Фазовий спосіб вимірювання відстані до нерухомого предмета і пристрій для його здійснення
Номер патенту: 21472
Опубліковано: 16.12.1997
Автори: Ментковський Юзеф Леонович, Головко Дмитро Богданович, Кондратов Владислав Тимофійович, Дубровний Віктор Опанасович, Скрипник Юрій Олексійович
Формула / Реферат
1. Фазовий спосіб вимірювання відстані до нерухомого предмета, який полягає у створенні зондуючого променя з двох оптичних когерентних випромінювань, близьких за частотою, опроміненні контрольованого предмета зондуючим променем, прийомі відбитого променя, його фотоелектричному перетворенні, виділенні електричного сигналу різницевої частоти, вимірюванні різниці фаз електричних сигналів і визначенні відстані за аналітичним співвідношенням, який відрізняється тим, що початкове оптичне когерентне випромінювання модулюють за фазою акустичними коливаннями, суміщують випромінювання нульового і першого порядку дифракційного спектру в один зондуючий промінь, переміщують площину розповсюдження акустичних коливань в напрямі їх розповсюдження до компенсації початкової різниці фаз сигналів, що фіксується одержанням нульової різниці фаз, змінюють напрям розповсюдження акустичних коливань на протилежний поворотом площини розповсюдження на 180°, додатково переміщують площину вздовж напряму розловсюження акустичних коливань до компенсації різниці фаз, що з'явилася, до відновлення нульової різниці фаз, вимірюють додаткові компенсуючі переміщення Δ11 і Δ12, а відстань lx визначають за виразом
![]()
де Δ11 -додаткове компенсуюче переміщення площини розповсюдження акустичних коливань при зондуванні променем вимірюваної відстані Lx;
Lo - фіксована відстань до нерухомого дзеркала;
Δ11 -додаткове компенсуюче переміщення площини розповсюдження акустичних коливань при зондуванні променем фіксованої відстані Lo.
2. Пристрій для вимірювання відстані до нерухомого предмету, який складається з лазера, акустооптичного модулятора, коліматора, фотоелектричного перетворювача, напівпрозорого дзеркала, яке оптично пов'язане по одній осі через коліматор з акустооптичним модулятором, опромінюваним предметом, а по другій осі через поляризатор і об'єктив з фотоелектричним перетворювачем, генератора електричних коливань і послідовно з'єднаних вузькосмугового фільтра, підсилювача електричних коливань і фазового детектора, при цьому вихід генератора електричних коливань з'єднаний з електричним входом акустооптичного модулятора і через квадратурний фазообертач з опорним входом фазового детектора, який відрізняється тим, що введені: пристрій зведення променів, який входами оптичне пов'язаний з виходами акустооптичного модулятора, виходом - із входом коліматора, друге напівпрозоре дзеркало, що розмішене на фіксованій відстані від першого на шляху розповсюдження зондуючого променя, другі поляризатор, об'єктив і фотоелектричний перетворювач, оптично пов'язані по другій осі з другим напівпрозорим дзеркалом, автоматичний перемикач, входи якого з'єднані з виходами фотоелектричних перетворювачів, вихід з'єднаний із входом вузькосмугового фільтра, аналогоцифровий перетворювач, мікро ЕОМ, цифровий індикатор, чотириканальний цифроаналоговий перетворювач і механічно пов'язані з акустооптичним модулятором пристрій лінійного переміщення і пристрій кутового переміщення, при цьому вхід аналого-цифрового перетворювача з'єднаний з виходом фазового детектора, його вихід з'єднаний із входом мікро ЕОМ, до першого вихому мікро ЕОМ під'єднаний цифровий індикатор, до другого вихому - керуючий вхід автоматичного перемикача і до третього - вхід чотириканального цифроаналогового перетворювача, перший вихід якого під'єднаний до керуючого пристрою лінійних переміщень акустооптичного модулятора, другий -до керуючого входу лазера, третій - до керуючого входу пристрою кутових переміщень акустооптичного модулятора і четвертий - до керуючого входу генератора електричних коливань.
Текст
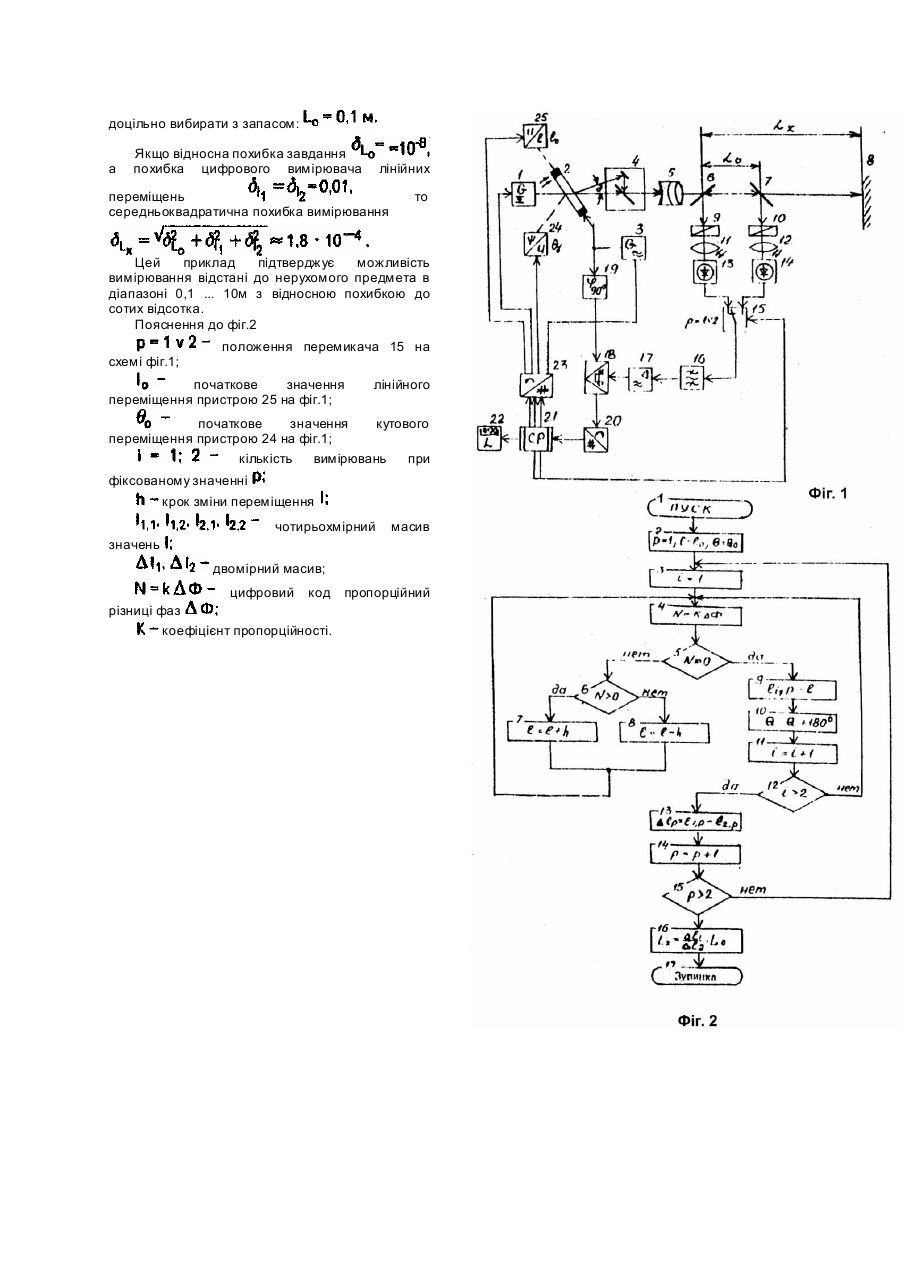
Винахід відноситься до області вимірювання відстані з допомогою оптичного випромінювання і може бути використаний для визначення відстані до нерухомого предмета в системах технічного зору. Для вимірювання відстані до нерухомого предмета широко використовують фазовий спосіб визначення шляху проходження оптичного випромінювання (Камен X. Электронные способы измерений в геодезии: Пер. с нем. - М.: Недра, 1982. - С.140 - 147), у якому як зондуючий промінь використовують модульоване гармонічним коливанням лазерне випромінювання, що направлене на контрольований предмет, а час подвійного проходження цим променем вимірюваної відстані визначають за фазовим зсувом обвідної модуляції цього променя відносно модулюючого сигналу. За цим способом вимірювану відстань визначають в долях довжини хвилі обвідної модуляції зондуючого променя. Проте, неминуча неоднорідність фази модуляції за перерізом зондуючого променя, реальні відхилення закону модуляції лазерного променя від гармонічного, а також фазові спотворення, що виникають в процесах модуляції і демодуляції, не дозволяють одержати високу точність вимірювання. Відомий також фазовий спосіб визначення відстані до нерухомого предмета (Большаков В.Д. и др. Радиогеодезические и электроннооптические измерения. - М.: Недра, 1985. - С.156 - 158), який оснований на створенні зондуючого променя з двох оптичних когерентних випромінювань близьких за частотою, опроміненні контрольованого предмета зондуючим променем, прийомі відбитого променя, його фотоелектричному перетворенні, виділенні електричного сигналу різницевої частоти, вимірюванні фазового зсуву електричного сигналу і визначення відстані за аналітичним співвідношенням. визначають за виразом де вакуумі; Відстань швидкість розповсюдження світла у різниця випромінювань; частот двох оптичних середнє інтегральне значення групового показника переломлення повітря; вимірюваний фазовий зсув. З відомого співвідношення видно, що вимірювану відстань одержують у долях довжини хвилі сумарної інтерференційної картини, яка створюється при суперпозиції оптичних когерентних коливань, що одночасно випромінюються на двох близьких частота х. Нестабільність різницевої частоти і непостійність групового показника переломлення повітря впливають на результат вимірювання. На близьких частотах дво х оптичних випромінювань найменші зміни в частоті оптичних коливань викликають великі зміни їх різницевої частоти. Тому що максимальний фазовий зсув не перевищує за сигналом різницевої частоти, то фазові спотворення при фотоелектричному перетворенні і виділенні електричного сигналу різницевої частоти сумірні з корисним фазовим зсувом Тому сумарна похибка вимірювання відстані виходить значною. Теоретично високу точність вимірювання відстані до нерухомого предмета забезпечує компенсаційний фазовимірювальний пристрій (Методы и средства лазерной прецизионной дальнометрии / Андрусенко А.М. и др. - М.: Изд. стандартов, 1987. - С.34 - 37), який складається з двочастотного лазера, напівпрозорого дзеркала, на одній оптичній осі якого розміщені оптичний атенюатор і оптична лінія затримки змінної довжини, по другій осі - оптичний віддзеркалювач і суміщуюче дзеркало, фотоелектричний перетворювач, який оптично прив'язаний до виходу оптичної лінії затримки і суміщуючого дзеркала і індикатор електричної напруги, який під'єднаний до виходу фотоелектричного перетворювача. Регулювання довжини оптичної лінії затримки здійснюється, доки не буде одержаний мінімальний показ індикатора. Проте відсутність чіткого нуля при компенсації вимірюваного фазового зсуву і знанні похибки оптичної лінії затримки із змінною довжиною практично не забезпечують високу точність вимірювання відстані. Відомий також пристрій для вимірювання відстані до нерухомого предмету (Застрогин Ю.Ф. Прецизионные измерения параметров движения с использованием лазера. - М.: Машиностроение, 1986. - С.132 - 135), який складається з лазера, акустооптичного модулятора, коліматора, фотоелектричного перетворювача, напівпрозорого дзеркала, яке оптично пов'язане по одній осі через коліматор з акустооптичним модулятором, опромінюваним предметом і по другій осі через поляризатор і об'єктив з фотоелектричним перетворювачем, генератора електричних коливань і послідовно з'єднаних вузькосмугового фільтра, підсилювача електричних коливань і фазового детектора, при цьому вихід генератора електричних коливань з'єднаний з електричним входом акустооптичного модулятора і через квадратурний фазообертач з опорним входом фазового детектора. Пристрій має також систему нерухомих дзеркал і світлоподілюючих пластин. Вхід вузькосмугового фільтра з'єднаний з виходом фотоелектричного перетворювача, світлоподілюючі пластини по другій осі оптично зв'язані через контрольований предмет з нерухомими дзеркалами, а відлік вимірюваної величини проводять по вольтметру або частотоміру, які під'єднані до виходу вузькосмугового фільтра. Стале положення акустооптичного модулятора у просторі не дозволяє виключити похибки від фазових спотворень в самому акустооптичному модуляторі, фотоелектричному перетворювачі і вузькосмугастому фільтрі через його неминуче розлагодження відносно різницевої частоти. Система дзеркал не компенсує похибку від змін групового показника переломлення повітря через коливання температури, тиску і вологості в зоні огляду те хнічного зору. В основу винаходу покладена задача створити такий фазовий спосіб і пристрій вимірювання відстані до нерухомого предмета, в яких введення нових операцій визначення відстані до нерухомого предмета в способі, введення нових елементів і блоків в пристрої дозволило б забезпечити виключення похибок від фазових спотворень зондуючого променя і від непостійності групового показника переломлення повітря в зоні технічного зору. Поставлена задача вирішується тим, що у фазовий спосіб вимірювання відстані до нерухомого предмета, який оснований на створенні зондуючого променя з двох оптичних когерентних випромінювань близьких за частотою, опроміненні контрольованого предмета зондуючим променем, прийомі відбитого променя, його фотоелектричному перетворенні, виділенні електричного сигналу різницевої частоти, вимірюванні фазового зсуву електричного сигналу і визначенні відстані за аналітичним співвідношенням, згідно з винаходом, початкове оптичне когерентне випромінювання модулюють за фазою акустичними коливаннями, суміщують випромінювання нульового і першого порядку дифракційного спектра в один промінь, переміщують площину розповсюдження акустичних коливань вздовж напряму їх розповсюдження до одержання нульового зсуву фаз, змінюють напрям розповсюдження акустичних коливань на протилежний поворотом площини розповсюдження на 180°, додатково переміщують площину вздовж напряму розповсюдження акустичних коливань до відновлення нульового зсуву фаз, вимірюють додаткове компенсуюче переміщення, а відстань визначають за виразом де додаткове компенсуюче переміщення при зондуванні променем відстані фіксована відстань; додаткове компенсуюче переміщення при зондуванні променем відстані Поставлена задача вирішується також тим, що в пристрій для вимірювання відстані до нерухомого предмету, який складається з лазера, акустооптичного модулятора, коліматора, фотоелектричного перетворювача, напівпрозорого дзеркала, яке оптично пов'язане по одній осі через коліматор з акустооптичним модулятором, опромінюваним предметом, а по другій осі через поляризатор і об'єктив з фотоелектричним перетворювачем, генератора електричних коливань і послідовно з'єднаних вузькосмугового фільтра, підсилювача електричних коливань і фазового детектора, при цьому вихід генератора електричних коливань з'єднаний з електричним входом акустооптичного модулятора і через квадратурний фазообертач з опорним входом фазового детектора, згідно з винаходом, введені пристрій зведення променів, який входами оптично пов'язаний з виходами акустооптичного модулятора, виходом - із входом коліматора, друге напівпрозоре дзеркало, що розміщене на фіксованій відстані від першого на шляху розповсюдження зондуючого променя, другі поляризатор, об'єктив і фотоелектричний перетворювач, оптично пов'язані по другій осі з другим напівпрозорим дзеркалом, автоматичний перемикач, входи якого з'єднані з виходами фотоелектричних перетворювачів, ви хід з'єднаний із входом вузькосмугового фільтра, аналого-цифровий перетворювач, мікроЕОМ, цифровий індикатор, чотириканальний цифроаналоговий перетворювач і механічно пов'язані з акустооптичним модулятором пристрій лінійного переміщення і пристрій кутового переміщення, при цьому вхід аналого-цифрового перетворювача з'єднаний з виходом фазового детектора, його вихід з'єднаний із входом мікроЕОМ, до першого виходу мікроЕОМ під'єднаний цифровий індикатор, до другого виходу - керуючий вхід автоматичного перемикача і до третього вхід чотириканального цифроаналогового перетворювача, виходи якого під'єднані: перший - до керуючого пристрою лінійних переміщень акустооптичного модулятора, другий - до керуючого входу лазера, третій - до керуючого пристрою кутових переміщень акустооптичного модулятора і четвертий - до керуючого входу генератора електричних коливань. Введення операцій лінійних переміщень акустооптичного модулятора наряду з кутовим переміщенням на 180° дозволяє змінювати знак фазового зсуву, пропорційного вимірюваній відстані, без зміни знака фазових спотворень при модуляції і демодуляції зондуючого променя, а також фазових спотворень в процесі фільтрації електричного сигналу. Таким чином, операції, що повторюються при вимірюванні контрольованої і фіксованої відстаней при різних просторових положеннях акустооптичного модулятора, забезпечують виключення похибок від фазових змін обвідної зондуючого променя і від непостійності групового показника переломлення повітря в зоні технічного зору. Включення в склад пристрою вказаних вище блоків, мікроЕОМ з аналого-цифровими і цифроаналоговими пристроями узгодження, а також виконавчих пристроїв кутових і лінійних переміщень акустооптичного модулятора дозволяє повністю автоматизувати обробку результатів додаткових вимірювань і програмними засобами змінювати просторове положення акустооптичного модулятора, що забезпечує високу точність вимірювання відстаней за рахунок виключення похибок від фазових спотворень зондуючого променя і від непостійності групового показника переломлення повітря в зоні технічного зору. На фіг.1 приведена структурна схема пристрою для вимірювання відстані до нерухомого предмета; на фіг.2 - структурна схема алгоритму програми роботи обчислювальної частини пристрою. Пристрій складається з лазера 1, акустооптичного модулятора 2, генератора електричних коливань 3, пристрою зведення променів 4, коліматора 5, напівпрозорих дзеркал 6 і 7, контрольованого предмету 8, поляризаторів 9 і 10, об'єктивів 11 і 12, фотоелектричних перетворювачів 13 і 14, автоматичного перемикача 15, вузькосмугового фільтра 16, підсилювача 17, фазового детектора 18, квадратурного фазообертача 19, аналогоцифрового перетворювача 20, мікроЕОМ 21, цифрового індикатора 22, чотириканального цифроаналогового перетворювача 23, пристроїв кутового 24 і лінійного 25 переміщення. Лазер 1 оптично зв'язаний з акустооптичним модулятором 2, який механічно зв'язаний з пристроєм 24 кутови х переміщень і пристроєм 25 лінійних переміщень. Виходи акустооптичного модулятора оптично зв'язані із входами пристрою 4 зведення променів, вихід якого через коліматор 5 оптично зв'язаний по одній осі з напівпрозорими дзеркалами 6 і 7, які розміщені по лінії візирування контрольованого предмета 8. З напівпрозорими дзеркалами 6 і 7 оптично зв'язані по другій осі через поляризатори 9 і 10, об'єктиви 11 і 12, фотоелектричні перетворювачі 13 і 14. Виходи фотоелектричних перетворювачів 13 і 14 через автоматичний перемикач 15 з'єднані з послідовно ввімкненими вузькосмуговим фільтром 16, підсилювачем 17 електричних коливань і фазовим детектором 18, опорний вхід якого через квадратурний фазообертач 19 з'єднаний з генератором 3. Вихід фазового детектора 18 через аналого-цифровий перетворювач 20 з'єднаний із входом мікроЕОМ 21, до першого виходу мікроЕОМ 21 під'єднаний цифровий індикатор 22, до другого виходу керуючий вхід автоматичного перемикача 15 і до третього - вхід чотириканального цифроаналогового перетворювача 23, виходи якого під'єднані: перший - до керуючого пристрою лінійних переміщень 25 акустооптичного модулятора 2, другий - до керуючого входу лазера 1, третій - до керуючого входу пристрою 24 кутових переміщень акустооптичного модулятора і четвертий - до керуючого входу генератора 3 електричних коливань. Фазовий спосіб визначення віддалі до нерухомого предмета здійснюється так. Оптичні когерентні коливання, які випромінює лазер 1, з частотою піддаються фазовій модуляції акустичними коливаннями, які розповсюджуються в площині акустичного модулятора 2. Акустичні коливання збуджуються модулятора. При цьому фаза модулюючого електричного сигналу переноситься на фазу зміщеного за частотою випромінювання, а на випромінювання нульового порядку фаза модулюючого сигналу не переноситься. Просторово розведені випромінювання нульового і +1 порядків суміщуються в один двочастотний промінь пристроєм зведення 4, цей промінь розширюється коліматором 5 і спрямовується через напівпрозорі дзеркала 6 і 7 на контрольований предмет 8. Відзеркалений від предмета 8 промінь напівпрозорим дзеркалом 6 через поляризатор 9 і об'єктив 11 спрямовується на фотоелектричний перетворювач 13. Оптичні коливання з частотою в процесі розповсюдження одержують фазовий зсув електричним сигналом, що має частоту від генератора 3. Оптичні випромінювання діють на площину акустичного модулятора під кутом Брегга і взаємодіють з акустичними коливаннями, що розповсюджуються в режимі біжучої хвилі. Коли оптичне випромінювання проходить через акустичну хвилю, воно модулюється за фазою, його спектр складається з складових оптичного випромінювання, що розповсюджується в просторі під різними кутами і є порядками дифракційного спектра. Коли акустичний модулятор працює в Брегівському режимі дифракції, прохідне випромінювання розділяється на два дифракційних випромінювання нульового і +1 порядків. В результаті модуляції монохроматичного випромінювання різницею фазових зсувів і Електричний сигнал різницевої частоти виділяється вузькосмуговим фільтром 16, який акустичними де середнє інтегральне значення групового показника переломлення, повітря; коливаннями створюються дві складові випромінювання двома близькими оптичними частотами з і Просторове випромінювання порядку +1 відхиляється від нормалі до площини модулятора на кут де і - довжини хвиль оптичної і акустичної відповідно; - показник переломлення середовища де відстань до контрольованого предмета 8; швидкість світла у вакуумі; показник переломлення повітря на частот Відповідно, оптичні коливання частоти одержують фазовий зсув вихідної де показник переломлення повітря на частоті В результаті суперпозиції близьких за частотою оптичних коливань виникають биття інтенсивності інтерферуючого випромінювання у площині фотоприймача 13 з різницевою частотою Обвідна биття з частотою перетворюється фотоелектричним перетворювачем 13 в електричний сигнал, фаза якого визначається налагоджений на частоту підсилюється підсилювачем 17 і порівнюється за фазою у фазовому детекторі 18 з модулюючим сигналом генератора 3, зміщеним за фазою на 90° фазообертачем 19. Різницю фаз порівнюваних сигналів, враховуючи фазові спотворення, які виникають в процесі модуляції фотоелектричного перетворювача і фільтрації, можна подати у вигляді фазовий зсув, акустичним модулятором 2; який вноситься фазовий зсув, який вноситься фотоелектричним перетворювачем 13; фазовий зсув, який вноситься вузькосмуговим фільтром 16, внаслідок його розлагодження. Після вимірювання різниці фаз (4), переміщують площину розповсюдження акустичних коливань акустооптичного модулятора 2 вздовж напряму їх розповсюдження до одержання нульового зсуву фаз, що фіксується за нульовим значенням сигналу на виході детектора. Лінійні переміщення модулятора вздовж напряму розповсюдження акустичної хвилі з довжиною на величину викликають зміну фази оптичних коливань з частотою +1) відносно коливань з частотою (порядок (нульовий порядок) на залежно від напряму зміщення. Тому лінійно переміщуючи площину акустооптичного модулятора можна компенсувати будь яку початкову різницю фаз (4) де основний компенсуючий зсув фаз. Так, якщо основний компенсуючий зсув фаз внести поперечним відносно до оптичного випромінювання переміщенням модулятора на величину звідкіля де максимальна відстань до контрольованого предмета 8. Потім змінюють фазовий зсув, що вноситься модулятором 2, додатковим лінійним переміщенням площини розповсюдження акустичних хвиль до відновлення нульового фазового зсуву де додатковий компенсуючий фазовий зсув. Згідно з виразом (6) цей зсув можна подати у вигляді то де додаткове компенсуюче переміщення площини розповсюдження акустичних коливань. де хвильове число; лінійне переміщення площини розповсюдження акустичних коливань. Потім змінюють напрям зміщення частоти оптичних коливань при фазовій модуляції і фіксують різницю фаз, що з'явилася. Для цього здійснюють поворот площини розповсюдження акустичних коливань модулятора відносно оптичної осі на 180°, тобто змінюють напрям розповсюдження акустичної хвилі на протилежний. В цьому випадку на виході акустичного модулятора будуть формува тися також два випромінювання, одне з яких буде мати вихідну часто ту оптичного випромінювання (нульовий порядок), а друге - від'ємний частотний Вимірюють це переміщення Прирівнюючи різниці фаз (5) і (11), одержують звідкіля Розв'язуючи відносно вимірюваної частота модуляції. Підставивши значення додаткового відстані (14) отримуємо зсув (порядок -1). Оптичні коливання порядку -1 будуть мати після проходженнявідстані де фазовий зсув компенсуючого фазового зсуву (12) в (15), одержимо де з виразу показник переломлення повітря на частоті Фазовий зсув коливань вихідної частоти при цьому не зміниться Тому фаза обвідної биття змінить свій знак на протилежний. Апаратурні фазові зсуви, які вносяться модулятором фотоелектричним перетворювачем і фільтром остаються без змін. Різниця фаз порівнюваних сигналів (5) стає Для того, щоб не виникла фазова неоднозначність при зміні знаку обвідної від (4) до (8), частоту модуляції вибирають з умови де швидкість розповсюдження акустичних коливань в модуляторі. Потім вимірюють фіксовану відстань до нерухомого дзеркала 7, відбите від якого випромінювання через поляризатор 10 і об'єктив 11 направлене на фотоелектричний перетворювач 14. Перемикач 15 встановлюють в протилежне положення і виділені фільтром 16 електричні коливання частоти підсилюються в підсилювачі 17 і порівнюються за фазою у фазовому детекторі 18 з модулюючим сигналом генератора 3. Фіксовану відстань вибирають з умови виявлення зміни різниці фаз при зміні знаку зміщення частоти на фоні фазових флуктуацій сигналу. Аналогічно з умовою (9) мінімальну фіксовану відстань можна визначити за нерівністю де середньоквадратичне відхилення флюктуації фази порівнюваних сигналів. З виразу (17) випливає Вимірюючи відстань виконують перераховані вище операції, включаючи переміщення площини розповсюдження акустичних коливань в модуляторі 2 на основне і додаткове компенсуюче переміщення, яке вимірюють. Згідно з виразом (16) звідкіля швидкість акустичних коливань Таким чином відстань (16) згідно з виразом (20) має вигляд З виразу (21) випливає, що вимірювана відстань відношенням однозначно компенсуючих визначається переміщень модулятора і фіксованою відстанню При цьому на результат вимірювання не впливає непостійність швидкості розповсюдження акустичних коливань в модуляторі, групового показника модулюючого переломлення повітря, частоти сигналу Виключений також предмет 8. Відбиті від дзеркала 7 і контрольованого предмета 8 випромінювання двочастотного променя через поляризатори 9 і 10 і об'єктиви 11 і 12 попадають на фотоелектричні перетворювачі 13 і 14. В результаті биття нульового і +1 порядку випромінювань у площині фотоелектричних перетворювачів виникають фотостр уми різницевої частоти Електричні коливання з виходу фотоприймачів почергово фільтруються вузькосмуговим фільтром 16, підсилюються підсилювачем 17 і порівнюються за фазою з опорним сигналом частоти у фазовому детекторі.18. Сигнал, пропорційний різниці фаз, перетворюється в аналогоцифровому перетворювачі 20 в цифровий код який вводиться в мікроЕОМ 21. За командою 5 мікроЕОМ 21 на виході чотириканального цифроаналогового перетворювача 23 формується керуючий сигнал, який переміщує пристроєм 25 акустооптичний модулятор 2. Лінійне переміщення модулятора продовжується до тих пір, поки кодовий сигнал на виході аналого-цифрового перетворювача 20 не стане нульовим. За командою 10 мікроЕОМ на виході перетворювача 23 формується керуючий сигнал, який пристроєм 24 повертає модулятор 2 на 180°. Потім за командою 12 мікроЕОМ перетворювач 23 пристроєм 25 знову лінійно переміщує модулятор 2 на величину до відновлення нульового коду на виході перетворювача 20. Результуючий код додаткового переміщення фіксується в пам'яті мікроЕОМ 21 (клітинка 13 алгоритму). За командою 14 мікроЕОМ перемикач 15 переводиться в протилежне положення пристроями 24 і 25 акустооптичний модулятор 2 встановлюється в початкове положення і командами підпрограми 4 ...13 визначається код додаткового переміщення, який відповідає вплив фазових спотворень в модуляторі приймачі випромінювання і електричному вимірюванню фіксованої відстані введена в пам'ять мікроЕОМ. тракті порівняння В результаті забезпечується висока точність вимірювання відстані до нерухомого предмету. Пристрій для вимірювання відстані (фіг.1) до нерухомого предмету працює у програмному режимі згідно з структурною схемою алгоритму, приведеній на фіг.2. За пусковою командою мікроЕОМ 21 вмикається лазер 1 і генератор електричних коливань 3, а акустооптичний модулятор 2 пристроями кутового 24 і лінійного 25 переміщення, а також перемикач 15 установлюються в початкове положення. Випромінювання лазера 1, що має частоту проходячи через модулятор 2, модулюється за фазою з частотою електричного сигналу, що виробляється генератором 3. На виході модулятора, що працює в Брегівському режимі, виникають два випромінювання з різницевою частотою розведені на кут Брегга. Просторово розведені випромінювання нульового і +1 порядку зводяться у пристрої 4 в один двочастотний промінь, який розширюється коліматором 5 і направляється через напівпрозорі дзеркала 6 і 7 на нерухомий контрольований формулою (21) обчислює значення яке виводиться на цифровий індикатор 22 (клітинка 16 алгоритму). що була Остання за При частоті модуляції що відповідає довжинам акустичної хвилі 1 ...0,1мм, реально можна одержати похибку вимірювання лінійних переміщень Тоді компенсуючого зсуву фаз похибка створення що значно менше похибки існуючих електричних фазообертачів. При частоті і швидкості у відповідності до виразу (9) максимальна відстань, яку можна однозначно визначити буде 75м, а мінімальна фіксована відстань при радіан з виразу (18) буде 0,025м. В системах те хнічного зору при вимірюванні відстань до 10м фіксовану відстань доцільно вибирати з запасом: а Якщо відносна похибка завдання похибка цифрового вимірювача лінійних переміщень середньоквадратична похибка вимірювання то Цей приклад підтверджує можливість вимірювання відстані до нерухомого предмета в діапазоні 0,1 ... 10м з відносною похибкою до сотих відсотка. Пояснення до фіг.2 схемі фіг.1; положення перемикача 15 на початкове значення переміщення пристрою 25 на фіг.1; лінійного початкове значення кутового переміщення пристрою 24 на фіг.1; кількість вимірювань при фіксованому значенні крок зміни переміщення чотирьохмірний масив значень двомірний масив; цифровий код пропорційний різниці фаз коефіцієнт пропорційності.
ДивитисяДодаткова інформація
Автори англійськоюHolovko Dmytro Bohdanovych, Skrypnyk Yurii Oleksiiovych, Dubrovnyi Viktor Opanasovych, Mentkovskyi Yuzef Leonovych, Kondratov Vladyslav Tymofiiovych
Автори російськоюГоловко Дмитрий Богданович, Скрипник Юрий Алексеевич, Дубровный Виктор Афанасьевич, Ментковский Юзеф Леонович, Кондратов Владислав Тимофеевич
МПК / Мітки
МПК: G01C 3/08
Мітки: предмета, спосіб, здійснення, пристрій, нерухомого, фазовий, відстані, вимірювання
Код посилання
<a href="https://ua.patents.su/6-21472-fazovijj-sposib-vimiryuvannya-vidstani-do-nerukhomogo-predmeta-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Фазовий спосіб вимірювання відстані до нерухомого предмета і пристрій для його здійснення</a>
Спосіб вимірювання кутової швидкості та пристрій для його здійснення
Номер патенту: 10897
Опубліковано: 25.12.1996
Автори: Ільєнко Анатолій Миколайович, Довгополий Анатолій Степанович, Скрипник Юрій Олексійович, Фадєєв Олексій Валерієвич
МПК: G01C 19/64
Мітки: здійснення, швидкості, кутової, пристрій, вимірювання, спосіб
Формула / Реферат:
(57) 1. Способ измерения угловой скорости, включающий разделение оптического монохроматического когерентного излучения на две волны, распространение их в катушке волоконного световода во встречных направлениях, сдвиг частоты одной из волн до ее вхождения в катушку волоконного световода, а частота другой волны - после прохождения ею катушки волоконного световода, совмещение встречно распространяющихся волн, образующих интерференционную...
Спосіб безконтактного вимірювання температури та пристрій для його здійснення
Номер патенту: 7482
Опубліковано: 29.09.1995
Автори: Іванник Геннадій Васильович, Чимісов Юрій Михайлович, Карпенко Василь Григорович, Горшунова Ніна Миколаївна
МПК: G01J 5/12
Мітки: температури, пристрій, вимірювання, безконтактного, спосіб, здійснення
Формула / Реферат:
1. Способ бесконтактного измерения температуры, заключающийся в том, что посредством первичного преобразователя поочередно принимают тепловое излучение контролируемого объекта с температурой Тх и два сигнала, уровень которых соответствует интенсивности излучения абсолютно черного тела при двух различных температурах T1 и Т3, преобразуют их в электрические сигналы соответственно Uх, U1 и U2, по соотношению которых определяют искомую...
Спосіб вимірювання температури термопарою і пристрій для його здійснення
Номер патенту: 12392
Опубліковано: 02.12.1996
Автори: Санніков Володимир Юрійович, Дубровний Віктор Опанасович, Скрипник Юрій Олексійович, Кондрашов Сергій Іванович
МПК: G01K 7/02
Мітки: спосіб, термопарою, здійснення, пристрій, температури, вимірювання
Формула / Реферат:
1. Спосіб вимірювання температури термопарою, суть якого у внесенні робочого кінця термопари в середовище, температуру якого вимірюють, регістрації термо-ЕРС на вільних кінцях термопари, нагріванні робочого кінця термопари пропусканням через термопару електричного струму і визначенні температури за формулою, який відрізняється тим, що пропускання електричного струму через термопару здійснюють протягом заданого часу, який вибирають в...
Спосіб вимірювання температури та пристрій для його здійснення
Номер патенту: 10540
Опубліковано: 25.12.1996
Автори: Наконечний Микола Петрович, Іванченко Олександр Васильович, Стретович Анатолій Михайлович, Скрипник Юрій Олексійович
МПК: G01K 7/16
Мітки: здійснення, спосіб, температури, пристрій, вимірювання
Формула / Реферат:
1. Способ измерения температуры, заключающийся в том, что полупроводниковый диод размещают в среде с контролируемой температурой, подают на диод питающее напряжение с полярностью, открывающей р-n переход диода, и измеряют постоянное напряжение, пропорциональное температуре контролируемой среды, отличающийся тем, что питающее напряжение с полярностью, открывающей р-n переход диода, подают через второй однотипный диод, находящийся в...
Спосіб вимірювання вологості та пристрій для його здійснення
Номер патенту: 15065
Опубліковано: 30.06.1997
Автори: Скрипник Юрій Олексійович, Пятін Ілля Станіславович, Ковтун Ігор Іванович
МПК: G01N 27/22
Мітки: вологості, пристрій, вимірювання, здійснення, спосіб
Формула / Реферат:
1. Способ измерения влажности материала, заключающийся в том, что воздействуют высокочастотным переменным напряжением на образцовый конденсатор и емкостной преобразователь влажности, включенные последовательно, определяют фазовый сдвиг между высокочастотными напряжениями на образцовом конденсаторе и емкостном преобразователе влажности и определяют влажность исследуемого материала, отличающийся тем, что после определения фазового сдвига...
Попередній патент: Спосіб вулканізації спіненого матеріалу
Наступний патент: Спосіб спалювання палива
Випадковий патент: Вуглецевий виріб, спосіб виготовлення вуглецевого виробу і його застосування