Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 48903
Опубліковано: 15.08.2002
Автори: Домбровська Наталія Валентинівна, Бендерук Ірина Миколаївна, Южаков Сергій Васильович, Білан Степан Миколайович
Формула / Реферат
Спосіб розпізнавання плоских геометричних фігур, який полягає в тому, що сканують і перетворюють зображення в послідовність сигналів, який відрізняється тим, що визначають функцію площі перетину вхідної фігури та її копії, паралельно зсувають копію фігури і на кожному кроці зсуву визначають площу перетину вхідної фігури та її копії, проводять зсув до отримання площі перетину, яка дорівнює нулю, що відповідає максимальному зсуву у відповідному напрямку, перпендикулярному першому, і визначають для нього функцію перетину площин, порівнюють з еталонними значеннями функцію перетину площин і визначають класи фігур Х та Y для кожного напрямку відповідно, а шукану фігуру визначають на перетині отриманих множин фігур, які належать відповідним класам Х та Y.
Текст
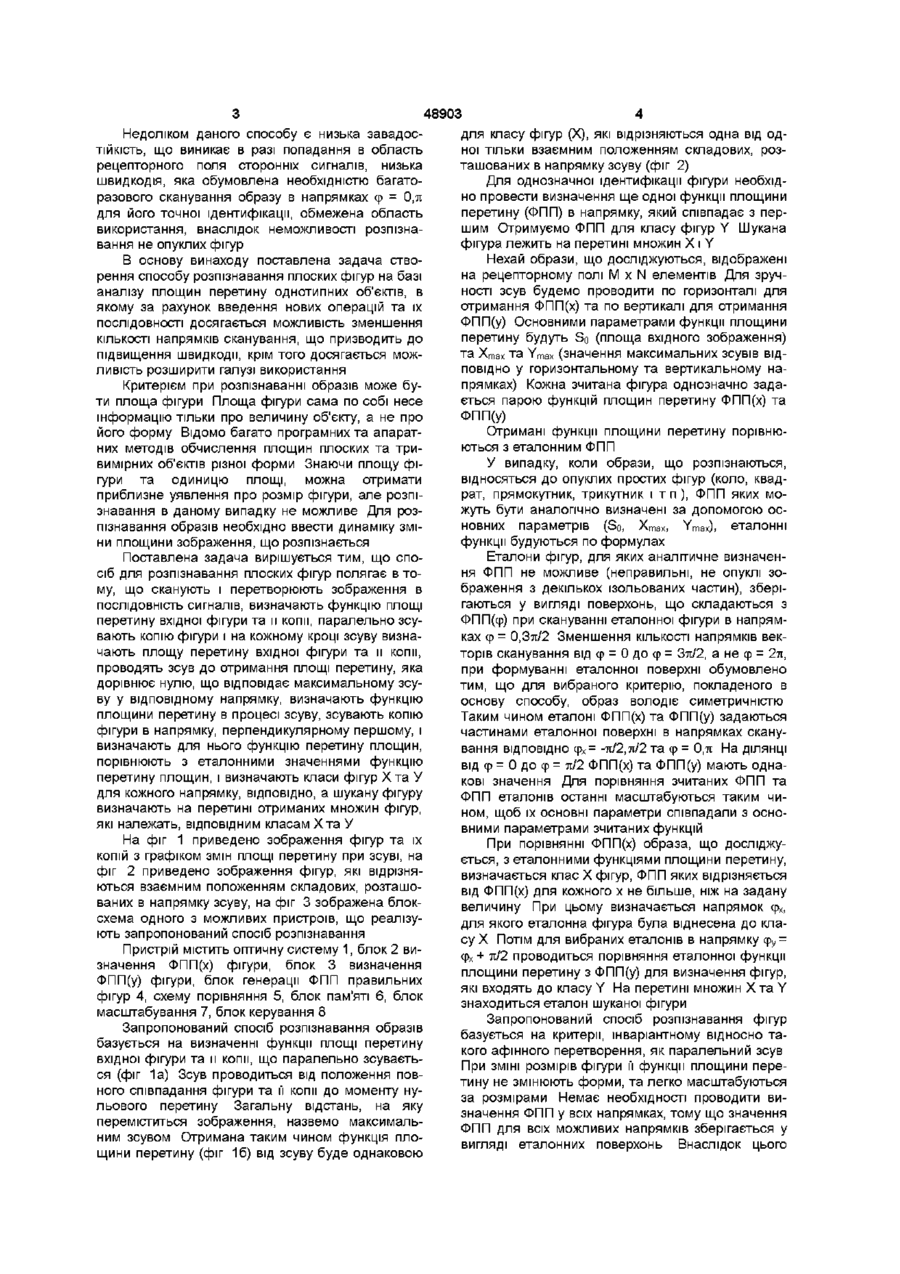
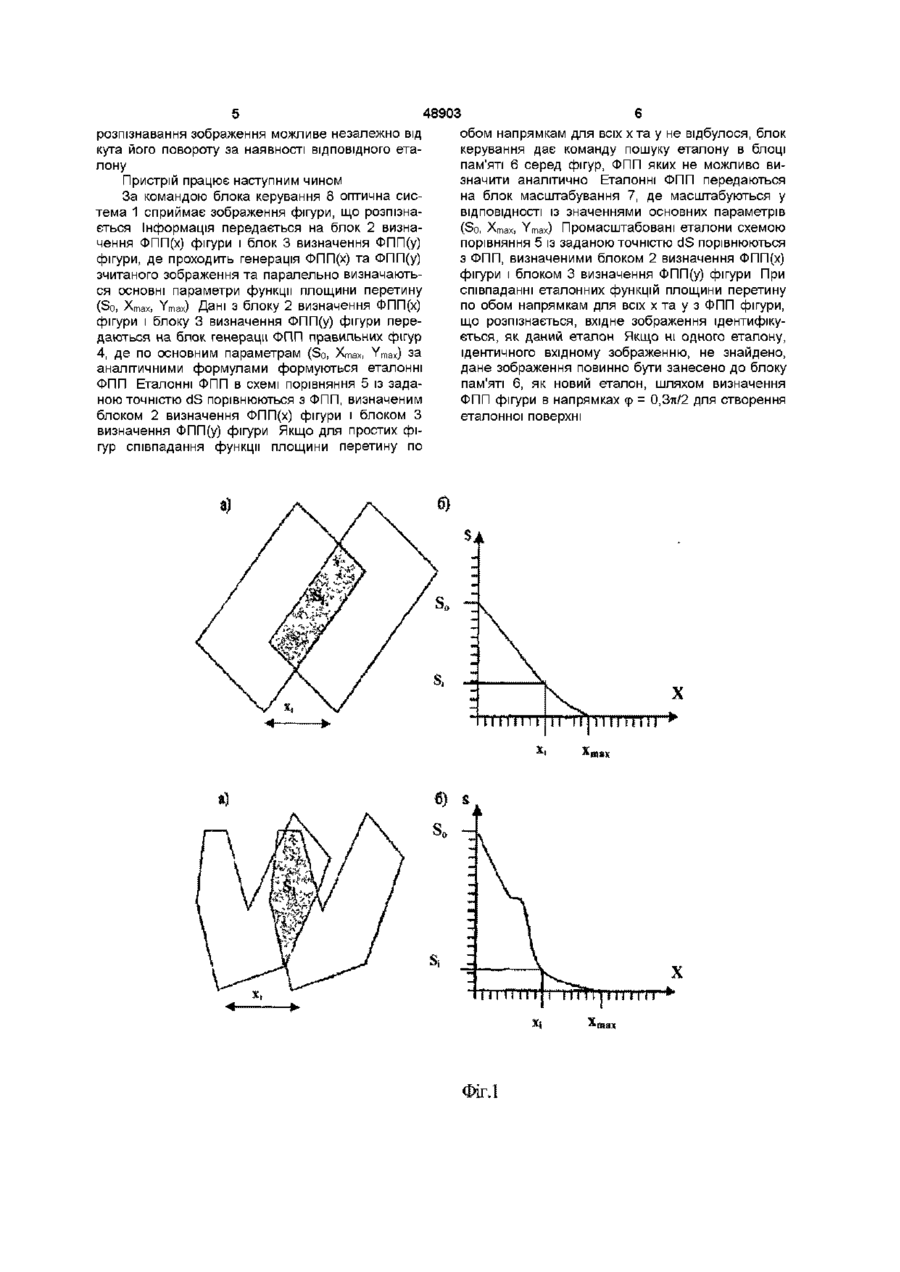
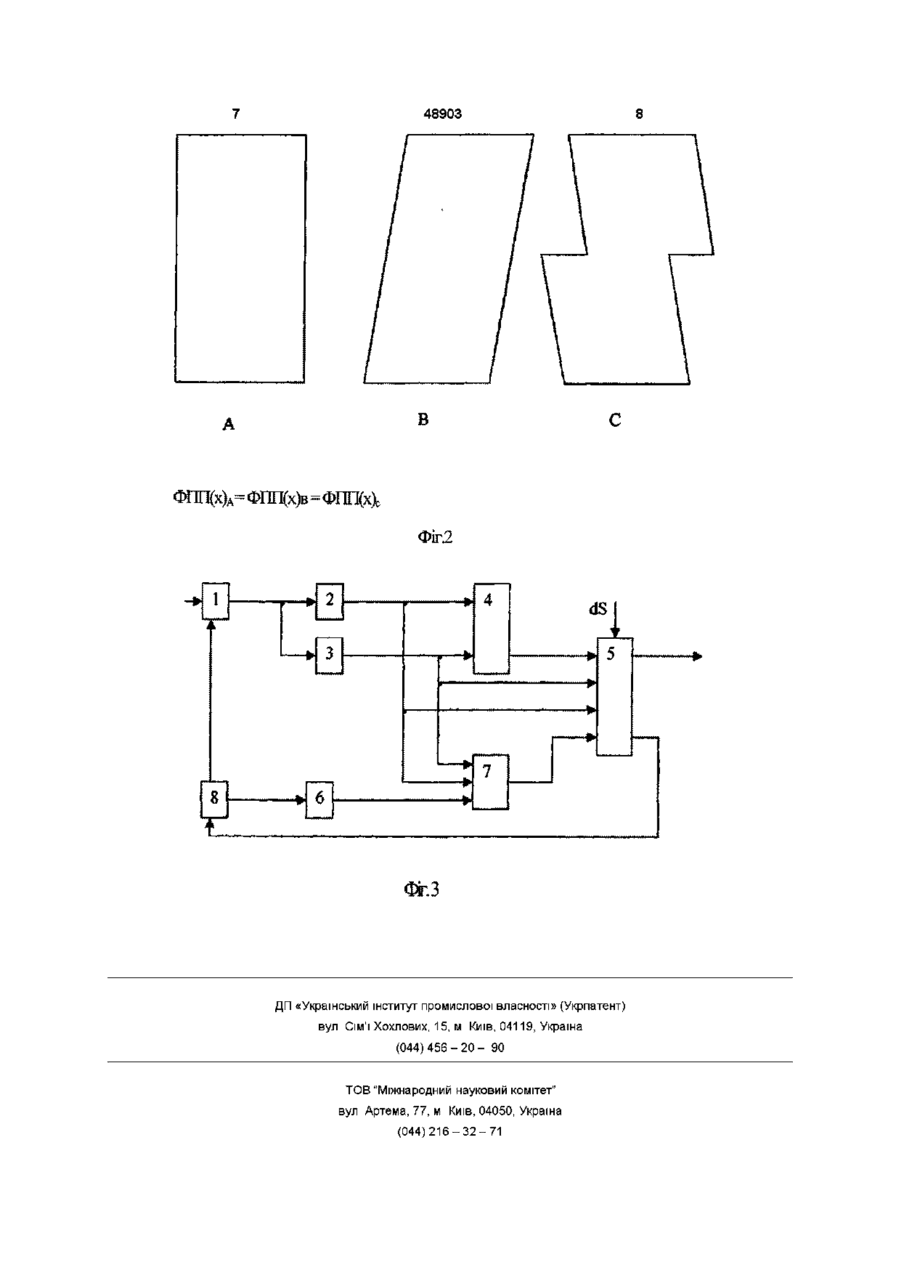
Спосіб розпізнавання плоских геометричних фігур, який полягає в тому, що сканують і перетворюють зображення в ПОСЛІДОВНІСТЬ сигналів, який відрізняється тим, що визначають функцію площі перетину вхідної фігури та и копи, паралельно зсувають копію фігури і на кожному кроці зсуву визначають площу перетину вхідної фігури та и копи, проводять зсув до отримання площі перетину, яка дорівнює нулю, що відповідає максимальному зсуву у відповідному напрямку, перпендикулярному першому, і визначають для нього функцію перетину площин, порівнюють з еталонними значеннями функцію перетину площин і визначають класи фігур X та Y для кожного напрямку ВІДПОВІДНО, а шукану фігуру визначають на перетині отриманих множин фігур, які належать ВІДПОВІДНИМ класам X таУ Винахід відноситься до автоматики і обчислювальної техніки і може бути використаний при розпізнаванні плоских фігур в робототехніці, в системах технічного зору, при аналізі мікробіологічних препаратів і рентгенограм і т п Відомий спосіб розпізнавання геометричних фігур (АС СССР № 446087, 1974 г), заснований на скануванні і перетворенні зображення фігури в ні сигнали, виділяють в інтегральних сигналах ПОСЛІДОВНІСТЬ екстремальних рівнів, фіксують КІЛЬКІСТЬ екстремальних рівнів і глобальний екстремальний рівень у виділеній ПОСЛІДОВНОСТІ, по яких судять про фігуру, що розпізнається Недоліком даного способу є обмежена область використання, внаслідок неможливості розпізнавання не опуклих фігур, низька швидкодія, яка обумовлена необхідністю багаторазового сканування образу в напрямках е = 0,ті для його точр ної ідентифікації, низька завадостійкість, що виникає в разі попадання в область рецепторного поля сторонніх сигналів Найбільш близьким є спосіб розпізнавання геометричних фігур (А С СССР № 1376109, БИ № 7, 1988г), який заснований на скануванні і перетворенні зображення фігури в ПОСЛІДОВНІСТЬ широтно-модульованих імпульсів Сканують зображення фігури при безперервній ЗМІНІ кута сканування, перетворюють для кожного кута сканування ПОСЛІДОВНІСТЬ широтно-імпульсних сигналів в інтегральні сигнали, під час появи екстремальних рівнів інтегральних сигналів формують результуючі сигнали, що пропорційні ВІДПОВІДНИМ сигналам тимчасового відрахунку і обернено пропорційні ВІДПОВІДНИМ екстремальним рівням інтегральних сигналів, і по отриманій ПОСЛІДОВНОСТІ результуючих сигналів визначають фігуру, що розпізнається ПОСЛІДОВНІСТЬ широтно-модульованих імпульсів, построково сканують ділянки зображення об'єкту з наступним перетворенням у відеосигнали з одночасним формуванням сумарних сигналів і порівнянням з еталонними сигналами Недоліком даного способу є низька швидкодія, яка обумовлена необхідністю багаторазового сканування образу в напрямках е = 0,ті для його точр ної ідентифікації, обмежена область використання, внаслідок неможливості розпізнавання не опуклих фігур, низька завадостійкість, що виникає в разі попадання в область рецепторного поля сторонніх сигналів Відомий спосіб розпізнавання геометричних фігур (АС СССР № 1020840, БИ № 20, 1983 г), який заснований на скануванні і перетворенні зображення фігури в ПОСЛІДОВНІСТЬ широтномодульованих імпульсів, сканують зображення фігури при безперервній ЗМІНІ кута сканування, перетворюють для кожного кута сканування ПОСЛІДОВНІСТЬ широтно-імпульсних сигналів в інтеграль СО о 0 0 48903 Недоліком даного способу є низька завадостійкість, що виникає в разі попадання в область рецепторного поля сторонніх сигналів, низька швидкодія, яка обумовлена необхідністю багаторазового сканування образу в напрямках е = 0,ті р для його точної ідентифікації, обмежена область використання, внаслідок неможливості розпізнавання не опуклих фігур В основу винаходу поставлена задача створення способу розпізнавання плоских фігур на базі аналізу площин перетину однотипних об'єктів, в якому за рахунок введення нових операцій та їх ПОСЛІДОВНОСТІ досягається можливість зменшення КІЛЬКОСТІ напрямків сканування, що призводить до підвищення швидкодії, крім того досягається можливість розширити галузі використання Критерієм при розпізнаванні образів може бути площа фігури Площа фігури сама по собі несе інформацію тільки про величину об'єкту, а не про його форму Відомо багато програмних та апаратних методів обчислення площин плоских та тривимірних об'єктів різної форми Знаючи площу фігури та одиницю площі, можна отримати приблизне уявлення про розмір фігури, але розпізнавання в даному випадку не можливе Для розпізнавання образів необхідно ввести динаміку зміни площини зображення, що розпізнається Поставлена задача вирішується тим, що спосіб для розпізнавання плоских фігур полягає в тому, що сканують і перетворюють зображення в ПОСЛІДОВНІСТЬ сигналів, визначають функцію площі перетину вхідної фігури та и копи, паралельно зсувають копію фігури і на кожному кроці зсуву визначають площу перетину вхідної фігури та и копи, проводять зсув до отримання площі перетину, яка дорівнює нулю, що відповідає максимальному зсуву у відповідному напрямку, визначають функцію площини перетину в процесі зсуву, зсувають копію фігури в напрямку, перпендикулярному першому, і визначають для нього функцію перетину площин, порівнюють з еталонними значеннями функцію перетину площин, і визначають класи фігур Х т а У для кожного напрямку, ВІДПОВІДНО, а шукану фігуру визначають на перетині отриманих множин фігур, які належать, ВІДПОВІДНИМ класам Хта У для класу фігур (X), які відрізняються одна від одної тільки взаємним положенням складових, розташованих в напрямку зсуву (фіг 2) Для однозначної ідентифікації фігури необхідно провести визначення ще одної функції площини перетину (ФПП) в напрямку, який співпадає з першим Отримуємо ФПП для класу фігур Y Шукана фігура лежить на перетині множин X і Y Нехай образи, що досліджуються, відображені на рецепторному полі М х N елементів Для зручності зсув будемо проводити по горизонталі для отримання ФПП(х) та по вертикалі для отримання ФПП(у) Основними параметрами функції площини перетину будуть So (площа вхідного зображення) та Х т а х та Ymax (значення максимальних зсувів ВІДПОВІДНО у горизонтальному та вертикальному напрямках) Кожна зчитана фігура однозначно задається парою функцій площин перетину ФПП(х) та ФПП(у) Отримані функції площини перетину порівнюються з еталонним ФПП У випадку, коли образи, що розпізнаються, відносяться до опуклих простих фігур (коло, квадрат, прямокутник, трикутник і т п), ФПП яких можуть бути аналогічно визначені за допомогою основних параметрів (So, X max , Ymax), еталонні функції будуються по формулах Еталони фігур, для яких аналітичне визначення ФПП не можливе (неправильні, не опуклі зображення з декількох ізольованих частин), зберігаються у вигляді поверхонь, що складаються з ФПП(ф) при скануванні еталонної фігури в напрямках ф = 0,Зті/2 Зменшення КІЛЬКОСТІ напрямків векторів сканування від е = 0 до е = Зті/2, а не е = 2ті, р р р при формуванні еталонної поверхні обумовлено тим, що для вибраного критерію, покладеного в основу способу, образ володіє симетричністю Таким чином еталоні ФПП(х) та ФПП(у) задаються частинами еталонної поверхні в напрямках скану На фіг 1 приведено зображення фігур та їх копій з графіком змін площі перетину при зсуві, на фіг 2 приведено зображення фігур, які відрізняються взаємним положенням складових, розташованих в напрямку зсуву, на фіг 3 зображена блоксхема одного з можливих пристроїв, що реалізують запропонований спосіб розпізнавання Пристрій містить оптичну систему 1, блок 2 визначення ФПП(х) фігури, блок 3 визначення ФПП(у) фігури, блок генерації ФПП правильних фігур 4, схему порівняння 5, блок пам'яті 6, блок масштабування 7, блок керування 8 Запропонований спосіб розпізнавання образів базується на визначенні функції площі перетину вхідної фігури та и копи, що паралельно зсувається (фіг 1а) Зсув проводиться від положення повного співпадання фігури та її копи до моменту нульового перетину Загальну відстань, на яку переміститься зображення, назвемо максимальним зсувом Отримана таким чином функція площини перетину (фіг 16) від зсуву буде однаковою При порівнянні ФПП(х) образа, що досліджується, з еталонними функціями площини перетину, визначається клас X фігур, ФПП яких відрізняється від ФПП(х) для кожного х не більше, ніж на задану величину При цьому визначається напрямок ф*, для якого еталонна фігура була віднесена до класу X Потім ДЛЯ вибраних еталонів в напрямку фу = фк + ті/2 проводиться порівняння еталонної функції площини перетину з ФПП(у) для визначення фігур, які входять до класу Y На перетині множин X та Y знаходиться еталон шуканої фігури вання ВІДПОВІДНО фх= -7і/2,ті/2 та е = О,тг На ДІЛЯНЦІ р ВІД ф = 0 до ф = ті/2 ФПП(х) та ФПП(у) мають однакові значення Для порівняння зчитаних ФПП та ФПП еталонів останні масштабуються таким чином, щоб їх основні параметри співпадали з основними параметрами зчитаних функцій Запропонований спосіб розпізнавання фігур базується на критерії, інваріантному відносно такого афінного перетворення, як паралельний зсув При ЗМІНІ розмірів фігури її функції площини перетину не змінюють форми, та легко масштабуються за розмірами Немає необхідності проводити визначення ФПП у всіх напрямках, тому що значення ФПП для всіх можливих напрямків зберігається у вигляді еталонних поверхонь Внаслідок цього 48903 розпізнавання зображення можливе незалежно від кута його повороту за наявності ВІДПОВІДНОГО еталону Пристрій працює наступним чином За командою блока керування 8 оптична система 1 сприймає зображення фігури, що розпізнається Інформація передається на блок 2 визначення ФПП(х) фігури і блок 3 визначення ФПП(у) фігури, де проходить генерація ФПП(х) та ФПП(у) зчитаного зображення та паралельно визначаються основні параметри функції площини перетину (So, X m a x , Y m a x ) Дані 3 бЛОКу 2 ВИЗНЗЧЄННЯ ФПП(х) фігури і блоку 3 визначення ФПП(у) фігури передаються на блок генерації ФПП правильних фігур 4, де по основним параметрам (So, Xmax, Ymax) за аналітичними формулами формуються еталонні ФПП Еталонні ФПП в схемі порівняння 5 із заданою точністю dS порівнюються з ФПП, визначеним блоком 2 визначення ФПП(х) фігури і блоком З визначення ФПП(у) фігури Якщо для простих фігур співпадання функції площини перетину по обом напрямкам для всіх х та у не відбулося, блок керування дає команду пошуку еталону в блоці пам'яті 6 серед фігур, ФПП яких не можливо визначити аналітично Еталонні ФПП передаються на блок масштабування 7, де масштабуються у ВІДПОВІДНОСТІ із значеннями основних параметрів (So, Xmax, Ymax) Промасштабовані еталони схемою порівняння 5 із заданою точністю dS порівнюються з ФПП, визначеними блоком 2 визначення ФПП(х) фігури і блоком 3 визначення ФПП(у) фігури При співпаданні еталонних функцій площини перетину по обом напрямкам для всіх х та у з ФПП фігури, що розпізнається, вхідне зображення ідентифікується, як даний еталон Якщо ні одного еталону, ідентичного вхідному зображенню, не знайдено, дане зображення повинно бути занесено до блоку пам'яті 6, як новий еталон, шляхом визначення ФПП фігури в напрямках е = 0,Зті/2 для створення р еталонної поверхні б) S Sn — 11 Г П Ш І і MTU і І j т і т і ФігЛ 48903 В ФПП(х)А = ФПЩх)в=ФПЦх)ь ФІГ.2 dS I Фіг.З ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for identifying plane geometric figures
Автори англійськоюBilan Stepan Mykolaiovych
Назва патенту російськоюСпособ распознавания плоских геометрических фигур
Автори російськоюБилан Степан Николаевич
МПК / Мітки
Мітки: плоских, фігур, спосіб, геометричних, розпізнавання
Код посилання
<a href="https://ua.patents.su/4-48903-sposib-rozpiznavannya-ploskikh-geometrichnikh-figur.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання плоских геометричних фігур</a>
Спосіб розпізнавання зображень
Номер патенту: 39442
Опубліковано: 15.06.2001
Автори: Остап Олег Петрович, Остап Володимир Петрович, Русин Богдан Павлович
МПК: G06K 9/68
Мітки: зображень, спосіб, розпізнавання
Формула / Реферат:
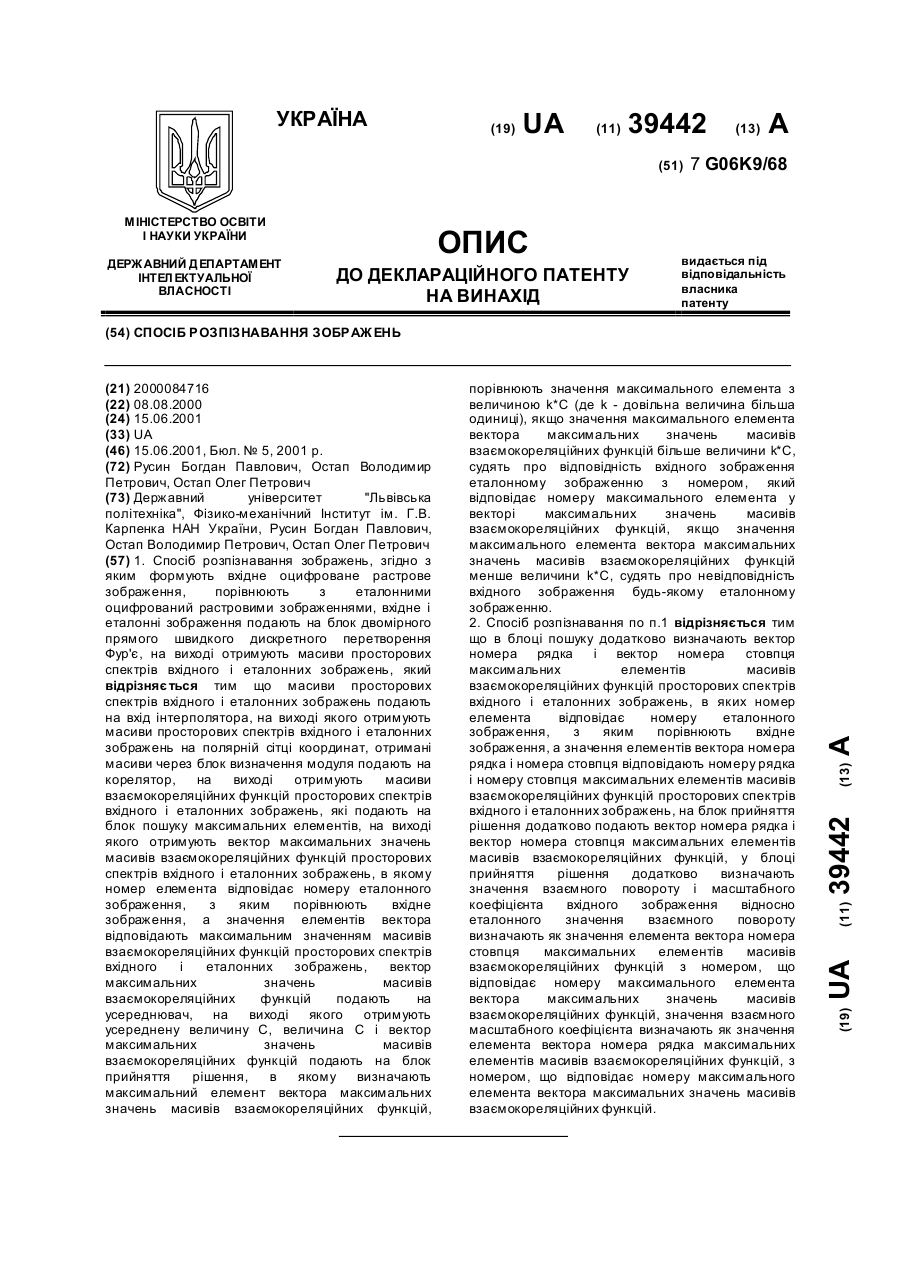
1. Спосіб розпізнавання зображень, згідно з яким формують вхідне оцифроване растрове зображення, порівнюють з еталонними оцифрованими растровими зображеннями, вхідне і еталонні зображення подають на блок двомірного прямого швидкого дискретного перетворення Фур'є, на виході отримують масиви просторових спектрів вхідного і еталонних зображень, який відрізняється тим, що масиви просторових спектрів вхідного і еталонних зображень подають на вхід...
Оптична система з виділенням рухомих фігур
Номер патенту: 28745
Опубліковано: 16.10.2000
Автор: Чугуй Володимир Леонідович
МПК: G02B 23/00
Мітки: виділенням, рухомих, фігур, система, оптична
Формула / Реферат:
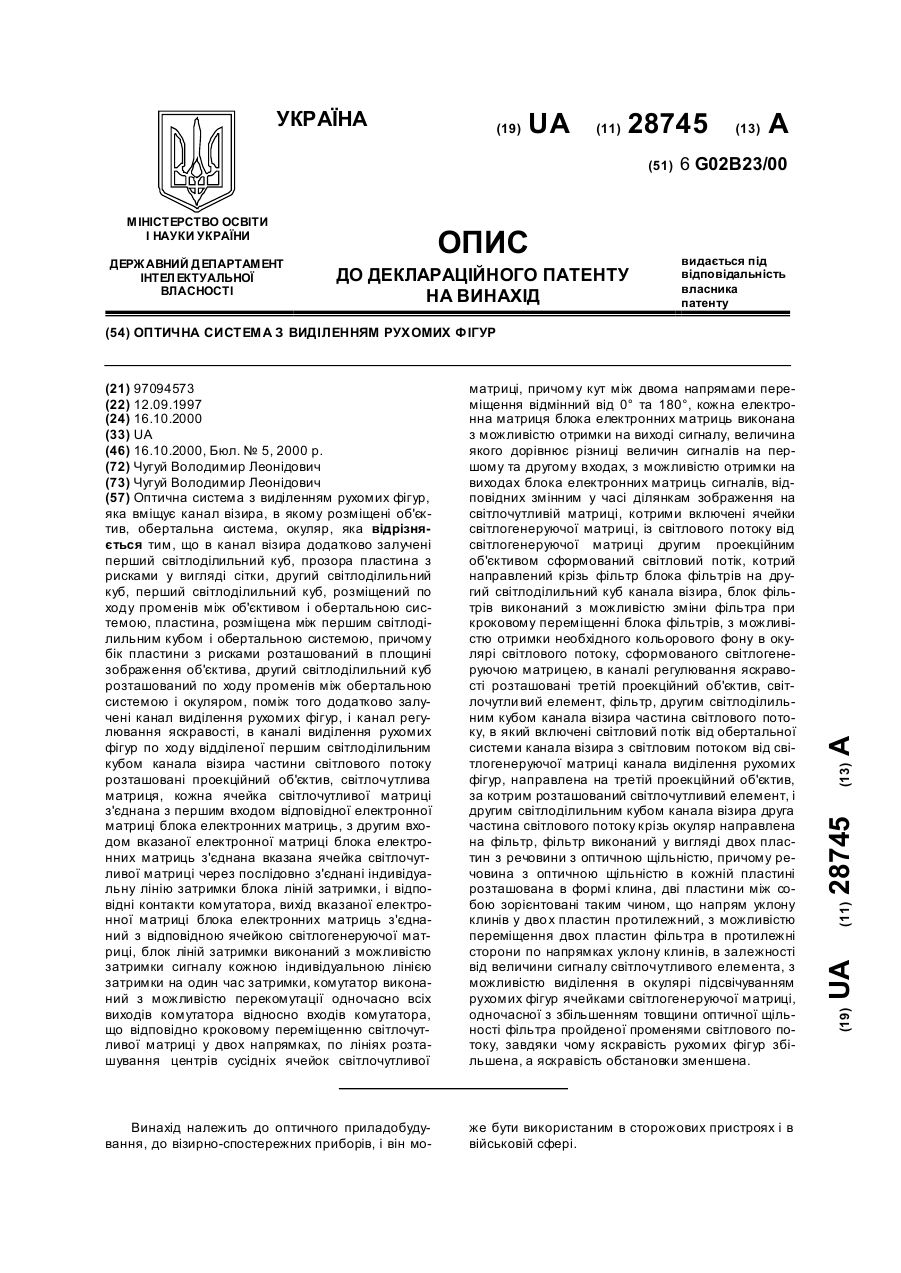
Оптична система з виділенням рухомих фігур, яка вміщує канал візира, в якому розміщені об’єктив, обертальна система, окуляр, яка відрізняється тим, що в канал візира додатково залучені перший світлоділильний куб, прозора пластина з рисками у вигляді сітки, другий світлоділильний куб, перший світлоділильний куб, розміщений по ходу променів між об’єктивом і обертальною системою, пластина, розміщена між першим світлоділильним кубом і...
Спосіб розпізнавання об’єкта за зональними інфрачервоними аерознімками
Номер патенту: 32212
Опубліковано: 15.12.2000
Автор: Станкевич Сергій Арсенійович
МПК: G01S 17/00
Мітки: зональними, спосіб, розпізнавання, об'єкта, аерознімками, інфрачервоними
Текст:
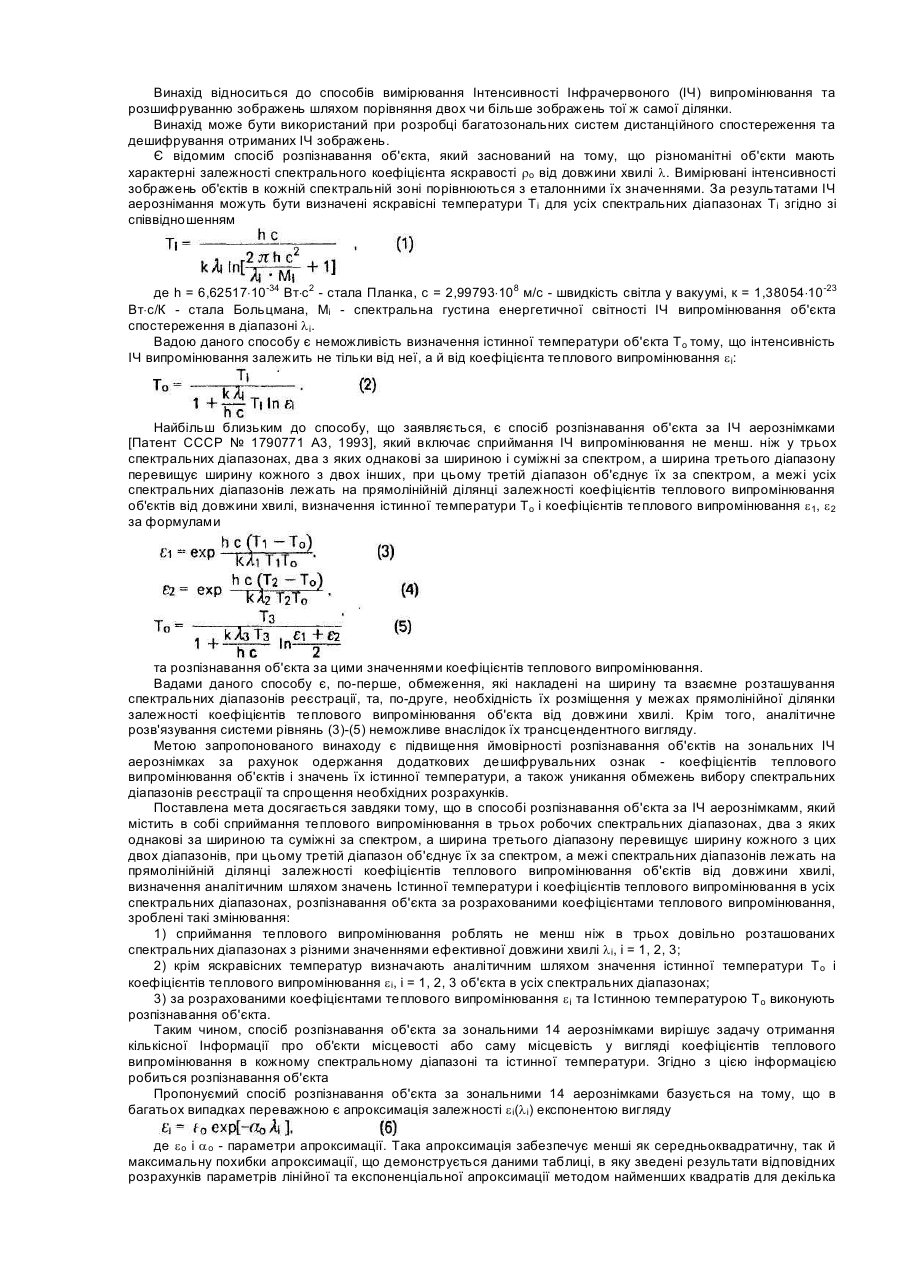
...розпізнавання об'єкта за зональними інфрачервоними аерознімками [3], який грунтується на апроксимації залежності 6^(Л) експонентою вигляду є( = Єо ехр( ~ щ А() , (5) де єо і CCQ - невідомі параметри апроксимації, та включає сприймання теплового випромінювання не менш ніж в трьох довільно розташованих спектральних діапазонах з різними значеннями ефективної довжини хвилі, визначення істинної температури Т о і коефіцієнтів теплового...
Спосіб автоматичного розпізнавання номера тварини по його коду

Номер патенту: 33370
Опубліковано: 15.02.2001
Автори: Кислун Олег Андрійович, Ващенко Борис Іванович, Березюк Сергій Вікторович, Версаль Віктор Олександрович
МПК: A01K 29/00
Мітки: розпізнавання, автоматичного, коду, тварини, спосіб, номера
Текст:
...параметра і формуванні кода номера тварини, згідно винаходу завдання значення порогів г\ь визначається окремо для кожної к-ї фіксованої частоти та виконується шляхом запам'ятовування їх значень після обчислення ча формулою' flk=Kk-M(Ak|H0), (1) де Кк - коефіцієнт, що визначається конструктивною особливістю джерела електромагнітного поля, та встановлюється окремо для кожної фіксованої частоти; M(AiJHo) - математичне чекання...
Спосіб розпізнавання об’єкта за зональними інфрачервоними аерознімками
Номер патенту: 23143
Опубліковано: 30.06.1998
Автори: Фроленко Володимир Миколайович, Станкевич Сергій Арсенійович
МПК: G01S 17/00
Мітки: аерознімками, спосіб, інфрачервоними, зональними, об'єкта, розпізнавання
Формула / Реферат:
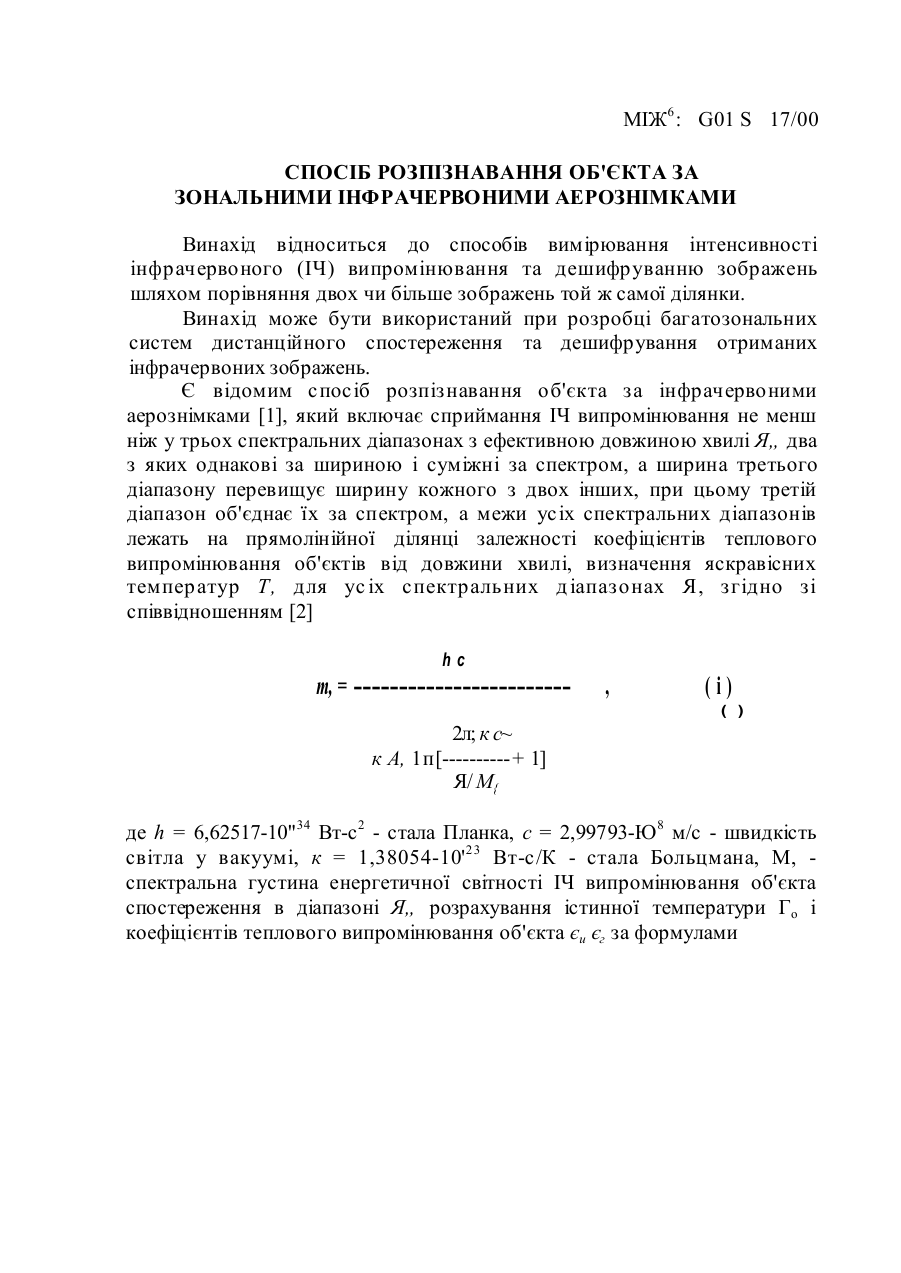
Спосіб розпізнавання об'єкта за зональними інфрачервоними аерознімками, який включає сприймання теплового випромінювання в трьох спектральних діапазонах, два з яких однакові за шириною і суміжні за спектром, а ширина третього діапазону перевищує ширину кожного з двох Інших, при цьому третій діапазон об'єднує їх за спектром, а межі усіх спектральних діапазонів лежать на прямолінійній ділянці залежності коефіцієнтів теплового випромінювання...
Попередній патент: Система сигналізації для випадків нанесення збитків
Наступний патент: Краплинний зрошувальний пристрій
Випадковий патент: Мікроелектронний пристрій для вимірювання магнітної індукції з активним індуктивним елементом