Пристрій для прямого визначення поперечної деформації циліндричного зразка

Формула / Реферат
Пристрій для прямого визначання поперечної деформації циліндричного зразка, котрий містить корпус, дві нерухомі опори, зафіксовані на корпусі у взаємно перпендикулярних напрямках, та дві рухомі опори, розташовані напроти нерухомих опор, який відрізняється тим, що рухомі опори установлені безпосередньо на корпусі, до кожної рухомої опори приєднані основний пружний елемент і гнучка нитка, причому кожна гнучка нитка сперта на свій нерухомий блок й з’єднана з рухомим блоком, установленим на штоку, до штока приєднаний допоміжний пружний елемент, сам шток установлений на корпусі, а зі штоком зв'язаний індикатор.
Текст
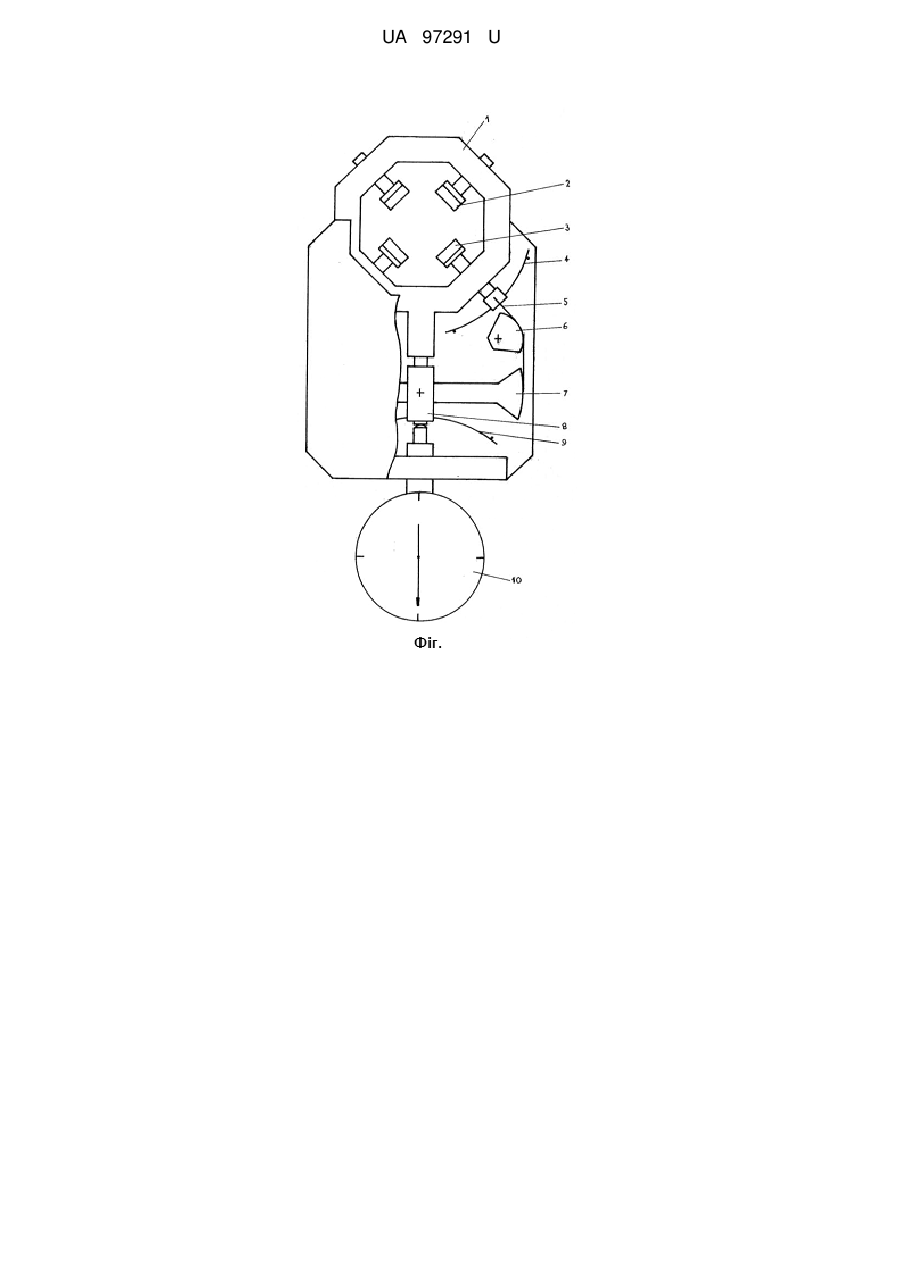
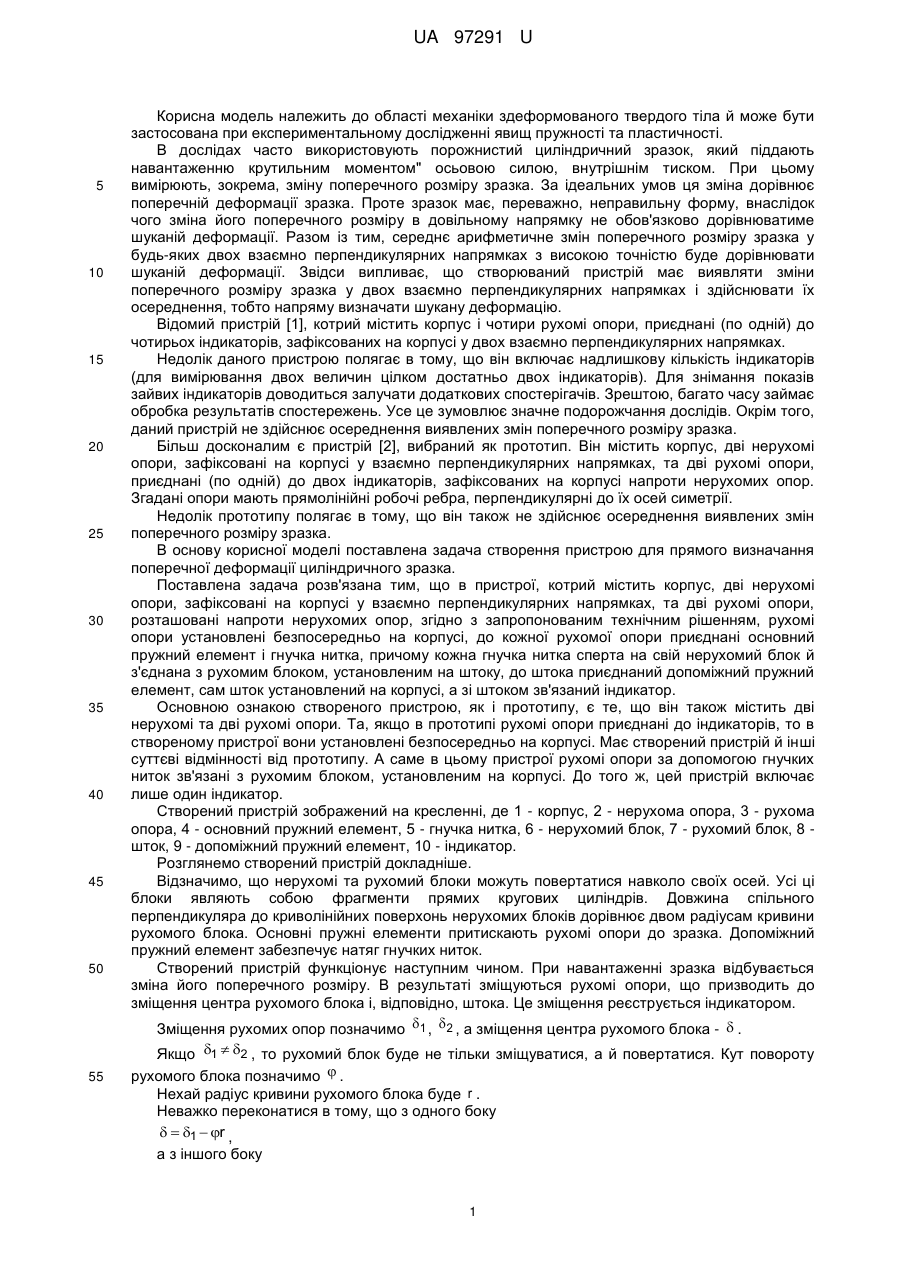
Реферат: UA 97291 U UA 97291 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області механіки здеформованого твердого тіла й може бути застосована при експериментальному дослідженні явищ пружності та пластичності. В дослідах часто використовують порожнистий циліндричний зразок, який піддають навантаженню крутильним моментом" осьовою силою, внутрішнім тиском. При цьому вимірюють, зокрема, зміну поперечного розміру зразка. За ідеальних умов ця зміна дорівнює поперечній деформації зразка. Проте зразок має, переважно, неправильну форму, внаслідок чого зміна його поперечного розміру в довільному напрямку не обов'язково дорівнюватиме шуканій деформації. Разом із тим, середнє арифметичне змін поперечного розміру зразка у будь-яких двох взаємно перпендикулярних напрямках з високою точністю буде дорівнювати шуканій деформації. Звідси випливає, що створюваний пристрій має виявляти зміни поперечного розміру зразка у двох взаємно перпендикулярних напрямках і здійснювати їх осереднення, тобто напряму визначати шукану деформацію. Відомий пристрій [1], котрий містить корпус і чотири рухомі опори, приєднані (по одній) до чотирьох індикаторів, зафіксованих на корпусі у двох взаємно перпендикулярних напрямках. Недолік даного пристрою полягає в тому, що він включає надлишкову кількість індикаторів (для вимірювання двох величин цілком достатньо двох індикаторів). Для знімання показів зайвих індикаторів доводиться залучати додаткових спостерігачів. Зрештою, багато часу займає обробка результатів спостережень. Усе це зумовлює значне подорожчання дослідів. Окрім того, даний пристрій не здійснює осереднення виявлених змін поперечного розміру зразка. Більш досконалим є пристрій [2], вибраний як прототип. Він містить корпус, дві нерухомі опори, зафіксовані на корпусі у взаємно перпендикулярних напрямках, та дві рухомі опори, приєднані (по одній) до двох індикаторів, зафіксованих на корпусі напроти нерухомих опор. Згадані опори мають прямолінійні робочі ребра, перпендикулярні до їх осей симетрії. Недолік прототипу полягає в тому, що він також не здійснює осереднення виявлених змін поперечного розміру зразка. В основу корисної моделі поставлена задача створення пристрою для прямого визначання поперечної деформації циліндричного зразка. Поставлена задача розв'язана тим, що в пристрої, котрий містить корпус, дві нерухомі опори, зафіксовані на корпусі у взаємно перпендикулярних напрямках, та дві рухомі опори, розташовані напроти нерухомих опор, згідно з запропонованим технічним рішенням, рухомі опори установлені безпосередньо на корпусі, до кожної рухомої опори приєднані основний пружний елемент і гнучка нитка, причому кожна гнучка нитка сперта на свій нерухомий блок й з'єднана з рухомим блоком, установленим на штоку, до штока приєднаний допоміжний пружний елемент, сам шток установлений на корпусі, а зі штоком зв'язаний індикатор. Основною ознакою створеного пристрою, як і прототипу, є те, що він також містить дві нерухомі та дві рухомі опори. Та, якщо в прототипі рухомі опори приєднані до індикаторів, то в створеному пристрої вони установлені безпосередньо на корпусі. Має створений пристрій й інші суттєві відмінності від прототипу. А саме в цьому пристрої рухомі опори за допомогою гнучких ниток зв'язані з рухомим блоком, установленим на корпусі. До того ж, цей пристрій включає лише один індикатор. Створений пристрій зображений на кресленні, де 1 - корпус, 2 - нерухома опора, 3 - рухома опора, 4 - основний пружний елемент, 5 - гнучка нитка, 6 - нерухомий блок, 7 - рухомий блок, 8 шток, 9 - допоміжний пружний елемент, 10 - індикатор. Розглянемо створений пристрій докладніше. Відзначимо, що нерухомі та рухомий блоки можуть повертатися навколо своїх осей. Усі ці блоки являють собою фрагменти прямих кругових циліндрів. Довжина спільного перпендикуляра до криволінійних поверхонь нерухомих блоків дорівнює двом радіусам кривини рухомого блока. Основні пружні елементи притискають рухомі опори до зразка. Допоміжний пружний елемент забезпечує натяг гнучких ниток. Створений пристрій функціонує наступним чином. При навантаженні зразка відбувається зміна його поперечного розміру. В результаті зміщуються рухомі опори, що призводить до зміщення центра рухомого блока і, відповідно, штока. Це зміщення реєструється індикатором. Зміщення рухомих опор позначимо 1 , 2 , а зміщення центра рухомого блока - . Якщо 1 2 , то рухомий блок буде не тільки зміщуватися, а й повертатися. Кут повороту рухомого блока позначимо . Нехай радіус кривини рухомого блока буде r . Неважко переконатися в тому, що з одного боку 1 r , а з іншого боку 1 UA 97291 U 5 10 2 r . Складаючи ці формули, отримаємо 1 2 2 Як бачимо, величина є середнім арифметичним величин 1 , 2 , тобто дорівнює шуканій величині. Отже, створений пристрій дозволяє напряму визначати поперечну деформацію циліндричного зразка. Джерела інформації: 1. Черняк Н.И. Механические свойства стали в области малых пластических деформаций. Киев: Изд-во АН УССР, 1962.-104 с. 2. Деклараційний патент України № 54741. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Пристрій для прямого визначання поперечної деформації циліндричного зразка, котрий містить корпус, дві нерухомі опори, зафіксовані на корпусі у взаємно перпендикулярних напрямках, та дві рухомі опори, розташовані напроти нерухомих опор, який відрізняється тим, що рухомі опори установлені безпосередньо на корпусі, до кожної рухомої опори приєднані основний пружний елемент і гнучка нитка, причому кожна гнучка нитка сперта на свій нерухомий блок й з’єднана з рухомим блоком, установленим на штоку, до штока приєднаний допоміжний пружний елемент, сам шток установлений на корпусі, а зі штоком зв'язаний індикатор. 2 UA 97291 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюKurchakov Yevheniy Yevheniyovych
Автори російськоюКурчаков Евгений Евгеньевич
МПК / Мітки
МПК: G01B 3/18
Мітки: визначення, прямого, зразка, поперечної, циліндричного, пристрій, деформації
Код посилання
<a href="https://ua.patents.su/5-97291-pristrijj-dlya-pryamogo-viznachennya-poperechno-deformaci-cilindrichnogo-zrazka.html" target="_blank" rel="follow" title="База патентів України">Пристрій для прямого визначення поперечної деформації циліндричного зразка</a>
Електромеханічний пристрій для вимірювання поперечної деформації циліндричного зразка
Номер патенту: 7679
Опубліковано: 15.07.2005
Автори: Тормахов Микола Миколайович, Курчаков Євгеній Євгенійович
Мітки: пристрій, поперечної, вимірювання, циліндричного, зразка, деформації, електромеханічний
Формула / Реферат:
Електромеханічний пристрій для вимірювання поперечної деформації циліндричного зразка, що містить корпус, дві рухомі опори, розташовані під прямим кутом на корпусі, два вимірювальні елементи (тензорезисторні), які оперті на корпус і свої рухомі опори, та дві пружини, з'єднані із корпусом, який відрізняється тим, що до пружин приєднані співвісно рухомим опорам дві вилки, а на корпусі розміщені напроти рухомих опор дві стаціонарні опори,...
Механічне пристосування для вимірювання поперечної деформації циліндричного зразка
Номер патенту: 54741
Опубліковано: 17.03.2003
Автор: Курчаков Євгеній Євгенійович
МПК: B23P 25/00, G01B 5/30
Мітки: деформації, вимірювання, циліндричного, пристосування, зразка, механічне, поперечної
Формула / Реферат:
Механічне пристосування для вимірювання поперечної деформації циліндричного зразка, яке містить корпус та чотири опори, робочі ребра яких прямолінійні, лежать в одній площині, яке відрізняється тим, що дві опори приєднані до двох індикаторів, установлених під прямим кутом на корпусі, а дві опори закріплені безпосередньо на корпусі (кожна навпроти свого індикатора), причому так, щоб робочі ребра будь-яких опор, розташованих одна навпроти...
Електромеханічний пристрій для вимірювання поперечної деформації плоского зразка
Номер патенту: 7681
Опубліковано: 15.07.2005
Автор: Курчаков Євгеній Євгенійович
Мітки: вимірювання, деформації, плоского, пристрій, поперечної, зразка, електромеханічний
Формула / Реферат:
Електромеханічний пристрій для вимірювання поперечної деформації плоского зразка, що містить корпус і два угнуті у протилежні боки тензорезисторні вимірювальні елементи, який відрізняється тим, що до корпусу приєднана стаціонарна опора, напроти стаціонарної опори розташована рухома опора, між корпусом і рухомою опорою поміщена пружина, а вимірювальні елементи приєднані до опор.
Датчик деформації для визначення подовження зразка при розтягуванні
Номер патенту: 82279
Опубліковано: 25.07.2013
Автори: Матюхов Сергій Олександрович, Івченко Олександр Васильович, Недогибченко Олександр Іванович
МПК: G01B 5/00
Мітки: визначення, зразка, розтягуванні, подовження, датчик, деформації
Формула / Реферат:
1. Датчик деформації для визначення подовження зразка при розтягуванні, переважно арматурного прокату чи дроту, що містить верхню і нижню опори у вигляді втулок, які кріпляться на випробувальному зразку, на відстані, рівному величині вимірювальної бази, і вимірювач переміщення, розміщений паралельно зразку між верхньою і нижньою опорами, який відрізняється тим, що втулки співвісно закріплені на випробувальному зразку за допомогою притискних...
Датчик деформації для визначення подовження зразка при розтягуванні
Номер патенту: 82278
Опубліковано: 25.07.2013
Автори: Анісімкін Валерій Вікторович, Селегей Андрій Миколайович, Мачуська Ніоніла Данилівна, Івченко Олександр Васильович
МПК: G01B 5/00
Мітки: розтягуванні, подовження, зразка, визначення, датчик, деформації
Формула / Реферат:
1. Датчик деформації для визначення подовження зразка при розтягуванні, переважно з арматурного прокату чи дроту, що містить верхню і нижню опори у вигляді втулок, які укріплені на випробувальному зразку, на відстані, рівній величині вимірювальної бази, і вимірювач переміщення, розміщений паралельно зразку між верхньою і нижньою опорами, який відрізняється тим, що втулки нерухомо укріплені на кінцях телескопічних трубок, що переміщуються...
Попередній патент: Вузол очищення сирцю з лляної трести м’яльно-тіпального агрегату
Наступний патент: Емульсійна вибухова речовина “анемікс-1″
Випадковий патент: Формувач одиночної двоімпульсної кодової серії з програмованими часовими параметрами