Електромагнітно-акустичний перетворювач на рухомій платформі
Номер патенту: 105998
Опубліковано: 11.04.2016
Автори: Подолян Олександр Олександрович, Архипенко Богдан Олександрович

Формула / Реферат
Електромагнітно-акустичний перетворювач на рухомій платформі, що складається з паралельних один одному магнітоводів, встановлених перпендикулярно до місця контролю на поверхні об'єкта контролю, між якими з однієї сторони розташований магніт, а з іншої сторони розташований плоский провідниковий випромінювач, при цьому перетворювач кріпиться на пересувній платформі, на якій встановлений механізм переміщення, що дозволяє пересуватися платформі, та механізм руху, що дозволяє перетворювачу рухатись у напрямку, перпендикулярному до місця контролю на поверхні об'єкта контролю, який відрізняється тим, що як механізм руху використовується пружний елемент.
Текст
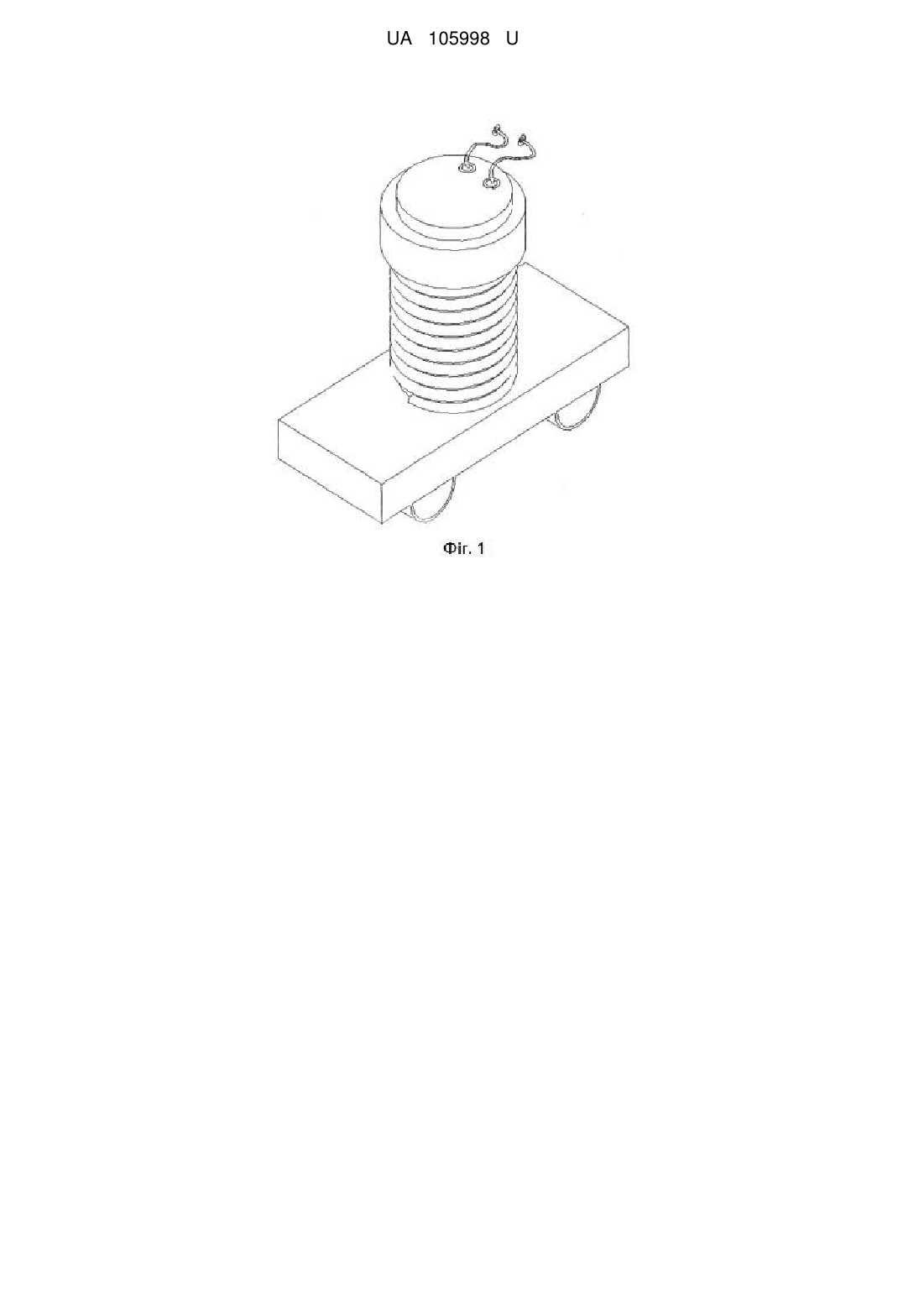
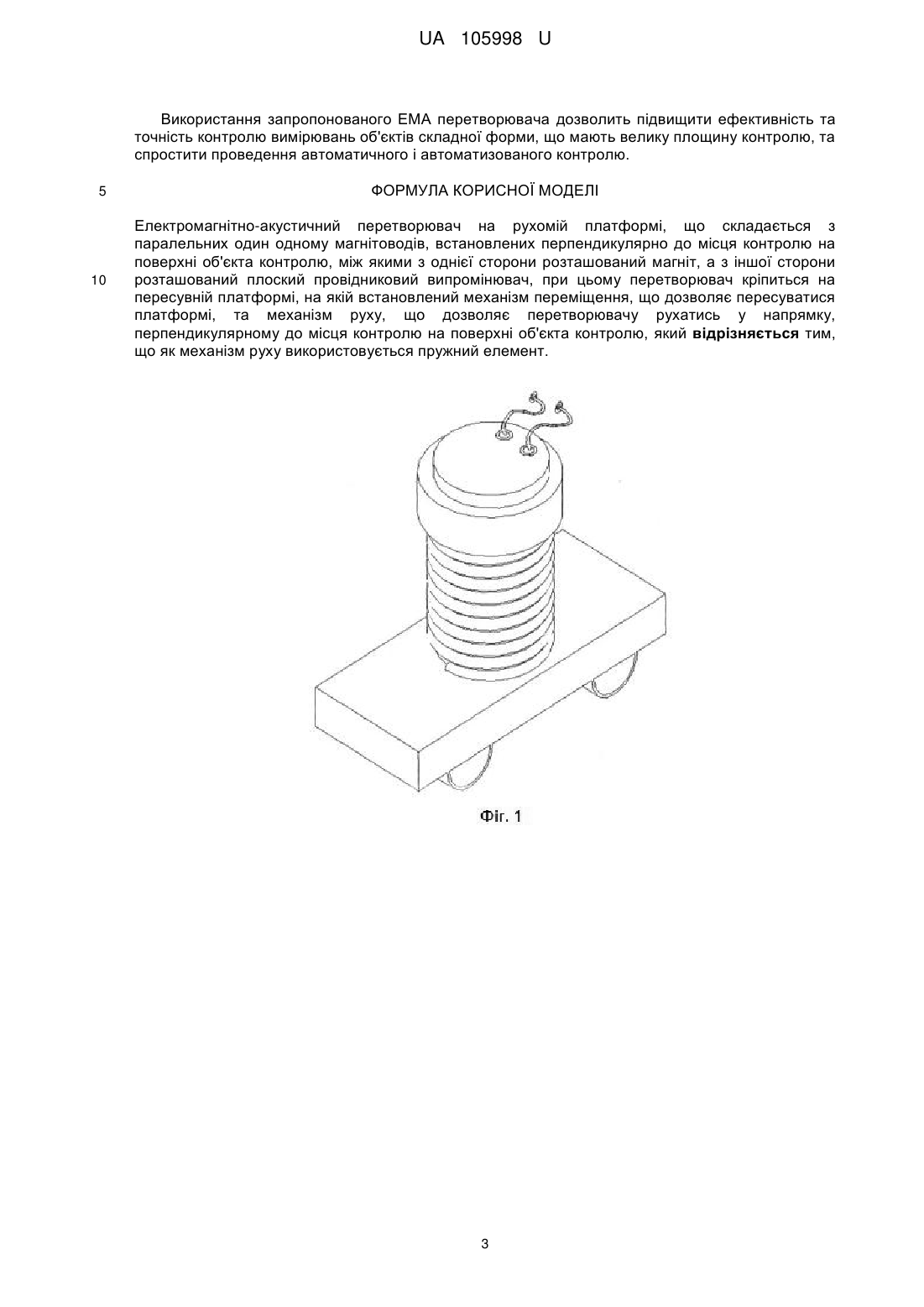
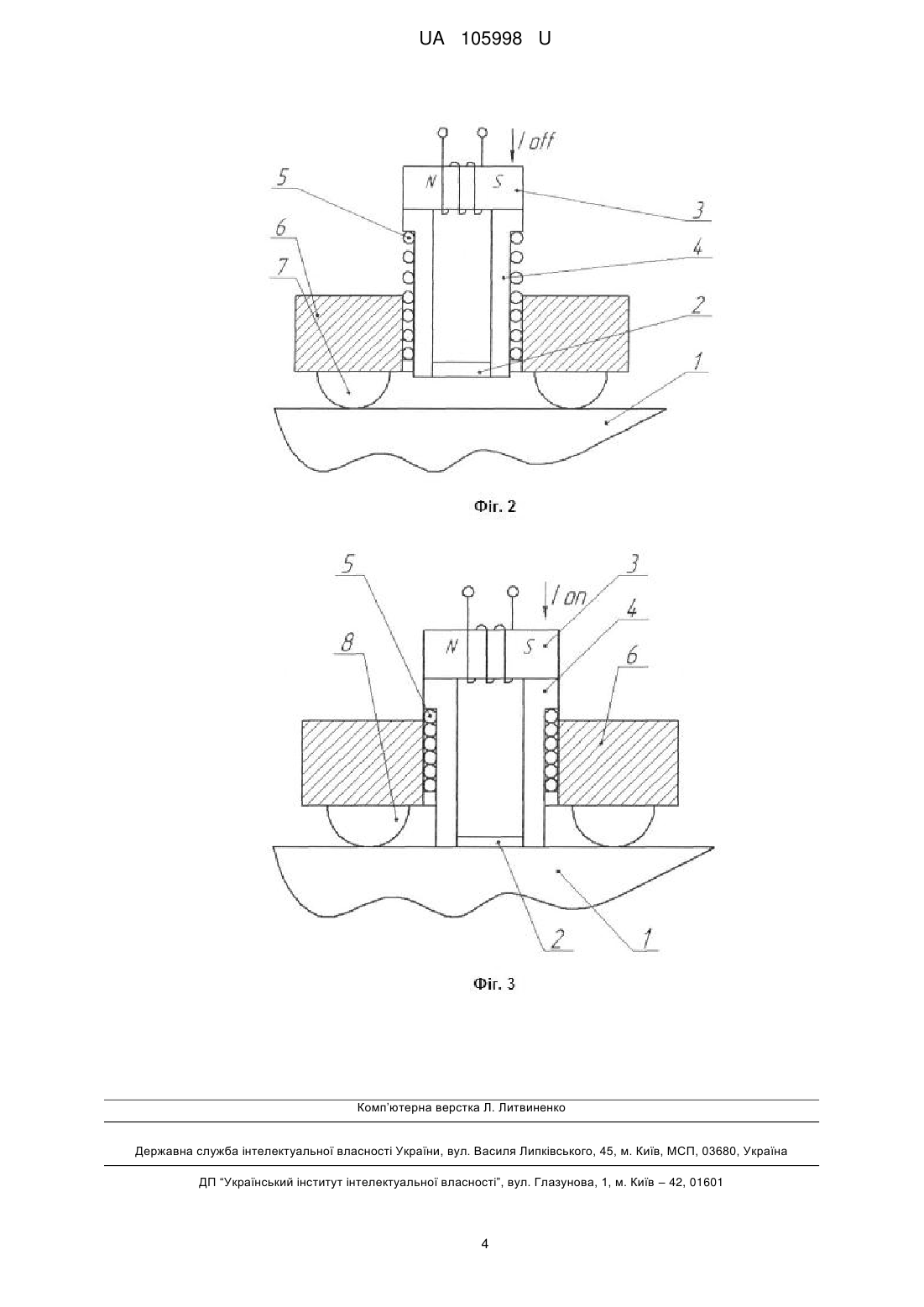
Реферат: Електромагнітно-акустичний перетворювач на рухомій платформі, що складається з паралельних один одному магнітоводів, встановлених перпендикулярно до місця контролю на поверхні об'єкта контролю, між якими з однієї сторони розташований магніт, а з іншої сторони розташований плоский провідниковий випромінювач, при цьому перетворювач кріпиться на пересувній платформі, на якій встановлений механізм переміщення, що дозволяє пересуватися платформі, та механізм руху, що дозволяє перетворювачу рухатись у напрямку, перпендикулярному до місця контролю на поверхні об'єкта контролю, причому як механізм руху використовується пружний елемент. UA 105998 U (54) ЕЛЕКТРОМАГНІТНО-АКУСТИЧНИЙ ПЕРЕТВОРЮВАЧ НА РУХОМІЙ ПЛАТФОРМІ UA 105998 U UA 105998 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до техніки неруйнівного контролю металевих виробів ультразвуковим методом. При проведенні неруйнівного контролю металевих виробів ультразвуковим методом широко застосовуються електромагнітно-акустичні перетворювачі (ЕМА перетворювачі), за допомогою яких можливо сформувати акустичну хвилю в металі контрольованого об'єкта без використання контактної рідини, через іржу або лакофарбове покриття. Принцип дії ЕМА перетворювача оснований на формуванні акустичної хвилі в результаті взаємодії первинного та наведеного струмів у поверхневому шарі металу об'єкта контролю, ЕМА перетворювач складається з вузла підмагнічування та плоского провідникового випромінювача, Вузол підмагнічування - це електромагніт або постійний магніт. Плоский провідниковий випромінювач складається з котушки або набору елементарних провідників, які розташовані поряд з поверхнею об'єкта контролю або виробу. Відомий ЕМА перетворювач (Шкарлет Ю. М. Бесконтактные методы ультразвукового контроля. - М.: Машиностроение, 1974. - С. 56), який призначений для ультразвукового контролю листового матеріалу, ЕМА перетворювач складається з вузла підмагнічування і плоского провідникового випромінювача. В свою чергу, вузол підмагнічування складається з потужних концентраторів магнітного поля, які розташовані з двох сторін контрольованого листа металу. Випромінювач складається з потужних концентраторів магнітного поля, які розташовані з двох сторін контрольованого листа металу. Випромінювач складається зі спіральної котушки, яка розташована між контрольованою поверхнею і торцевою поверхнею одного із концентраторів магнітного поля. Схема побудови ЕМА перетворювача не забезпечую проведення швидкісного контролю великих площин поверхонь металевих об'єктів. Відомий ЕМА перетворювач (патент України на корисну модель № 17947, G01 N29/04), що складається з П-подібного вузла підмагнічування та випромінювача. Центральна частина вузла підмагнічування є постійним магнітом, який має можливість здійснювати плоско-паралельний рух щодо об'єкта контролю, за рахунок чого досягається поступова зміна магнітної індукції в об'єкті контролю. Недоліком перетворювача є зниження швидкості при контролі великих об'єктів складної форми. Відомий ЕМА перетворювач (патент України на винахід № 82723, G01 N29/04), який складається з вузла підмагнічування у вигляді декількох паралельних магнітоводів, між якими з однієї сторони встановлений постійний магніт, а з іншої сторони - плоский провідниковий випромінювач, Зміна індукції в об'єкті контролю досягається за рахунок обертання постійного магніту навколо точки своєї симетрії. Конструкція ЕМА перетворювача не гарантує щільного прилягання торців магнітоводів до поверхні об'єкта контролю. Відомий ЕМА перетворювач (див. патент Японии 2004-177267, G01 N29/04). ЕМА перетворювач складається з П-подібного вузла підмагнічування і плоского дротового випромінювача. Плоский провідниковий випромінювач являє собою решітку, яка складається з декількох паралельних один одному провідників, що розташовані в одній площині. Решітка розташована між полюсами вузла підмагнічування, паралельно поверхні контрольованого виробу. Вузол підмагнічування містить у собі два паралельних магнітоводи і постійний магніт, який розташований між магнітоводами з однієї сторони. Друга сторона магнітоводів є полюсами вузла підмагнічування. Постійний магніт являє собою прямокутний брусок, який встановлений з можливістю обертання або плоско-паралельного руху вздовж магнітів, за рахунок чого регулюється магнітна індукція в об'єкті. Як і в усіх аналогах, конструкція ЕМА перетворювача не забезпечує щільного прилягання торцевих поверхонь магнітоводів до поверхніоб'єкта контролю, що може призвести до зниження якості вимірів через відмінності характеристик реально формованого в об'єкті контролю магнітного поля від заданих значень. Також конструкція найбільш близького аналога ускладнює проведення автоматичного і автоматизованого контролю та не гарантує якісних результатів вимірів при проведенні швидкісного контролю великих площин об'єкта контролю. Відомий ЕМА перетворювач (див. Пат. на корисну модель 98915 Україна, G01 N29/04, Електромагнітно-акустичний перетворювач для контролю об'єктів великих розмірів; публ. 2015), який є найбільш близьким аналогом розробленої корисної моделі, ЕМА перетворювач складається з вузла підмагнічування і плоского провідникового випромінювача. Плоский провідниковий випромінювач являє собою решітку, яка складається з декількох розташованих в одній площині паралельних один одному провідників або плоску котушку. Вузол підмагнічування складається з двох паралельно встановлених магнітоводів, між якими з однієї сторони розташований магніт, а з іншої сторони між магнітоводами розташований плоский провідниковий випромінювач, головна площина якого перпендикулярна головним осям магнітоводів, Для контролю об'єктів, що мають поверхні великих площин, перетворювач 1 UA 105998 U 5 10 15 20 25 30 35 40 45 50 55 кріпиться на пересувній платформі, на якій встановлений механізм переміщення, що дозволяє пересуватися платформі, та механізм руху, що дозволяє перетворювачу рухатись у напрямку, перпендикулярному до місця контролю на поверхні об'єкта контролю У основу корисної моделі поставлена задача підвищення якості та швидкості ультразвукових вимірів при проведенні контролю великих розмірів площини об'єкта контролю. Задача, яка поставлена в основу корисної моделі, вирішується за рахунок того, що електромагнітно-акустичний перетворювач на рухомій платформі, що складається з паралельних один одному магнітоводів, встановлених перпендикулярно до місця контролю на поверхні об'єкта контролю, між якими з однієї сторони розташований магніт, а з іншої сторони розташований плоский провідниковий випромінювач, при цьому перетворювач кріпиться на пересувній платформі, на якій встановлений механізм переміщення, що дозволяє пересуватися платформі, та механізм руху, що дозволяє перетворювачу рухатись у напрямку, перпендикулярному до місця контролю на поверхні об'єкта контролю, у відповідності до корисної моделі, як механізм руху використовується пружний елемент. Суть корисної моделі полягає в наступному. ЕМА перетворювач складається з вузла підмагнічування і плоского провідникового випромінювача. Плоский провідниковий випромінювач являє собою решітку, яка складається з декількох розташованих в одній площині паралельних один одному провідників або плоску котушку. Вузол підмагнічування складається з двох паралельно встановлених магнітоводів, між якими з однієї сторони розташований електромагніт, а з іншої сторони між магнітоводами розташований плоский провідниковий випромінювач, головна площина якого перпендикулярна головним осям магнітоводів. Для контролю об'єктів, що мають поверхні великих площин, перетворювач кріпиться на пересувній платформі на якій встановлений механізм переміщення, що дозволяє пересуватися платформі, та пружний елемент, що дозволяє перетворювачу рухатись у напрямку, перпендикулярному до місця контролю на поверхні об'єкта контролю. ЕМА перетворювач працює наступним чином. Для проведення неруйнівного контролю пересувна платформа з ЕМА перетворювачем встановлюється на поверхню об'єкта контролю. Далі за рахунок механізму переміщення платформи, платформа пересувається до місця контролю, разом з цим на електромагніт подається струм, в результаті чого пружний елемент перетворювача стискається, тим самими переміщує перетворювач на плоску ділянку поверхні об'єкта контролю, мінімізуючи зазори, на яких відбувається розсіювання магнітного поля. Після цього на плоский провідниковий випромінювач подають електричний сигнал, в результаті чого в поверхневому шарі об'єкта контролю індукуються вихрові струми. Взаємодія первинного і наведеного струмів призводить до появи тиску, який змінюється з ультразвуковою частотою. Ультразвукові коливання утворюють в металі просторово-періодичне поле, під впливом якого частки середовища здійснюють коливання. При перетині коливними частками силових ліній магнітного поля, в поверхневому шарі металу виникають вихрові струми, які вимірюються за допомогою приймальної частини системи неруйнівного контролю. За рахунок більшої щільності прилягання перетворювач до поверхні об'єкта, який підлягає контролю, просторовий розподіл вектора магнітної індукції у зоні формування ультразвукової хвилі буде більш прогнозовано як по величині, так і по напрямку, що, в свою чергу, призведе до підвищення якості і постійності результатів ультразвукових вимірювань. Після завершення вимірювань подача струму на електромагніт припиняється, а пружний елемент розтискається, в результаті чого перетворювач переміщується до платформи переміщує перетворювач до платформи, а платформа у разі необхідності продовжує пересуватися по поверхні об'єкта контролю до наступного місця, що підлягає контролю. Можливість руху платформи, вздовж поверхні об'єкта контролю, та наявність пружного елемента перетворювача, у напрямі, перпендикулярному поверхні об'єкта контролю, дає можливість збільшення швидкості контролю. Конструкція запропонованого ЕМА перетворювача пояснюється рисунками, які наведені на фіг. 1-3. Де 1 - об'єкт контролю, 2 - плоский провідниковий випромінювач, 3 - електромагніт, 4 магнітоводи, 5 - пружний елемент перетворювача, 6 - платформа, 7- перетворювач, 8 механізм переміщення платформи, І on - струм подається, І off - струм не подається. Рисунок, який представлений на фіг. 1, ілюструє загальну конструкцію запропонованого ЕМА перетворювача, встановленого на рухомій платформі. Рисунок на фіг. 2 та фіг. 3 пояснює роботу механізмів ЕМА перетворювача під час проведення контролю об'єкта контролю. Як показано на рисунках фіг. 2 та фіг. 3 перетворювач може рухатися у напрямі, перпендикулярному поверхні об'єкта контролю, а рисунок на фіг. 2 показує ще можливість платформи пересуватися вздовж поверхні об'єкта контролю. Рисунок на фіг. 3 показує положення перетворювача під час вимірювань. 2 UA 105998 U Використання запропонованого ЕМА перетворювача дозволить підвищити ефективність та точність контролю вимірювань об'єктів складної форми, що мають велику площину контролю, та спростити проведення автоматичного і автоматизованого контролю. 5 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Електромагнітно-акустичний перетворювач на рухомій платформі, що складається з паралельних один одному магнітоводів, встановлених перпендикулярно до місця контролю на поверхні об'єкта контролю, між якими з однієї сторони розташований магніт, а з іншої сторони розташований плоский провідниковий випромінювач, при цьому перетворювач кріпиться на пересувній платформі, на якій встановлений механізм переміщення, що дозволяє пересуватися платформі, та механізм руху, що дозволяє перетворювачу рухатись у напрямку, перпендикулярному до місця контролю на поверхні об'єкта контролю, який відрізняється тим, що як механізм руху використовується пружний елемент. 3 UA 105998 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromagnetic-acoustic transducer on a movable platform
Автори англійськоюPodolian Oleksandr Oleksandrovych, Arkhypenko Bohdan Oleksandrovych
Назва патенту російськоюЭлектромагнитно-акустический преобразователь на подвижной платформе
Автори російськоюПодолян Александр Александрович, Архипенко Богдан Александрович
МПК / Мітки
МПК: G01N 29/04
Мітки: платформи, електромагнітно-акустичний, рухомий, перетворювач
Код посилання
<a href="https://ua.patents.su/6-105998-elektromagnitno-akustichnijj-peretvoryuvach-na-rukhomijj-platformi.html" target="_blank" rel="follow" title="База патентів України">Електромагнітно-акустичний перетворювач на рухомій платформі</a>
Електромагнітно-акустичний перетворювач для контролю об’єктів великих розмірів
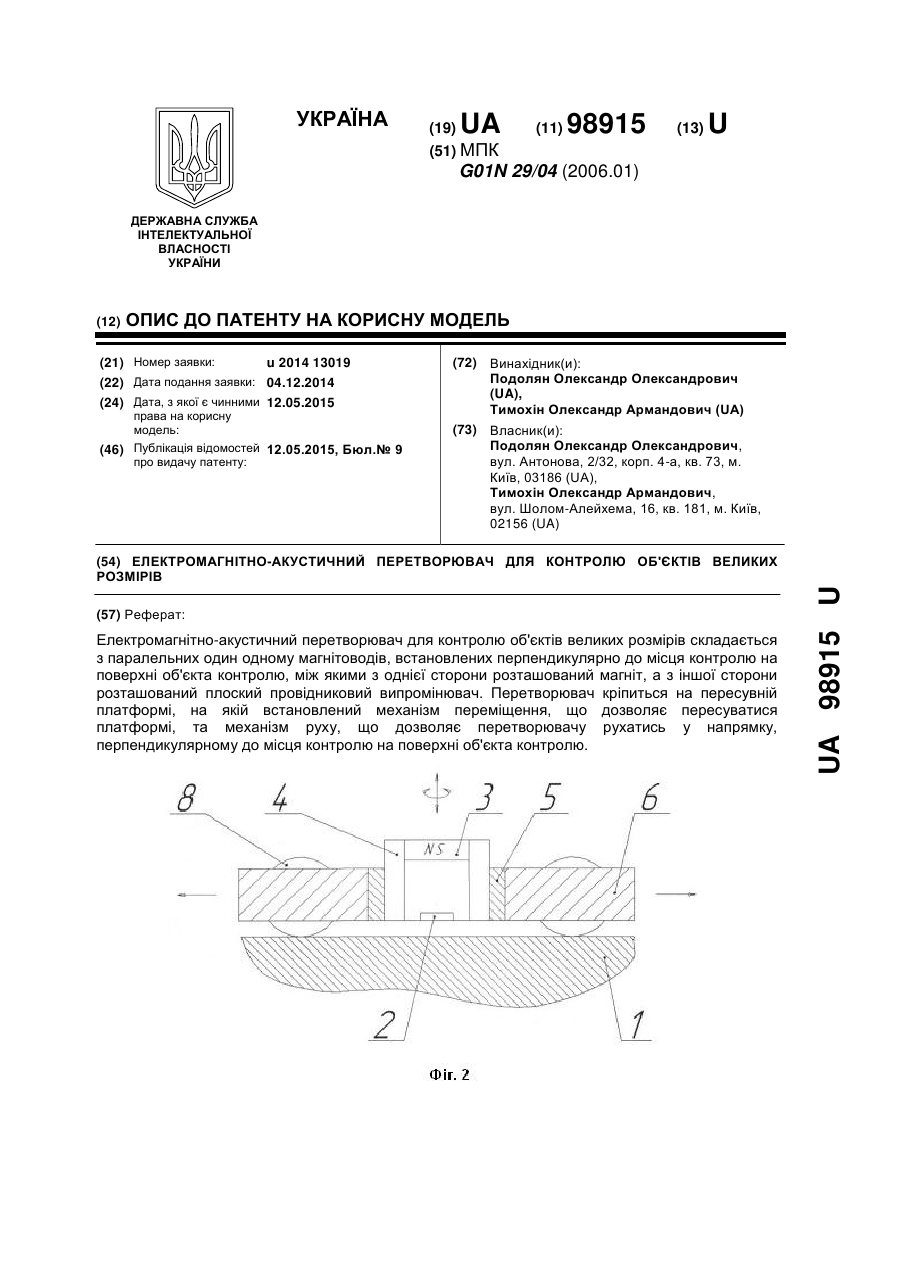
Номер патенту: 98915
Опубліковано: 12.05.2015
Автори: Подолян Олександр Олександрович, Тимохін Олександр Армандович
МПК: G01N 29/04
Мітки: контролю, об'єктів, перетворювач, розмірів, великих, електромагнітно-акустичний
Формула / Реферат:
Електромагнітно-акустичний перетворювач для контролю об'єктів великих розмірів, що складається з паралельних один одному магнітоводів, встановлених перпендикулярно до місця контролю на поверхні об'єкта контролю, між якими з однієї сторони розташований магніт, а з іншої сторони розташований плоский провідниковий випромінювач, який відрізняється тим, що перетворювач кріпиться на пересувній платформі, на якій встановлений механізм переміщення,...
Електромагнітно-акустичний перетворювач для контролю об’єктів складної форми
Номер патенту: 98026
Опубліковано: 10.04.2015
Автори: Андрієнко Олексій Ігорович, Тесленко Володимир Юрійович, Подолян Олександр Олександрович
МПК: G01N 29/04
Мітки: електромагнітно-акустичний, об'єктів, контролю, перетворювач, складної, форми
Формула / Реферат:
1. Електромагнітно-акустичний перетворювач для контролю об'єктів складної форми, який складається з двох паралельно встановлених магнітоводів, що встановлюються на поверхню об'єкта контролю, між якими з однієї сторони розташований магніт, а з іншої сторони розташований плоский провідниковий випромінювач, головна площина якого перпендикулярна головним осям магнітоводів, який відрізняється тим, що торці магнітоводів зі сторони об'єкта контролю...
Електромагнітно-акустичний перетворювач
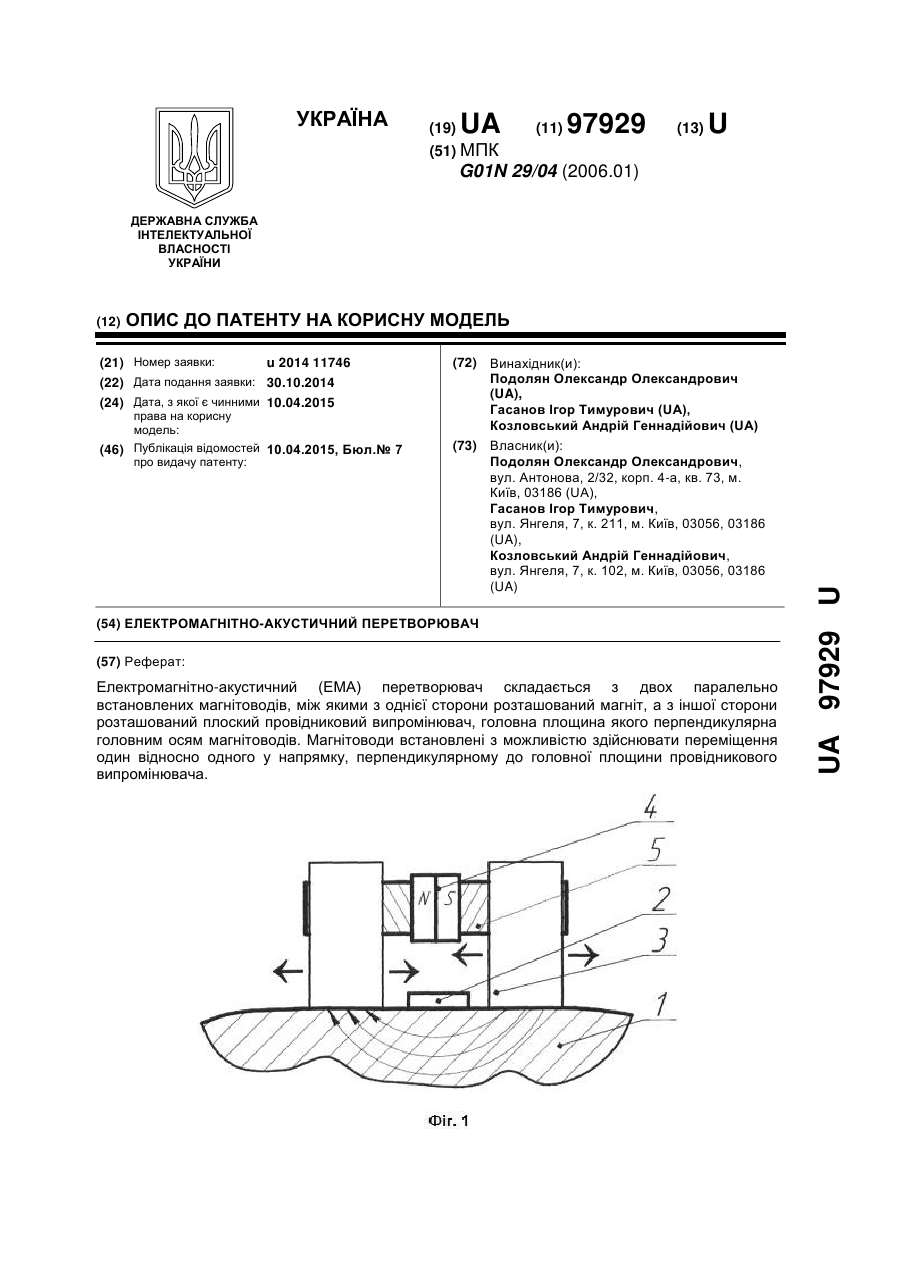
Номер патенту: 97929
Опубліковано: 10.04.2015
Автори: Козловський Андрій Геннадійович, Подолян Олександр Олександрович, Гасанов Ігор Тимурович
МПК: G01N 29/04
Мітки: електромагнітно-акустичний, перетворювач
Формула / Реферат:
Електромагнітно-акустичний (ЕМА) перетворювач, який складається з двох паралельно встановлених магнітоводів, між якими з однієї сторони розташований магніт, а з іншої сторони розташований плоский провідниковий випромінювач, головна площина якого перпендикулярна головним осям магнітоводів, який відрізняється тим, що магнітоводи встановлені з можливістю здійснювати переміщення один відносно одного у напрямку, перпендикулярному до головної...
Електромагнітно-акустичний перетворювач
Номер патенту: 97928
Опубліковано: 10.04.2015
Автори: Гасанов Ігор Тимурович, Козловський Андрій Геннадійович, Подолян Олександр Олександрович
МПК: G01N 29/04
Мітки: електромагнітно-акустичний, перетворювач
Формула / Реферат:
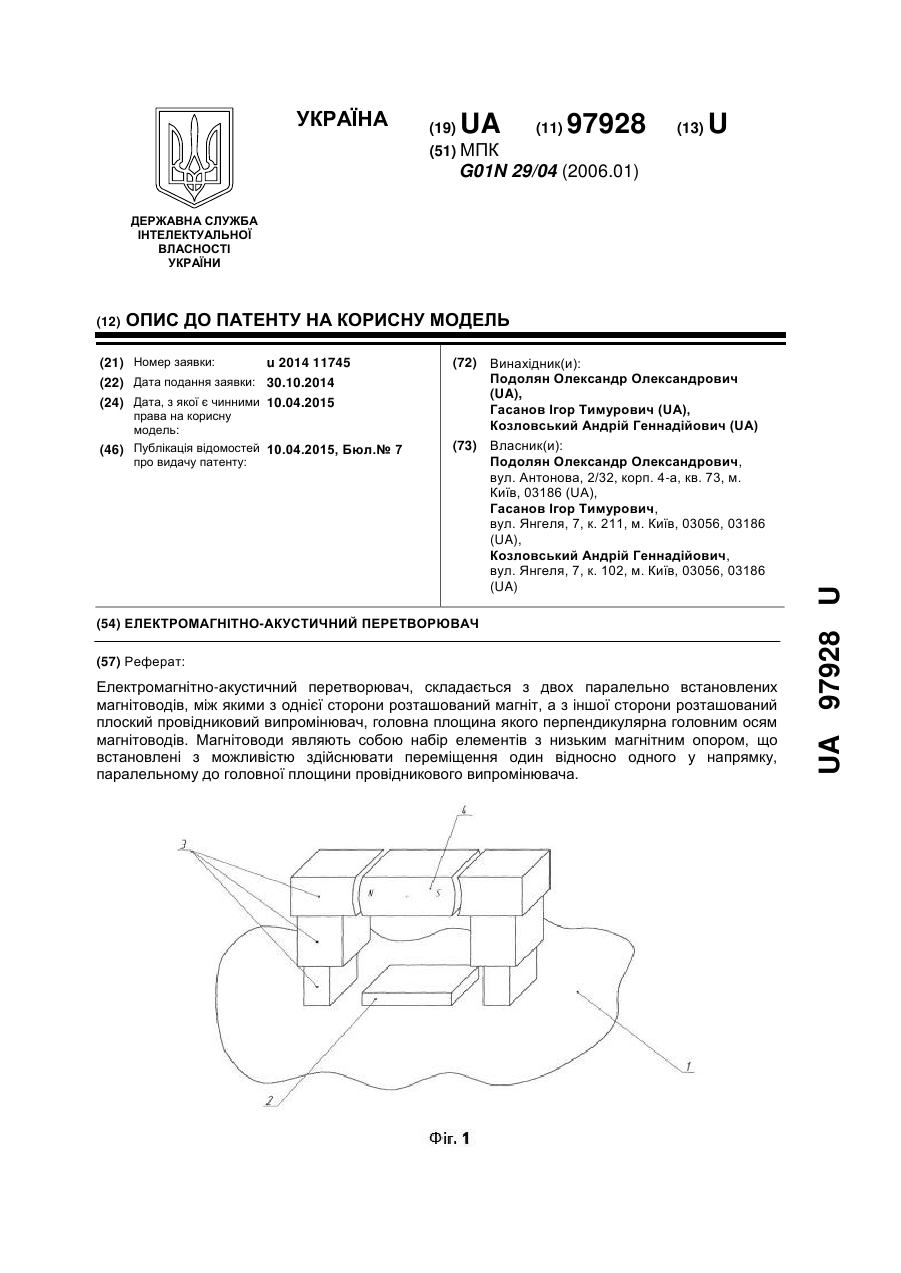
Електромагнітно-акустичний перетворювач, що складається з двох паралельно встановлених магнітоводів, між якими з однієї сторони розташований магніт, а з іншої сторони розташований плоский провідниковий випромінювач, головна площина якого перпендикулярна головним осям магнітоводів, який відрізняється тим, що магнітоводи являють собою набір елементів з низьким магнітним опором, що встановлені з можливістю здійснювати переміщення один відносно...
Електромагнітно-акустичний перетворювач для контролю сферичних об’єктів
Номер патенту: 98025
Опубліковано: 10.04.2015
Автори: Тесленко Володимир Юрійович, Подолян Олександр Олександрович, Андрієнко Олексій Ігорович
МПК: G01N 29/04
Мітки: електромагнітно-акустичний, перетворювач, контролю, об'єктів, сферичних
Формула / Реферат:
Електромагнітно-акустичний перетворювач для контролю сферичних об'єктів, що складається з чотирьох паралельних один одному магнітоводів, встановлених навколо спільної осі симетрії, між якими з одного боку розміщений плоский випромінювач, перпендикулярний до загальної осі симетрії, а з іншого боку постійний магніт, встановлений з можливістю повороту навколо точки своєї симетрії, розташованої на загальній осі симетрії, який відрізняється тим,...
Попередній патент: Односторонній замковий циліндр феодосьєвих підвищеної секретності з відповідним поворотним ключем
Наступний патент: Золь-гель спосіб одержання сферично гранульованого високопоруватого цирконійсилікату
Випадковий патент: Маммут-фільтр