Спосіб підвищення розрізненості кольорового зображення цифрового аерокосмічного знімка
Номер патенту: 107047
Опубліковано: 10.11.2014
Автори: Донець Володимир Володимирович, Станкевич Сергій Арсенійович, Бурачек Всеволод Германович
Формула / Реферат
Спосіб підвищення розрізненості кольорового зображення цифрового аерокосмічного знімку, що базується на зсуві оптичної осі кольорової цифрової камери і виконанні експозиції в заданих положеннях осі з подальшою обробкою отриманих даних, який відрізняється тим, що зсув оптичної осі виконують по П-подібній траєкторії в напрямку рядків і стовпців з експозиціями в вершинах отриманих траєкторій незамкнутого чотирикутника, сторони якого відповідають кутовим розмірам сторін прямокутника піксела ПЗЗ-матриці, при цьому, використовуючи дані по рядках і стовпцях отриманих чотирьох зображень об'єкта кольорової ПЗЗ-матриці, будують нові віртуальні однокольорові рядки та стовпці та формують з них окремі віртуальні однокольорові матриці за числом основних кольорів блока пікселів ПЗЗ-матриці; після формування віртуальних однокольорових матриць виконують субпіксельні зсуви оптичної осі цифрової камери в напрямку рядків та стовпців на n величин розмірів субпікселів та на основі отриманих даних будують субпіксельні віртуальні рядки та стовпці і потім віртуальні однокольорові субпіксельні матриці за числом кольорів пікселів основної матриці.
Текст
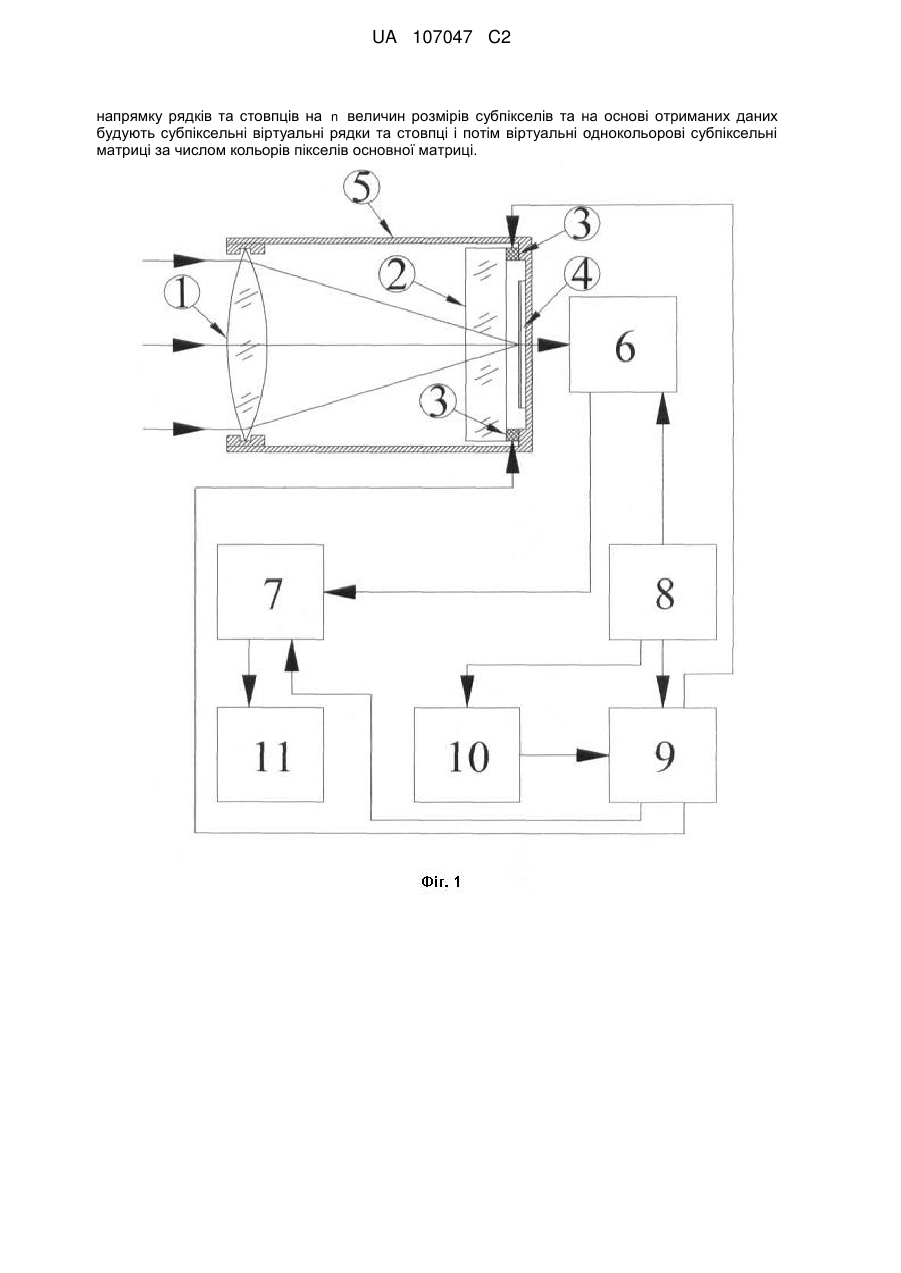
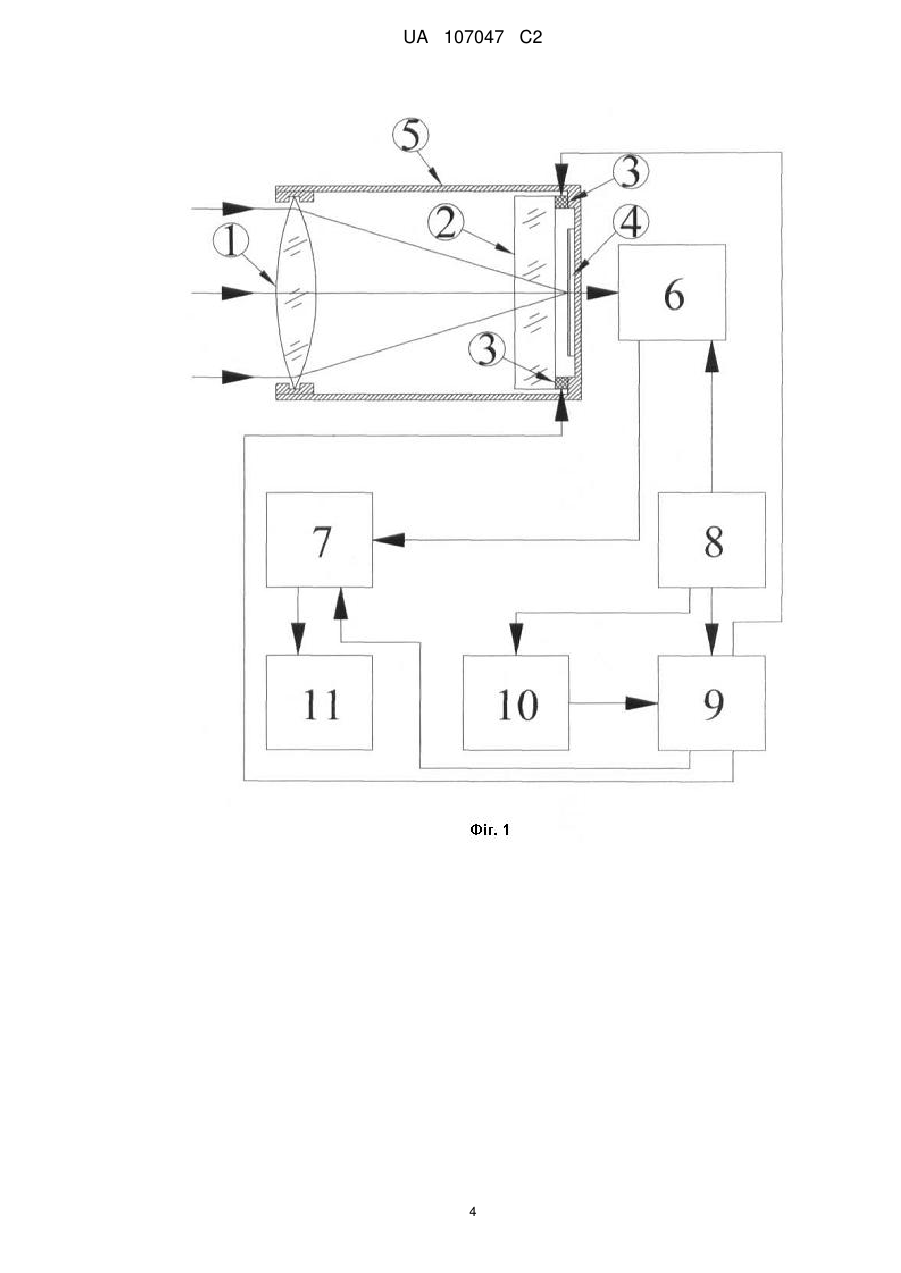
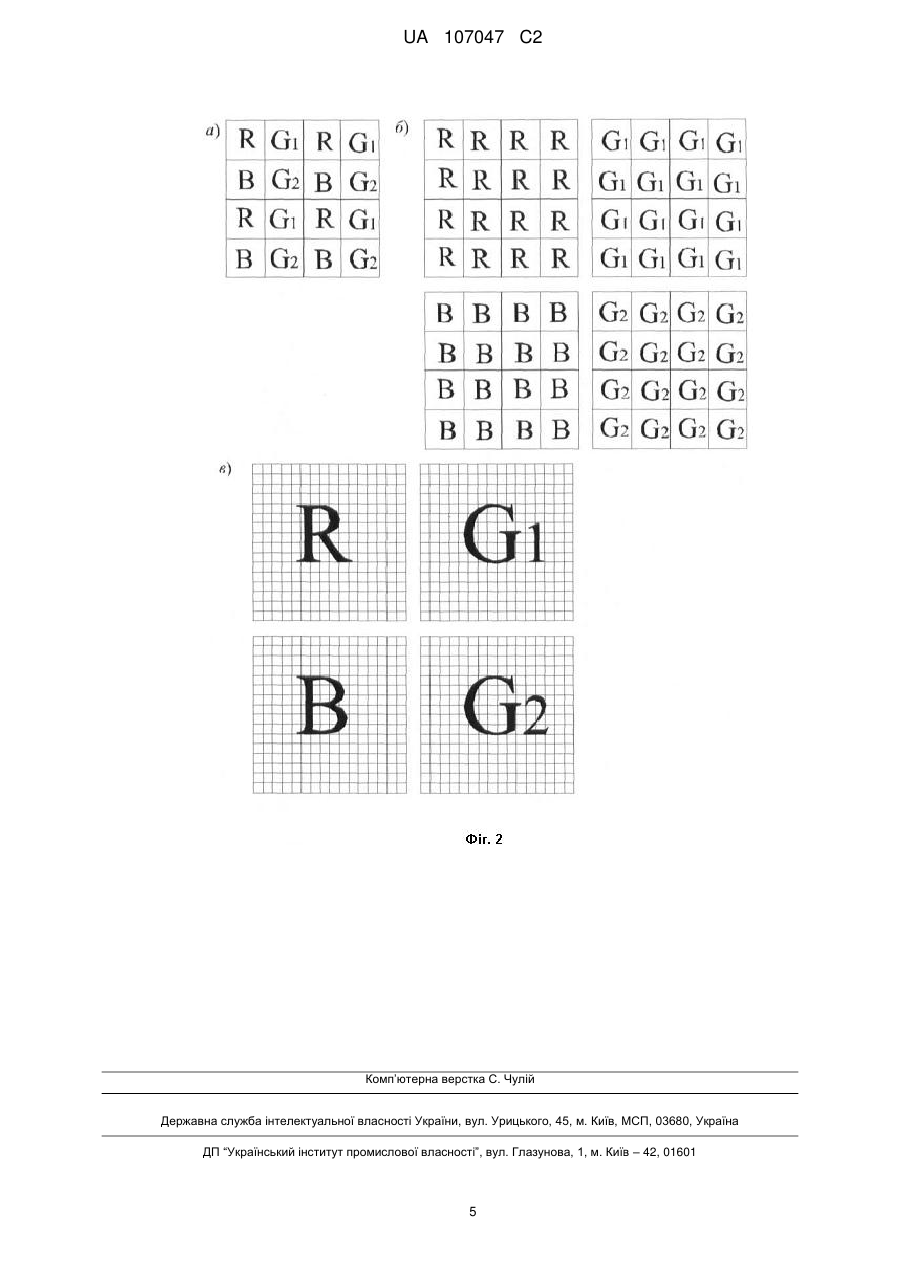
Реферат: Винахід належить до галузі аерокосмічного знімання. Спосіб підвищення розрізненості кольорового зображення цифрового аерокосмічного знімку базується на зсуві оптичної осі кольорової цифрової камери і виконанні експозиції в заданих положеннях осі з подальшою обробкою отриманих даних. Для підвищення розрізненості аерокосмічних знімків зсув оптичної осі виконують по П-подібній траєкторії в напрямку рядків і стовпців з експозиціями в вершинах отриманих траєкторій незамкнутого чотирикутника, сторони якого відповідають кутовим розмірам сторін прямокутника піксела ПЗЗ-матриці. Використовуючи дані по рядках і стовпцях отриманих чотирьох зображень об'єкта кольорової ПЗЗ-матриці, будують нові віртуальні однокольорові рядки та стовпці та формують з них окремі віртуальні однокольорові матриці за числом основних кольорів блока пікселів ПЗЗ-матриці. Після формування віртуальних однокольорових матриць виконують субпіксельні зсуви оптичної осі цифрової камери в UA 107047 C2 (12) UA 107047 C2 напрямку рядків та стовпців на n величин розмірів субпікселів та на основі отриманих даних будують субпіксельні віртуальні рядки та стовпці і потім віртуальні однокольорові субпіксельні матриці за числом кольорів пікселів основної матриці. UA 107047 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі аерокосмічного знімання. Відомі способи аерокосмічного знімання, що ґрунтуються на реєстрації зображення об'єкта на мішені багатоелементної фотоприймальної матриці оптико-електронного приладу (ОЕП) [1], відомі традиційні фотографічні способи з фіксацією зображення об'єкта на фотоплівці [2], способи аерокосмічного знімання (АКЗ) зі скануванням зображення місцевості оптикоелектронною системою, що містить ПЗЗ-лінійку [1]. До недоліків відомих способів цифрового аерокосмічного знімання треба віднести: - недостатньо високу розрізнювальну здатність (розрізненість); - мале поле зору. Відомий спосіб та пристрій для реєстрації зображень [3], в якому забезпечується субпіксельна реєстрація країв на зображені шляхом врахування відхилень розподілу яскравості від унімодального. Недоліком цього способу є відсутність фізичного вимірювання субпіксельних сигналів, тобто він є різновидом інтерполяції. Відомий спосіб, що реалізується пристроєм для одержання зображень з реєстрацією субпіксельної інформації [4], в якому визначаються інтенсивності сигналів та центроїди місць розташування сигналів в межах кожного піксела. Недоліком цього способу та пристрою є висока складність конструкції: кожний фотоприймальний елемент матриці обладнується декількома додатковими вимірювальними електродами та передпідсилювачами сигналів. Ще відомий спосіб для одержання зображень з надрозрізненістю, що реалізується пристроєм [5], в якому субпіксельний сигнал формується за допомогою дифракційних елементів з мікролінзами в кожному пікселі. Недоліком цього способу та пристрою також є висока складність конструкції. Відомий оптико-електронний пристрій та спосіб його функціонування [6], в якому здійснюється субпіксельний зсув зображення за рахунок додаткової оптичної системи. Недоліком цього способу є обмеження кількості субпікселів, що розрізняються, кількістю додаткових оптичних систем, що унеможливлює значне підвищення розрізнювальної здатності знімальної системи. Загальним недоліком вищеописаних відомих способів аерокосмічної зйомки є неможливість суттєвого підвищення роздільності кольорової цифрової камери та отримуваного камерою кольорового цифрового знімку з використанням субпіксельних технологій. Спосіб дистанційного знімання [7] є ефективним у чорно-білому варіанті, але для кольорових знімків може бути використаний тільки частково. Спосіб [7] дистанційного знімання аерокосмічних знімків ґрунтується на субпіксельній технології і його можна використовувати як аналог, прийнятого за прототип. Загальною ознакою з запропонованим способом є наявність зсуву зображення об'єкту при зніманні. Задачею винаходу є підвищення геометричної розрізненості аерокосмічного кольорового знімку. Поставлена задача вирішується за рахунок створення способу підвищення розрізненості кольорового зображення цифрового аерокосмічного знімку, що базується на зсуві оптичної осі кольорової цифрової камери і виконанні експозиції в заданих положеннях осі з подальшою обробкою отриманих даних, який відрізняється тим, що зсув оптичної осі виконують по Пподібній траєкторії в напрямку рядків і стовпців з експозиціями в вершинах отриманих траєкторій незамкнутого чотирикутника, сторони якого відповідають кутовим розмірам сторін прямокутника піксела ПЗЗ-матриці, при цьому, використовуючи дані по рядках і стовпцях отриманих чотирьох зображень об'єкта кольорової ПЗЗ-матриці, будують нові віртуальні однокольорові рядки та стовпці та формують з них окремі віртуальні однокольорові матриці за числом основних кольорів блока пікселів ПЗЗ-матриці; після формування віртуальних однокольорових матриць виконують субпіксельні зсуви оптичної осі цифрової камери в напрямку рядків та стовпців на n величин розмірів субпікселів та на основі отриманих даних будують субпіксельні віртуальні рядки та стовпці і потім віртуальні однокольорові субпіксельні матриці за числом кольорів пікселів основної матриці. Технічним результатом є підвищення розрізненості кольорового зображення цифрового аерокосмічного знімку як мінімум в чотири рази. На фіг. 1 показана схема пристрою для реалізації запропонованого способу: 1 - об'єктив 2 - ППП (плоско-паралельна пластина) 3 - п'єзоелектричні шайби 4 - фотоприймальна матриця 5 - корпус 6 - передпідсилювач 1 UA 107047 C2 5 10 15 20 25 30 35 7 - блок обробки інформації 8 - блок управління 9 - генераторний блок 10 - програмний блок 11 - блок запису і збереження інформації. Вузли 1...4 розміщені в єдиному жорсткому корпусі 5. Електронні блоки 6...11 можуть бути розміщені як в корпусі 5, так і поза корпусом та зв'язані між собою і з матрицею 4 електрично. Робота пристрою відбувається наступним чином. Світлові промені від об'єкту з зовнішнього простору падають на об'єктив 1, який фокусує промені, що проходять через ППП 2 на мішень матриці 4, де утворюється зображення об'єкта. Прозора скляна ППП 2 закріплена на внутрішніх виступах корпусу 5 на трьох п'єзоелектричних шайбах, розташованих під кутами 120° по окружності корпуса. За командою блока управління 8 здійснюється включення блоків 4, 6, 7, 8, 9, 10, 11, при цьому електричні сигнали від блока 4 посилюються блоком 6 та направляються на вхід блока 7, де виконується обробка отримуваних цифрових зображень. Одночасно по команді блока 8 через блок 10 (за закладеною в нього програмою) блок 9 подає необхідні напруги на п'єзоелектричні шайби 3, при цьому змінюються розміри шайб, викликаючи зміну нахилу ППП 2 в заданих напрямках на задані кути, що забезпечує зміщення зображення об'єкту, що знімається, на мішені матриці 4. За сигналами блока 9 зміна товщини шайб 3 відповідно з програмою блока 10 призводить до траєкторії переміщення зображення об'єкта мішені матриці 4 у вигляді чотирикутника зі сторонами mрх та mру, кратними сторонам піксела матриці; при положенні зображення в кожній вершині цього чотирикутника за командою блока 8 виконується експозиція. Отримані таким чином сигнали дозволяють сформувати чотири варіанти однокольорових матриць, тобто чотири віртуальні матриці, кожна з яких складається з однокольорових пікселів, наприклад, R, G1, G2, В. Порівняно з вихідною матрицею віртуальні рядки та стовпці мають лінійну розрізненість в два рази вище, а отримана віртуальна матриця має розрізненість по площі в чотири рази вище. Подальше підвищення розрізненості отримують зменшуючи дискретне зміщення p p зображення послідовно по осях X та Y матриці на величину m x та m y , де n - знаменник n n при діленні сторони піксела на субпіксельні відрізки. Наприклад, при n = 2 для кожного кольору отримаємо дві віртуальні матриці з підвищенням лінійної розрізненості в два рази, а відносно вихідної матриці - в чотири рази. Сигнали про рівень засвічування пікселів віртуальних матриць обробляються в блоці 7 по технології, викладеній в [7], при цьому в процесі подальшого знімання почергово виконують кутове зміщення оптичної осі знімального приладу по напрямку рядків і стовпців фотоприймача матриці на кількість позицій n з інтервалом: 40 Px Py та , ѓn ѓn де: Px , Py - лінійні розміри сторін прямокутного піксела матриці; - фокусна відстань об'єктива цифрової камери; 20626 5 - кутова константа. При дешифруванні визначають рівень електричних сигналів від засвічування прямокутних PxPy P P ділянок пікселів, де x , y - сторони прямокутної ділянки відповідно по напрямках n2 n n рядків і стовпців, базуючись на групи пікселів з однаковим рівнем сигналів від їх засвічування, переважно мінімального рівня, після чого по даних сигналах від прямокутних ділянок визначають рівень електричного сигналу для кожної ділянки піксела площиною 45 50 PxPy n2 , що відповідає його засвічуванню, і таким чином поділяють кожний піксел кожної віртуальної 2 однокольорової ПЗЗ-матриці на n субпікселів. На фіг. 2 показано поетапне перетворення кольорової матриці R, G1, G2, В у віртуальні однокольорові субпіксельні матриці для варіанта n = 2 а) вихідна ПЗЗ-матриця; б) перший етап: віртуальні однокольорові матриці R, G1, G2, В; в) другий етап: віртуальні однокольорові субпіксельні матриці із розміром субпіксела PxPy 4 при n = 2. 2 UA 107047 C2 5 10 15 Таким чином, запропонований спосіб дозволяє отримати підвищення розрізненості 2 аерокосмічних знімків по площі в 4n разів за рахунок заміни пікселів субпікселами для кожної з отриманих на першому етапі віртуальних матриць R, G1, G2, В. Література: 1. Савиных В.П., Цветков В.Я. Геоинформационный анализ данных дистанционного зондирования Земли. - М.: Картгеоцентр-Геоиздат, 2001. - 228 с. 2. Дорожинський О.Л. Основи фотограмметрії. - Львів: Видавництво Національного університету «Львівська політехніка», 2003. - 214 с. 3. Shiba H. Image registration method, image registration apparatus and recording medium/ United States Patent No 6,434,279. - August 13, 2002. 4. Jackson W.B., Jared D.A., Basu S., Biegelsen D.K. Position sensitive detector based image conversion system capable of preserving subpixel information/ United States Patent No 5,754,690. May 19, 1998/. 5. Mendlovicy D., Zalevski Z., Konforti N., Marom E., Shabtay G., Levy U., Karako S. Superresolving imaging system/ United States Patent No 6,344,893. - February 5, 2002. 6. Waslowski K., Merettig G. Opto-electronic device and method for its operation/ European Patent No 1821120. - 16.02.2007. 7. Бурачек В.Г., Зацерковний В.I., Попов М.О., Станкевич С.А. Спосіб дистанційної зйомки. Патент України на винахід № 95696, 25.08.2011, Бюл. № 16. 20 ФОРМУЛА ВИНАХОДУ 25 30 35 Спосіб підвищення розрізненості кольорового зображення цифрового аерокосмічного знімка, що базується на зсуві оптичної осі кольорової цифрової камери і виконанні експозиції в заданих положеннях осі з подальшою обробкою отриманих даних, який відрізняється тим, що зсув оптичної осі виконують по П-подібній траєкторії в напрямку рядків і стовпців з експозиціями в вершинах отриманих траєкторій незамкнутого чотирикутника, сторони якого відповідають кутовим розмірам сторін прямокутника піксела ПЗЗ-матриці, при цьому, використовуючи дані по рядках і стовпцях отриманих чотирьох зображень об'єкта кольорової ПЗЗ-матриці, будують нові віртуальні однокольорові рядки та стовпці та формують з них окремі віртуальні однокольорові матриці за числом основних кольорів блока пікселів ПЗЗ-матриці; після формування віртуальних однокольорових матриць виконують субпіксельні зсуви оптичної осі цифрової камери в напрямку рядків та стовпців на n величин розмірів субпікселів та на основі отриманих даних будують субпіксельні віртуальні рядки та стовпці і потім віртуальні однокольорові субпіксельні матриці за числом кольорів пікселів основної матриці. 3 UA 107047 C2 4 UA 107047 C2 Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюBurachek Vsevolod Hermanovych, Donets Volodymyr Volodymyrovych, Stankevych Serhii Arseniiovych
Автори російськоюБурачек Всеволод Германович, Донец Владимир Владимирович, Станкевич Сергей Арсениевич
МПК / Мітки
МПК: G01C 11/02
Мітки: зображення, кольорового, цифрового, аерокосмічного, спосіб, підвищення, розрізненості, знімка
Код посилання
<a href="https://ua.patents.su/7-107047-sposib-pidvishhennya-rozriznenosti-kolorovogo-zobrazhennya-cifrovogo-aerokosmichnogo-znimka.html" target="_blank" rel="follow" title="База патентів України">Спосіб підвищення розрізненості кольорового зображення цифрового аерокосмічного знімка</a>
Спосіб комплексного підвищення якості цифрового багатоспектрального аерокосмічного знімка
Номер патенту: 96725
Опубліковано: 25.11.2011
Автори: Пилипчук Валентин Володимирович, Вишневий Сергій Валерійович, Попов Михайло Олексійович, Топольницький Максим Валентинович, Жук Сергій Якович, Гунько Юрій Іванович
Мітки: цифрового, комплексного, спосіб, знімка, аерокосмічного, багатоспектрального, підвищення, якості
Формула / Реферат:
Спосіб комплексного підвищення якості цифрового багатоспектрального аерокосмічного знімка, у складі якого панхроматичне зображення високої просторової якості і сукупність з N оригінальних зональних зображень більш низької просторової якості, за яким для підвищення якості зональних зображень піксельна розмірність кожного із зональних зображень проводиться шляхом ресемплінгу до піксельної розмірності панхроматичного зображення, при цьому за...
Адаптивний спосіб підвищення якості цифрового багатоспектрального/гіперспектрального аерокосмічного знімка
Номер патенту: 99695
Опубліковано: 10.09.2012
Автори: Зайцев Олександр Вікторович, Пилипчук Валентин Володимирович, Гунько Юрій Іванович, Попов Михайло Олексійович, Топольницький Максим Валентинович
Мітки: спосіб, знімка, якості, цифрового, аерокосмічного, підвищення, адаптивний
Формула / Реферат:
Адаптивний спосіб підвищення якості цифрового багатоспектрального/гіперспектрального аерокосмічного знімка, у складі якого панхроматичне зображення високої радіометричної та просторової якості та сукупність з N оригінальних зональних зображень більш низької радіометричної та просторової якості, за яким зональні зображення фільтрують, піксельну розмірність кожного з них шляхом ресемплінгу приводять до розмірності панхроматичного зображення,...
Спосіб одержання додаткових зональних зображень багатозонального цифрового аерокосмічного знімка
Номер патенту: 75299
Опубліковано: 15.03.2006
Автори: Попов Михайло Олексійович, Мосов Сергій Петрович, Волошин В'ячеслав Іванович, Станкевич Сергій Арсенійович
Мітки: одержання, зональних, знімка, цифрового, спосіб, додаткових, аерокосмічного, зображень, багатозонального
Формула / Реферат:
Спосіб одержання додаткових зональних зображень багатозонального цифрового аерокосмічного знімка, при якому одержують функції спектральної чутливості першого та другого із існуючих зональних каналів багатозонального цифрового аерокосмічного знімка, визначають значення сигналів пікселів у кожному зональному каналі багатозонального цифрового зображення, застосовують вказане значення до кожного піксела кожного зонального каналу, який...
Спосіб відображення багатозонального цифрового аерокосмічного знімка на кольоровому дисплеї
Номер патенту: 75298
Опубліковано: 15.03.2006
Автори: Волошин В'ячеслав Іванович, Мосов Сергій Петрович, Попов Михайло Олексійович, Станкевич Сергій Арсенійович
Мітки: знімка, аерокосмічного, цифрового, відображення, кольоровому, багатозонального, спосіб, дисплеї
Формула / Реферат:
Спосіб відображення багатозонального цифрового аерокосмічного знімка на кольоровому дисплеї, при якому одержують багатозональний цифровий аерокосмічний знімок, отримують спектральний колориметричний опис кожного колоранта дисплея, задають початкове наближення набору коефіцієнтів складу колорантів дисплея, де кожний коефіцієнт визначає частку відповідного колоранта в наборі колорантів, обчислюють різницю між отриманими кольорами об'єкта і...
Спосіб відображення багатозонального цифрового аерокосмічного знімка на кольоровому дисплеї
Номер патенту: 102774
Опубліковано: 12.08.2013
Автори: Мосов Сергій Петрович, Попов Михайло Олексійович, Станкевич Сергій Арсенійович, Кондратов Олександр Михайлович, Титаренко Ольга Вікторівна, Андронов Віталій Віталійович, Герда Максим Ігорович
МПК: G06K 9/00
Мітки: цифрового, аерокосмічного, знімка, кольоровому, дисплеї, спосіб, багатозонального, відображення
Формула / Реферат:
1. Спосіб відображення багатозонального цифрового аерокосмічного знімка на кольоровому дисплеї, при якому одержують багатозональний цифровий аерокосмічний знімок, отримують спектральний колориметричний опис кожного колоранта дисплея, задають початкове наближення набору коефіцієнтів складу колорантів дисплея, де кожний коефіцієнт визначає частку відповідного колоранта в наборі колорантів, виконують попередній аналіз та класифікацію фонів...
Попередній патент: Пристрій для дистанційного знімання
Наступний патент: Адитивний спосіб врахування щільності ґрунту при визначенні його вологості радіоізотопними методами
Випадковий патент: Спосіб нарізання зубчастих коліс