Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, інфрачервоний приймач, що містить n окремих інфрачервоних сенсорів, дільник частоти, буферний регістр, комутатор, блок підготовки даних, перший генератор імпульсів, два керовані підсилювачі, відеоконтрольний блок, лічильник, генератор напруги та блок пам'яті, причому вихід дільника частоти підключений до входів буферного регістра, лічильника та...
Пристрій для безконтактного вимірювання температури ротора гідрогенератора
Номер патенту: 80569
Опубліковано: 10.06.2013
Автори: Грабко Валентин Володимирович, Грабко Володимир Віталійович, Варавва Микола Олегович
МПК: G01K 13/08
Мітки: пристрій, гідрогенератора, ротора, безконтактного, температури, вимірювання
Формула / Реферат:
Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, дільник частоти, вихід якого підключений до входів буферного регістра, лічильника та до першого входу відеоконтрольного блока, другий та третій входи якого з'єднані відповідно з виходами першого та другого керованих підсилювачів, перші входи яких підключені до виходу генератора напруги, а другі входи з'єднані відповідно з першим та другим...
Попередній патент: Спосіб позиціонування електропривода з підвищеною швидкодією
Наступний патент: Спосіб використання обліпихи крушиновидної для рекультивації залізорудних відвалів криворіжжя
Випадковий патент: Спосіб діагностики розвитку атеросклерозу