Спосіб реєстрації падіння щонайменше одного регулюючого елемента в активну зону реактора (варіанти) і пристрій для його здійснення
Формула / Реферат
1. Спосіб реєстрації падіння щонайменше одного регулюючого елемента в активну зону реактора, при якому сигнали детекторів, розташованих вздовж шляху падіння регулюючого елемента сумують і підводять до пристрою контролю, який відрізняється тим, що відповідні сигнали затримують із часом затримки, пропорційним відносно часу падіння, і когерентно підсумовують.
2. Спосіб за пунктом 1, який відрізняється тим, що відповідний час затримки для відповідних сигналів є жорстко заданим.
3. Спосіб за пунктом 1, який відрізняється тим, що відповідний час затримки визначають в залежності від вихідного положення відповідного регулюючого елемента перед падінням.
4. Спосіб за пунктом 1 або 3, який відрізняється тим, що час затримки визначають із відповідної різниці часу між надходженням відповідного сигналу і надходженням останнього сигналу.
5. Спосіб за пунктами 1, 3 або 4, який відрізняється тим, що час затримки визначають за рахунок кореляційного аналізу.
6. Спосіб за будь-яким з пунктів 1 - 5, який відрізняється тим, що створені детекторами сигнали перед їхньою подальшою обробкою спочатку диференціюють.
7. Спосіб за будь-яким з пунктів 1 - 6, який відрізняється тим, що сигнали перед їхнім підсумовуванням підводять до обробки граничного значення так, що підсумовують тільки сигнали, які перевищують задане порогове значення.
8. Спосіб за пунктом 7, який відрізняється тим, що сигнали при обробці граничного значення перетворюють у двійкові сигнали.
9. Спосіб реєстрації падіння щонайменше одного регулюючого елемента в активну зону реактора, при якому сигнали детекторів, розташованих вздовж шляху падіння регулюючого елемента, підсумовують і інтегрують, а також підводять до пристрою контролю, який відрізняється тим, що інтегрований сигнал диференціюють і потім підводять до пристрою контролю.
10. Спосіб реєстрації падіння щонайменше одного регулюючого елемента в активну зону реактора, при якому реєструють сигнали детекторів, розташованих вздовж шляху падіння регулюючого елемента, і підводять до пристрою контролю, який відрізняється тим, що сигнали детекторів підводять до ланок граничного значення, двійкові вихідні сигнали яких затримують за часом таким чином, що вони надходять приблизно одночасно і- затримані двійкові вихідні сигнали підводять до пристрою контролю збігу для розпізнавання падіння регулюючого елемента.
11. Пристрій для реєстрації падіння щонайменше одного регулюючого елемента в активну зону реактора, що містить детектори, розташовані вздовж шляху падіння щонайменше одного регулюючого елемента активної зони реактора, які своїми сигнальними виходами з'єднані з загальною підсумовувальною ланкою, яка на боці виходу підключена до пристрою контролю, який відрізняється тим, що між множиною детекторів регулюючого елемента і підсумовувальною ланкою включена відповідно ланка затримки з часом затримки, пропорційним часу падіння.
12. Пристрій за пунктом 11, який відрізняється тим, що між відповідними детекторами і підсумовувальною ланкою включена відповідно диференціююча ланка.
13. Пристрій за пунктом 11 або 12, який відрізняється тим, що між відповідними детекторами і підсумовувальною ланкою включена відповідно ланка граничного значення.
14. Пристрій за пунктами 11, 12 або 13, який відрізняється тим, що відповідні ланки обробки сигналу і/або пристрій контролю утворені однією або декількома електронно-обчислювальними машинами з програмою.
Текст
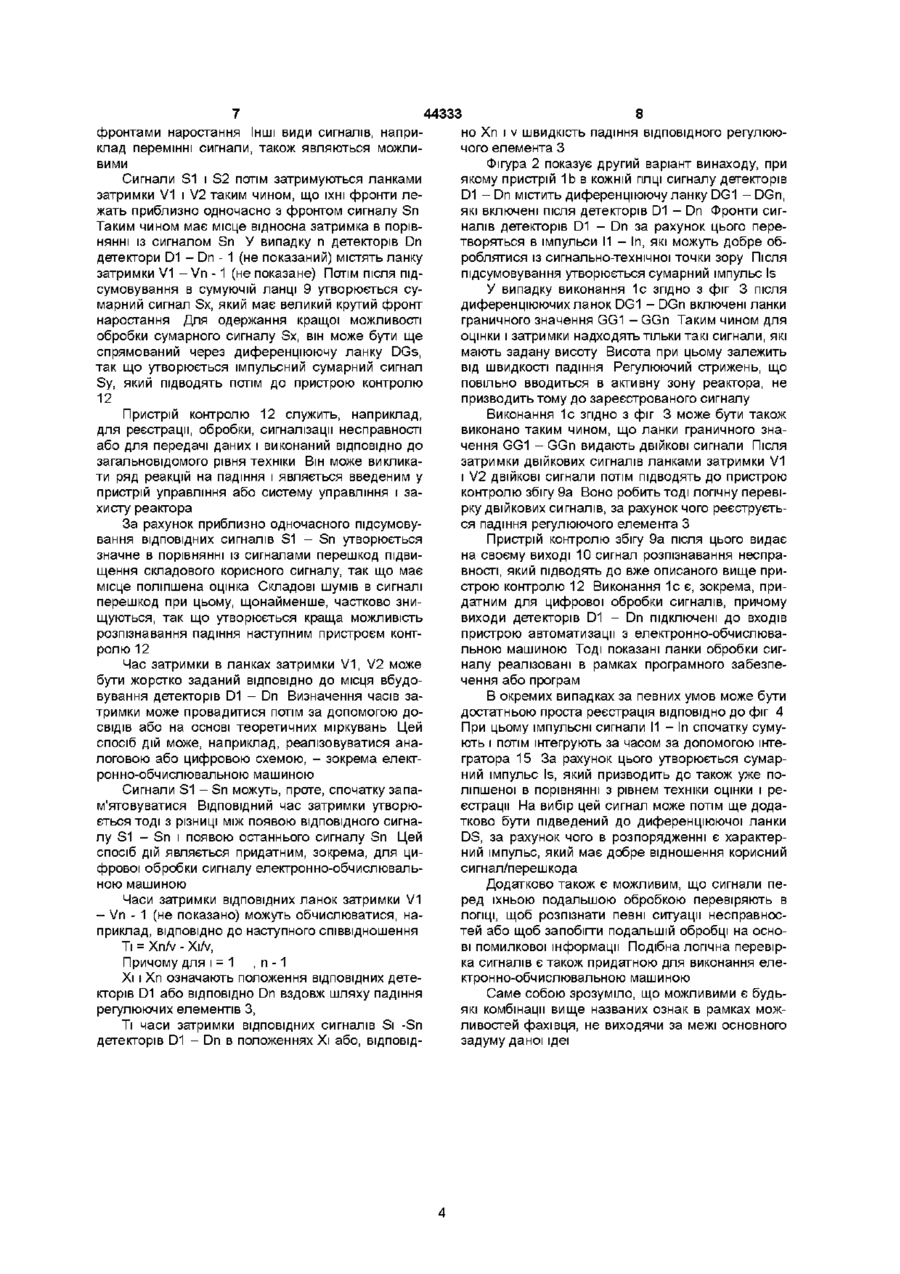
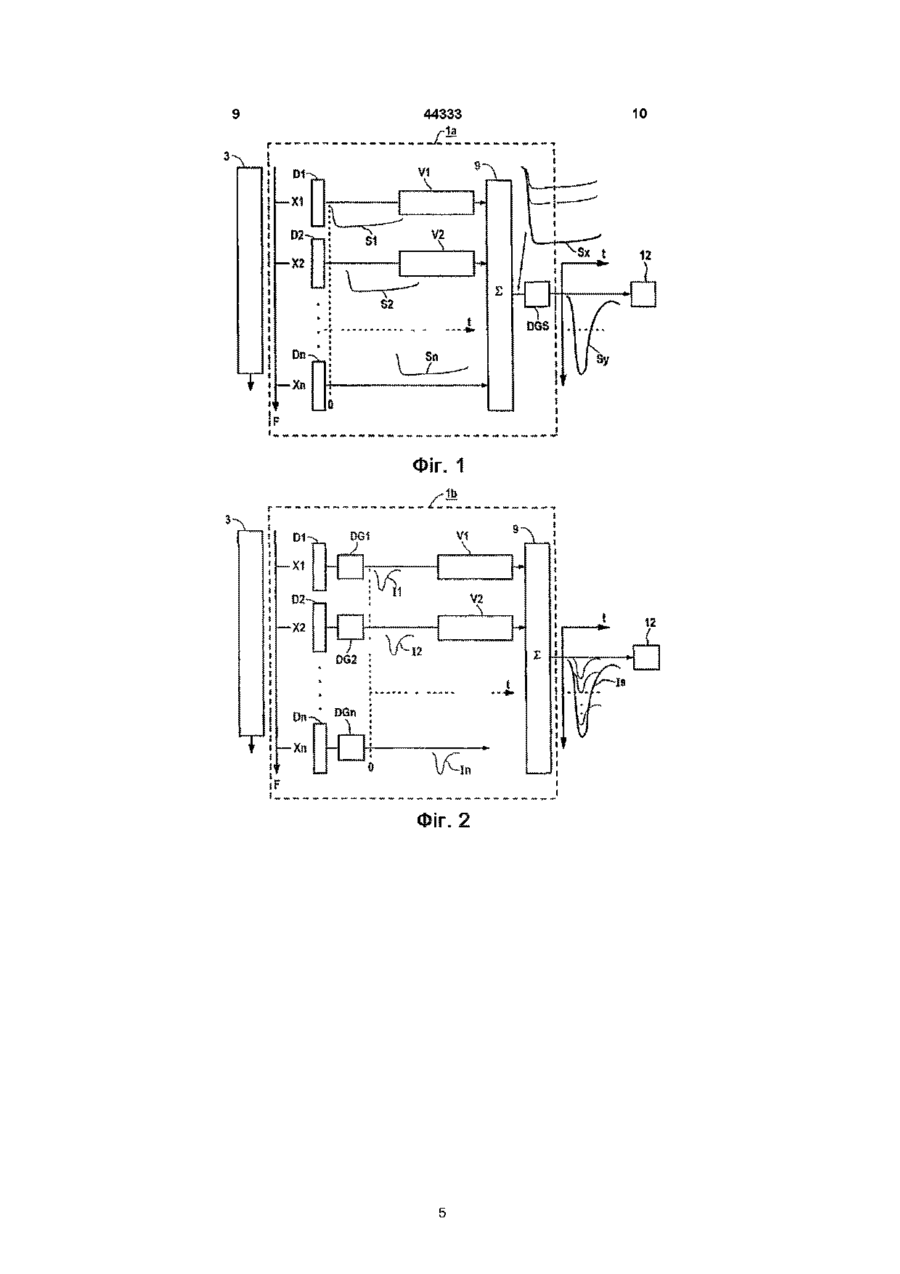
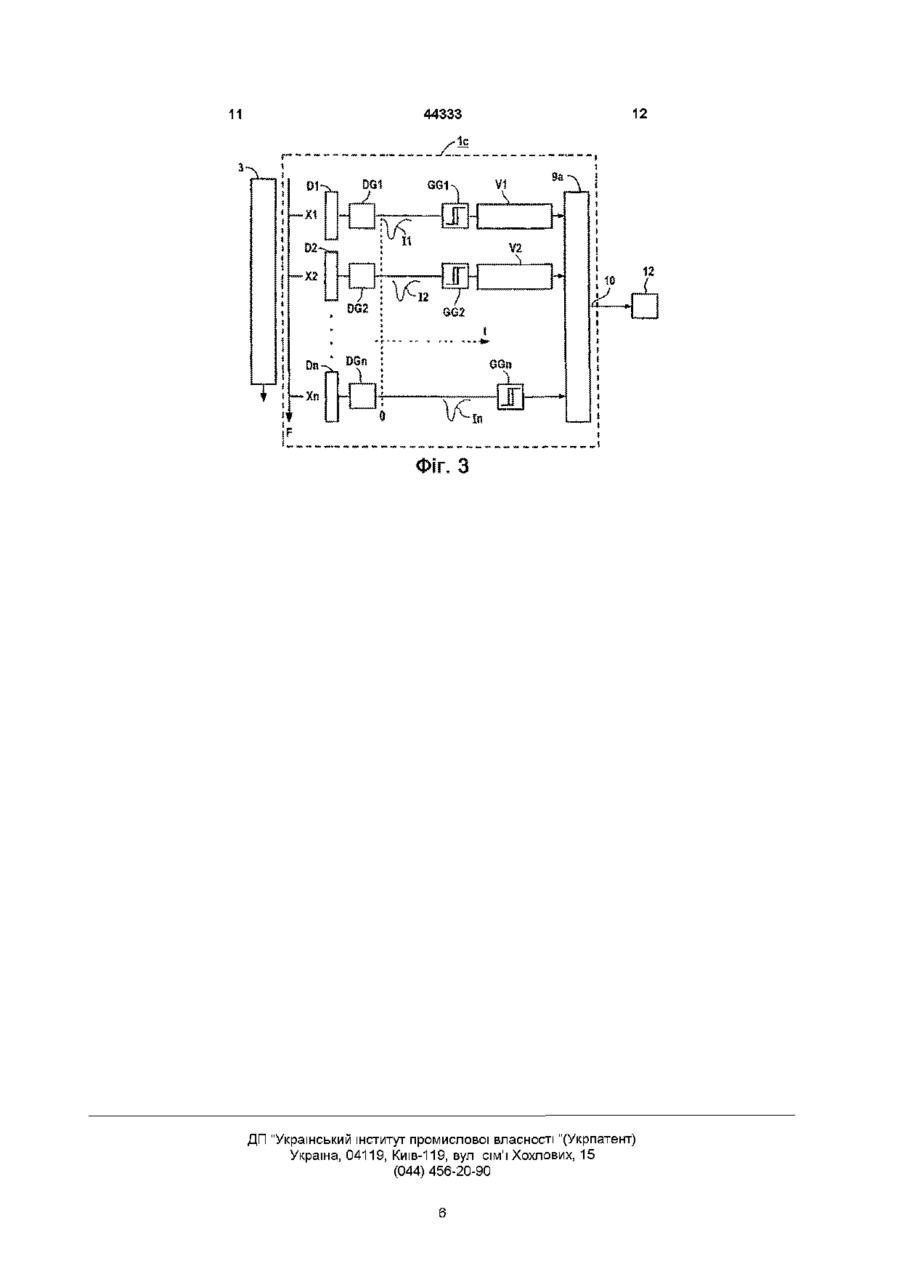
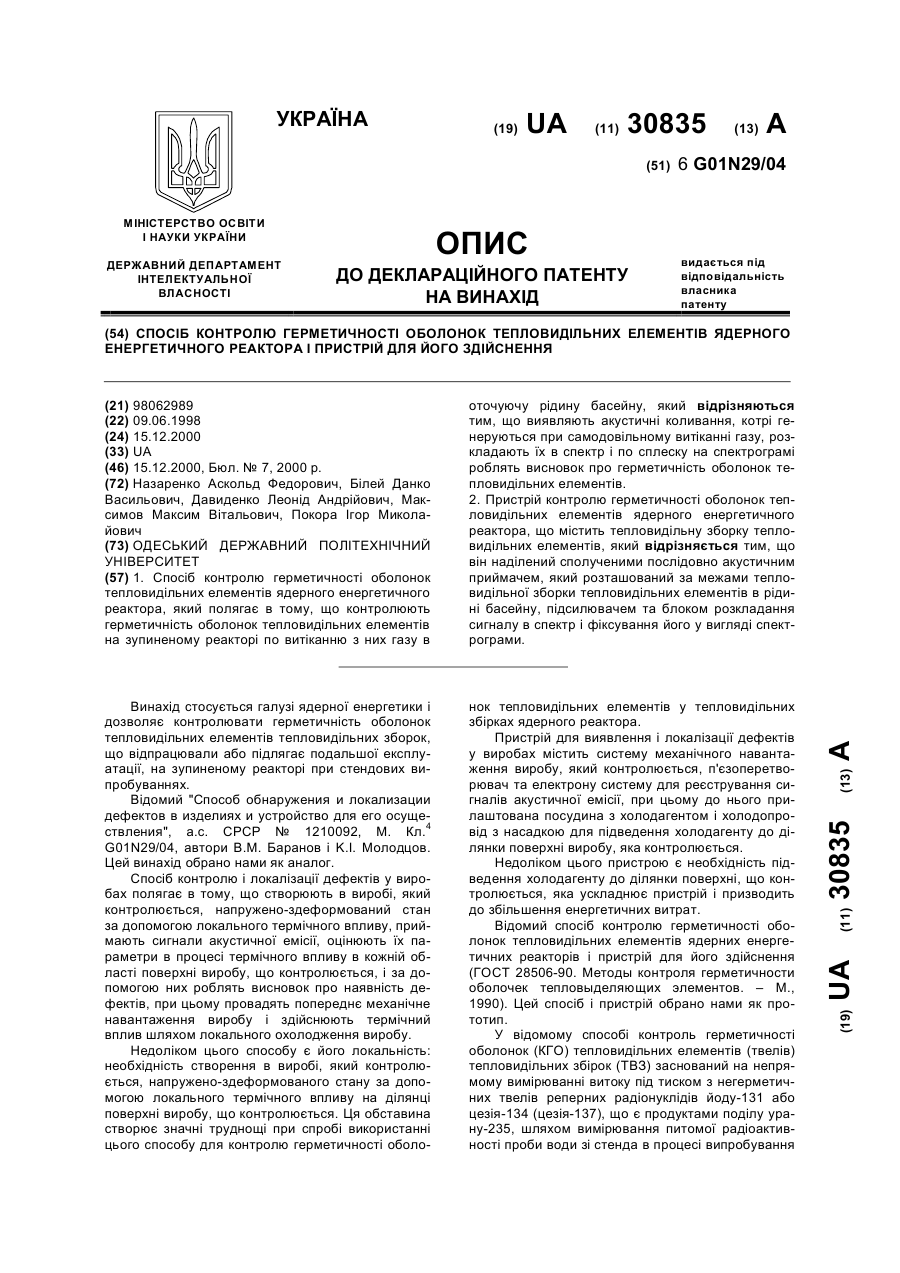
1 Спосіб реєстрації падіння щонайменше одного регулюючого елемента в аісгивну зону реактора, при якому сигнали детекторів, розташованих вздовж шляху падіння регулюючого елемента сумують і підводять до пристрою контролю, який відрізняється тим, що ВІДПОВІДНІ сигнали затримують із часом затримки, пропорційним відносно часу падіння, і когерентно підсумовують 2 Спосіб за пунктом 1, який відрізняється тим, що ВІДПОВІДНИЙ час затримки для ВІДПОВІДНИХ сигналів є жорстко заданим 3 Спосіб за пунктом 1, який відрізняється тим, що ВІДПОВІДНИЙ час затримки визначають в залежності від вихідного положення ВІДПОВІДНОГО регулюючого елемента перед падінням 4 Спосіб за пунктом 1 або 3, який відрізняється тим, що час затримки визначають із відповідної різниці часу між надходженням ВІДПОВІДНОГО сигналу і надходженням останнього сигналу 5 Спосіб за пунктами 1, 3 або 4, який відрізняється тим, що час затримки визначають за рахунок кореляційного аналізу 6 Спосіб за будь-яким з пунктів 1 - 5, який відрізняється тим, що створені детекторами сигнали перед їхньою подальшою обробкою спочатку диференціюють 7 Спосіб за будь-яким з пунктів 1 - 6, який відрізняється тим, що сигнали перед їхнім підсумовуванням підводять до обробки граничного значення так, що підсумовують тільки сигнали, які перевищують задане порогове значення 8 Спосіб за пунктом 7, який відрізняється тим, що сигнали при обробці граничного значення перетво рюють у ДВІЙКОВІ сигнали 9 Спосіб реєстрації падіння щонайменше одного регулюючого елемента в активну зону реактора, при якому сигнали детекторів, розташованих вздовж шляху падіння регулюючого елемента, підсумовують і інтегрують, а також підводять до пристрою контролю, який відрізняється тим, що інтегрований сигнал диференціюють і потім підводять до пристрою контролю 10 Спосіб реєстрації падіння щонайменше одного регулюючого елемента в активну зону реактора, при якому реєструють сигнали детекторів, розташованих вздовж шляху падіння регулюючого елемента, і підводять до пристрою контролю, який відрізняється тим, що сигнали детекторів підводять до ланок граничного значення, ДВІЙКОВІ ВИХІДНІ сигнали яких за тримують за часом таким чином, що вони надходять приблизно одночасно і- затримані ДВІЙКОВІ ВИХІДНІ си гнали підводять до пристрою контролю збігу для розпізнавання падіння регулюючого елемента 11 Пристрій для реєстрації падіння щонайменше одного регулюючого елемента в активну зону реактора, що містить детектори, розташовані вздовж шляху падіння щонайменше одного регулюючого елемента активної зони реактора, які своїми сигнальними виходами з'єднані з загальною підсумовувальною ланкою, яка на боці виходу підключена до пристрою контролю, який відрізняється тим, що між множиною детекторів регулюючого елемента і підсумовувальною ланкою включена ВІДПОВІДНО ланка затримки з часом затримки, пропорційним часу падіння 12 Пристрій за пунктом 11, який відрізняється тим, що між ВІДПОВІДНИМИ детекторами і підсумовуваль ною ланкою включена ВІДПОВІДНО диференціююча ланка 13 Пристрій за пунктом 11 або 12, який відрізняється тим, що між ВІДПОВІДНИМИ детекторами і підсумо вувальною ланкою включена ВІДПОВІДНО ланка граничного значення 14 Пристрій за пунктами 11, 12 або 13, який відрізняється тим, що ВІДПОВІДНІ ланки обробки сигналу і/або пристрій контролю утворені однією або декількома електронно-обчислювальними машинами з програмою О со го го 44333 Винахід стосується способу реєстрації падіння одного або декількох регулюючих елементів в активну зону реактора і пристрою для його здійснення Ядерні реактори електростанцій містять для управління так називані регулюючі елементи, які можуть вводитися в активну зону реактора і виводитися із неї Особливо критичним випадком несправності являється при цьому, якщо один або декілька регулюючих елементів падають в активну зону реактора помилково (на противагу до бажаного падіння, наприклад, при аварійному відключенні) Реактор тоді більше не може оптимально управлятися В такому випадку несправності в результаті утворюються несприятливі відносно вигоряння елемента ЩІЛЬНОСТІ, що виділяє тепло, і розподілу потужності в активній зоні реактора Елементи, що виділяють тепло, при цьому піддаються небезпеці за рахунок появи пікових значень Подібні випадки несправності являються дуже критичними з погляду роботи реактора і надійності електростанції Тому помилкові падіння регулюючих елементів в активну зону реактора повинні швидко розпізнаватися, щоб можна булосвоєчасно почати найкращі контрзаходи Принципово падіння регулюючого елемента в активну зону реактора може бути визначене по впливу на сигнали контрольно-вимірювального устаткування реактора Внаслідок чисельності регулюючих елементів і різноманггних в залежності від положення впливів розпізнавання, проте, являється не простим Для визначення потужності і/або ЩІЛЬНОСТІ потужності в активній зоні реактора або поза и передбачена підхожа КІЛЬКІСТЬ вертикально розташованих груп детекторів Як правило, ці детектори при проходженні одного або декількох регулюючих елементів видають щоразу сигнал, який має фронт Дотепер на практиці сигнали однієї групи детекторів (на кожний регулюючий елемент або групу регулюючих елементів) спочатку диференціюють (щоб одержати імпульс), і після цього сумують так, що має місце загальний сигнал про падіння регулюючих елементів Виявилося, що цей сумарний сигнал, проте, зокрема внаслідок шумів сигналу, не в усіх випадках був придатним для надійного розпізнавання несправності З документа US-PS 4,548,784 у зв'язку з управлінням потужності ядерного реактора відомий спосіб реєстрації падіння принаймні одного регулюючого елемента в активну зону реактора, при якому сигнали розташованих вздовж шляху падіння регулюючого елемента детекторів сумують і підводять до пристрою контролю і наступної оцінки, причому до утворення суми безпосередньо примикає утворення середнього значення В основі винаходу лежить задача вказівки способу, який на основі наявних розташувань детекторів дозволяють робити поліпшене в порівнянні з рівнем техніки розпізнавання несправності при падіннях регулюючих елементів в активну зону реактора Інша задача передбачає вказівку підхожого для цього пристрою Задача ВІДПОВІДНО ДО винаходу вирішується способом реєстрації паління принаймні одного регулюючого елемента в активну зону реактора, при якому сигнали розташованих вздовж шляху паління регулюючого елемента детекторів сумують і підводять до пристрою контролю, причому ВІДПОВІДНІ сигнали перед підсумовуванням затримують з часом затримки, пропорційним відносно часу падіння, і когерентно сумують Таким чином являється можливою поліпшена реєстрація падіння в порівнянні з рівнем техніки Справа в тому, що ВІДПОВІДНІ сигнали на підставі затримок когерентно сумують, за рахунок чого складові перешкод і шумів частково знищуються або усуваються усередненням Амплггуда сумарного сигналу тоді дорівнює сумі окремих сигналів так, що складова шуму являється порівняно малою Розпізнавання несправності за рахунок цього являється особливо надійним Для сигналів події, що відносяться один до одного, створюється таким чином тимчасовий збіг ВІДПОВІДНИЙ час затримки може бути жорстко заданим За рахунок цього виконання ланок затримки являється дуже простим, а загальні витрати низькими Переважно затримка може відбуватися в залежності від відповідної тимчасової різниці між надходженням ВІДПОВІДНОГО сигналу і надходженням останнього сигналу Таким чином утворюється затримка, яка залежить від падіння регулюючого елемента Реєстрація несправності при цьому являється дуже точною Час затримки може бути визначений, наприклад, із співвідношення Ті = Xn/v - Xi/v, причому для 1 = 1, , п -1 Хі і Хп означають положення ВІДПОВІДНИХ детекторів 1 - п вздовж шляху падіння регулюючих елементів, Ті - часи затримки ВІДПОВІДНИХ сигналів Хі або, ВІДПОВІДНО, Хп і v - швидкість падіння регулюючих елементів Тим самим дається просте правило, по якому можуть обчислюватися часи затримки в ланках затримки Часи затримки можуть також визначатися шляхом кореляційного аналізу, за рахунок чого досягнений точний збіг сигналів Далі являється вигідним, якщо ВІДПОВІДНИЙ час затримки визначають в залежності від вихідного положення регулюючого елемента перед падінням Тим самим в кожному робочому положенні регулюючого елемента можливий збіжний контроль Таким чином враховується миттєвий робочий стан За рахунок цього точно враховується різноманітний час падіння, і тим самим досягається висока точність при розпізнаванні несправності Вигідний варіант одержується, якщо сигнали перед підсумовуванням підводять до обробки граничних значень, за рахунок чого підсумовуються тільки сигнали, які перевищують певне задане граничне значення Тим самим для оцінки надходять тільки сигнали з заданою висотою сигналу, за рахунок чого може відбуватися, наприклад, розрізнення між швидким введенням регулюючого еле 44333 ніж у випадку нормальних переміщень регулюючих елементів Крім того, для альтернативного способу можуть бути передбачені подальші альтернативні пристрої ВІДПОВІДНІ ланки обробки сигналу і/або пристрій контролю переважно утворені однією або декількома електронними обчислювальними машинами з програмою Таким чином є надійний контроль несправності, який є швидким і при необхідності може бути реалізований наявною електронною обчислювальною машиною з усіма перевагами цифрової обробки сигналу Винахід, подальші деталі і подробиці пояснюються нижче на прикладах виконання за допомогою креслень При цьому показують Фіг 1 - 4 чотири альтернативних приклади виконання в принциповому представленні для пристроїв реєстрації падінь регулюючих елементів Фіг 1 показує перший пристрій 1а, за допомогою якого може бути зареєстроване падіння регулюючого елемента 3 у не показану більш докладно активну зону реактора (краща форма виконання) Вздовж шляху падіння F регулюючого елемента 3 (або групи регулюючих елементів) на заданих відстанях розташовані детектори D1 - Dn в положеннях Х1 - Х п КІЛЬКІСТЬ І відстані детекторів D1 Dn залежать в основному від бажаної точності реєстрації і від прийнятних витрат Заради простоти на фігурах показані тільки три детектори D1, D2 і Dn В даному випадку, винятково приблизно покаІнше рішення задачі ВІДПОВІДНО ДО винаходу заний спосіб дій на прикладі одного регулюючого дано способом реєстрації падіння регулюючого елемента 3 Він справедливий за змістом для декіелемента в активну зону реактора, при якому сиглькох регулюючих елементів 3 або для всіх регунали-розташованих вздовж шляху падіння регулюлюючих елементів 3 активної зони реактора ючого елемента детекторів сумують і інтегрують, а також підводять до пристрою контролю, причому Детектори D1 - Dn можуть бути виконані саінтегрований сумарний сигнал спочатку підводять мим різноманітним способом Наприклад, вони модо диференціюючої ступіні і потім до пристрою кожуть реагувати на радіоактивність, тепло,-електронтролю Це рішення являється дуже простим і промагнітні впливи або на ІНШІ фізичні впливи Суттєпонує в порівнянні з рівнем техніки поліпшене розвим при цьому є те, що вони в їхньому МІСЦІ вбудопізнавання несправності й оцінку сигналу вування реєструють падіння ВІДПОВІДНОГО регулюючого елемента 3 через фізичний вплив і видають Вирішення наступної задачі удається ВІДПОВІДВІДПОВІДНИЙ сигнал НО до винаходу пристроєм для здійснення вище названого способу, із детекторами, розташованиЗокрема можна використовувати наступні ВІДОми вздовж шляху падіння щонайменше одного реМІ з практики типи детектора детектори нейтронгулюючого елемента активної зони реактора, які ного потоку, гамма, бета, альфа-детектори, вимісвоїми сигнальними виходами з'єднані з загальрювальні зонди або термоелементи місцевої темною сумуючою ланкою, яка на стороні виходу підператури теплоносія Доцільно ДЛЯ даної функції ключена до пристрою контролю, причому між рявикористовуються так чи інакше вже розташовані в дом детекторів регулюючого елемента і сумуючою активній зоні реактора або поза и детектори D1 ланкою включена ланка затримки з часом затримDn Це можуть бути, наприклад, детектори D1 - Dn ки, пропорційним часу падіння Цим пристроєм в для визначення ЩІЛЬНОСТІ потужності S1 - Sn попорівнянні з рівнем техніки можливий збіжний конзначені на фігурах сигнали, що видаються ВІДПОВІтроль сигналів, що призводить до надійного контДНО детекторами D1 - Dn ролю несправності в активній зоні реактора При падінні регулюючого елемента 3 зверху Є сприятливим те, якщо між ВІДПОВІДНИМИ дедонизу детектори D1 - Dn послідовно, щораз при текторами і сумуючою ланкою включена діференпроходженні регулюючого елемента 3, створюють ціююча ланка Таким чином в якості сигналів у розсигнали S1 - Sn із сигнальними фронтами Фронти порядженні є імпульси, що допускають сприятливу (фронти наростання) сигналів S1 - Sn таким чизбіжну обробку сигналів ном з'являються один після одного з тимчасовою затримкою Між ВІДПОВІДНИМИ детекторами і сумуючою ланкою може бути включена ланка граничного знаПредставлення сигнальних фронтів сигналів чення Тим самим для обробки надходять тільки S1 - Sn вибрано на фігурах ВІДПОВІДНО ДО їхньої сигнали, які однозначно відбуваються від падіння тимчасової затримки по осі часу t (пунктирно) В регулюючого елемента Справа втому, що падаюданому випадку виходять з того, що детектори D1 чі регулюючі елементи мають високу швидкість па- Dn видають однаковий сигнал Показані сигнали діння, яка має як наслідок велику висоту сигналу, S1 - Sn тому утворені у вигляді рівних сигналів із мента і падінням, обумовленим несправністю Сигнали при обробці граничних значень можна з вигодою перетворювати в ДВІЙКОВІ сигнали, за рахунок чого одержується можливість оцінки, більш проста в порівнянні з аналоговою формою характеру зміни сигналу, також у цифровій формі Створені детекторами сигнали можна переважно перед їхньою подальшою обробкою також спочатку диференціювати Таким чином замість сигналу фронту в розпорядженні існує імпульс, який дозволяє більш сприятливу сигнально-технічну обробку Альтернативне рішення задачі дано ВІДПОВІДНО до винаходу способом реєстрації падіння принаймні одного регулюючого елемента в активну зону реактора, при якому сигнали детекторів, розташованих вздовж шляху падіння регулюючого елемента, реєструють і підводять до пристрою контролю, причому сигнали детекторів підводять до ланок граничних значень, ДВІЙКОВІ ВИХІДНІ сигнали яких затримують за часом таким чином, що вони присутні приблизно одночасно і причому затримані ДВІЙКОВІ ВИХІДНІ сигнали підводять до пристрою контролю збігу для розпізнавання падіння регулюючого елемента Таким чином є можливою високо точна реєстрація несправності, яка особливо придатна для цифрової обробки сигналів обчислювальною машиною, наприклад, в пристрої техніки управління з мікрокомп'ютером 44333 8 но Хп і v швидкість падіння ВІДПОВІДНОГО регулюючого елемента З Фігура 2 показує другий варіант винаходу, при якому пристрій 1 b в кожній ГІЛЦІ сигналу детекторів D1 - Dn містить диференціюючу ланку DG1 - DGn, які включені після детекторів D1 - Dn Фронти сигналів детекторів D1 - Dn за рахунок цього перетворяться в імпульси 11 - In, які можуть добре оброблятися із сигнально-технічної точки зору Після підсумовування утворюється сумарний імпульс Is У випадку виконання 1с згідно з фіг 3 після диференціюючих ланок DG1 - DGn включені ланки граничного значення GG1 - GGn Таким чином для оцінки і затримки надходять тільки такі сигнали, які мають задану висоту Висота при цьому залежить від швидкості падіння Регулюючий стрижень, що повільно вводиться в активну зону реактора, не призводить тому до зареєстрованого сигналу Пристрій контролю 12 служить, наприклад, Виконання 1с згідно з фіг 3 може бути також для реєстрації, обробки, сигналізації несправності виконано таким чином, що ланки граничного знаабо для передачі даних і виконаний ВІДПОВІДНО ДО чення GG1 - GGn видають ДВІЙКОВІ сигнали Після загальновідомого рівня техніки Він може викликазатримки двійкових сигналів ланками затримки V1 ти ряд реакцій на падіння і являється введеним у і V2 ДВІЙКОВІ сигнали потім підводять до пристрою пристрій управління або систему управління і законтролю збігу 9а Воно робить тоді логічну перевіхисту реактора рку двійкових сигналів, за рахунок чого реєструється падіння регулюючого елемента З За рахунок приблизно одночасного підсумовування ВІДПОВІДНИХ сигналів S1 - Sn утворюється Пристрій контролю збігу 9а після цього видає значне в порівнянні із сигналами перешкод підвина своєму виході 10 сигнал розпізнавання неспращення складового корисного сигналу, так що має вності, який підводять до вже описаного вище примісце поліпшена оцінка Складові шумів в сигналі строю контролю 12 Виконання 1с є, зокрема, приперешкод при цьому, щонайменше, частково знидатним для цифрової обробки сигналів, причому щуються, так що утворюється краща можливість виходи детекторів D1 - Dn підключені до входів розпізнавання падіння наступним пристроєм контпристрою автоматизації з електронно-обчислюваролю 12 льною машиною Тоді показані ланки обробки сигналу реалізовані в рамках програмного забезпеЧас затримки в ланках затримки V1, V2 може чення або програм бути жорстко заданий ВІДПОВІДНО ДО МІСЦЯ вбудовування детекторів D1 - Dn Визначення часів заВ окремих випадках за певних умов може бути тримки може провадитися потім за допомогою ДОдостатньою проста реєстрація ВІДПОВІДНО ДО фіг 4 СВІДІВ або на основі теоретичних міркувань Цей При цьому імпульсні сигнали 11 - In спочатку сумуспосіб дій може, наприклад, реалізовуватися анають і потім інтегрують за часом за допомогою інтелоговою або цифровою схемою, - зокрема електгратора 15 За рахунок цього утворюється сумарронно-обчислювальною машиною ний імпульс Is, який призводить до також уже поліпшеної в порівнянні з рівнем техніки оцінки і реСигнали S1 - Sn можуть, проте, спочатку запаєстрації На вибір цей сигнал може потім ще додам'ятовуватися ВІДПОВІДНИЙ час затримки утворютково бути підведений до диференціюючої ланки ється тоді з різниці між появою ВІДПОВІДНОГО сигнаDS, за рахунок чого в розпорядженні є характерлу S1 - Sn і появою останнього сигналу Sn Цей ний імпульс, який має добре відношення корисний спосіб дій являється придатним, зокрема, для цисигнал/перешкода фрової обробки сигналу електронно-обчислювальною машиною Додатково також є можливим, що сигнали перед їхньою подальшою обробкою перевіряють в Часи затримки ВІДПОВІДНИХ ланок затримки V1 ЛОГІЦІ, щоб розпізнати певні ситуації несправнос- Vn - 1 (не показано) можуть обчислюватися, натей або щоб запобігти подальшій обробці на осноприклад, ВІДПОВІДНО до наступного співвідношення ві помилкової інформації Подібна логічна перевірТі = Xn/v - Xi/v, ка сигналів є також придатною для виконання елеПричому для 1=1 , п -1 ктронно-обчислювальною машиною Хі і Хп означають положення ВІДПОВІДНИХ детекторів D1 або ВІДПОВІДНО Dn вздовж шляху падіння Саме собою зрозуміло, що можливими є будьрегулюючих елементів З, які комбінації вище названих ознак в рамках можливостей фахівця, не виходячи за межі основного Ті часи затримки ВІДПОВІДНИХ сигналів Si -Sn задуму даної ідеї детекторів D1 - Dn в положеннях Хі або, ВІДПОВІДфронтами наростання Інші види сигналів, наприклад перемінні сигнали, також являються можливими Сигнали S1 і S2 потім затримуються ланками затримки V1 і V2 таким чином, що їхні фронти лежать приблизно одночасно з фронтом сигналу Sn Таким чином має місце відносна затримка в порівнянні із сигналом Sn У випадку п детекторів Dn детектори D1 - Dn - 1 (не показаний) містять ланку затримки V1 - Vn -1 (не показане) Потім після підсумовування в сумуючій ланці 9 утворюється сумарний сигнал Sx, який має великий крутий фронт наростання Для одержання кращої можливості обробки сумарного сигналу Sx, він може бути ще спрямований через диференціюючу ланку DGs, так що утворюється імпульсний сумарний сигнал Sy, який підводять потім до пристрою контролю 12 44333 ФІГ. 1 Фіг. 2 11 12 44333 • 1c DS1 GG1X U 11 9a V1 J V2 -X2 10 DG2 GG2 DGn •Xn GGn VC, Фіг. З ДП "Український інститут промислової власності "(Укрпатент) Україна, 04119, Киів-119, вул сім'ї Хохлових, 15 (044) 456-20-90 12
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G21C 17/10, G21C 7/00
Мітки: зону, елемента, щонайменше, пристрій, спосіб, реактора, варіанти, регулюючого, активну, одного, здійснення, реєстрації, падіння
Код посилання
<a href="https://ua.patents.su/6-44333-sposib-reehstraci-padinnya-shhonajjmenshe-odnogo-regulyuyuchogo-elementa-v-aktivnu-zonu-reaktora-varianti-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб реєстрації падіння щонайменше одного регулюючого елемента в активну зону реактора (варіанти) і пристрій для його здійснення</a>
Спосіб контролю герметичності оболонок тепловидільних елементів ядерного енергетичного реактора і пристрій для його здійснення
Номер патенту: 30835
Опубліковано: 15.12.2000
Автори: Білей Данко Васильович, Назаренко Аскольд Федорович, Давиденко Леонід Андрійович, Максимов Максим Вітальович, Покора Ігор Миколайович
МПК: G01N 29/04
Мітки: реактора, ядерного, герметичності, оболонок, пристрій, контролю, спосіб, здійснення, елементів, тепловидільних, енергетичного
Текст:
...герметичності оболонок тепловидільних елементів ядерного енергетичного реактора і, таким чином, забезпечити експресаналіз герметичності оболонок, спростити обробку вимірювань та зменшити енергетичні витрати. В основу винаходу також поставлено завдання створити такий пристрій для здійснення запропонованого способу, у якому нова конструкція і нові зв'язки дозволяють зменшити енергетичні затрати та скоротити час проведення контролю....
Спосіб впливу на привибійну зону свердловини та пристрій для його здійснення
Номер патенту: 28972
Опубліковано: 16.10.2000
Автори: Коляда Юрій Євгенович, Коляда Геннадій Євгенович, Федун Віктор Іванович
МПК: E21B 43/00
Мітки: привибійну, зону, здійснення, впливу, спосіб, пристрій, свердловини
Формула / Реферат:
Спосіб впливу на привибійну зону свердловини, що включає спуск в свердловину джерела пружних хвиль, його періодичне спрацьовування з генерацією пружних хвиль, які здійснюють вплив на привибійну зону з чисткою вибою та збільшення проникності пласта, який відрізняється тим, що джерело пружних хвиль розміщується в рідині поблизу устя і канал свердловини використовується як лінія передачі енергії у привибійну зону.2. Пристрій для...
Спосіб реєстрації шкірно-гальванічної реакції та пристрій для його здійснення
Номер патенту: 39915
Опубліковано: 16.07.2001
Автори: Юдін Юрій Сергійович, Гончар Олександр Іванович, Гергель Віктор Миколайович, Арініч Олександр Олексійович, Захараш Михайло Петрович
МПК: A61B 5/05
Мітки: реєстрації, здійснення, реакції, шкірно-гальванічної, пристрій, спосіб
Формула / Реферат:
1. Спосіб реєстрації шкірно-гальванічної реакції (ШГР), який включає стимуляцію ділянки шкіри постійним струмом заданого напрямку і величини, а також фільтрування-заглушення завад промислової частоти, підсилення сигналу, розподіл на тонічну і фазичну складові та їх реєстрацію, який відрізняється тим, що додатково проводять стимуляцію другої ділянки шкіри напругою, рівною по величині напрузі, викликаної похідним стимулюючим еталонним струмом...
Спосіб реєстрації потоку продукції та пристрій для його здійснення
Номер патенту: 27029
Опубліковано: 28.02.2000
Автори: НЕФ Петер, ВАЙБЄЛЬ Роман, ГМЮР Бруно
МПК: B01F 3/00, G01G 19/00, G01G 11/00, B01F 5/26, B01F 15/04, G01G 13/00, B01F 15/02
Мітки: спосіб, потоку, здійснення, продукції, пристрій, реєстрації
Формула / Реферат:
1. Способ регистрации потока продукции с неблагоприятными параметрами текучести в производственной установке типа мельницы, отличающийся тем, что поступающий поток продукта во время периодических циклов наполнения направляют в вертикальный весовой бункер, из упомянутого бункера выгружают, непрерывно по существу горизонтально с помощью разгрузочного шнека с регулируемой скоростью вращения, во время прекращения подачи в весовой бункер измеряют...
Спосіб подання твердого палива та пристрій для його здійснення, спосіб одержання горючих газів з твердого палива (варіанти) та пристрій для його здійснення (варіанти), спосіб підвищення якості сирих фосфатів, я
Номер патенту: 42672
Опубліковано: 15.11.2001
Автори: Сінякевіч Борис, Хаскін Марк, Яффе Елі, Гольдман Даніель, Дорон Бенжамін, Броніцкі Люсьєн І.
МПК: F23B 30/00
Мітки: горючих, фосфатів, одержання, палива, спосіб, сирих, здійснення, підвищення, подання, газів, варіанти, пристрій, твердого, якості
Формула / Реферат:
1. Способ подачи твердого топлива, содержащего газы с относительно низким давлением, к участку, содержащему газы с более высоким давлением, отличающийся тем, что осуществляют прием и транспортировку твердого топлива вдоль шнекового конвейера к ротору, имеющему основной ротор, круглую плиту и дополнительный ротор, размещенные на оси шнекового конвейера ближе к его концу для подачи твердого топлива в печь.2. Способ по п. 1, отличающийся...
Попередній патент: Просочувальний склад для одержання протикорозійного пакувального паперу
Наступний патент: Стабілізатор кардіоритму
Випадковий патент: Пристрій для дренування черевної порожнини при розповсюдженому гнійному перитоніті