Спосіб виведення космічного апарата на задану орбіту
Номер патенту: 57487
Опубліковано: 25.02.2011
Автори: Бондаренко Сергій Григорович, Хорольський Петро Георгійович
Формула / Реферат
1. Спосіб виведення космічного апарата ракетою-носієм на задану орбіту по попередньо визначеній програмі руху, оснований на визначенні очікуваних відхилень кінцевих параметрів орбіти від заданих значень та їх компенсації зміною програми руху шляхом уточнення відповідних попередньо визначених програм керування за допомогою поправок до них, який відрізняється тим, що очікувані кінцеві відхилення по дальності та часу компенсують зміною рівнів тяги ракети-носія, а кінцеві відхилення інших параметрів орбіти внаслідок таких змін та збурень компенсують зміною кутових програм керування, зокрема боковий промах компенсують зміною програми кута рискання, для чого ракету-носій оснащують щонайменше двома ступенями з маршовими керованими двигунними установками, тяги яких регулюються, причому для кожного з цих ступенів, крім останнього, визначають поточні відхилення від програми руху по дальності ![]() та часу
та часу ![]() , по них формують поправки до програм керування, наприклад, поправки до програмних рівнів масової секундної витрати палива при постійному значенні питомого імпульсу тяги поточного з вказаних ступенів визначають за залежністю виду
, по них формують поправки до програм керування, наприклад, поправки до програмних рівнів масової секундної витрати палива при постійному значенні питомого імпульсу тяги поточного з вказаних ступенів визначають за залежністю виду ![]() , дe
, дe ![]() ,
, ![]() - коефіцієнти, які визначають із умови компенсації кінцевих відхилень, а для наступного за ним ступеня визначають за залежністю виду
- коефіцієнти, які визначають із умови компенсації кінцевих відхилень, а для наступного за ним ступеня визначають за залежністю виду  , де
, де ![]() ,
, ![]() - попередньо визначені тривалості роботи двигунних установок до моменту вичерпання палива поточного і наступного ступенів відповідно;
- попередньо визначені тривалості роботи двигунних установок до моменту вичерпання палива поточного і наступного ступенів відповідно; ![]() ,
, ![]() - попередньо визначена масова секундна витрата палива поточного та наступного ступеня з керованою двигунною установкою відповідно, при цьому, якщо наступний ступінь є останнім із ступенів з керованою установкою, то для нього поправку визначають по останніх значеннях
- попередньо визначена масова секундна витрата палива поточного та наступного ступеня з керованою двигунною установкою відповідно, при цьому, якщо наступний ступінь є останнім із ступенів з керованою установкою, то для нього поправку визначають по останніх значеннях ![]() та
та ![]() передостаннього такого ступеня, що були прийняті для уточнення програми тяги, а поправку до програмного значення кута рискання визначають, наприклад, за залежністю
передостаннього такого ступеня, що були прийняті для уточнення програми тяги, а поправку до програмного значення кута рискання визначають, наприклад, за залежністю ![]() , де
, де ![]() ,
, ![]() - коефіцієнти, які визначають із умови компенсації кінцевих відхилень.
- коефіцієнти, які визначають із умови компенсації кінцевих відхилень.
2. Спосіб за п. 1, який відрізняється тим, що поправку для наступного за поточним із ступенів з керованою тягою визначають із залежності виду ![]() , де
, де ![]() ,
, ![]() - коефіцієнти, які визначають із умови компенсації кінцевих відхилень.
- коефіцієнти, які визначають із умови компенсації кінцевих відхилень.
3. Спосіб за пп. 1, 2, який відрізняється тим, що коефіцієнти ![]() ,
, ![]() ,
, ![]() ,
, ![]() визначають із залежностей
визначають із залежностей
![]() ,
, ![]() ,
,
 ,
, ![]() , де
, де ![]() - функції чутливості кінцевих значень часу та дальності до масової секундної витрати палива поточного і наступного ступенів та до поточних значень часу і дальності в поточний час руху відповідно, які визначають для попередньо визначеної програми руху.
- функції чутливості кінцевих значень часу та дальності до масової секундної витрати палива поточного і наступного ступенів та до поточних значень часу і дальності в поточний час руху відповідно, які визначають для попередньо визначеної програми руху.
Текст
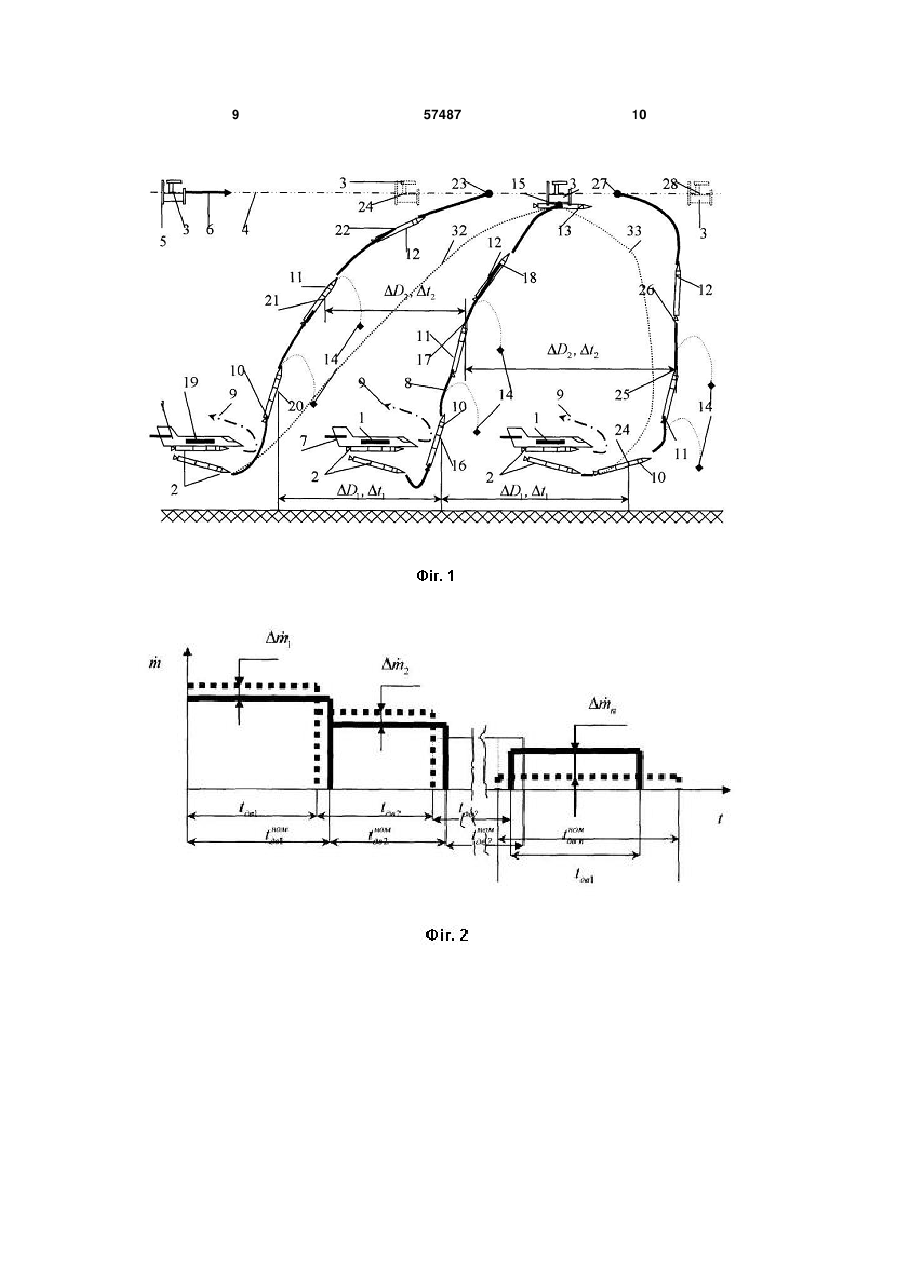
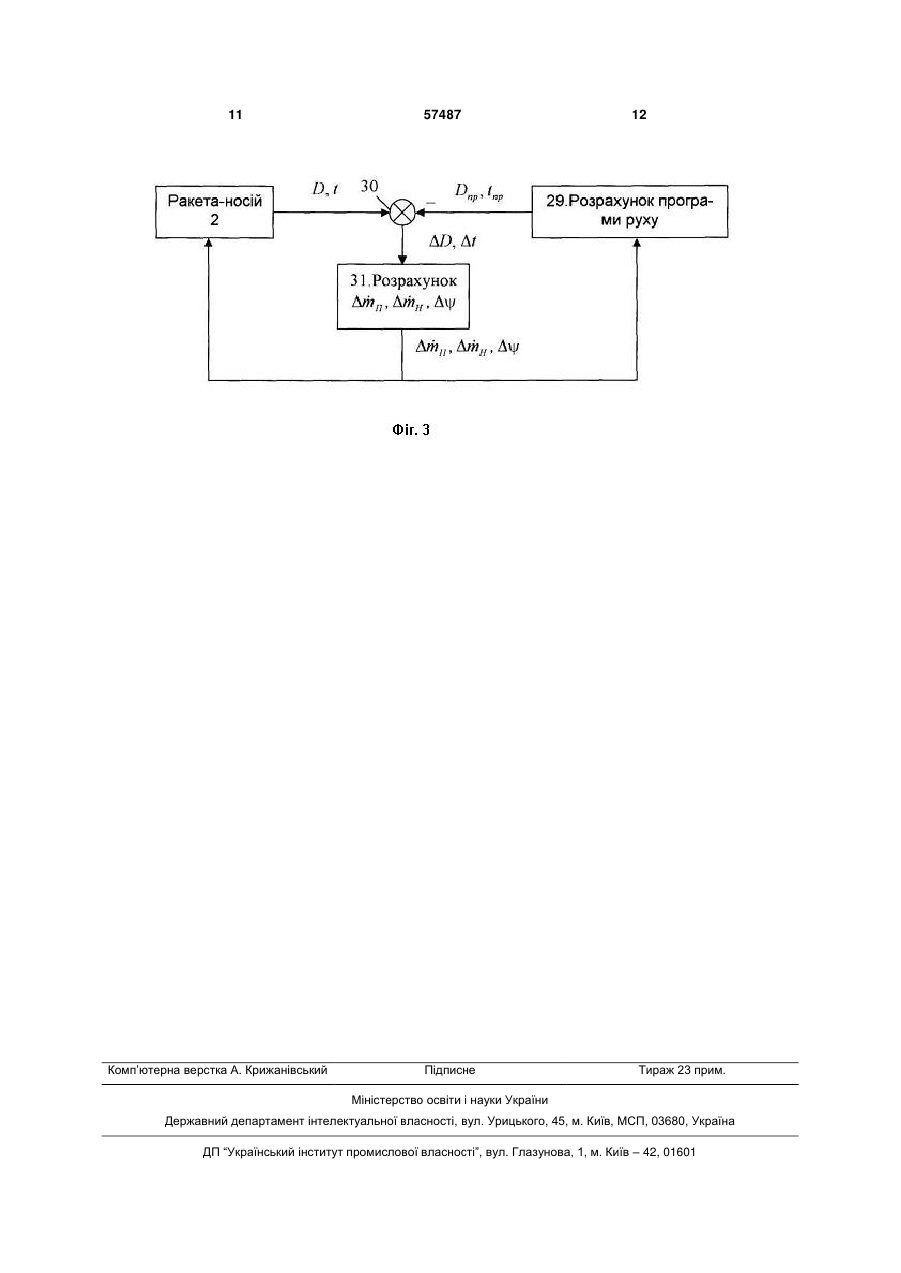
1. Спосіб виведення космічного апарата ракетою-носієм на задану орбіту по попередньо визначеній програмі руху, оснований на визначенні очікуваних відхилень кінцевих параметрів орбіти від заданих значень та їх компенсації зміною програми руху шляхом уточнення відповідних попередньо визначених програм керування за допомогою поправок до них, який відрізняється тим, що очікувані кінцеві відхилення по дальності та часу компенсують зміною рівнів тяги ракети-носія, а кінцеві відхилення інших параметрів орбіти внаслідок таких змін та збурень компенсують зміною кутових програм керування, зокрема боковий промах компенсують зміною програми кута рискання, для чого ракету-носій оснащують щонайменше двома ступенями з маршовими керованими двигунними установками, тяги яких регулюються, причому для кожного з цих ступенів, крім останнього, визначають поточні відхилення від програми руху по дальності D та часу t , по них формують поправки до програм керування, наприклад, поправки до програмних рівнів масової секундної витрати палива при постійному значенні питомого імпульсу тяги поточного з вказаних ступенів ви значають за залежністю виду m d D t , 2 (19) 1 3 Корисна модель відноситься до аерокосмічної техніки, конкретно - до керування орбітальними маневрами верхніх ступенів ракет-носіїв, розгінних блоків та космічних апаратів. Відомий спосіб виведення на орбіту супутника за допомогою твердопаливного ракетного двигуна [1], за яким визначають рух ракети-носія по траєкторії і в поперечному напрямку відносно орбіти супутника. По відносних значеннях параметрів руху, тобто відхиленнях від параметрів руху супутника, визначають потрібну швидкість ракети за умови компенсації цих відхилень до моменту вигоряння твердого палива. Недоліком способу є неможливість точного виведення супутника в задану точку орбіти в заданий час в разі великих початкових відхилень точки старту по дальності і часу і внаслідок відносно великих розкидів секундного видатку палива. Спосіб придатний тільки тоді, коли точно співпадають час руху супутника до заданої точки орбіти і час повного вигоряння палива. Відомий спосіб корекції параметрів програми зміни поздовжнього руху при термінальному керуванні наведенням розгінного блоку на задану орбіту [2], за яким корегують попередньо визначену програму руху на прогнозований момент відсічки тяги, а саме: відхилення радіусу та радіальної швидкості від заданих значень. Недоліком способу є неможливість точного виведення супутника в задану точку орбіти в заданий час внаслідок керування саме відхиленнями радіусу та радіальної швидкості без відслідковування та стабілізації дальності та часу руху. Найбільш близьким аналогом є спосіб формування термінального керування наведенням разгінного блока на задану орбіту [3] по попередньо визначеній програмі руху, оснований на визначенні очікуваних відхилень кінцевих параметрів орбіти від заданих значень та їх компенсації шляхом зміни програми руху шляхом уточнення відповідних попередньо визначених програм керування за допомогою поправок до них, які, в свою чергу, визначають за допомогою функцій чутливості програми до зміни параметрів заданої орбіти. В якості відхилень кінцевих параметрів орбіти в способі використовують відхилення радіусу та радіальної швидкості. Це є недоліком способу, бо він непридатний для виведення супутника в задану точку орбіти в заданий час. Загальним недоліком усіх наведених способів є придатність їх тільки для літальних апаратів згаданого класу з некерованими двигунними установками. Навіть при керованих двигунних установках ці способи не дозволяють використовувати переваги можливості керування тягою для забезпечення виведення супутника в задану точку орбіти в заданий час. В основу корисної моделі поставлена задача розробки процесу виведення космічного апарата ракетою-носієм на задану орбіту в задану її точку в заданий час мінімальної складності, високих точності і ефективності. Поставлена задача вирішується тим, що в процесі виведення космічного апарата ракетою 57487 4 носієм на задану орбіту по попередньо визначеній програмі руху, оснований на визначенні очікуваних відхилень кінцевих параметрів орбіти від заданих значень та їх компенсації зміною програми руху шляхом уточнення відповідних попередньо визначених програм керування за допомогою поправок до них, очікувані кінцеві відхилення по дальності та часу компенсують зміною рівнів тяги ракетиносія, а кінцеві відхилення інших параметрів орбіти внаслідок таких змін та збурень компенсують зміною кутових програм керування, зокрема боковий промах компенсують зміною програми кута нишпорення, для чого ракету-носій оснащують щонайменше двома ступенями з маршовими керованими двигунними установками, тяги яких регулюються, для кожного з цих ступенів крім останнього визначають поточні відхилення від програми руху по дальності D та часу t , по них формують поправки до програм керування, наприклад, поправки до програмних рівнів масового секундного видатку палива при постійному значенні питомого імпульсу тяги поточного з вказаних ступенів визначають за залежністю виду m d D t , де d - коефіцієнти, які визначають із умови компенсації кінцевих відхилень, а для наступного за ним ступеня визначають за залежністю виду 1 t t m / m 1 mH , де mH 1 t / m tH 1 m H t , tH - попередньо визначені тривалості роботи двигунних установок до моменту вичерпання палива поточного і наступного ступенів відповідно; m , mH - попередньо визначений масовий секундний видаток палива поточного та наступного ступеня з керованою двигунною установкою відповідно, причому, якщо наступний ступінь є останнім із ступенів з керованою установкою, то для нього поправку визначають по останніх значеннях D та t передостаннього такого ступеня, що були прийняті для уточнення програми тяги, а поправку до програмного значення кута нишпорення визначають, наприклад, за залежністю D t , де , - коефіцієнти, які визначають із умови компенсації кінцевих відхилень. Поправку для наступного за поточним із ступенів з керованою тягою визначають із залежності виду mH dH mH H t , де dH , H - коефіцієнти, які визначають із умови компенсації кінцевих відхилень. Коефіцієнти d , , dH , H визначають із залежностей t D Dk tk Dk tk , d k k m H D mH m m mH Dk tk m t H Dk tk Dk tk m m m m H H , 5 tk m dH Dk tk m m H 57487 Dk D d , Dk tk d H m mH Dk tk mH m Dk tk Dk tk H m t m m H sk sk , , s t, D, i , H - функції чутливості , де mi s кінцевих значень часу та дальності до масового секундного видатку палива поточного і наступного ступенів та до поточних значень часу і дальності в поточний час руху відповідно, які визначають для попередньо визначеної програми руху. Суть корисної моделі продемонстрована на кресленні. На Фіг.1 зображено варіанти виведення космічного апарата на орбіту, на Фіг.2 зображено діаграми секундного видатку палива, на Фіг.3 зображено схему алгоритму керування ракетою-носіем. Заявлена корисна модель реалізується таким чином. Найбільші кінцеві відхилення можливі при великих початкових відхиленнях, які притаманні в першу чергу для рухомого старту і для задачі зустрічі з рухомим об'єктом. На Фіг.1 показано розгортку сферичного шару в площині польоту літаканосія (ЛН) 1 з багатоступеневою ракетою-носієм (РН) 2, яка виводить корисний вантаж для стиковки з космічним апаратом (КА) 3. КА 3 рухається по орбіті 4 з початкової позиції 5 у напрямку 6. РН 2 стартує з ЛН 1 в розрахунковій позиції 7 і виводиться по попередньо визначеній програмі руху номінальній траєкторії 8 D 0, t 0 . А ЛН 1 після скиду РН 2 повертається до аеродрому по траєкторії 9. В прикладі, що розглядається, РН 2 складається з 3-х ступенів 10, 11, 12 відповідно та корисного вантажу (KB) 13. На Фіг.1 номеру ступеня (С) відповідає кількість поперечних рисочок на зображенні РН. В польоті РН 2 скидає відповідні відокремлювані частини 14. В разі відсутності збурень та початкових відхилень траєкторія РН 2, що відповідає попередньо визначеній, наприклад до старту, програмі руху, забезпечує виведення KB 13 в задану точку 15 на орбіті 4 в заданий час tk, де відбувається стиковка KB 13 з КА 3. На цій траєкторії перший ступінь С 10 РН 2 займає позицію 16, другий С 11 - позицію 17, третій С 12 - позицію 18, KB 13 - позицію 15. В разі відсутності корекції тяги РН 2 і при початкових відхиленнях D1 0 , t1 0 РН 2 стартує з позиції 19 і летить по попередньо, до старту, визначеній програмі руху. При відсутності інших збурень ступені РН 2 проходять позиції послідовно 20, 21, 22. KB виходить на орбіту в точку 23 з недольотом до заданої точки 15. КА 3 знаходиться в даному разі в поз. 24 також з недольотом до точки 23. Причому вихід на задану орбіту відбувся раніше заданого, оскільки час польоту визначається запасом палива і при попередньо заданому на момент старту видатку палива час руху співпадає 6 з розрахунковим значенням, визначеним без урахування початкових відхилень по дальності і часу. В такому випадку якщо і можлива зустріч на орбіті, то не в заданий час. Для одного і того ж поточного моменту часу t мають місце поточні відхилення по дальності і часу. На Фіг.1 це показано для відповідних позицій 20 і 16: D1 0 , t1 0 . Для поз. 21 і 17 це D2 0 , t2 0 . У разі початкових відхилень D1 0 , t1 0 , відсутності інших збурень і польоту по попередньо, до старту, визначеній програмі руху РН 2 летить по розрахунковій траєкторії, яка на Фіг.1 проходить через поз. 24 - 26, які відповідають її ступеням. Вона виходить на задану орбіту в точці 27 вже запізно і КА 3 вже знаходиться в поз. 28, тобто попереду KB. Навіть, якби зустріч і відбулася, то час би не відповідав заданому значенню. Приймемо, що тяга регулюється на 1-му, 2-му ступенях (С 10, 11) і на KB 13. Діаграми видатків палива показані на Фіг.2. Для ступенів, двигунні установки (ДУ) яких мають регульовані тяги, діаграми виділені товстими лініями. Для попередньо визначених програм часи роботи тривалості роботи двигунів показані як tном , tном , tном , tном i віддв1 дв2 двп дв ? повідають ДУ С 10, С 11, С 12, KB 13. Процес, що заявляється, реалізується однаково в будь-який поточний час від моменту старту до останнього уточнення програм керування на передостанньому ступеню із числа ступенів з керованими ДУ (КДУ) - на С 11. На останньому ступені (KB 13) реалізується остання визначена поправка до секундного видатку палива (СВП) mКВ . Процес може бути реалізований одноразово або циклічно з тактом наведення РН. Внаслідок відхилення по часу та зміни програм СВП можлива поява бокового відхилення, яке компенсують програмою кута нишпорення (КН). Як показано на Фіг.3, на поточний момент часу t (на момент старту або на момент поточного уточнення програми руху) системою навігації РН 2 визначають її дальність D відносно заданої точки 15. Блоком розрахунку програми руху 29 видають програмні значення дальності і часу Dпp, tпp. Ці дані порівнюють в компараторі 30 і видають у вигляді значень відхилень D, t в блок розрахунку поправок СВП та КН 31. До старту попередньо визначають програму руху і відповідні їй програми керування. В нашому випадку - це програми СВП та КН. З початку роботи першого ступеня з КДУ та в наступні моменти корекції цих програм (наступні такти наведення) спершу визначають поправку до СВП поточного ступеня з КДУ із залежності виду m d D t , де d , - коефіцієнти, які визначають із умови компенсації кінцевих відхилень. Потім визначають поправку до СВП для наступного за поточним ступенем з КДУ із залежності 1 t t m / m 1 mH , mH 1 де tH tH 1 m / m 7 57487 t , tH - попередньо визначені тривалості роботи двигунних установок до моменту вичерпання палива поточного і наступного ступенів відповідно. Визначають поправку до КН поточного ступеня з КДУ із залежності виду: D t , де , - коефіцієнти, які визначають із умови компенсації кінцевих відхилень. Поправку m видають на реалізацію в систему керування СВП РН 2, а поправку - в систему стабілізації ракети-носія. В нашому прикладі, якщо поточним є перший С 10, то наступний - це другий С 11. А якщо поточний другий С 11, то наступний ступень - це KB 13. Крім того, поправки m , mH , видають у блок розрахунку програми руху 29, де уточнюють програми керування СВП та КН. По уточненим програмам керування уточнюють програму руху. Далі ці програми використовують як попередньо визначені програми. Уточнення програм відбувається подібно до вищезазначених аналогів. Якщо програми уточнюються циклічно - на кожному такті наведення або в границях цього такту, то описаний процес повторюється в кожному циклі. Внаслідок цього діаграми і тривалості СВП приймуть вигляд та рівні як на Фіг.2: tдв1, tдв2, tдв?, tдвп. Таким чином, при реалізації заявленого процесу при D1 0 , t1 0 РН 2 по траєкторії 32 (см. Фіг.1) виведе KB 13 в задану точку орбіти в заданий час, аналогічно при D1 0 , t1 0 РН 2 також виведе KB 13 в задану точку орбіти в заданий час по траєкторії 33 (там же). Вищезазначена залежність для СВП наступного за поточним ступенем з КДУ може бути спро щена таким чином: m dH mH H t . Всі коефіцієнти можуть бути визначені чисельними оптимізаційними процедурами за критерієм, наприклад, мінімуму похибки виведення. У спрощеному варіанті коефіцієнти d , , dH , H можна визначити із залежностей t Dk d k m H D Dk tk m t H Dk tk Dk tk m m m m H H t Dk dH k m H D Dk tk H m t Dk tk Dk tk , m m m m H H , Dk tk Dk tk m m m m H H Dk tk Dk tk m m m m , H H , 8 sk sk , , s t, D, i , H - функції чутли mi s вості (ФВ) кінцевих значень часу та дальності до масового секундного видатку палива поточного і наступного ступенів та до поточних значень часу і дальності в поточний час руху відповідно. ФВ в кожному циклі уточнюються для попередньо визначених програм керування. Визначених або одноразово, наприклад до старту, або уточнених на попередньому циклі наведення РН. Попередні оцінки ефективності процесу, що заявляється, проведені для трьохступеневої РН з стартовою масою біля 100т, КДУ на базі ракетних двигунів на пастоподібному паливі з діапазоном регулювання від максимального значення тяги до 10% від нього на другому та третьому ступенях, показали, що даний процес дозволяє компенсувати початкові промахи по дальності і часу при виведенні KB в точку зустрічі з орбітальною станцією в діапазонах 190км та 34с відповідно. В процесі, що заявляється, використовуються прості залежності, всі коефіцієнти можуть бути визначені заздалегідь до пуску і зберігатися у вигляді польотного завдання. Процес не потребує складних маневрів. Ефективність процесу за наведеними оцінками дуже велика. Таким чином, вирішена поставлена задача розробки процесу виведення космічного апарата ракетою-носієм на задану орбіту в задану її точку в заданий час мінімальної складності, високих точності і ефективності. Джерела інформації 1. Пат. США № 6315248 МКВ 7 В 64 G 1/40, 1/42, 1/24. Способ вывода на орбиту спутника с помощью твердотопливного ракетного двигателя // Rockwell Donald. - 501675. Заявл. 10.02.2000; Опубл. 13.11.2001. Описание изобретения 1 с // Изобретения стран мира, 2002. -Вып. 33 - № 11. С. 30-31. 2. Пат. 2254271 Росія МКВ 7 В 64 G 1/24. Способ коррекции параметров программы изменения продольного движения при терминальном управлении наведением разгонного блока на заданную орбиту // Сыров А.С, Соколов В.Н., Ежов В.В. 2003119031/11. Заявл. 2003.06.27; Опубл. 2005.02.20. Описание изобретения 3 с II Доступно: httр://www.fips.ru. 3. Пат. 2223894 Росія МКВ 7 В 64 G 1/24. Способ формирования терминального управления наведением разгонного блока на заданную орбиту // Сыров А.С, Соколов В.Н., Ежов В.В. 2002114061/11. Заявл. 2002.05.30; Опубл. 2004.02.20. Описание изобретения 3 с // Доступно: httр://www.fips.ru. де 9 57487 10 11 Комп’ютерна верстка А. Крижанівський 57487 Підписне 12 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of launching spacecraft into desired orbit
Автори англійськоюBondarenko Serhii Hryhorovych, Khorolskyi Petro Heorhiiovych
Назва патенту російськоюСпособ выведения космического аппарата ha заданную орбиту
Автори російськоюБондаренко Сергей Григорьевич, Хорольский Петр Георгиевич
МПК / Мітки
МПК: B64G 1/24
Мітки: спосіб, космічного, апарата, виведення, орбіту, задану
Код посилання
<a href="https://ua.patents.su/6-57487-sposib-vivedennya-kosmichnogo-aparata-na-zadanu-orbitu.html" target="_blank" rel="follow" title="База патентів України">Спосіб виведення космічного апарата на задану орбіту</a>
Спосіб польоту на навколоземну орбіту багаторазового повітряно-космічного апарата та багаторазовий повітряно-космічний апарат для здійснення способу
Номер патенту: 84479
Опубліковано: 27.10.2008
Автори: Левенко Олександр Сергійович, Кукушкін Володимир Іванович, Алексєєв Юрій Сергійович
МПК: B64G 1/00, F42B 15/01
Мітки: повітряно-космічний, навколоземну, спосіб, здійснення, орбіту, способу, польоту, апарата, апарат, багаторазовий, повітряно-космічного, багаторазового
Формула / Реферат:
1. Спосіб польоту на навколоземну орбіту багаторазового повітряно-космічного апарата в автоматичному режимі, що передбачає старт, вихід на балістичну траєкторію польоту, розгін і вихід на розрахункову навколоземну орбіту із забезпеченням можливості повторного та багаторазового використовування складових конструктивних елементів, що відділяються після виконання своїх функцій, який відрізняється тим, що на етапі руху повітряно-космічного...
Ракетно-космічна система і спосіб виведення корисного навантаження на робочу орбіту
Номер патенту: 89490
Опубліковано: 10.02.2010
Автори: Матвієнко Сергій Анатолійович, Матвієнко Анатолій Павлович
Мітки: навантаження, спосіб, корисного, ракетно-космічна, виведення, система, орбіту, робочу
Формула / Реферат:
1. Ракетно-космічна система, що включає засіб виведення, транспортуючу частину і вантажний модуль, обладнані системою стикування, яка відрізняється тим, що засіб виведення виконаний у вигляді щонайменше двох ракет-носіїв, транспортуюча частина виконана у вигляді щонайменше одного транспортного модуля, вантажний модуль виконаний у вигляді універсальної космічної платформи з корисним навантаженням, при цьому кожен модуль розміщений на окремій...
Спосіб виведення корисного навантаження на орбіту в космос
Номер патенту: 51485
Опубліковано: 15.11.2002
Автори: Мельничук Вячеслав Валерійович, Коваленко Борис Якович, Майданюк Дмитро Вікторович, Сідельников Леонід Павлович, Легеза Володимир Семенович, Лепескин Ігор Борисович
МПК: B64D 5/00
Мітки: космос, виведення, спосіб, навантаження, корисного, орбіту
Формула / Реферат:
1. Спосіб виведення корисного навантаження на орбіту в космос, що включає рух літака з ракетою до точки відділення ракети, виконання після досягнення заданої швидкості польоту, висоти і географічних координат маневру «гірка» і відділення ракети при досягненні необхідного кута тангажа і нульового кута атаки, рух ракети від моменту видачі команди на відділення ракети до моменту запуску двигуна, з наступнимвиходом її в площину виведення, який...
Спосіб виведення штучного супутника на геостаціонарну орбіту
Номер патенту: 46135
Опубліковано: 15.05.2002
Автор: Вагнер Алан
Мітки: штучного, супутника, геостаціонарну, спосіб, виведення, орбіту
Формула / Реферат:
1. Спосіб виведення на геостаціонарну орбіту штучного супутника, що запускається на згадану орбіту за допомогою космічного транспортного засобу, який відрізняється тим, щоа) конструктивний вузол, що складається з останнього ступеня зазначеного космічного транспортного засобу і супутника, виведеного на геостаціонарну орбіту, запускають на “орбіту-могильник",б) супутник відокремлюють від зазначеного останнього ступеня, який...
Система виведення корисного навантаження на низьку орбіту
Номер патенту: 49922
Опубліковано: 15.10.2002
Автори: Вурст Стефан Дж., Скотт Гаррі
Мітки: система, низьку, корисного, орбіту, виведення, навантаження
Формула / Реферат:
1. Система виведення корисного навантаження на низьку орбіту, що має перший та другий ступінь запуску, з яких перший ступінь виконано у вигляді літака з турбовентиляторним двигуном, оснащеного засобом для перевезення та випуску другого ступеня, яка відрізняється тим, що другий ступінь виконано у вигляді аерокосмічного апарата, що містить фюзеляж з носовою частиною, середньою частиною, де знаходиться вантажний відсік, який має кілька cтулок,...
Попередній патент: Спосіб виготовлення засобу для нанесення зображення
Наступний патент: Регульована ракетна двигунна установка на пастоподібному унітарному паливі
Випадковий патент: Спосіб лікування тромбозів