Спосіб керування вектором тяги рідинного ракетного двигуна та рідинний ракетний двигун з його застосуванням
Номер патенту: 108677
Опубліковано: 25.05.2015
Автори: Сироткіна Наталія Петрівна, Коваленко Микола Дмитрович, Коваленко Галина Миколаївна, Стрельников Геннадій Опанасович, Шептун Юрій Дмитрович, Коваленко Тит Олександрович
Формула / Реферат
1. Спосіб керування вектором тяги рідинного ракетного двигуна, що забезпечується відповідно до потрібних бокових сил шляхом збільшення або зменшення кута повороту двигуна відносно осі літального апарата в шарнірному вузлі, розташованому над форсунковою головкою камери згоряння, за допомогою приводів хитання двигуна, який відрізняється тим, що сукупно застосовано механічне керування вектором тяги хитанням двигуна, закріпленого в шарнірному вузлі, та газодинамічне керування вектором тяги двигуна несиметричним вдувом генераторного газу, відпрацьованого на турбіні, в надзвукову частину сопла з використанням приводів, з'єднаних між собою та з системою керування польотом літального апарата.
2. Спосіб за п. 1, який відрізняється тим, що газодинамічне керування вектора тяги двигуна здійснюється в пропорційному (аналоговому) режимі шляхом перерозподілу генераторного газу, що вдувається, між діаметрально протилежними вузлами вдуву в площинах керування польотом літального апарата (по тангажу і курсу) з потрібними для стабілізації польоту боковими силами, а механічне керування вектора тяги здійснюється ступінчасто або плавно шляхом одноразового або періодичного відхилення рідинного ракетного двигуна на потрібний кут.
3. Рідинний ракетний двигун з керованим вектором тяги, що містить камеру згоряння з надзвуковим соплом, турбонасосний агрегат подачі компонентів палива в камеру згоряння з турбіною, вихлопний колектор якої з'єднано газоводом з системою вдуву вихлопного газу в надзвукову частину сопла, шарнірний вузол хитання двигуна, встановлений над форсунковою головкою камери і з'єднаний з фланцем конструкції ступеня ракети, з приводами хитання двигуна, з'єднаними з системою керування польотом літального апарата, який відрізняється тим, що в кожній чверті сопла в площині керування вектором тяги двигуна виготовлено вузли вдуву генераторного газу в надзвукову частину сопла, які з'єднані з газорозподільниками, кожний з яких з'єднано газоводами з вихлопним колектором турбіни і оснащено приводами, з'єднаними з системою керування вектором тяги.
4. Рідинний ракетний двигун за п. 3, який відрізняється тим, що в кожній площині керування польотом літального апарата (по тангажу і курсу) встановлено по два приводи, які розташовані в площині поперечного перерізу корпусу розгінного блока в районі вихідної частині сопла двигуна і з'єднані з бандажем, виготовленим на зовнішній поверхні сопла, і з силовим шпангоутом ступеня ракети.
5. Рідинний ракетний двигун за пп. 3, 4, який відрізняється тим, що приводи хитання двигуна виготовлені з пристроями багаторазового включення в роботу, а також можливістю плавного або ступінчастого керування (з однією, двома і більше ступенями) кута відхилення двигуна.
Текст
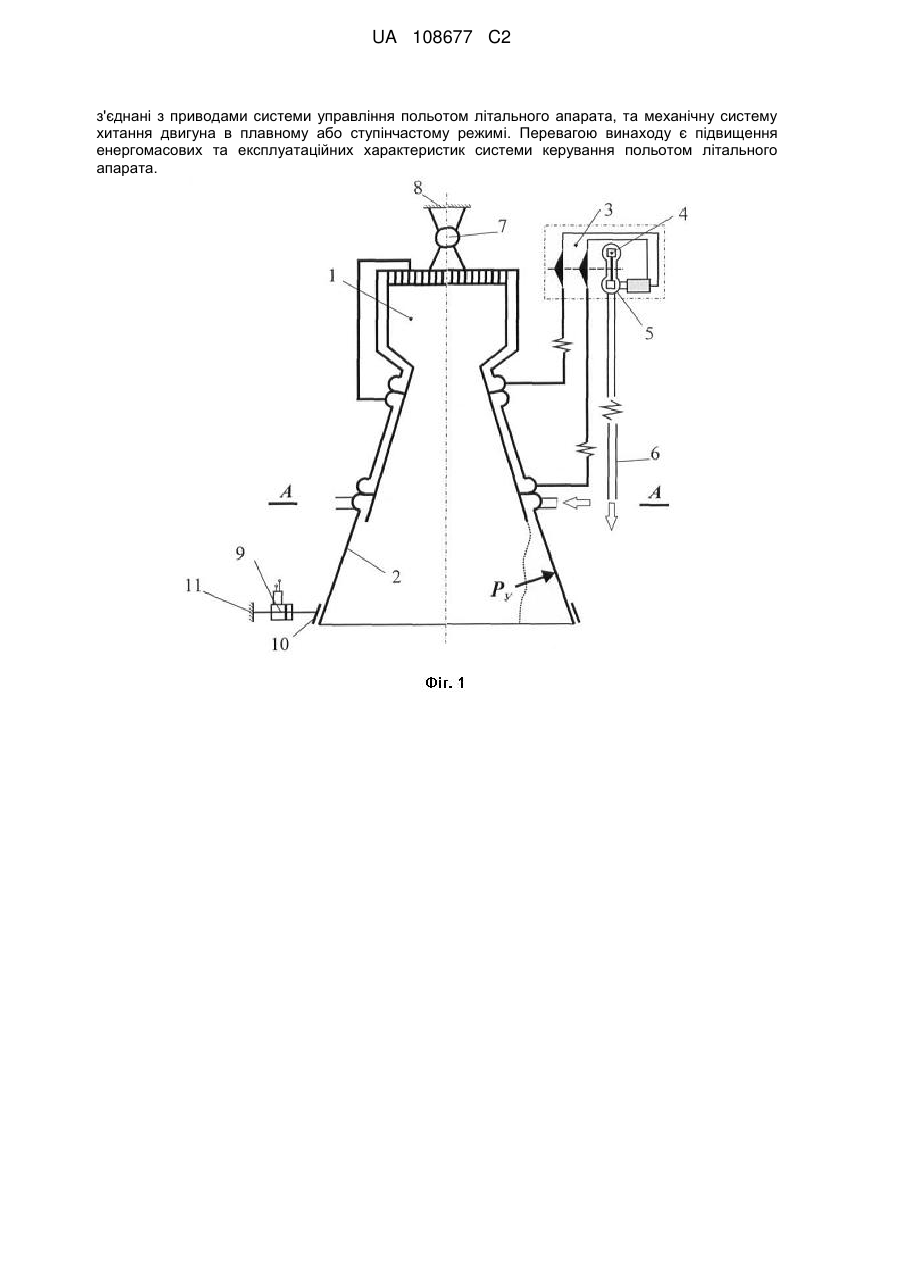
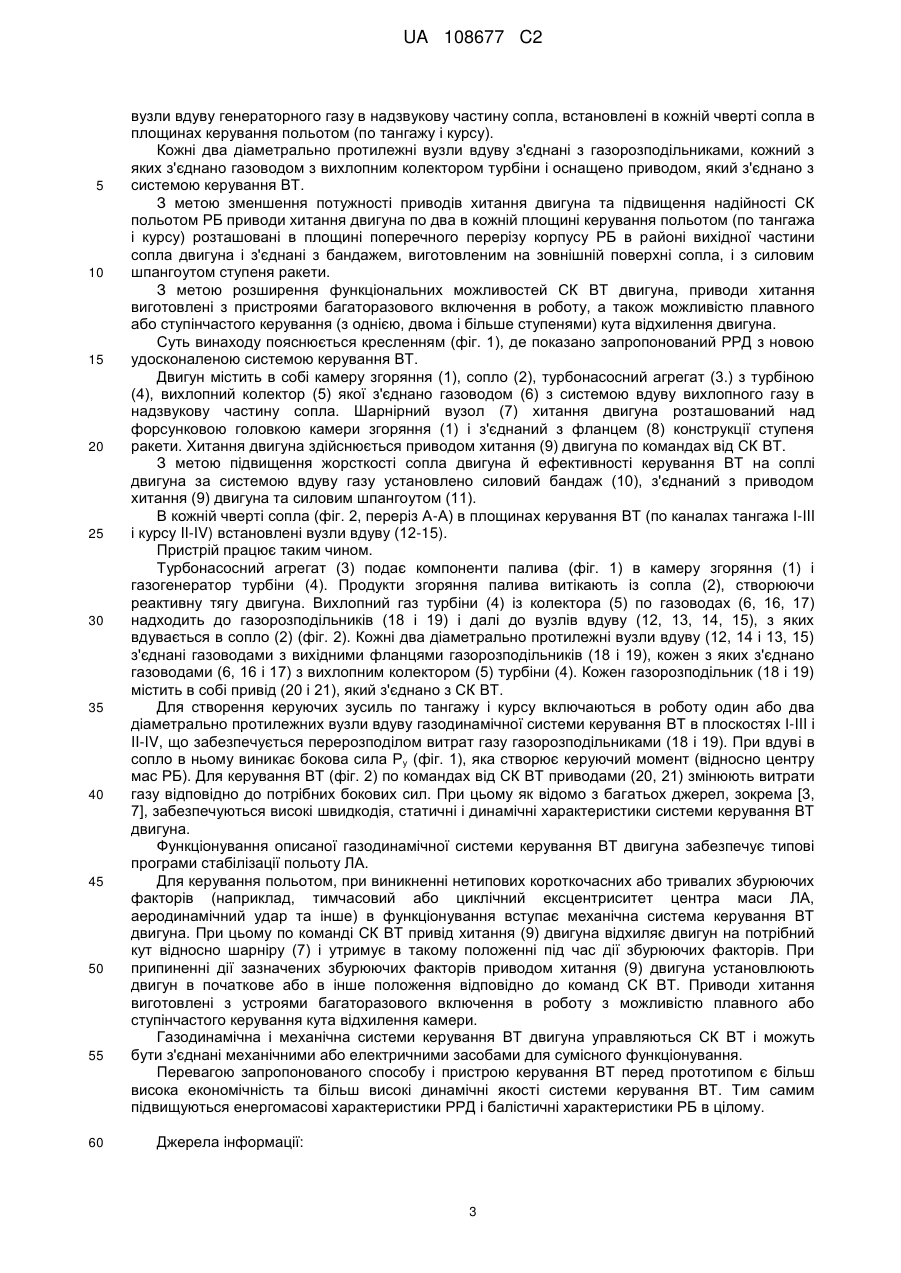
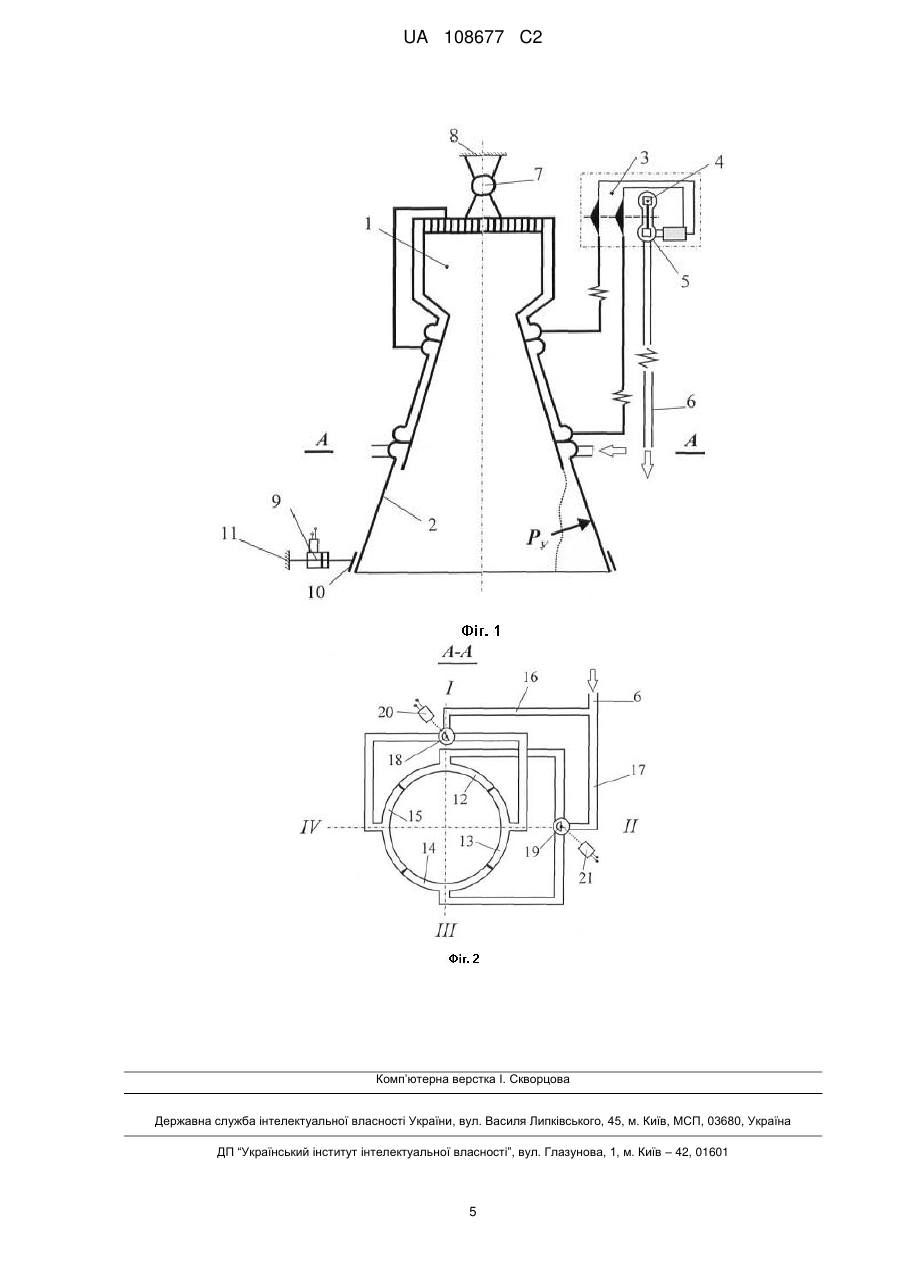
Реферат: Винахід належить до ракетно-космічної техніки і може бути використаний для керування вектором тяги маршового рідинного ракетного двигуна з турбонасосною подачею компонентів палива для розгінних блоків космічних апаратів з метою керування польотом літального апарата. Спосіб базується на сукупному застосуванні газодинамічного керування вектором тяги рідинного ракетного двигуна плавно регульованим вдувом вихлопного турбінного газу в надзвуковий потік сопла і механічного керування хитанням двигуна. Пристрій являє собою рідинний ракетний двигун, що містить в собі камеру згоряння з надзвуковим соплом, турбонасосну систему подачі палива в камеру згоряння з турбіною, газодинамічну систему керування вектором тяги з вузлами вдуву вихлопного газу в сопло, які UA 108677 C2 (12) UA 108677 C2 з'єднані з приводами системи управління польотом літального апарата, та механічну систему хитання двигуна в плавному або ступінчастому режимі. Перевагою винаходу є підвищення енергомасових та експлуатаційних характеристик системи керування польотом літального апарата. UA 108677 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до ракетно-космічної техніки і може бути використаний для керування вектором тяги (ВТ) маршового рідинного ракетного двигуна (РРД) з турбонасосною подачею компонентів палива для розгінних блоків (РБ) космічних апаратів (КА) з метою керування польотом літального апарату (ЛА). Особливістю сучасних і перспективних РБ КА є те, що вони виконують все більш ускладнені програми польоту. Наприклад, вони повинні виводити в різні точки навколоземних орбіт декілька КА однієї або різної маси, виконувати короткочасні маневри при розведенні КА та інше. В зв'язку з цим збільшуються вимоги до виконавчих органів системи керування (СК) польотом РБ, зокрема необхідна розробка нових способів керування ВТ маршового двигуна. Забезпечення більш широких функціональних можливостей при збереженні високих експлуатаційних та енергомасових характеристик двигунної установки (ДУ) і РБ є однією з найважливіших задач подальшого вдосконалення ракетно-космічної техніки. При цьому дуже важливе значення має вдосконалення системи керування ВТ двигуна для виконання задач керування польотом КА [1, 2, 3]. Відомо з багатьох джерел, зокрема [2, 3], що СК польотом ЛА виконує дві функції: - наведення польоту ЛА за заданою (розрахунковою) траєкторією; - стабілізація параметрів польоту ЛА при дії на нього збурюючих факторів. В переважній більшості зазначені дві функції виконує один виконавчий орган СК польотом ЛА, який входить до складу маршового двигуна і забезпечує створення сил в площинах керування польотом ЛА - по каналах тангажу, курсу (рисканню) і крену шляхом керування ВТ двигуна [2-5]. Виконання більш широких і нових функціональних задач РБ збільшує завантаження виконавчих органів СК польотом, при цьому збільшуються енергозатрати на керування ВТ двигуна. Але деякі з відомих способів керування ВТ двигуна не здатні з достатньою надійністю виконувати додаткові функціональні завдання. На верхніх ступенях ракет-носіїв (РН) в переважній більшості застосовуються РРД, ВТ яких регулюється механічним способом (хитання камери чи двигуна в цілому) [2, 3, 5] або газодинамічним способом (несиметрична інжекція в надзвукову частину сопла рідинних компонентів палива або продуктів їх згоряння) [3, 4, 6, 7]. Кожний з відомих способів і пристроїв має свої переваги і недоліки, які в конкретних умовах визначають оптимальність того або іншого способу. Відомі способи і пристрої керування ВТ РРД (аналоги), які засновано на повороті камери (або двигуна в цілому) відносно шарнірного вузла за допомогою приводів [2, 3, 4, 5], з'єднаних з СК польотом ЛА. Перевагою цього способу є те, що він забезпечує при малих витратах компоненту палива (і, як наслідок, при збереженні високої економічності ДУ) широкий діапазон керування ВТ двигуна, в тому числі в розширеному діапазоні, для компенсування великих короткочасних або тривалих нетипових факторів (бокових сил Ру), що збурюють політ РБ. Бокові сили можуть перевищувати величину 0,06 Рдв, де Рдв - тяга двигуна. Такі, збурюючі політ, бокові сили створюються, наприклад, при польоті сучасних і перспективних РБ, які послідовно виводять на орбіту (орбіти) декілька КА приблизно рівної маси. При відділенні від РБ одного із таких КА створюється великий ексцентриситет центра мас КА, який має бути компенсований (парируваний) виконавчими органами СК польотом. Це досягається відхиленням двигуна на відповідний кут і утриманням цього положення системою стабілізації польотом РБ. Недоліком цих відомих механічних способів і пристроїв є те, що вони мають низькі та нестабільні динамічні характеристики, мають проблеми щодо надійного забезпечення режимів стабілізації польоту РБ при різних ексцентриситетах мас. Режими стабілізації польоту не можуть бути надійно відпрацьовані в наземних умовах при вогневих стендових випробуваннях. Для достатньої швидкості хитання зазначених вище висотних двигунів (двигунів з розширенням газу до дуже низького тиску - до 0,03 МПа) необхідне використання потужних та швидкісних приводів і складних гідросистем, що приводить до різкого збільшення проблем керування ЛА (зокрема РБ), або робить неможливим забезпечення надійності режимів стабілізації його польоту. Відомі газодинамічні способи керування ВТ РРД шляхом несиметричної інжекції в надзвукову частину сопла рідинних компонентів палива або продуктів їх згоряння зазначених недоліків не мають [2, 3, 6, 7]. Але при створенні зазначених більших тривалих бокових сил, керуючих польотом, це вимагає більших витрат компонентів палива, що різко (в переважній більшості недопустимо) знижує економічність ДУ. Зокрема такі способи і пристрої керування ВТ РРД детально описані і аналізуються в [3, 6, 7]. 1 UA 108677 C2 5 10 15 20 25 30 35 40 45 50 55 60 Задачею винаходу є вдосконалення способу керування ВТ РРД шляхом застосування переваг механічного та газодинамічного способів з використанням нових технічних рішень щодо їх сукупного функціонування в СК польотом ЛА. Найближчим аналогом (прототипом) способу і пристрою, що заявляється, і де застосовано нові рішення, є спосіб керування вектором тяги РРД та РРД РД861К, описаний в [5, 7 (див. частину описів аналогів), 8]. В ньому керування ВТ забезпечується поворотом двигуна відносно шарнірного вузла, виготовленого над форсунковою головкою камери згоряння, за допомогою двох приводів (по одному приводу в кожній площині керування польотом - по тангажу і курсу), з'єднаних з СК польотом ЛА. Для забезпечення високих габаритно-компоновочних і енергомасових характеристик двигуна вихлопний турбінний газ із вихлопного колектора турбіни направляється в кільцевий колектор вдуву газу в надзвукову частину сопла. До загальних істотних ознак прототипу і нового способу, що заявляється, відноситься те, що керування ВТ двигуна забезпечується відповідно до потрібних бокових сил шляхом збільшення або зменшення кута повороту двигуна відносно осі ЛА в шарнірному вузлі, розташованому над форсунковою головкою камери згоряння, за допомогою приводів хитання двигуна. Недоліками способу прототипу є ті, що не забезпечуються високі та стабільні динамічні характеристики двигуна, існують проблеми щодо надійного забезпечення режимів стабілізації польоту РБ при різних ексцентриситетах мас, для достатньої швидкості хитання двигунів необхідне використання потужних та швидкісних приводів і складних гідросистем, що приводить до різкого збільшення проблем керування ЛА, а витрата компонентів палива знижує економічність ДУ. В основу винаходу поставлено задачу підвищення динамічних та енергомасових характеристик, а також надійності роботи системи керування ВТ ДУ і, таким чином, підвищення надійності та балістичних характеристик РБ за рахунок удосконалення способу керування ВТ двигуна (зазначеного призначення) шляхом підвищення динамічної якості системи та зменшення витрат компонента палива на керування польотом ЛА. Поставлена задача вирішується тим, що у новому способі керування ВТ двигуна сукупно застосовано механічний спосіб керування ВТ РРД хитанням двигуна, закріпленого в шарнірному вузлі, та газодинамічний спосіб керування ВТ РРД несиметричним вдувом відпрацьованого на турбіні генераторного газу в надзвукову частину сопла з використанням приводів, з'єднаних між собою та з СК польотом ЛА. З метою забезпечення високої якості наведення і стабілізації польоту ЛА газодинамічне керування ВТ двигуна здійснюється в пропорційному (аналоговому) режимі шляхом перерозподілу генераторного газу, що вдувається, між діаметрально протилежними вузлами вдуву в площинах управління польотом ЛА (по тангажу і курсу відповідно) з потрібними для стабілізації польоту боковими силами. Механічне керування ВТ здійснюється ступінчасто або плавно шляхом одноразового або періодичного відхилення РРД на потрібний кут. При цьому забезпечується компенсація виникаючих короткочасних або тривалих збурюючих факторів, які діють за межами, характерними для розрахункових режимів стабілізації польоту ЛА. Перевагами запропонованого способу є: - розширення до декількох разів діапазону керування ВТ двигуна при збереженні високих статичних і динамічних характеристик системи; - розширення області стійких режимів стабілізації польоту ЛА; - підвищення надійності роботи системи керування польотом; - зменшення енергозатрат на керування польотом ЛА, зокрема зменшення витрат компоненту палива на керування ВТ двигуна. Задачею винаходу є також вдосконалення конструкції двигуна для впровадження нового способу керування ВТ з більш надійним і економічним керуванням польоту ЛА шляхом сукупного застосування механічної і газодинамічної систем керування ВТ. До загальних істотних ознак нового двигуна і двигуна прототипу РД861К, описаного в [5, 7 (див. частину описів аналогів), 8] належить камера згоряння з надзвуковим соплом, турбонасосний агрегат подачі компонентів палива в камеру згоряння з турбіною, вихлопний колектор якої з'єднано газоводом з системою вдуву вихлопного газу в надзвукову частину сопла, шарнірний вузол хитання двигуна, встановлений над форсунковою головкою камери і з'єднаний з фланцем конструкції ступеня ракети, з приводами хитання двигуна, з'єднаними з системою керування польотом ЛА. Для реалізації нового способу керування ВТ в двигуні з механічною системою керування ВТ (шляхом хитання двигуна в карданному підвісі приводами хитання двигуна, з'єднаними з СК польотом ЛА) сукупно застосовано газодинамічну систему керування ВТ, що містить в собі 2 UA 108677 C2 5 10 15 20 25 30 35 40 45 50 55 60 вузли вдуву генераторного газу в надзвукову частину сопла, встановлені в кожній чверті сопла в площинах керування польотом (по тангажу і курсу). Кожні два діаметрально протилежні вузли вдуву з'єднані з газорозподільниками, кожний з яких з'єднано газоводом з вихлопним колектором турбіни і оснащено приводом, який з'єднано з системою керування ВТ. З метою зменшення потужності приводів хитання двигуна та підвищення надійності СК польотом РБ приводи хитання двигуна по два в кожній площині керування польотом (по тангажа і курсу) розташовані в площині поперечного перерізу корпусу РБ в районі вихідної частини сопла двигуна і з'єднані з бандажем, виготовленим на зовнішній поверхні сопла, і з силовим шпангоутом ступеня ракети. З метою розширення функціональних можливостей СК ВТ двигуна, приводи хитання виготовлені з пристроями багаторазового включення в роботу, а також можливістю плавного або ступінчастого керування (з однією, двома і більше ступенями) кута відхилення двигуна. Суть винаходу пояснюється кресленням (фіг. 1), де показано запропонований РРД з новою удосконаленою системою керування ВТ. Двигун містить в собі камеру згоряння (1), сопло (2), турбонасосний агрегат (3.) з турбіною (4), вихлопний колектор (5) якої з'єднано газоводом (6) з системою вдуву вихлопного газу в надзвукову частину сопла. Шарнірний вузол (7) хитання двигуна розташований над форсунковою головкою камери згоряння (1) і з'єднаний з фланцем (8) конструкції ступеня ракети. Хитання двигуна здійснюється приводом хитання (9) двигуна по командах від СК ВТ. З метою підвищення жорсткості сопла двигуна й ефективності керування ВТ на соплі двигуна за системою вдуву газу установлено силовий бандаж (10), з'єднаний з приводом хитання (9) двигуна та силовим шпангоутом (11). В кожній чверті сопла (фіг. 2, переріз А-А) в площинах керування ВТ (по каналах тангажа І-ІII і курсу II-IV) встановлені вузли вдуву (12-15). Пристрій працює таким чином. Турбонасосний агрегат (3) подає компоненти палива (фіг. 1) в камеру згоряння (1) і газогенератор турбіни (4). Продукти згоряння палива витікають із сопла (2), створюючи реактивну тягу двигуна. Вихлопний газ турбіни (4) із колектора (5) по газоводах (6, 16, 17) надходить до газорозподільників (18 і 19) і далі до вузлів вдуву (12, 13, 14, 15), з яких вдувається в сопло (2) (фіг. 2). Кожні два діаметрально протилежні вузли вдуву (12, 14 і 13, 15) з'єднані газоводами з вихідними фланцями газорозподільників (18 і 19), кожен з яких з'єднано газоводами (6, 16 і 17) з вихлопним колектором (5) турбіни (4). Кожен газорозподільник (18 і 19) містить в собі привід (20 і 21), який з'єднано з СК ВТ. Для створення керуючих зусиль по тангажу і курсу включаються в роботу один або два діаметрально протилежних вузли вдуву газодинамічної системи керування ВТ в плоскостях І-III і II-IV, що забезпечується перерозподілом витрат газу газорозподільниками (18 і 19). При вдуві в сопло в ньому виникає бокова сила Ру (фіг. 1), яка створює керуючий момент (відносно центру мас РБ). Для керування ВТ (фіг. 2) по командах від СК ВТ приводами (20, 21) змінюють витрати газу відповідно до потрібних бокових сил. При цьому як відомо з багатьох джерел, зокрема [3, 7], забезпечуються високі швидкодія, статичні і динамічні характеристики системи керування ВТ двигуна. Функціонування описаної газодинамічної системи керування ВТ двигуна забезпечує типові програми стабілізації польоту ЛА. Для керування польотом, при виникненні нетипових короткочасних або тривалих збурюючих факторів (наприклад, тимчасовий або циклічний ексцентриситет центра маси ЛА, аеродинамічний удар та інше) в функціонування вступає механічна система керування ВТ двигуна. При цьому по команді СК ВТ привід хитання (9) двигуна відхиляє двигун на потрібний кут відносно шарніру (7) і утримує в такому положенні під час дії збурюючих факторів. При припиненні дії зазначених збурюючих факторів приводом хитання (9) двигуна установлюють двигун в початкове або в інше положення відповідно до команд СК ВТ. Приводи хитання виготовлені з устроями багаторазового включення в роботу з можливістю плавного або ступінчастого керування кута відхилення камери. Газодинамічна і механічна системи керування ВТ двигуна управляються СК ВТ і можуть бути з'єднані механічними або електричними засобами для сумісного функціонування. Перевагою запропонованого способу і пристрою керування ВТ перед прототипом є більш висока економічність та більш високі динамічні якості системи керування ВТ. Тим самим підвищуються енергомасові характеристики РРД і балістичні характеристики РБ в цілому. Джерела інформації: 3 UA 108677 C2 5 10 15 20 1 Коваленко Н. Д. Некоторые тенденции развития двигателестроения в ракетнокосмической технике / Н. Д. Коваленко, Г. А. Стрельников // Материали XII международного конгресса двигателестроителей: Авиационно-космическая техника. - Харьков: ХАИ, 2007. - № 7 (43). - С. 67-71. 2 Ракета как объект управления / И. М. Игдалов, Л. Д. Кучма, Н. В. Поляков, Ю. Д. Шептун / Под ред. С. Н. Конюхова. - Днепропетровск: Арт-Пресс, 2004. - 544 с. 3 Коваленко Н. Д. Ракетный двигатель как исполнительный орган системы управления полетом ракет / Н. Д. Коваленко. - Днепропетровск: Институт технической механики НАН и НКА Украины, 2003. - 412 с. 4 Конюхов С. Н. Ракеты и космические аппараты конструкторского бюро "Южное" / под ред. С. Н. Конюхова.-3-е издание, перераб. и доп. - Днепропетровск: Издательская компания КИТ, 2004. - 260 с. 5 Конюхов С. Н. Украина Космическая. Задача - удержаться на высокотехнологической орбите / С. Н. Конюхов // Экспо 2003, индустрия Украины. - 2003.-№4(29). - С. 38-42. 6 Патент на винахід 71862 Україна, МПК F02K 9/42. Рідинна ракетна двигуна установка щільного компонування з регульованим вектором тяги / Коваленко М. Д., Стрельников Г. О., Коваленко Г. М.; заявник і патентоволодар Інститут технічної механіки НАНУ і НКАУ. а20031213350; заявл. 31.12.2003; опубл. 15.05.2006, Бюл. № 5. - 10 с 7 Патент на винахід 86958 Україна, МПК F02K 9/00. Рідинний ракетний двигун з регульованим вектором тяги / Коваленко М. Д., Стрельников Г. О., Коваленко Г. М., Хоменко О. В., Коваленко Т. О., Сироткіна Н. П.; заявник і патентоволодар Інститут технічної механіки НАНУ і НКАУ. - а200607625; заявл. 07.07.2006; опубл. 10.06.2009, Бюл. № 11. - 10 с 8 Ракета космічного призначення. Буклет ДП "КБ "Південне»». - Дніпропетровськ, 2007. - 20 с. 25 ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 60 1. Спосіб керування вектором тяги рідинного ракетного двигуна, що забезпечується відповідно до потрібних бокових сил шляхом збільшення або зменшення кута повороту двигуна відносно осі літального апарата в шарнірному вузлі, розташованому над форсунковою головкою камери згоряння, за допомогою приводів хитання двигуна, який відрізняється тим, що сукупно застосовано механічне керування вектором тяги хитанням двигуна, закріпленого в шарнірному вузлі, та газодинамічне керування вектором тяги двигуна несиметричним вдувом генераторного газу, відпрацьованого на турбіні, в надзвукову частину сопла з використанням приводів, з'єднаних між собою та з системою керування польотом літального апарата. 2. Спосіб за п. 1, який відрізняється тим, що газодинамічне керування вектора тяги двигуна здійснюється в пропорційному (аналоговому) режимі шляхом перерозподілу генераторного газу, що вдувається, між діаметрально протилежними вузлами вдуву в площинах керування польотом літального апарата (по тангажу і курсу) з потрібними для стабілізації польоту боковими силами, а механічне керування вектора тяги здійснюється ступінчасто або плавно шляхом одноразового або періодичного відхилення рідинного ракетного двигуна на потрібний кут. 3. Рідинний ракетний двигун з керованим вектором тяги, що містить камеру згоряння з надзвуковим соплом, турбонасосний агрегат подачі компонентів палива в камеру згоряння з турбіною, вихлопний колектор якої з'єднано газоводом з системою вдуву вихлопного газу в надзвукову частину сопла, шарнірний вузол хитання двигуна, встановлений над форсунковою головкою камери і з'єднаний з фланцем конструкції ступеня ракети, з приводами хитання двигуна, з'єднаними з системою керування польотом літального апарата, який відрізняється тим, що в кожній чверті сопла в площині керування вектором тяги двигуна виготовлено вузли вдуву генераторного газу в надзвукову частину сопла, які з'єднані з газорозподільниками, кожний з яких з'єднано газоводами з вихлопним колектором турбіни і оснащено приводами, з'єднаними з системою керування вектором тяги. 4. Рідинний ракетний двигун за п. 3, який відрізняється тим, що в кожній площині керування польотом літального апарата (по тангажу і курсу) встановлено по два приводи, які розташовані в площині поперечного перерізу корпусу розгінного блока в районі вихідної частині сопла двигуна і з'єднані з бандажем, виготовленим на зовнішній поверхні сопла, і з силовим шпангоутом ступеня ракети. 5. Рідинний ракетний двигун за пп. 3, 4, який відрізняється тим, що приводи хитання двигуна виготовлені з пристроями багаторазового включення в роботу, а також можливістю плавного або ступінчастого керування (з однією, двома і більше ступенями) кута відхилення двигуна. 4 UA 108677 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F02K 9/00
Мітки: ракетного, ракетний, тяги, двигуна, застосуванням, рідинний, вектором, спосіб, рідинного, керування, двигун
Код посилання
<a href="https://ua.patents.su/7-108677-sposib-keruvannya-vektorom-tyagi-ridinnogo-raketnogo-dviguna-ta-ridinnijj-raketnijj-dvigun-z-jjogo-zastosuvannyam.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування вектором тяги рідинного ракетного двигуна та рідинний ракетний двигун з його застосуванням</a>
Спосіб керування вектором тяги рідинного ракетного двигуна з турбонасосним агрегатом подачі компонентів палива в камеру згоряння та рідинний ракетний двигун з його застосуванням
Номер патенту: 107270
Опубліковано: 10.12.2014
Автори: Коваленко Галина Миколаївна, Коваленко Тит Олександрович, Стрельников Геннадій Опанасович, Шептун Юрій Дмитрович, Сироткіна Наталія Петрівна, Коваленко Микола Дмитрович
МПК: F02K 9/00
Мітки: компонентів, турбонасосним, тяги, спосіб, рідинний, вектором, подачі, керування, рідинного, палива, згоряння, агрегатом, камеру, застосуванням, ракетний, ракетного, двигуна, двигун
Формула / Реферат:
1. Спосіб керування вектором тяги рідинного ракетного двигуна з турбонасосним агрегатом подачі компонентів палива в камеру згоряння (з надзвуковим соплом), що включає подачу вихлопного газу турбіни із вихлопного колектора до двох пар діаметрально протилежних реактивних сопел, що регулюються двома газорозподільниками з приводами, з'єднаними з системою керування польотом літального апарата, який відрізняється тим, що для керування вектором...
Спосіб регулювання вектора тяги рідинного ракетного двигуна та рідинний ракетний двигун з його застосуванням
Номер патенту: 95575
Опубліковано: 10.08.2011
Автори: Коваленко Тит Олександрович, Сироткіна Наталія Петрівна, Коваленко Микола Дмитрович, Коваленко Галина Миколаївна, Стрельников Геннадій Опанасович, Ігнатьєв Олександр Дмитрович
Мітки: рідинний, ракетний, спосіб, застосуванням, вектора, ракетного, регулювання, двигун, рідинного, двигуна, тяги
Формула / Реферат:
1. Спосіб регулювання вектора тяги рідинного ракетного двигуна з турбонасосною системою подачі компонентів палива у камеру згоряння без допалення вихлопного газу турбіни, заснований на несиметричному вдуві газу або вприску рідини в надзвукову частину сопла, який відрізняється тим, що для регулювання вектора тяги в надзвуковий потік сопла послідовно через газорозподілювачі подають необхідними дозами в кожну чверть сопла через вузли вдуву, що...
Спосіб регулювання вектора тяги рідинного ракетного двигуна та рідинний ракетний двигун для його здійснення
Номер патенту: 103528
Опубліковано: 25.10.2013
Автори: Коваленко Тит Олександрович, Коваленко Микола Дмитрович, Стрельников Геннадій Опанасович, Шептун Юрій Дмитрович, Сироткіна Наталія Петрівна
Мітки: рідинний, вектора, ракетного, двигуна, двигун, регулювання, тяги, здійснення, рідинного, ракетний, спосіб
Формула / Реферат:
1. Спосіб регулювання вектора тяги рідинного ракетного двигуна, що заснований на регулюванні витрат компонента палива на вприскування в сопло відповідно до потрібних бокових сил, який відрізняється тим, що сукупно здійснюють газодинамічне регулювання вектора тяги двигуна несиметричним вприскуванням компонента палива в надзвуковий потік сопла через вузли вприскування та механічне регулювання вектора тяги хитанням камери або двигуна в цілому,...
Спосіб регулювання вектора тяги рідинного ракетного двигуна та рідинний ракетний двигун для його здійснення
Номер патенту: 105214
Опубліковано: 25.04.2014
Автори: Коваленко Тит Олександрович, Шептун Юрій Дмитрович, Сироткіна Наталія Петрівна, Коваленко Микола Дмитрович
Мітки: двигун, тяги, ракетний, двигуна, рідинного, регулювання, вектора, здійснення, рідинний, ракетного, спосіб
Формула / Реферат:
1. Спосіб регулювання вектора тяги рідинного ракетного двигуна шляхом несиметричного впорскування в надзвукову частину сопла окислювального компонента палива, що подається із високонапірної магістралі двигуна через канали і форсунки, передбачені в рухомому твердому інтерцепторі, розташованому в вузлі впорскування, що містить в собі пристрої регулювання положення інтерцептора і витрат впорскуваного компонента палива, який вводиться в...
Система керування вектором тяги камери рідинного ракетного двигуна з допалюванням вихлопного газу турбіни в камері згоряння
Номер патенту: 94862
Опубліковано: 10.12.2014
Автори: Коваленко Микола Дмитрович, Ігнатьєв Олександр Дмитрович, Стрельников Геннадій Опанасович
МПК: F02K 9/00
Мітки: газу, турбіни, допалюванням, камери, двигуна, рідинного, система, вектором, згоряння, вихлопного, тяги, ракетного, керування
Формула / Реферат:
1 Система керування вектором тяги камери рідинного ракетного двигуна з турбонасосною системою подачі палива в камеру двигуна і з допалюванням вихлопного турбінного газу в камері згоряння, яка заснована на хитанні камери двигуна відносно карданного шарнірного вузла, виготовленого в газоводі, що з'єднує вихлопний колектор турбіни з форсунковою головкою камери і включає в себе камеру двигуна, з'єднану гнучкими рідинними та газовими...
Попередній патент: Оздоблювальний напівфабрикат піноподібної структури дієтичного призначення
Наступний патент: Вітроенергетична система
Випадковий патент: Відстійник