Спосіб оптимізації виявлення сигналів, які маскуються білим шумом
Формула / Реферат
1. Спосіб оптимізації виявлення сигналів, що маскуються білим шумом, що полягає в обробці суміші сигналу і шуму узгодженим з сигналом лінійним фільтром (УФ) і порівнянні вихідного коливання УФ з порогом, який відрізняється тим, що вихідне коливання УФ дискретизують, з отриманих вибірок формують тестове коливання, при цьому забезпечують виконання умови збереження в ньому інформації про сам сигнал і його пікове значення при будь-якому положенні сигналу на тимчасовій осі і умови максимально можливого послаблення лінійної залежності значень початкової і формованої шумових функцій, тобто їх взаємної кореляції, сформоване тестове коливання поєднують в часі із заздалегідь обмеженим знизу на нульовому рівні вихідним коливанням УФ, перемножують їх і інтегрують, в результаті отримують коливання, що є функцією взаємної кореляції, яке подають на вхід порогового пристрою.
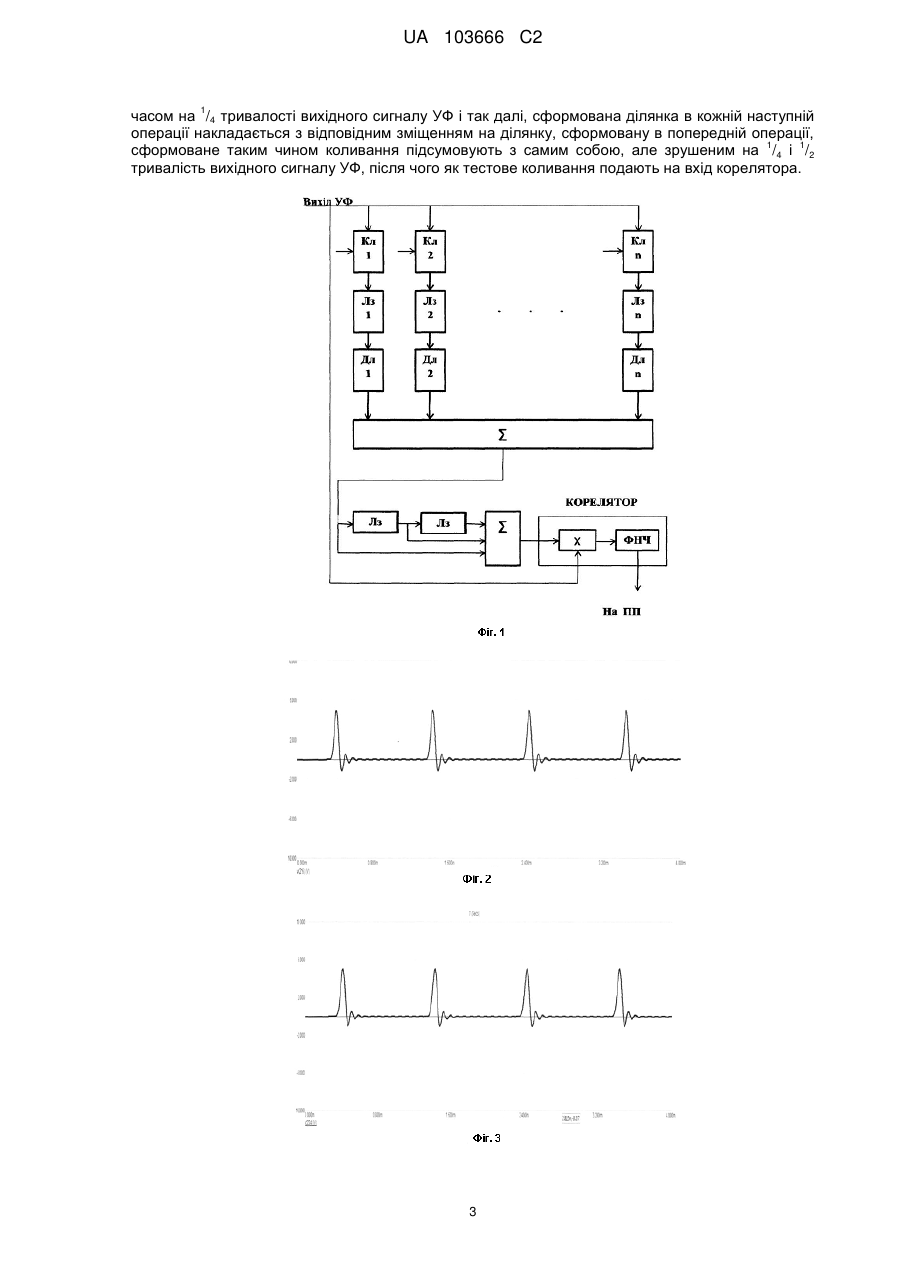
2. Спосіб оптимізації виявлення сигналів за п. 1, який відрізняється тим, що вихідне коливання УФ дискретизують на ділянці, рівній тривалості вихідного сигналу УФ, з моменту його появи на вході пристрою обробки, крок дискретизації вибирають в 5-10 разів меншим періоду частоти вищої гармоніки спектра сигналу, а тривалість вибірок - менше кроку дискретизації, отримані вибірки (2n вибірок) розбивають на дві рівних по кількості групи, непарні вибірки першої групи з 1-ою по (n-1)-у затримують на час, рівний тривалості вихідного сигналу УФ, а парні вибірки другої групи затримують кожну на свій час і встановлюють між непарними вибірками першої групи, таким чином, що, між 1-ою і 3-ою вибіркою першої групи встановлюють (2n-2)-у вибірку, яка належить до другої групи, між 3-ою і 5-ою встановлюють (2n-4)-у вибірку і так далі, одночасно виробляють послаблення по напрузі кожної вибірки відповідно до тимчасової структури вихідного сигналу УФ, процес повторюють над наступною ділянкою, зрушеною за часом на 1/4 тривалості вихідного сигналу УФ і так далі, сформована ділянка в кожній наступній операції накладається з відповідним зміщенням на ділянку, сформовану в попередній операції, сформоване таким чином коливання підсумовують з самим собою, але зрушеним на 1/4 і 1/2 тривалість вихідного сигналу УФ, після чого як тестове коливання подають на вхід корелятора.
Текст
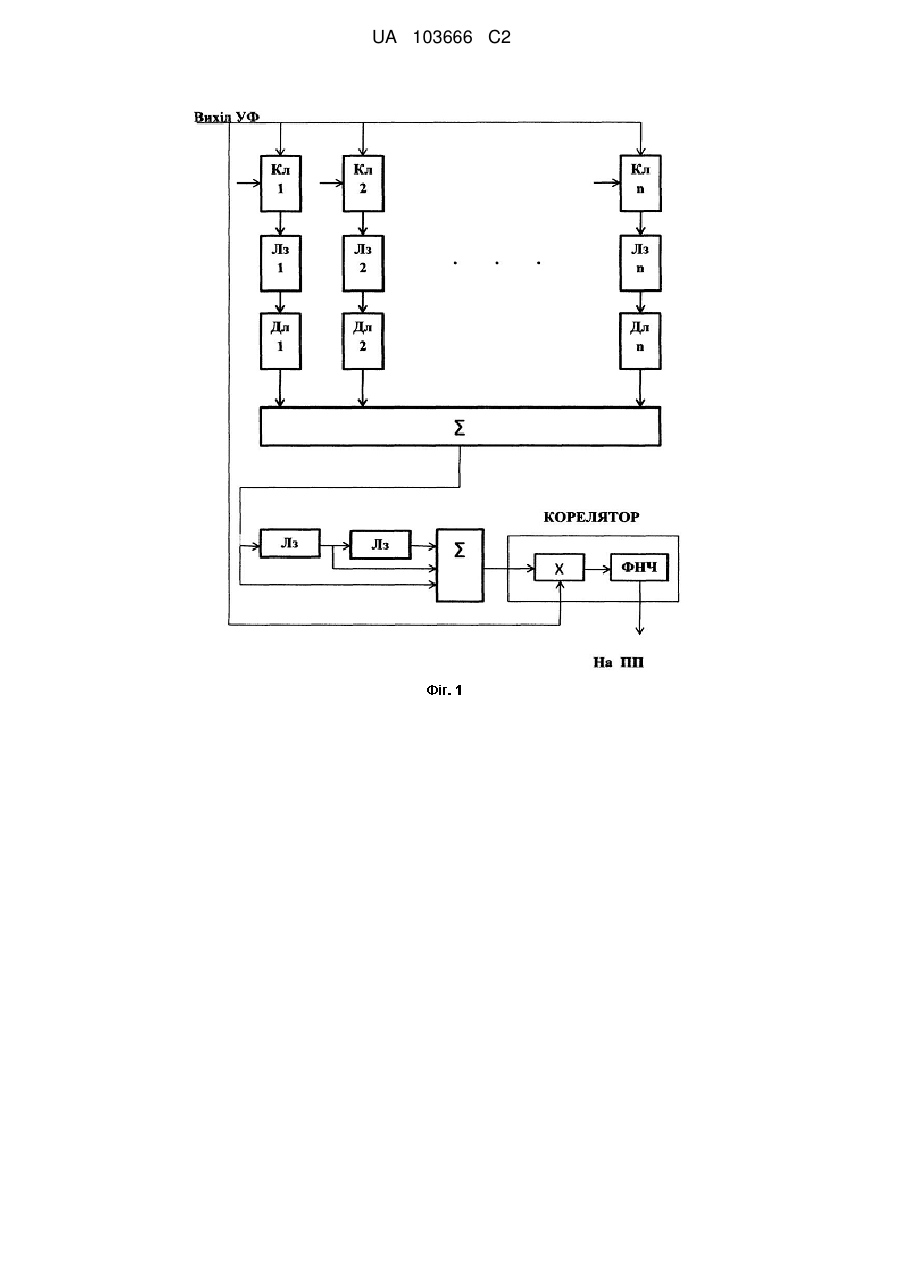
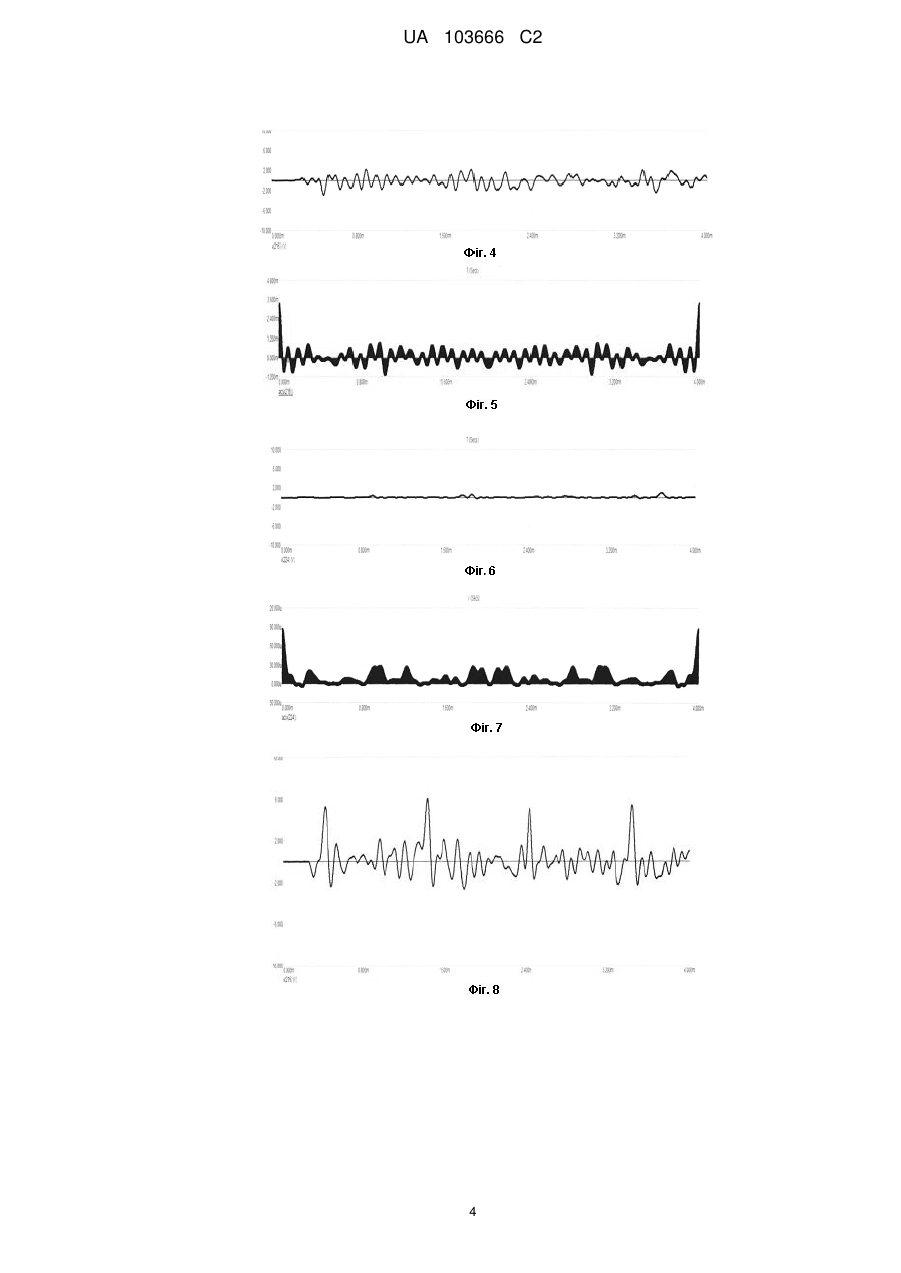
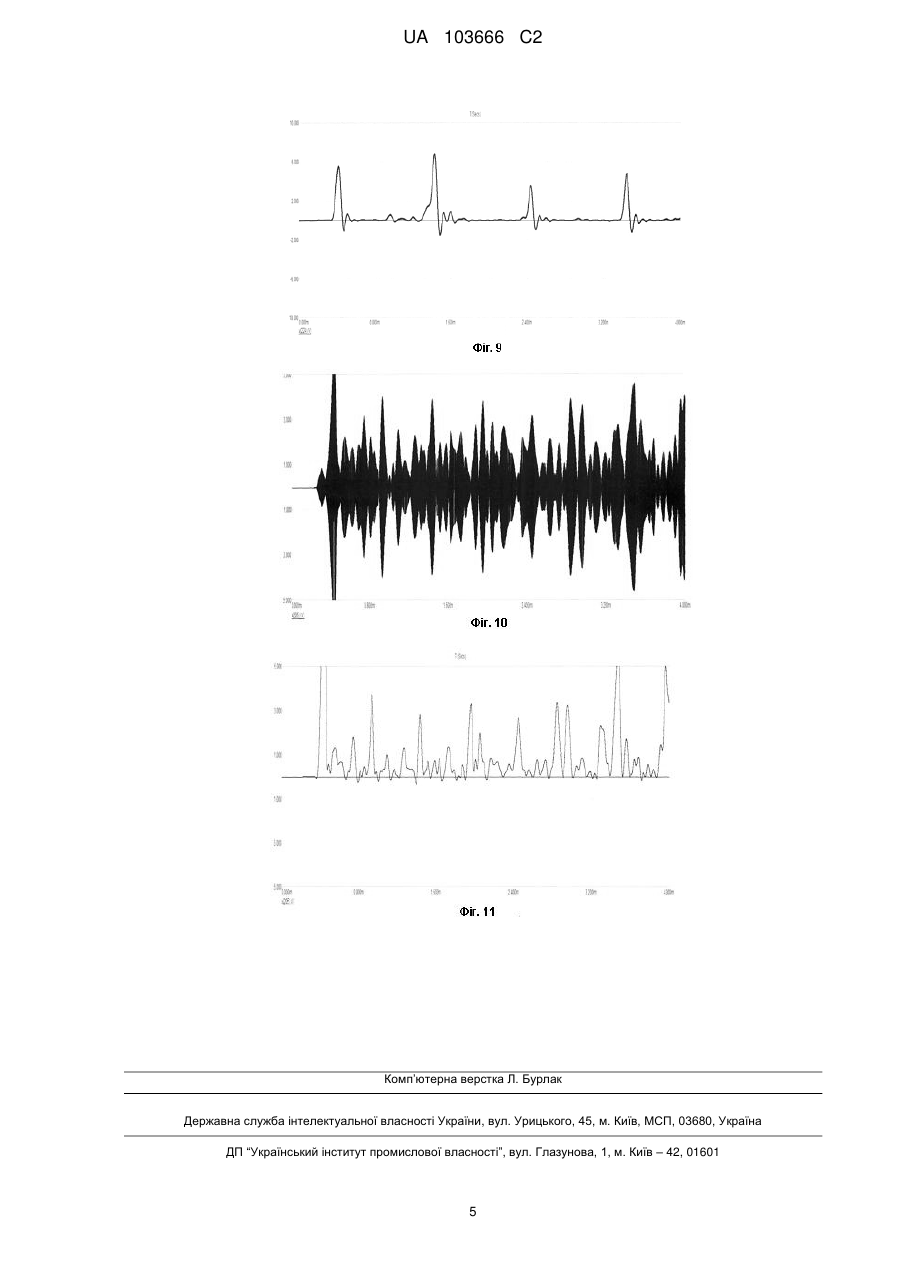
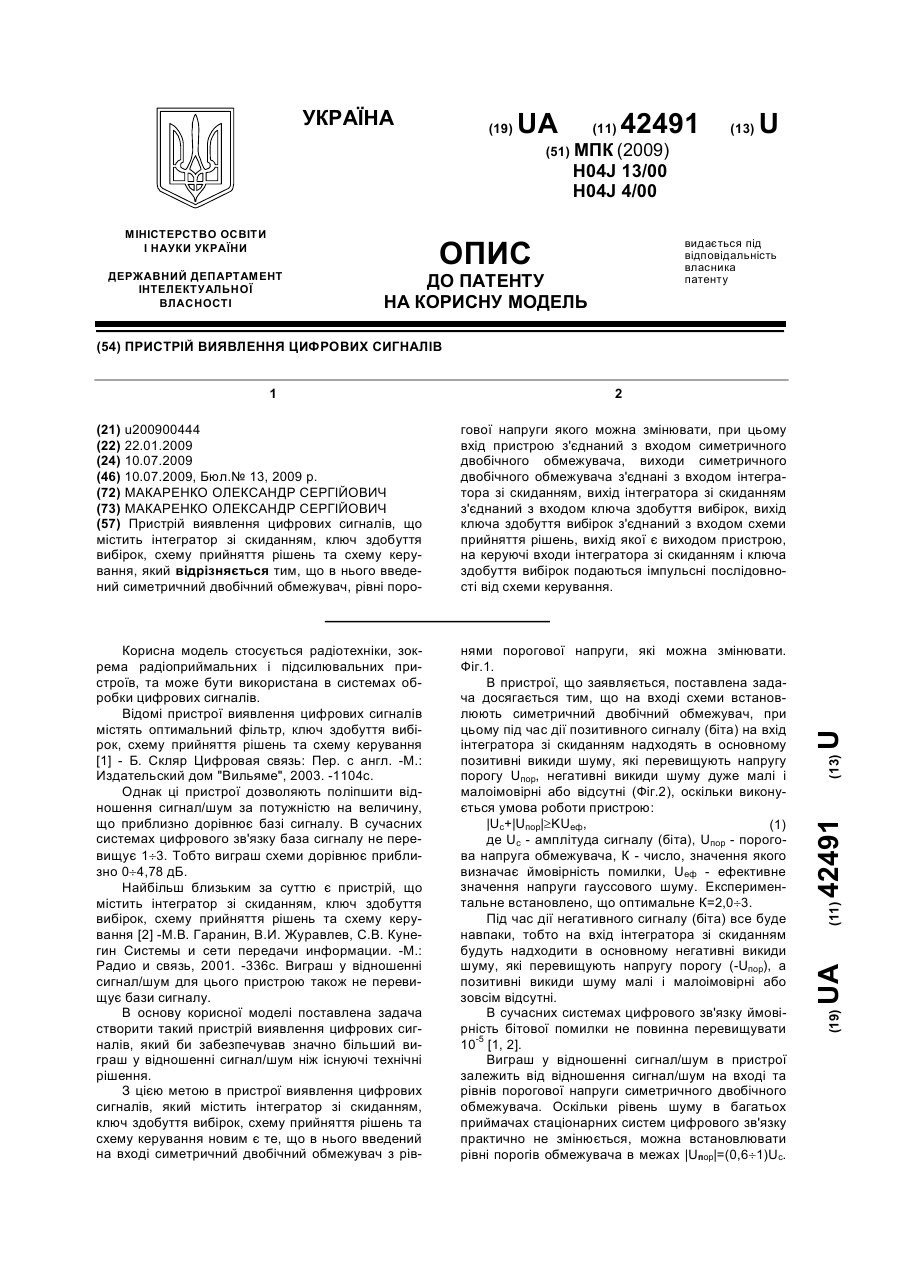
Реферат: Винахід належить до області радіозв'язку та радіолокації. Спосіб оптимізації виявлення сигналів, що маскуються білим шумом, полягає в заміні вихідного коливання узгодженого фільтра, що надходить на пороговий пристрій, на коливання, що є функцією взаємної кореляції самого вихідного коливання узгодженого фільтра і отриманого з нього штучним шляхом тестового коливання, яке формують з вибірок, отриманих в результаті дискретизації вихідного коливання узгодженого фільтра, при цьому домагаються збереження в нім інформації про сигнал і його пікове значення при будь-якому положенні сигналу на тимчасовій осі і максимально можливого послаблення лінійної залежності значень початкової і формованої шумових функцій, тобто їх взаємної кореляції, перемножують та інтегрують дані сигнали. Технічним результатом, що досягається даним винаходом, є оптимізація виявлення сигналів, за рахунок збільшення відношення сигнал-шум за рахунок використання відмінності форм сигналу і шумової функції у вихідному коливанні узгоджуючого фільтра. UA 103666 C2 (12) UA 103666 C2 UA 103666 C2 5 Винахід стосується галузей техніки, в яких передача інформації здійснюється за допомогою радіосигналів в умовах наявності перешкод, переважно винахід може використовуватися в радіолокації і радіозв'язку. Відомий спосіб обробки сигналів, що полягає в здійсненні в приймачі операції обчислення кореляційного інтеграла виду: q 10 15 20 25 30 35 40 45 50 55 2 T ut st dt N0 0 , де N0 - спектральна щільність потужності шуму; T - тривалість сигналу; ut - прийняте коливання; st - корисний сигнал. Ця операція реалізується або власне корелятором (кореляційний приймач), або лінійним фільтром, із спеціально підібраними амплітудно-частотною (АЧХ) і імпульсною характеристиками. Такий фільтр носить назву узгодженого фільтра (УФ), а обробка з його застосуванням - узгодженою фільтрацією. У разі обробки сигналу, що маскується білим шумом гауса, на виході узгодженого фільтра забезпечується максимально можливе для цього випадку відношення сигналу до шуму (ВСШ). Проте, узгоджений фільтр, забезпечуючи максимальне ВСШ, не стирає при цьому усіх відмінностей між сигналом і шумовою функцією у своєму вихідному коливанні. Відмітною ознакою сигналу, що залишилася, у вихідній суміші УФ є його форма. Задачею цього винаходу є оптимізація виявлення сигналів, що виражається в додатковому збільшенні відношення сигналу до шуму за рахунок використання відмінності форм сигналу і шумової функції у вихідному коливанні УФ. Поставлену задачу досягають тим, що вихідне коливання узгодженого фільтра, що надходить на пороговий пристрій, замінюють коливанням, що є функцією взаємної кореляції самого вихідного коливання узгодженого фільтра і отриманого з нього штучним шляхом так званого тестового коливання. Тестове коливання формують таким чином. Вихідне коливання УФ дискретизують. З отриманих вибірок із затримкою на час, рівний тривалості вихідного сигналу узгодженого фільтра, формують нове коливання, що є, як і початкове, аддитивною сумішшю шумової функції і сигналу. При формуванні цього коливання задаються (1) умовою збереження в нім інформації про сигнал і його пікове значення при будьякому положенні сигналу на тимчасовій осі і (2) умовою максимально можливого послаблення лінійної залежності значень початкової і формованої шумових функцій, тобто послаблення їх взаємної кореляції, Сформоване коливання і вихідне коливання УФ поєднують за часом, тобто компенсують час, витрачений на процес формування. В результаті сигнал у вихідному коливанні СФ і він же, перетворений, але збережений в тестовому коливанні, виявляються поєднаними в часі. Обидва коливання перемножують і інтегрують. В результаті отримують коливання, що є функцією взаємної кореляції вихідного коливання СФ і штучно сформованого з нього тестового коливання. Це коливання матиме максимуми в момент присутності сигналу і в моменти найбільшої схожості форми вихідного коливання УФ з формою сформованого коливання. При формуванні тестового коливання, що задовольняє пред'явленим до нього вимогам, враховують, що вихідна суміш УФ залишається аддитивною, а вихідний сигнал симетричний відносно свого максимуму. Вихідне коливання УФ дискретизують з моменту його появи на вході пристрою обробки на ділянці, рівній тривалості вихідного сигналу УФ. Крок дискретизації вибирають в 5-10 разів меншим періоду частоти вищої гармоніки спектра сигналу, а тривалість вибірок - менше кроку дискретизації. Отримані вибірки (2n вибірок) умовно розбивають на дві рівні по кількості групи (по n вибірок в кожній групі). Непарні (по номеру) вибірки першої групи з 1-ою по (n-1)-у затримують на час, рівний тривалості вихідного сигналу УФ, а парні вибірки другої групи затримують кожну на свій час і встановлюють між непарними вибірками першої групи. Так, між 1-ою і 3-ою вибіркою першої групи встановлюють (2n-2)-у вибірку, що належить до другої групи, між 3-ою і 5-ою встановлюють (2n-4)-у вибірку і так далі. Одночасно виробляють послаблення кожної вибірки відповідно до тимчасової структури вихідного сигналу УФ. В результаті за наявності на ділянці вихідного коливання УФ сигналу без шуму буде штучно сформована його промодульована по напрузі перша половина. Описану вище операцію над першою ділянкою 1 вихідного коливання УФ повторюють над наступною ділянкою, зрушеною за часом на /4 тривалості вихідного сигналу УФ і так далі. Сформована ділянка в кожній наступній операції накладається з відповідним зміщенням на сформовану ділянку в попередній операції. 1 UA 103666 C2 1 5 10 15 20 25 30 35 1 Сформоване таким чином коливання підсумовують з самим собою, але зрушеним на /4 і /2 тривалість вихідного сигналу УФ, після чого подають на вхід корелятора. На другий вхід корелятора подають вихідне коливання УФ, затримане на час тривалості вихідного сигналу УФ і обмежене знизу на нульовому рівні. Результатом обробки є вихідне коливання корелятора, в якому досягнуте на виході УФ відношення сигналу до шуму по потужності буде збільшено у декілька разів. Наприклад, при обробці суміші прямокутного відеоімпульса і шуму відношення сигналу до шуму за результатами моделювання збільшувалося в середньому у вісім разів. Структурна схема пристрою обробки будь-якого сигналу (радіо або відео) матиме у своєму складі (Фіг. 1) пристрій дискретизації і формування (ПДФ) і корелятор. Пристрій дискретизації і формування повинен складатися з n паралельних ланцюжків (по кількості вибірок, потрібних для формування половини вихідного сигналу УФ), на входи яких одночасно подається вихідне коливання УФ. Кожен ланцюжок має у своєму складі послідовно сполучені ключ, лінію затримки і дільника напруги. Управління ключами здійснює синхронізатор, забезпечуючи послідовне короткочасне відкривання ключа і, тим самим, отримання чергової вибірки. Лінії затримки визначають місце відповідної вибірки у формованому коливанні, а дільників напруги - її амплітуду. Усі ланцюжки об'єднані суматором напруги на n входів, з виходу якого сформоване коливання надходить на ланцюг, що складається з ліній затримки з відведеннями і суматора напруги на 3 входи. Вихідне коливання останнього надходить на один вхід помножувача напруги, а на другий вхід надходить вихідне коливання узгодженого фільтра, затримане на час, рівний тривалості вихідного сигналу, і що пройшло обмежувач напруги з нижнім рівнем обмеження, рівним нулю. Функцію інтегратора в кореляторі виконує фільтр нижніх частот (ФНЧ). Вихідне коливання ФНЧ, що є функцією взаємної кореляції вихідного коливання УФ і сформованого з нього тестового коливання, подається на пороговий пристрій. Результати моделювання процесу обробки прямокутного відеоімпульса відображені на Фіг. 2,…, Фіг. 9. Фіг. 2 відображує вихідне коливання УФ за відсутності шуму, а Фіг. 3 - результат його обробки. Фігури Фіг. 4,…, Фіг. 7 демонструють шум і його автокореляційну функцію на виході УФ (Фіг. 4 і Фіг. 5), а Фіг. 6 і Фіг. 7 показують шум і його автокореляційну функцію на виході пристрою обробки. Результат обробки суміші сигналу і шуму демонструються Фіг. 8 (вихідне коливання СФ) і Фіг. 9 (вихідне коливання пристрою обробки). Фіг. 10 і Фіг. 11 відображують результат обробки суміші прямокутного радіоімпульсу і білого шуму. Обробка, як відеосигналу, так і радіосигналу здійснювалася однією і тією ж схемою, що свідчить про її універсальність. При реалізації в РЛС дискретної обробки сигналів для оптимізації виявлення сигналів до складу приймача потрібно буде ввести пристрій з вказаними вище елементами, а при реалізації цифрової обробки буде потрібно тільки доопрацювання алгоритму центрального обчислювача РЛС. ФОРМУЛА ВИНАХОДУ 40 45 50 55 60 1. Спосіб оптимізації виявлення сигналів, що маскуються білим шумом, що полягає в обробці суміші сигналу і шуму узгодженим з сигналом лінійним фільтром (УФ) і порівнянні вихідного коливання УФ з порогом, який відрізняється тим, що вихідне коливання УФ дискретизують, з отриманих вибірок формують тестове коливання, при цьому забезпечують виконання умови збереження в ньому інформації про сам сигнал і його пікове значення при будь-якому положенні сигналу на тимчасовій осі і умови максимально можливого послаблення лінійної залежності значень початкової і формованої шумових функцій, тобто їх взаємної кореляції, сформоване тестове коливання поєднують в часі із заздалегідь обмеженим знизу на нульовому рівні вихідним коливанням УФ, перемножують їх і інтегрують, в результаті отримують коливання, що є функцією взаємної кореляції, яке подають на вхід порогового пристрою. 2. Спосіб оптимізації виявлення сигналів за п. 1, який відрізняється тим, що вихідне коливання УФ дискретизують на ділянці, рівній тривалості вихідного сигналу УФ, з моменту його появи на вході пристрою обробки, крок дискретизації вибирають в 5-10 разів меншим періоду частоти вищої гармоніки спектра сигналу, а тривалість вибірок - менше кроку дискретизації, отримані вибірки (2n вибірок) розбивають на дві рівних по кількості групи, непарні вибірки першої групи з 1-ою по (n-1)-у затримують на час, рівний тривалості вихідного сигналу УФ, а парні вибірки другої групи затримують кожну на свій час і встановлюють між непарними вибірками першої групи, таким чином, що між 1-ою і 3-ою вибіркою першої групи встановлюють (2n-2)-у вибірку, яка належить до другої групи, між 3-ою і 5-ою встановлюють (2n-4)-у вибірку і так далі, одночасно виробляють послаблення по напрузі кожної вибірки відповідно до тимчасової структури вихідного сигналу УФ, процес повторюють над наступною ділянкою, зрушеною за 2 UA 103666 C2 1 часом на /4 тривалості вихідного сигналу УФ і так далі, сформована ділянка в кожній наступній операції накладається з відповідним зміщенням на ділянку, сформовану в попередній операції, 1 1 сформоване таким чином коливання підсумовують з самим собою, але зрушеним на /4 і /2 тривалість вихідного сигналу УФ, після чого як тестове коливання подають на вхід корелятора. 3 UA 103666 C2 4 UA 103666 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюHarbuzov Volodymyr Oleksiiovych
Автори російськоюГарбузов Владимир Алексеевич
МПК / Мітки
МПК: G01S 13/00, G01S 13/02, G01S 13/10, G01S 7/28
Мітки: білим, оптимізації, виявлення, шумом, маскуються, сигналів, спосіб
Код посилання
<a href="https://ua.patents.su/7-103666-sposib-optimizaci-viyavlennya-signaliv-yaki-maskuyutsya-bilim-shumom.html" target="_blank" rel="follow" title="База патентів України">Спосіб оптимізації виявлення сигналів, які маскуються білим шумом</a>
Пристрій виявлення цифрових сигналів
Номер патенту: 42491
Опубліковано: 10.07.2009
Автор: Макаренко Олександр Сергійович
МПК: H04J 13/00, H04J 4/00
Мітки: виявлення, пристрій, сигналів, цифрових
Формула / Реферат:
Пристрій виявлення цифрових сигналів, що містить інтегратор зі скиданням, ключ здобуття вибірок, схему прийняття рішень та схему керування, який відрізняється тим, що в нього введений симетричний двобічний обмежувач, рівні порогової напруги якого можна змінювати, при цьому вхід пристрою з'єднаний з входом симетричного двобічного обмежувача, виходи симетричного двобічного обмежувача з'єднані з входом інтегратора зі скиданням, вихід інтегратора...
Пристрій виявлення косинусоїдальних цифрових і радіолокаційних сигналів
Номер патенту: 75231
Опубліковано: 26.11.2012
Автор: Макаренко Олександр Сергійович
МПК: G01S 7/285
Мітки: виявлення, сигналів, радіолокаційних, цифрових, косинусоїдальних, пристрій
Формула / Реферат:
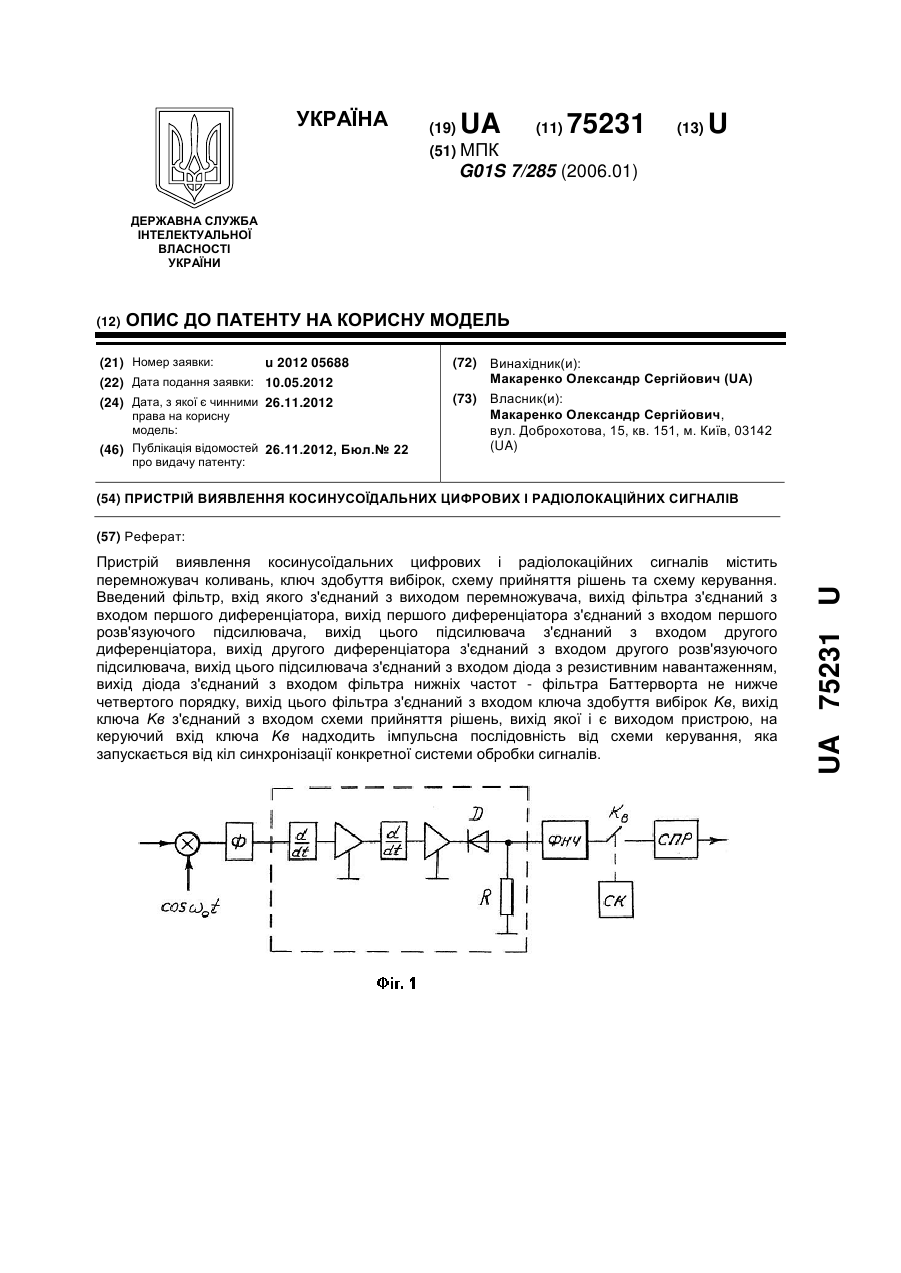
Пристрій виявлення косинусоїдальних цифрових і радіолокаційних сигналів, що містить перемножувач коливань, ключ здобуття вибірок, схему прийняття рішень та схему керування, який відрізняється тим, що в нього введений фільтр, вхід якого з'єднаний з виходом перемножувача, вихід фільтра з'єднаний з входом першого диференціатора, вихід першого диференціатора з'єднаний з входом першого розв'язуючого підсилювача, вихід цього підсилювача з'єднаний...
Пристрій виявлення косинусоїдальних цифрових і радіолокаційних сигналів
Номер патенту: 102040
Опубліковано: 27.05.2013
Автор: Макаренко Олександр Сергійович
МПК: G01S 7/285, H04B 1/10
Мітки: пристрій, виявлення, цифрових, косинусоїдальних, сигналів, радіолокаційних
Формула / Реферат:
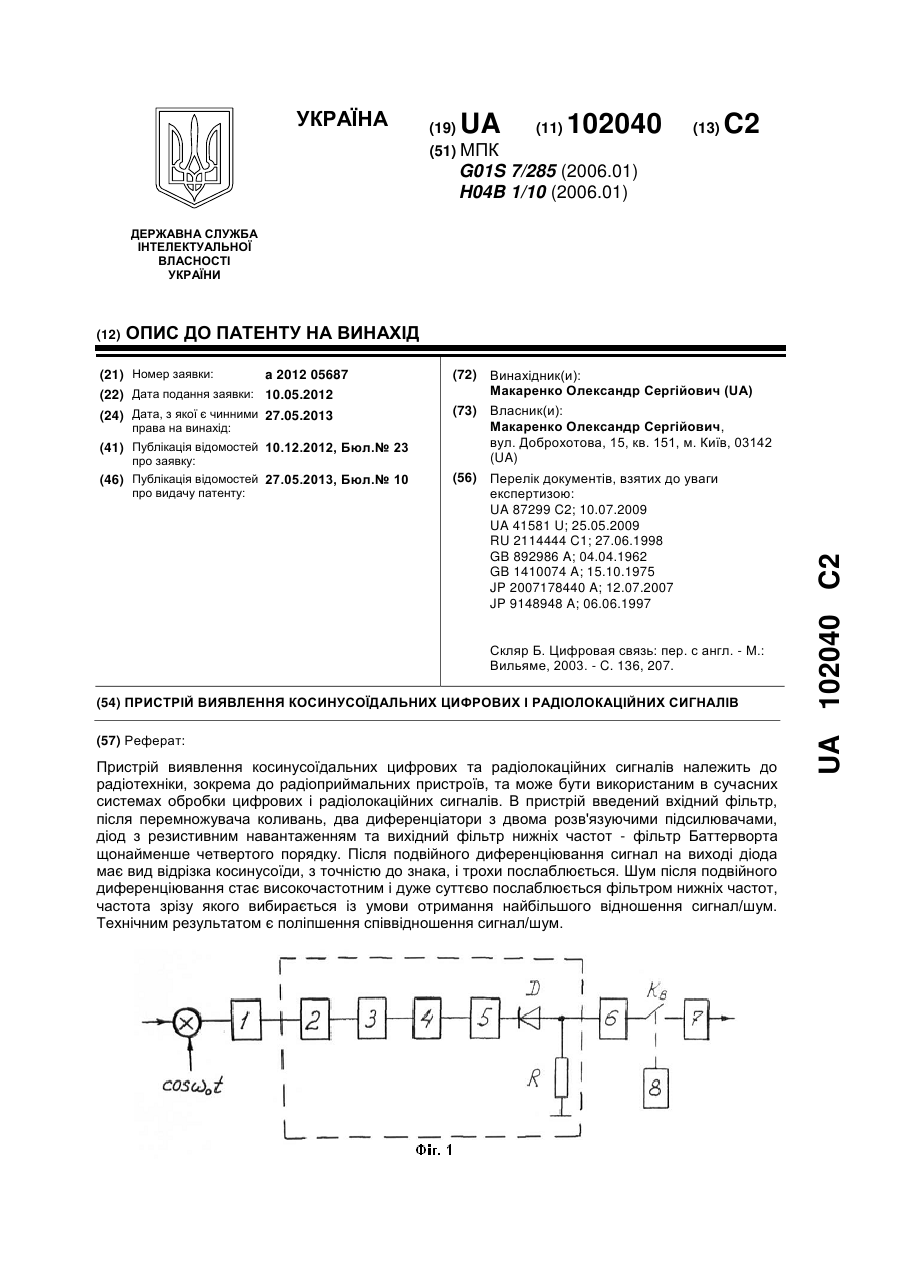
Пристрій виявлення косинусоїдальних цифрових і радіолокаційних сигналів, що містить перемножувач коливань, ключ одержання вибірок, схему прийняття рішень та схему керування, який відрізняється тим, що в нього додатково введено фільтр, блок обробки, який містить два диференціатори з двома розв'язуючими підсилювачами, діод з резистивним навантаженням та фільтр нижніх частот, який являє собою фільтр Баттерворта щонайменше четвертого порядку,...
Спосіб виявлення і локалізації акустичних сигналів протікання підземних трубопроводів
Номер патенту: 79957
Опубліковано: 10.08.2007
Автор: Чернега Віктор Степанович
Мітки: спосіб, трубопроводів, виявлення, протікання, локалізації, підземних, сигналів, акустичних
Формула / Реферат:
Спосіб виявлення і локалізації акустичних сигналів протікання підземних трубопроводів, що включає перетворення механічних коливань грунту в електричний сигнал, його підсилення, накопичення відліків сигналу і визначення в просторі місцеположення точки над трасою трубопроводу за максимальним значенням рівня сигналу, який відрізняється тим, що проводять обчислення дійсної і уявної частин спектра реалізації сигналу з перешкодою, роздільне їх...
Пристрій для виявлення і локалізації акустичних сигналів протікання підземних трубопроводів
Номер патенту: 79956
Опубліковано: 10.08.2007
Автор: Чернега Віктор Степанович
Мітки: пристрій, підземних, сигналів, виявлення, протікання, трубопроводів, локалізації, акустичних
Формула / Реферат:
Пристрій для виявлення і локалізації акустичних сигналів протікання підземних трубопроводів, що містить послідовно з'єднані чутливий елемент з підсилювачем, пороговий елемент, блок керування дисплейним індикатором і дисплейний індикатор, який відрізняється тим, що в пристрій введені блок обчислення дійсної частини і блок обчислення уявної частини спектра сигналу з шумом, входи яких об'єднані і підключені до виходу підсилювача, до виходів...
Попередній патент: Лікування фарингіту, у тому числі фарингомікозу та атрофічного фарингіту методом лазеротерапії
Наступний патент: Предмет одягу одноразового використання
Випадковий патент: Спосіб відновлення пошкодженої структури волосся за індріксоном-чакієм