Спосіб посадки літального апарата
Номер патенту: 52597
Опубліковано: 25.08.2010
Автори: Тупіцин Микола Федорович, Тупіцина Наталія Миколаївна

Формула / Реферат
Спосіб посадки літального апарата, за яким вимикають двигуни літального апарата та гальмують його у заданому районі посадки, який відрізняється тим, що гальмування здійснюють створеним штучним повітряним потоком від газодинамічної установки, яка є основною, літальний апарат направляють за дотичною до вісі цього штучного повітряного потоку, швидкість якого зменшують до нуля при вході центра мас літального апарата в простір над заданим районом посадки, одночасно вмикають додаткову газодинамічну установку, що створює додатковий штучний повітряний потік, та здійснюють вимикання двигунів літального апарата і закріплюють його при торканні ним заданого району посадки.
Текст
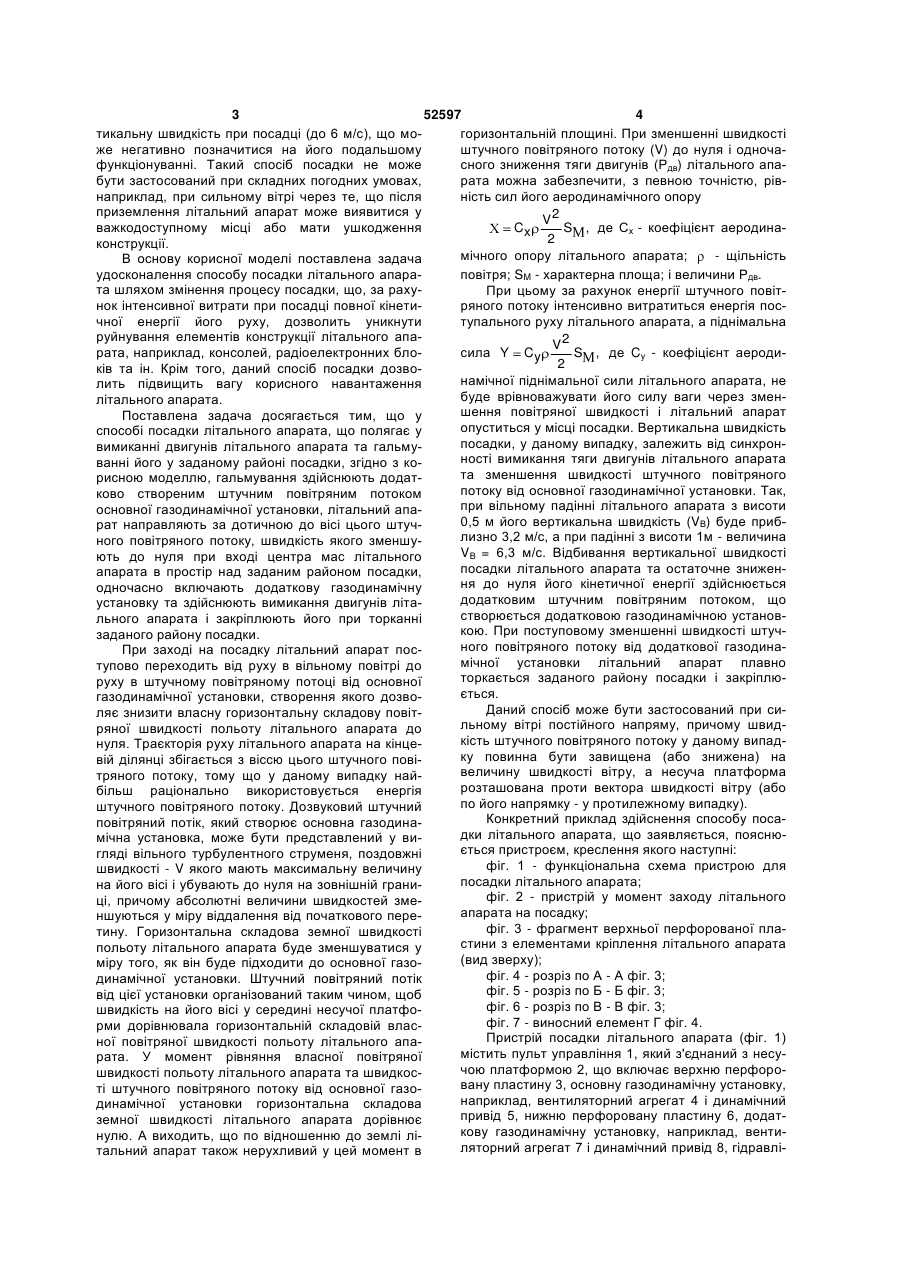
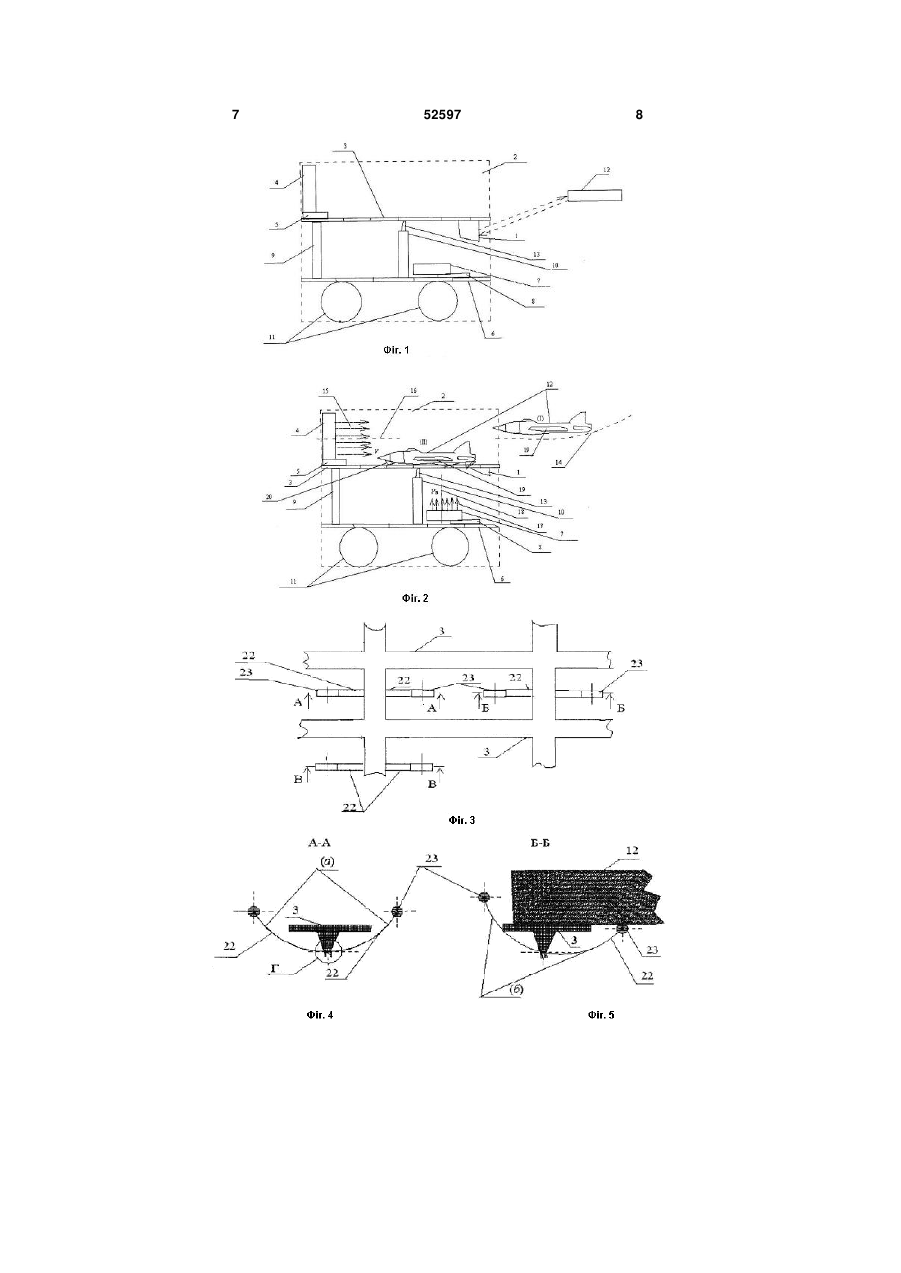
Спосіб посадки літального апарата, за яким вимикають двигуни літального апарата та гальмують його у заданому районі посадки, який відрізняється тим, що гальмування здійснюють створе 3 52597 4 тикальну швидкість при посадці (до 6 м/с), що могоризонтальній площині. При зменшенні швидкості же негативно позначитися на його подальшому штучного повітряного потоку (V) до нуля і одночафункціонуванні. Такий спосіб посадки не може сного зниження тяги двигунів (Рдв) літального апабути застосований при складних погодних умовах, рата можна забезпечити, з певною точністю, рівнаприклад, при сильному вітрі через те, що після ність сил його аеродинамічного опору приземлення літальний апарат може виявитися у V2 важкодоступному місці або мати ушкодження Cx S , де Сх - коефіцієнт аеродина2 конструкції. мічного опору літального апарата; - щільність В основу корисної моделі поставлена задача удосконалення способу посадки літального апараповітря; SM - характерна площа; і величини Рдв. та шляхом змінення процесу посадки, що, за рахуПри цьому за рахунок енергії штучного повітнок інтенсивної витрати при посадці повної кінетиряного потоку інтенсивно витратиться енергія посчної енергії його руху, дозволить уникнути тупального руху літального апарата, а піднімальна руйнування елементів конструкції літального апаV2 рата, наприклад, консолей, радіоелектронних блосила Y Cy S , де Cу - коефіцієнт аероди2 ків та ін. Крім того, даний спосіб посадки дозвонамічної піднімальної сили літального апарата, не лить підвищить вагу корисного навантаження буде врівноважувати його силу ваги через зменлітального апарата. шення повітряної швидкості і літальний апарат Поставлена задача досягається тим, що у опуститься у місці посадки. Вертикальна швидкість способі посадки літального апарата, що полягає у посадки, у даному випадку, залежить від синхронвимиканні двигунів літального апарата та гальмуності вимикання тяги двигунів літального апарата ванні його у заданому районі посадки, згідно з кота зменшення швидкості штучного повітряного рисною моделлю, гальмування здійснюють додатпотоку від основної газодинамічної установки. Так, ково створеним штучним повітряним потоком при вільному падінні літального апарата з висоти основної газодинамічної установки, літальний апа0,5 м його вертикальна швидкість (VВ) буде прибрат направляють за дотичною до вісі цього штучлизно 3,2 м/с, а при падінні з висоти 1м - величина ного повітряного потоку, швидкість якого зменшуVВ = 6,3 м/с. Відбивання вертикальної швидкості ють до нуля при вході центра мас літального посадки літального апарата та остаточне зниженапарата в простір над заданим районом посадки, ня до нуля його кінетичної енергії здійснюється одночасно включають додаткову газодинамічну додатковим штучним повітряним потоком, що установку та здійснюють вимикання двигунів літастворюється додатковою газодинамічною установльного апарата і закріплюють його при торканні кою. При поступовому зменшенні швидкості штучзаданого району посадки. ного повітряного потоку від додаткової газодинаПри заході на посадку літальний апарат посмічної установки літальний апарат плавно тупово переходить від руху в вільному повітрі до торкається заданого району посадки і закріплюруху в штучному повітряному потоці від основної ється. газодинамічної установки, створення якого дозвоДаний спосіб може бути застосований при силяє знизити власну горизонтальну складову повітльному вітрі постійного напряму, причому швидряної швидкості польоту літального апарата до кість штучного повітряного потоку у даному випаднуля. Траєкторія руху літального апарата на кінцеку повинна бути завищена (або знижена) на вій ділянці збігається з віссю цього штучного повівеличину швидкості вітру, а несуча платформа тряного потоку, тому що у даному випадку найрозташована проти вектора швидкості вітру (або більш раціонально використовується енергія по його напрямку - у протилежному випадку). штучного повітряного потоку. Дозвуковий штучний Конкретний приклад здійснення способу посаповітряний потік, який створює основна газодинадки літального апарата, що заявляється, пояснюмічна установка, може бути представлений у виється пристроєм, креслення якого наступні: гляді вільного турбулентного струменя, поздовжні фіг. 1 - функціональна схема пристрою для швидкості - V якого мають максимальну величину посадки літального апарата; на його вісі і убувають до нуля на зовнішній гранифіг. 2 - пристрій у момент заходу літального ці, причому абсолютні величини швидкостей змеапарата на посадку; ншуються у міру віддалення від початкового перефіг. 3 - фрагмент верхньої перфорованої платину. Горизонтальна складова земної швидкості стини з елементами кріплення літального апарата польоту літального апарата буде зменшуватися у (вид зверху); міру того, як він буде підходити до основної газофіг. 4 - розріз по А - А фіг. 3; динамічної установки. Штучний повітряний потік фіг. 5 - розріз по Б - Б фіг. 3; від цієї установки організований таким чином, щоб фіг. 6 - розріз по В - В фіг. 3; швидкість на його вісі у середині несучої платфофіг. 7 - виносний елемент Г фіг. 4. рми дорівнювала горизонтальній складовій власПристрій посадки літального апарата (фіг. 1) ної повітряної швидкості польоту літального апамістить пульт управління 1, який з'єднаний з несурата. У момент рівняння власної повітряної чою платформою 2, що включає верхню перфорошвидкості польоту літального апарата та швидкосвану пластину 3, основну газодинамічну установку, ті штучного повітряного потоку від основної газонаприклад, вентиляторний агрегат 4 і динамічний динамічної установки горизонтальна складова привід 5, нижню перфоровану пластину 6, додатземної швидкості літального апарата дорівнює кову газодинамічну установку, наприклад, вентинулю. А виходить, що по відношенню до землі ліляторний агрегат 7 і динамічний привід 8, гідравлітальний апарат також нерухливий у цей момент в 5 52597 6 чні підйомники 9 і 10, надувні балони 11. Крім того, ранного ефекту, який буде заважати посадці літапульт управління 1 має радіозв'язок з літальним льного апарата 12. Крім того, перфоровані пласапаратом 12. Перфоровані пластини 3 та 6 зв'язані тини 3 і 6 необхідні для функціонування додаткогідравлічним підйомником 9 та гідравлічним підйового вентиляторного агрегату 7. мником 10 з шарнірною стійкою 13 зверху. Нижня У випадку відхилення прогнозованої траєкторії перфорована пластина 6 закріплена на надувних 14 літального апарата 12 від вісі 16 штучного повібалонах 11. тряного потоку від основного вентиляторного агреПристрій (фіг. 2) у момент заходу літального гату 4 у горизонтальній площині, по сигналу з апарата 12 на посадку по траєкторії 14; - положенпульта управління 1, досягають їхнє сполучення ня (І), причому на краю верхньої перфорованої шляхом переміщення у поперечному напрямку пластини 3 розміщений вентиляторний агрегат 4, несучої платформи 2, основного вентиляторного котрий є джерелом штучного повітряного потоку агрегату 4 і додаткового вентиляторного агрегату 15 у вигляді струменя з віссю 16, а на нижній пер7 за допомогою динамічного приводу 5. У випадку форованій пластині 6 розміщений додатковий венвідхилення посадкової траєкторії 14 літального тиляторний агрегат 7, який також є джерелом доапарата 12 від горизонтальної площини на певний даткового штучного повітряного потоку 17 у кут по сигналу з пульта управління 1 здійснюють вигляді струменя з віссю 18, що направлений на нахил перфорованої пластини 6 на той же кут за центр мас 19 літального апарата 12. Обидва вендопомогою шарнірної стійки 13 та гідравлічних тиляторні агрегати 4 і 7 зв'язані з динамічним припідйомників 9 і 10. При вході літального апарата 12 водом 5. Крім того, додатковий вентиляторний в простір над перфорованою пластиною 3 (полоагрегат 7, зв'язаний з динамічним приводом 8. У ження (І) на фіг. 2) та зменшення швидкості набіположенні (II) літального апарата 12 показана його гаючого потоку від основного вентиляторного агфіксація за допомогою елементів закріплення 20 регату 4, одночасно вимикають двигуни літального на верхній перфорованій пластині 3. апарата 12. За рахунок різниці підйомної сили та Кожний з елементів закріплення 20 (фіг. 3) висили ваги, літальний апарат 12 повинен знижуваконаний у вигляді пружного коромисла 21 з двома тися відносно перфорованої пластини 3 з елеменоднаковими плечима 22, які у залежності від затами кріплення 20 та торкатися її. Гасіння кінетичгрузки займають: ної енергії вертикального руху літального апарата положення (а) - обидва плеча 22 не заванта12 здійснюють за рахунок штучного повітряного жені (фіг. 4); потоку від додаткового вентиляторного агрегату 7, положення (б) - одне із плечей 22 не завантаякий по сигналу з пульта управління 1 включають, жено, а другі плечі 22 будуть підніматися над пері за допомогою динамічного приводу 8 здійснюють форованою пластиною 3, створюючи шорсткувату рух у поздовжньому напрямку на перфорованій поверхню (фіг. 5) з роликами 23 на кінцях плечей пластині 6 із швидкістю, що дорівнює швидкості 22 коромисел 21; літального апарата 12 відносно землі при вході положення (в) - обидва плеча 22 завантажені центра мас 19 літального апарата в простір над (фіг. 6). несучою платформою 2. Швидкість штучного повіВиносний елемент Г являє собою - плечі 22, тряного потоку 17 від додаткового вентиляторного коромисла 21, які мають один ступінь свободи агрегату 7 визначають вертикальною швидкістю кутове переміщення у вертикальній площині за зниження літального апарата 12 й задають з пульрахунок кульової опори 24, встановленої у проріз та управління 1, а його вісь 18 спрямовують на 25 нижньої конусоподібної частини перфорованої центр мас 19. При торканні літального апарата 12 пластини 3 (фіг. 7). перфорованої пластини 3, частина коромисел 21 Спосіб посадки літального апарата здійснювід елементів закріплення 20, під дією ваги літальється таким чином: ного апарата 12, опустить свої плечі 22, причому При підльоті літального апарата 12 до несучої інші плечі 22 цих коромисел 21, за рахунок власплатформи 2 по сигналу з пульта управління 1 тивості пружності і особливостей закріплення кувключають основний вентиляторний агрегат 4, з льової опори 23, мусять піднятися. Частина елезаданою швидкістю штучного повітряного потоку ментів закріплення 20 переходить із положення (а) 15, яка у середині перфорованої пластини 3, дорі– не навантажене положення коромисла 21, в повнює власній повітряній швидкості польоту літальложення (б) - одне з плечей 22 коромисла 21 наного апарата 12, причому перфорована пластина вантажено, а друге плече 22, піднімаючись над 3 з основним вентиляторним агрегатом 4 орієнтоперфорованою пластиною 3 створює шорсткувату вана під необхідним кутом відносно лінії горизонту поверхню, - і таким чином літальний апарат 12 в просторі за допомогою шарнірної стійки 13, з'єдзакріплюється піднятими плечима 22 з роликами наної з гідравлічним підйомником 10, та підйомни23 на їх кінцях без ушкоджень елементів конструкком 9, а літальний апарат 12 спрямовують по трації (положення (II) на фіг. 2). Друга частина елемеєкторії 14, дотичній до вісі 16 штучного повітряного нтів закріплення 20 переходить із положення (а) в потоку 15. положення (в) - обидва плеча 22 коромисла 21 Перфорована пластина 3 необхідна для рівнавантажені літальним апаратом 12 і також закріномірності штучного повітряного потоку від основплюють його. ного вентиляторного агрегату 4 і запобігання ек 7 52597 8 9 Комп’ютерна верстка В. Мацело 52597 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of landing aircraft
Автори англійськоюTupitsyn Mykola Fedorovych, Tupitsyna Natalia Mykolaivna
Назва патенту російськоюСпособ посадки летательного аппарата
Автори російськоюТупицин Николай Федорович, Тупицина Наталья Николаевна
МПК / Мітки
МПК: B64C 25/00, B64F 1/00
Мітки: посадки, апарата, спосіб, літального
Код посилання
<a href="https://ua.patents.su/5-52597-sposib-posadki-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб посадки літального апарата</a>
Пристрій для посадки літального апарата
Номер патенту: 34342
Опубліковано: 11.08.2008
Автори: Слєпов Лев Іванович, Блаженний Валерій Іванович, Гладков Віктор Михайлович, Якобінчук Олександр Вікторович, Куровська Тетяна Юріївна
МПК: B64F 1/00
Мітки: посадки, літального, пристрій, апарата
Формула / Реферат:
1. Пристрій для посадки літального апарата, який містить посадкову смугу, гальмівний пристрій, який відрізняється тим, що додатково містить транспортну платформу, що містить двигун, пристрій вимірювання координат і швидкості літального апарата, пристрій керування, приймач, при цьому посадкова смуга виконана як пристрій фіксації літального апарата, причому гальмівний пристрій розташовано на транспортній платформі.2. Пристрій для посадки...
Спосіб посадки літального апарата
Номер патенту: 44843
Опубліковано: 12.10.2009
Автори: Слєпов Лев Іванович, Герасименко Володимир Вікторович, Бондік Олександр Сергійович
МПК: B64D 45/00
Мітки: літального, спосіб, апарата, посадки
Формула / Реферат:
Спосіб посадки літального апарата, при якому здійснюють посадку на ґрунт або на бетонну злітно-посадочну смугу, який відрізняється тим, що здійснюють фіксацію фюзеляжу літального апарата вздовж повздовжньої осі напрямку посадки за допомогою рухомого пристрою посадки літального апарата.
Пристрій посадки літального апарата
Номер патенту: 52596
Опубліковано: 25.08.2010
Автори: Тупіцин Микола Федорович, Тупіцина Наталія Миколаївна
МПК: B64C 25/00, B64F 1/00
Мітки: літального, апарата, посадки, пристрій
Формула / Реферат:
Пристрій посадки літального апарата, що складається з несучої платформи на двох надувних балонах та газодинамічної установки, який відрізняється тим, що несуча платформа містить дві - верхню і нижню - перфоровані пластини, які з'єднані з однієї сторони через стійку з одним шарніром і гідравлічним підйомником, а з іншої - з другим гідравлічним підйомником, причому на ребрах верхньої перфорованої пластини, зв'язаної з газодинамічною...
Пристрій для вертикальної посадки літального апарата
Номер патенту: 8663
Опубліковано: 15.08.2005
Автори: Попель Анатолій Михайлович, Гончаров Олександр Дмитрович, Домбровський Роман Антонович, Мокін Олександр Васильович, Філяєв Віктор Васильович, Мокін Андрій Олександрович
МПК: F42B 15/00, B64G 1/00
Мітки: посадки, літального, апарата, вертикальної, пристрій
Формула / Реферат:
1. Пристрій для вертикальної посадки літального апарата, що містить корпус з днищем, дві гнучкі оболонки тороїдальної форми з вузлами кріплення і дренажними клапанами, ємність тиску, систему подавання швидкотвердіючого матеріалу та парашутну систему, який відрізняється тим, що одна з гнучких оболонок встановлена всередині другої і між ними утворений зазор у області стикання з землею, а з протилежного боку гнучкі оболонки скріплені одна з...
Спосіб вимушеної посадки літального апарата на воду

Номер патенту: 15604
Опубліковано: 30.06.1997
Автори: Гонцова Ларіса Гєннадієвна, Іванов Віктор Михайлович, Бєлявскій Алєксандр Ніколаєвіч
МПК: B64C 25/00
Мітки: воду, вимушеної, спосіб, посадки, літального, апарата
Формула / Реферат:
Способ вынужденной посадки летательного аппарата на воду, снабженного трехопорным неубирающимся лыжным шасси с носовой опорой, включающий снижение, выравнивание, выдерживание и пробег по воде, отличающийся тем, что на этапе снижения, путем постановки на упор, исключают поворот лыж при пробеге по воде основных опор в сторону отклонения на положительные углы, а носовой опоры - в сторону отклонения на отрицательные углы относительно исходных...
Попередній патент: Пристрій посадки літального апарата
Наступний патент: Спосіб хірургічного лікування ускладнених навколососочкових дуоденальних виразок
Випадковий патент: Процес оцінки забруднення води методом кхч-діелектрометрії