Спосіб керування асинхронним електродвигуном з фазним ротором і пристрій для його здійснення
Номер патенту: 8973
Опубліковано: 30.09.1996
Автори: Саблін Вадим Дмитрович, Чікалов Віталій Іванович, Латишенок Володимир Іванович, Пісковатськая Ольга Вікторовна, Колчев Євген Васильович
Формула / Реферат
1. Способ управления асинхронным электродвигателем с фазным ротором и включенными в его цепь регулируемым и секционированным резисторами, при котором осуществляют плавное изменение регулируемого резистора по монотонно изменяющему управляющему воздействию и при достижении этой величиной нулевого значения осуществляют ступенчатое изменение значения сопротивления секционированного резистора, отличающийся тем, что, с целью повышения надежности путем исключения пиков момента, при указанном ступенчатом изменении секционированного резистора осуществляют коррекцию управляющего воздействия путем его изменения на величину
в направлении, противоположном его изменению, где R21 - полное сопротивление фазы роторной цепи до 1-го ступенчатого изменения величины сопротивления секционированного резистора без учета дополнительного плавно изменяемого сопротивления, D R21 - сопротивление 1-й секции секционированного резистора.
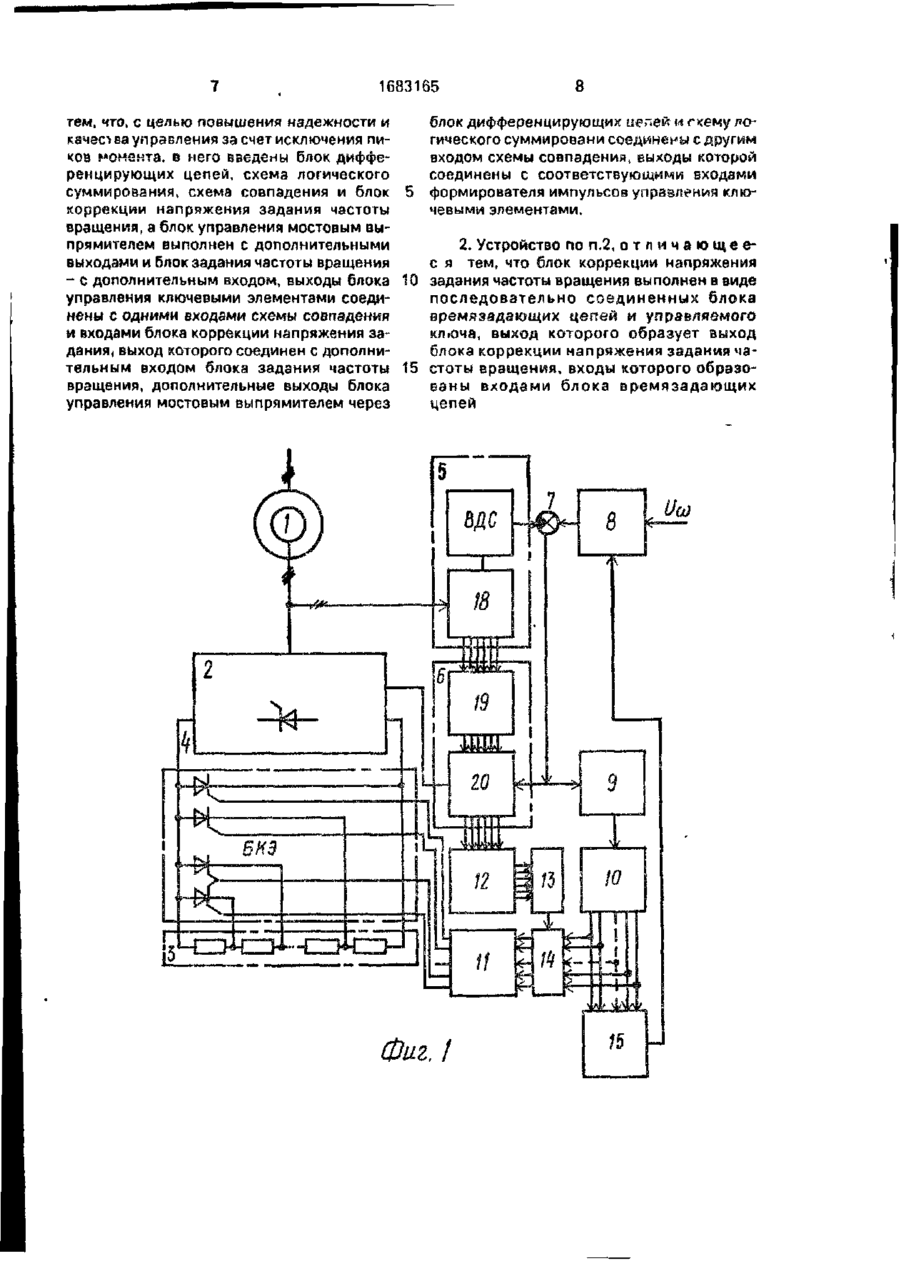
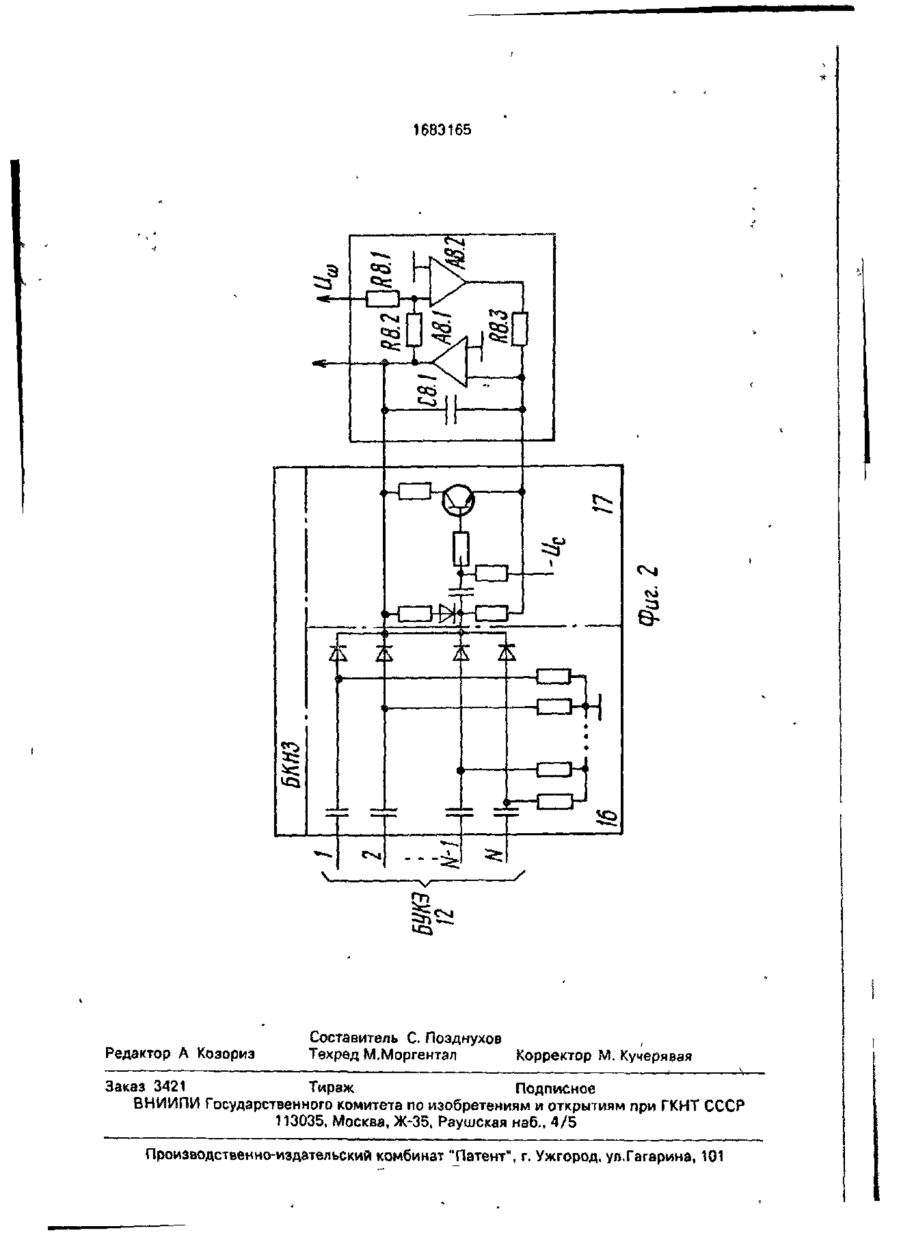
2. Устройство для управления асинхронным электродвигателем с фазным ротором, содержащее управляемый мостовой выпрямитель, соединенный силовым входом с зажимами для подключения обмотки ротора, а выходом - с резистором, секционированным N управляемыми ключевыми элементами, датчик ЭДС скольжения, с входом для подключения в цепь ротора, а выходами соединен с соответствующими опорными входами блока управления мостового выпрямителя и с информационным входом элемента сравнения, задающий вход которого подключен к выходу блока задания частоты вращения, выход элемента сравнения соединен с управляющим входом блока управления мостовым выпрямителем и входом нуль-органа, выход которого соединен с входом блока управления ключевыми элементами, выход блока управления мостовым выпрямителем соединен с входом управления мостового выпрямителя, а управляющие входы ключевых элементов подключены к соответствующим входам формирователя импульсов управления ключевыми элементами, отличающееся тем, что, с целью повышения надежности и качества управления за счет исключения пиков момента, в него введены блок дифференцирующих цепей, схема логического суммирования, схема совпадения и блок коррекции напряжения задания частоты вращения, а блок управления мостовым выпрямителем выполнен с дополнительными выходами и блок задания частоты вращения - с дополнительным входом, выходы блока управления ключевыми элементами соединены с одними входами схемы совпадения и входами блока коррекции напряжения задания, выход которого соединен с дополнительным входом блока задания частоты вращения, дополнительные выходы блока управления мостовым выпрямителем через блок дифференцирующих цепей и схему логического суммирования соединены с другим входом схемы совпадения, выходы которой соединены с соответствующими входами формирователя импульсов управления ключевыми элементами.
3. Устройство по п.2, отличающееся тем, что блок коррекции напряжения задания частоты вращения выполнен в виде последовательно соединенных блока времязадающих цепей и управляемого ключа, выход которого образует выход блока коррекции напряжения задания частоты вращения, входы которого образованы входами блока времязадающих цепей.
Текст
Изобретение относится к электротехнике и может быть использовано в электроприводах подъемно-транспортных машин, волочильных станов и других подобных про изводствениых механизмов. Целы тения является повышение надежности м качества управления. Запуск электродвигателя с фазным ротором осуществляют за счет ступенчатого и плавного регулмровзния тока ротора посредством шунтирования секций реостата т плавного изменений угла включения тиристоров управляемого выпрямителя, включенных в роторную цепь. Для достижения указанной цели при ступенчатом изменении секционированного резистора осуществляют коррекцию сигнала управления, под воздействием которого происходит запуск двигателя, изменяя его AR21 на Ур| =—о положном его изменению, где R2f - полное сопротивление фазы ротооной цепи до 1-го изменения секционированного резистора, AR21 - сопротивление 1-й секции секционированного резистора. 2 с. и 1 з.п. ф-лы, 2 ил. Изобретение относится к зяектротехнике водах подъемно-транспортных волочмпьных станов н других подобных про напряжения заданий частоты вращения Цель изобретения - повышение надежностм и качества управления за счет исключенмя пиков момента На фиг.1 приведена структурная схема устройства для управления асинхронным электродвигателем с фазным ротором; на фиг.2 - структурная схема блока коррекции тель 2, соединенный силовим входом с зажимами для подключения збмотки ротора электродвигателя 1, а выходом - с резистором 3, секционированным N чирзвлаемышл ключевыми элементами 4, датчик 5 ЭДС скольжения, блок 6 управления мостового выпрямителя, элемент 7 сравнения, блок 8 ным электродвигателем 1 с фазным ротором 1683165 задания частоты вращения, нуль-орган 9, нулевого значения осуществляют шунтироблок 10 управления ключевыми элементавание секций добавочного резис.ора, вклюми, формирователь 11 импульсов управлеченного также в цепь ротора. ния ключевыми элементами, блок 12 Одновременно с шунтированием промзводифференцирующих цепей, схему 13 логи- 5 дят ступенчатую коррекцию напряжения заческого суммирования, схему 14 совпадедзния в направлении, противоположном его ния и блок 15 коррекции напряжения изменению, с целью компенсации возмущезадания частоты вращения, ния, вносимого скачкообразным изменением сопротивления секционированного Датчик 5 ЭДС скольжения входом связан с цепью ротора электродвигателя 1, а 10 резистора за счет адекватного, но противовыходами - с соответствующими опорными пложного изменения состояния параметривходами блока 6 управления мостового выческого регулятора. прямителя и с информационным входом Устройство для управления асинхронэлемента 7 сравнения, задающий вход котоным электродвигателем с фазным ротором рого подключен к выходу блока 8 задания 15 работает следующим образом. частоты вращения. Выход элемента 7 сравНа статор неподвижного электродвиганения соединен с управляющим входом теля 1 подается напряжение питающей себлока 6 управления мостовым выпрямитети, в результате чего на фазном роторе лем и входом нуль-органа 9, выход которого появляется напряжение, которое через соединен с входом блока 10 управления 20 трансформатор 18 датчика 5 ЭДС скольжеключевыми элементами. Формирователь 11 ния поступает на входы генератора 19 пилоимпульсов управления ключевыми элеменобразного напряжения блока 6 управления тами подключен к управляющим элементам мостовым выпрямителем. На выходе гене4. Выход блока 6 управления мостовым выратора 19 формируются напряжения пилопрямителем соединен с входом управления 25 образной формы, находищеся в фазе с мостового выпрямителя 2, а дополнительнапряжением обмоток ротора, которые подные выходы блока 6 управления через блок аются в формирователь 20 импульсов, где 12 дифференцирующих цепей и схему 13 сравниваются с выходным сигналом элелогического суммирования соединены с 30 мента 7 сравнения. В момент их равенства другим входом схемы 14 совпадения. Выхоформируются импульсы, отпирающие тириды блока Юуправления ключевыми элеменсторы управляемого мостового выпрямитетами соединены с одним входом схемы 14 ля 2. Таким образом, угол управления совпадения и со входами блока 15 корректир' ".торами выпрямителя 2 пропорционации напряжения задания, выход которого 35 лен напряжению, поступающему с элемента подключен к дополнительному входу блока 7 сравнения. 8 задания частоты вращения. Выходы схемы В момент подачи напряжения на статор 14 совпадения соединены с соответствуюэлектродвигателя 1 этот угол максимален, щими входами формирователя 11 импульчто обеспечивает запертое состояние упсов управления ключевыми элементами. 40 равляемого мостового выпрямителя 2, а слеБлок 15 коррекции напряжения задания довательно, и отсутствие крутящего (фиг.2) выполнен в виде последовательно момента на валу электродвигателя. соединенных блока 16 времязадающих цеС началом монотонного изменения выпей и управляемого ключа 17, выход котороходного напряжения блока 8-задания часто- го образует выход блока 15 коррекции 45 ты вращения происходит уменьшение , напряжения задания, входы которого образо- • напряжения на выходе элемента 7 сравнеь ваны входами блока 16 времязадающих цепей. ния, что влечет за собой смещение импульСпособ управления асинхронным двисов управления тиристоров мостового гателем с фазным ротором позволяет реаливыпрямителя 2 в сторону точки естествензовать плавный пуск без рывков и качков в 50 ной коммутации, т.е. его постепенное отдиаграмме моментов в соответствии с гракрытие, и, вместе с тем, приводит к росту фиком изменения напряжения задания. тока в фазах обмотки ротора, что обеспечиПри этом полностью используются возможвает увеличение крутящего момента на ваности параметрического регулятора, осущелу. Нарастание крутящего момента ствляющего плавное изменение 55 продолжается до трогания с места ротора сопротивления в цепи ротора. При пуске электродвигателя 1, а затем происходит его благодаря монотонно изменяющемуся наразгон с темпом, определяемым блоком 8 задания частоты вращения. . пряжению задания происходит плавный рост момента двигателя за счет уменьшения Угол управления мостовым выпрямитезначения сопротивления в роторной цепи. лем 2 достигает нулевого значения когда При достижении данным сопротивлением ' напряжение на выходе элемента сравнения 1683165 7 становится равным нулю, что приводит к формированию на выходе нуль-органа 9 напряжения высокого уровня, поступающего на вход блока 10 управления ключевыми элементами. В результате на его соотве^ствующем выходе формируется сигнал отпирания очередного тиристорного ключевого элемента 4, шунтирующего соответствующую секцию резистора 3. Этот сигнал поступает на входы схемы 14 совладения и блока 15 коррекции напряжения задания, где подается непосредственно на одну из дифференцирующих цепей, входящих в состав блока 16 времязадающих цепей (фиг.2) В результате на вход управляемого ключа 17 блока коррекции напряжения задания поступаетуправляющий импульс вполне определенной длительности, что приводит к кратковременному его отпиранию, обеспечивая необходимую коррекцию выходного напряжения блока 8 задания частоты вращения за счет дозированного разряда емкости интегратора, входящего в его состав. 5 10 15 20 Изменение в результате осуществленной коррекции выходного напряжения бло- 25 ка 8 задания приводит к возрастанию напряжения на выходе элемента 7 сравнения, что влечет за собой рост угла управления тиристорами мостового выпрямителя 2. С появлением очередного управляющего 30 импульса на выходе формирователя 20, поступающего как на управляющий вход мостового выпрямителя 2, так и на блок 12 дифференцирующих цепей, на выходе последнего возникает импульс напряжения, 35 воздействующий через схему 13 логического суммирования на схему 14 совпадения, что вызывает формирование импульсов напряжения на тех ее выходах, на соответствующие входы которых поданы 40 разрешающие напряжения со стороны блока 10 управления ключевыми элементами. Эти импульсы усиливаются формирователем 11 импульсов управления и подаются на ключевые элементы 4. При этом состояние 45 ранее включенных элементов 4 не меняется, а переходит в проводящее состояние ключевой элемент, шунтирующий очередную секцию резистора 3. Благодаря осуществленной к этому мо- 50 менту коррекции выходного напряжения блока 8 задания, повлекшей за собой подзапирание мостового выпрямителя 2 (т.е. уменьшение эквивалентного сопротивления, включенного в роторную цепь), ток в 55 роторной цепи, а следовательно, и момент электродвигателя 1 будут сохранены на прежнем уровне. Таким образом, производя одновременно с шунтированием секций резистора изменение то~ей и гкему лотем, что, с целью повышения надежности и гического суммировани соединены с другим качества управления за счет исключения пивходом схемы совпадения, выходы которой ков момента, в него введены блок диффесоединены с соответствующими входами ренцирующих цепей, схема логического формирователя импульсов упразления клюсуммирования, схема совпадения и блок чевыми элементами. коррекции напряжения задания частоты вращения, а блок управления мостовым выпрямителем выполнен с дополнительными 2. Устройство по п.2, о т л и ч а ю щ е е выходами и блок задания частоты вращения с я тем, что блок коррекции напряжения - с дополнительным входом, выходы блока 10 задания частоты вращения выполнен в виде управления ключевыми элементами соедипоследовательно соединенных блока нены с одними входами схемы совпадения времязадающих цепей и управляемого и входами блока коррекции напряжения заключа, выход которого образует выход дания, выход которого соединен с дополниблока коррекции напряжения задания чательным входом блока задания частоты 15 стоты вращения, входы которого образовращения, дополнительные выходы блока ваны входами блока времязадающих управления мостовым выпрямителем через цепей 1683165 счі Редактор А Козориз Составитель С. Позднухов Техред М.Моргентал Корректор М. Кучерявая Заказ 3421 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, уя.Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюControl method for asynchronous motor with wound rotor and device to realize it
Автори англійськоюChikalov Vitalii Ivanovych, Kolchev Yevhen Vasyliovych, Piskovatska Olha Viktorivna, Latyshenok Volodymyr Ivanovych, Sablin Vadym Dmytrovych
Назва патенту російськоюСпособ управления асинхронным электродвигателем с фазным ротором и устройство для его осуществления
Автори російськоюЧикалов Виталий Иванович, Колчев Евгений Васильевич, Писковатская Ольга Викторовна, Латышенок Владимир Иванович, Саблин Вадим Дмитриевич
МПК / Мітки
МПК: H02P 25/16
Мітки: здійснення, асинхронним, пристрій, керування, ротором, спосіб, фазним, електродвигуном
Код посилання
<a href="https://ua.patents.su/6-8973-sposib-keruvannya-asinkhronnim-elektrodvigunom-z-faznim-rotorom-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування асинхронним електродвигуном з фазним ротором і пристрій для його здійснення</a>
Пристрій для пуску асинхронного двигуна з фазним ротором”
Номер патенту: 4829
Опубліковано: 28.12.1994
Автори: Калюжний Володимир Владиславович, Плугатар Олексій Петрович, Гольцев Володимир Іванович, Волков Ігор Володимирович, Спікторенко Микола Федірович, Ісаков Володимир Миколайович
МПК: H02K 17/24, H02P 21/06
Мітки: ротором, фазним, асинхронного, пристрій, пуску, двигуна
Формула / Реферат:
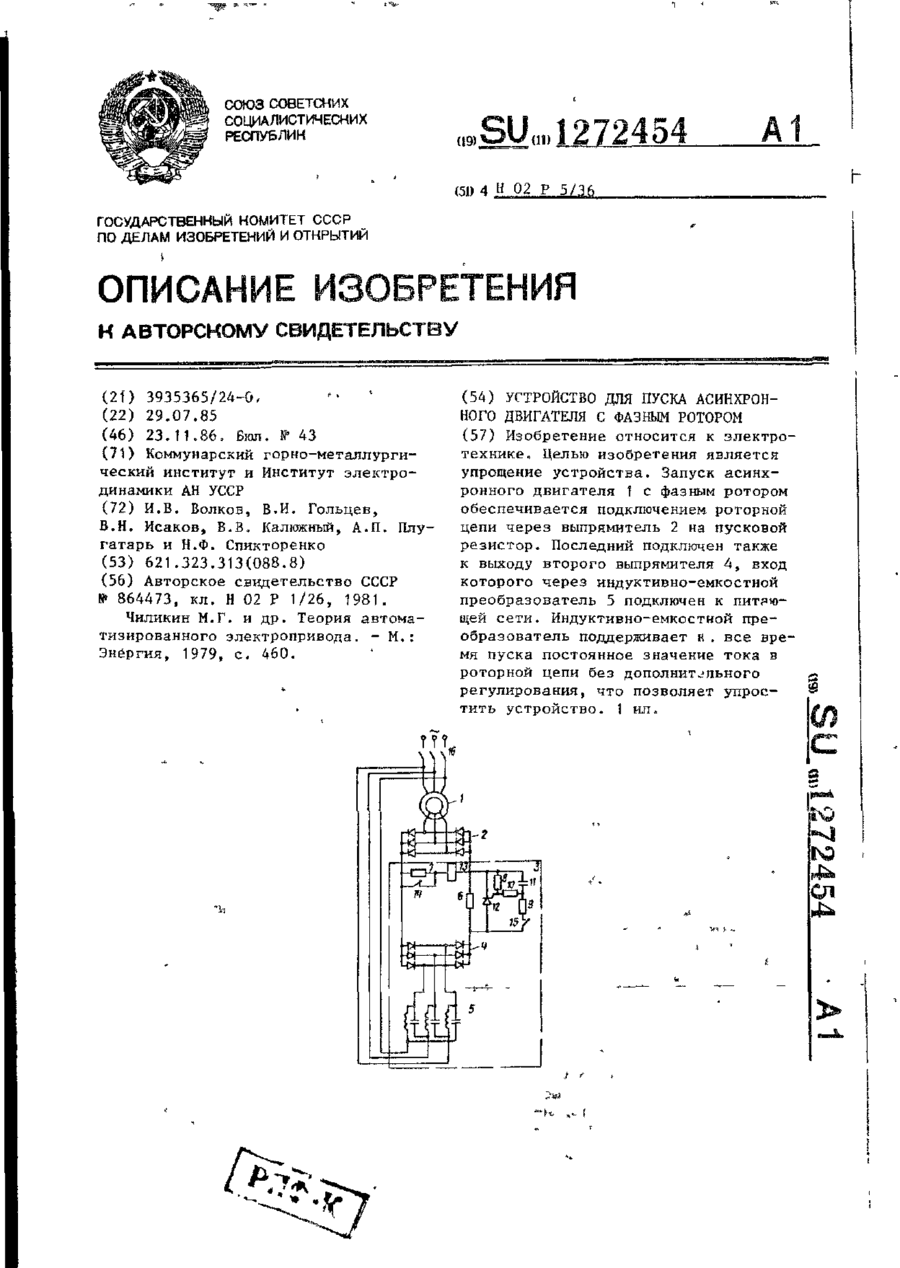
Устройство для пуска асинхронного двигателя с фазным ротором, содержащее первый трехфазный мостовой выпрямитель, блок формирования тока роторной цепи асинхронного двигателя, точки соединения анодов и катодов диодов каждой фазы первого трехфазного мостового выпрямителя снабжены зажимамидля подключения выводов роторной обмотки асинхронного двигателя, катоды и аноды диодов первого трехфазного мостового выпрямителя объединены и подключены...
Спосіб двухзонного керування частотно-регулівним електроприладом і пристрій для його здійснення
Номер патенту: 8825
Опубліковано: 30.09.1996
Автори: Шехтер Андрій Семенович, Волков Олександр Васильович
МПК: H02P 27/04
Мітки: здійснення, електроприладом, частотно-регулівним, керування, спосіб, пристрій, двухзонного
Формула / Реферат:
1. Способ'двухзонного управления частотно-регулируемым электроприводом, подключенным к сети через преобразователь частоты, составленный из выпрямителя и автономного инвертора, при котором в первом диапазоне изменения частоты инвертора регулируют напряжение выпрямителя путем регулирования угла включения вентилей выпрямителя таким образом, чтобы обеспечить заданный уровень тока в двигателе, а во втором - при изменении частоты инвертора выше...
Спосіб частотного керування асинхронним двигуном
Номер патенту: 2944
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: спосіб, керування, двигуном, асинхронним, частотного
Формула / Реферат:
Способ частотного управления асинхронным двигателем, при котором регулируют частоту и величину напряжения питания асинхронного двигателя путем широтно-импульсного модулирования постоянного напряжения питания инвертора, обеспечивая закон регулирования U=Uo+Kf, отличающийся тем, что широтно-импульсное модулирование осуществляют путем дополнительного регулирования длительности импульсов в каждой полуволне напряжения питания по следующему...
Пристрій для фазового керування 2m- фазним перетворювачем
Номер патенту: 8812
Опубліковано: 30.09.1996
Автори: Сороченко Микола Іванович, Ковтуненко Анатолій Павлович
МПК: H02M 7/00
Мітки: перетворювачем, фазового, фазним, пристрій, керування
Формула / Реферат:
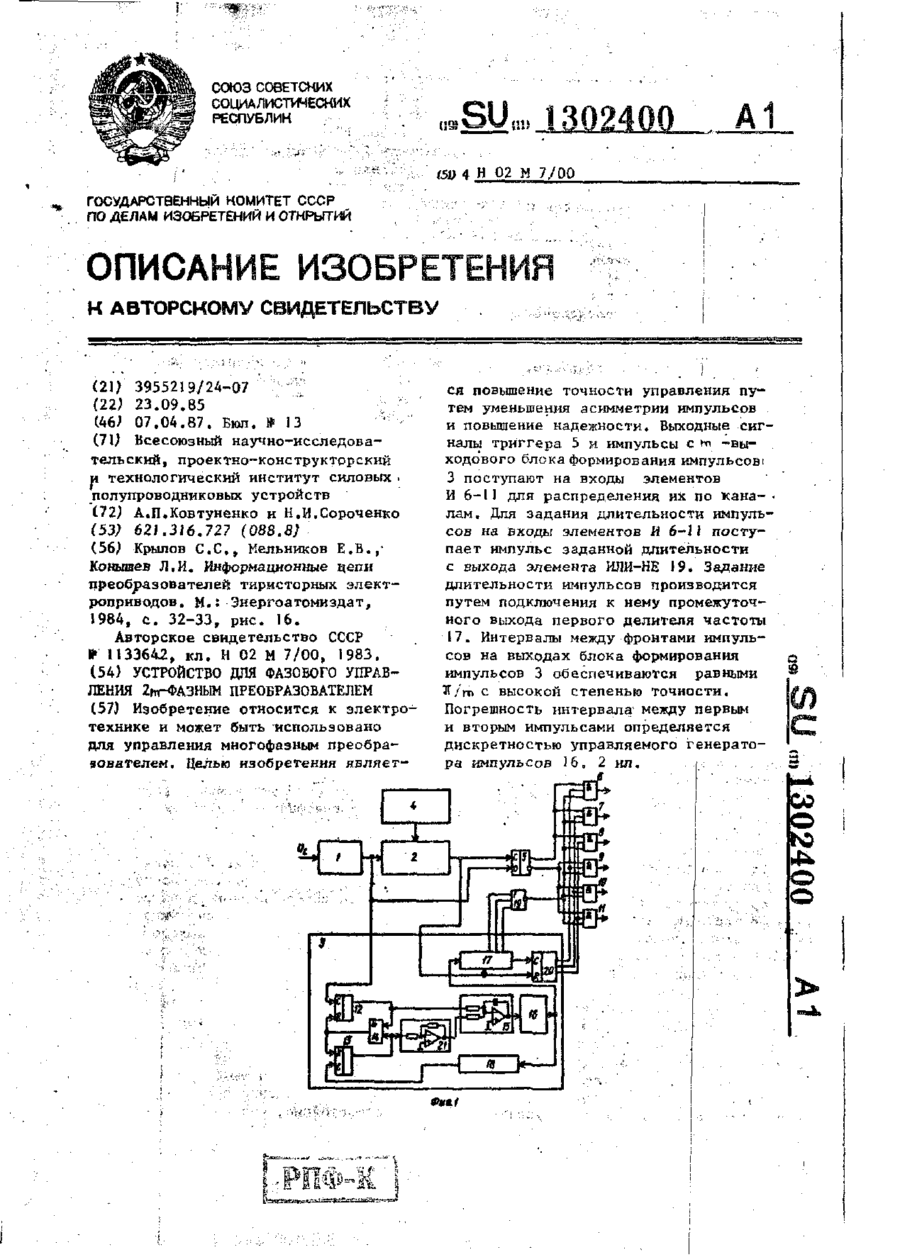
Устройство для фазового управлення 2m-фазным преобразователем, содержащее последовательно соединенные блок синхронизации, блок одноканального фазосмещения и m-ный ходовый блок формирования импульсов, причем вход блока одноканального фазосмещения предназначен для соединения с источником напряжения управления, триггер, синхронизирующий вход которого соединен с выходом блока одноканального фазосмещения, а информационный - с выходом блока...
Пристрій для управління реверсивним асинхронним електродвигуном
Номер патенту: 381
Опубліковано: 30.04.1993
Автор: Дмитренко Леонід Петрович
МПК: H02P 1/26
Мітки: реверсивним, управління, електродвигуном, асинхронним, пристрій
Формула / Реферат:
Формула изобретенияУстройство для управления реверсивным асинхронным электродвигателем, содержащее контакторы "Вперед" и "Назад", катушки которых одними выводами объединены и предназначены для подключения к одной из фаз источника питания, другие выводы каждой из катушек контакторов "Вперед" и "Назад" соединены соответственно с одними выводами размыкающих контактов противоположного контактора,...
Попередній патент: Спосіб очистки вод в каналах господарсько-питного та технічного водопостачання від забруднюючих речовин і пристрій для його здійснення
Наступний патент: Пневмогідравлічний насос-мультіплікатор
Випадковий патент: Спосіб стабілізації прискорюючої напруги електростатичного прискорювача