Лазерний рівнемірний пристрій
Номер патенту: 110140
Опубліковано: 25.11.2015
Автори: Лепіх Ярослав Ілліч, Сантоній Володимир Іванович, Іванченко Іраїда Олександрівна, Будіянська Людмила Михайлівна, Сминтина Валентин Андрійович
Формула / Реферат
Лазерний рівнемірний пристрій, що містить датчик контролю рівня, систему зв′язку, блок узгодження датчика контролю рівня з системою зв′язку та блок електроживлення, який відрізняється тим, що як датчик рівня містить неконтактний лазерний рівнемір, виконаний з можливістю дистанційного вимірювання рівня поверхні фазовим методом шляхом порівняння сигналів на виходах ідентичних за схемною реалізацією опорного та вимірювального каналів фотоприймача, а система зв′язку виконана двосторонньою стільниковою з можливістю передачі інформації із застосуванням SMS-технології передачі інформації: у прямому напрямку - для безпровідної передачі даних лазерного рівнеміра, у зворотному - для дистанційного керування вимірювальним процесом.
Текст
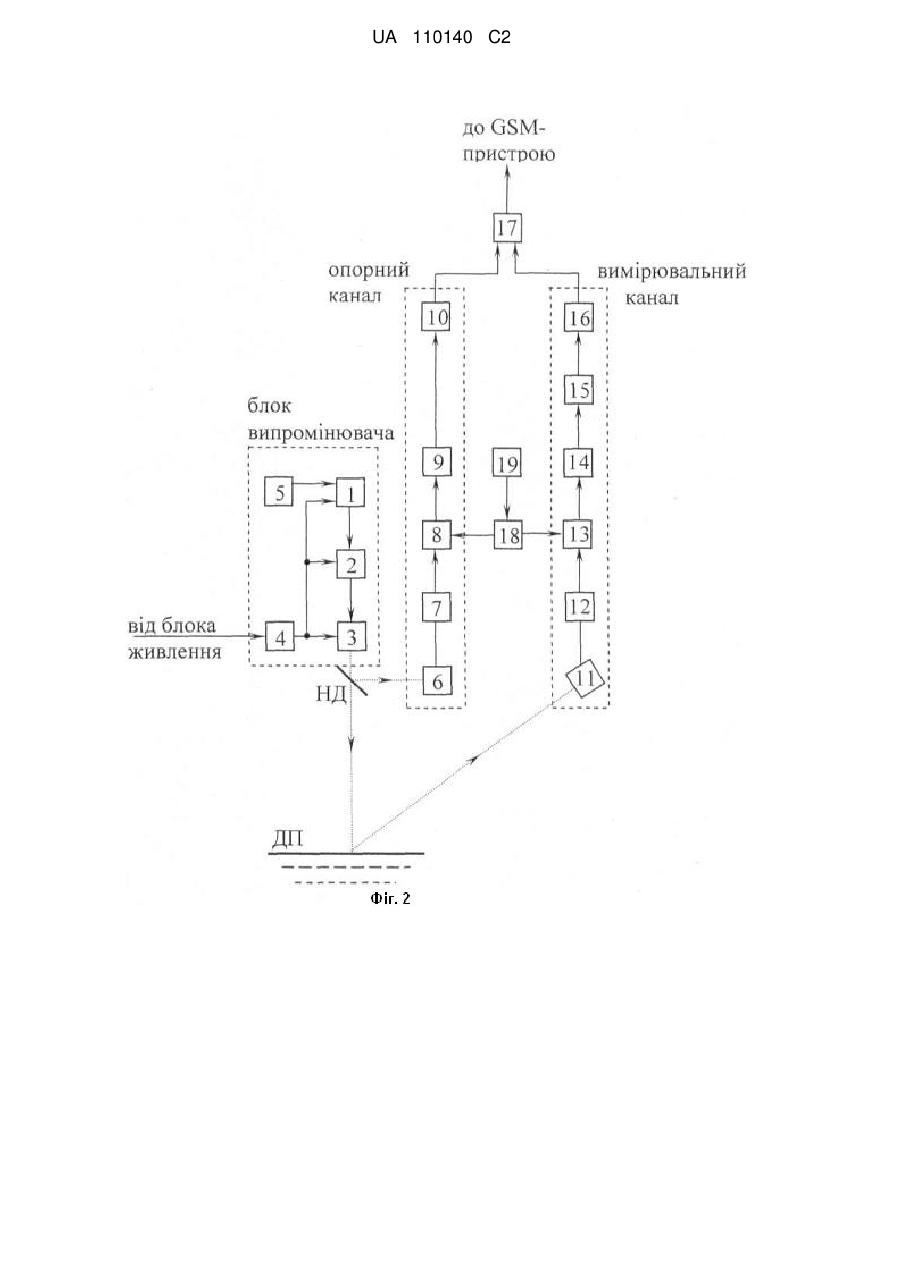
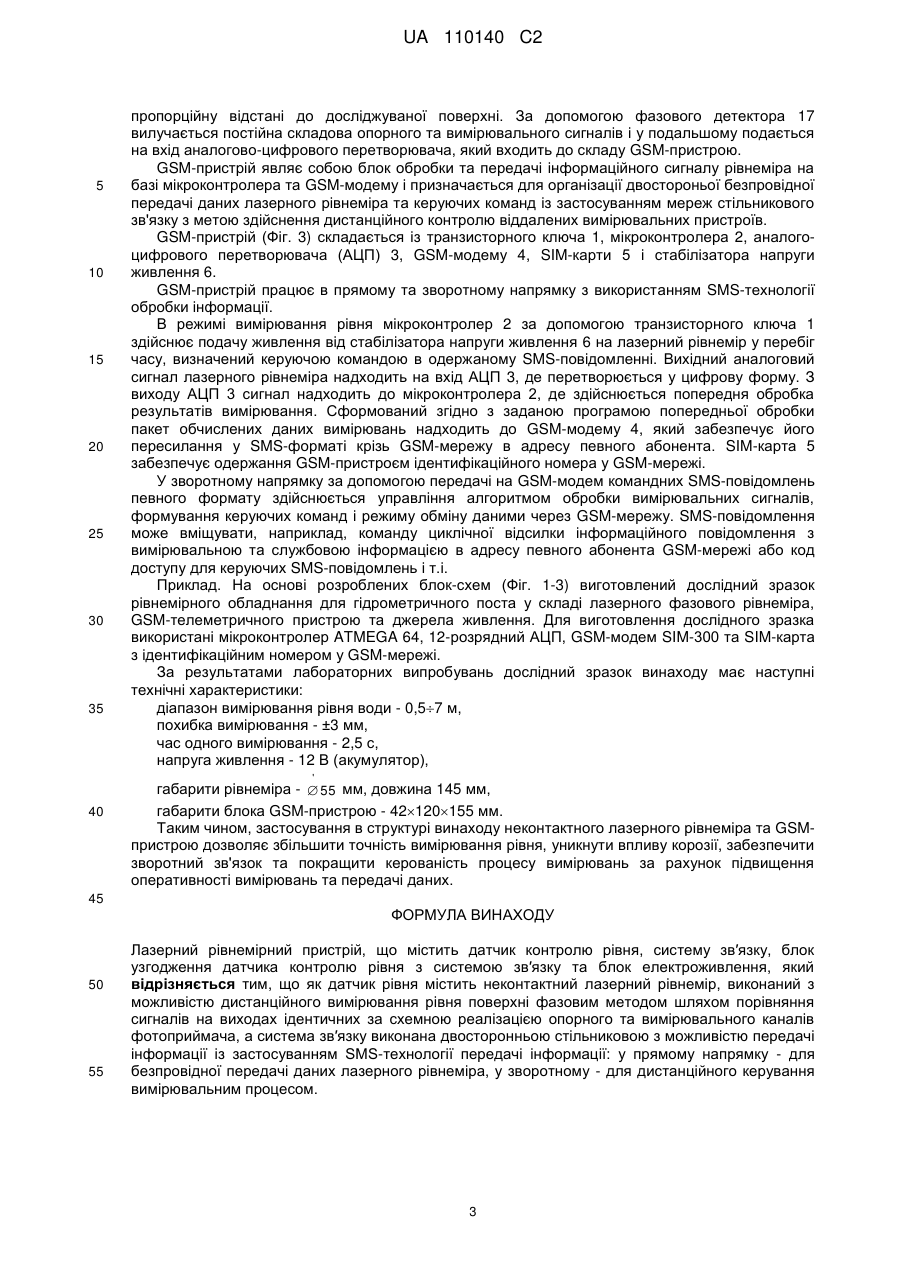
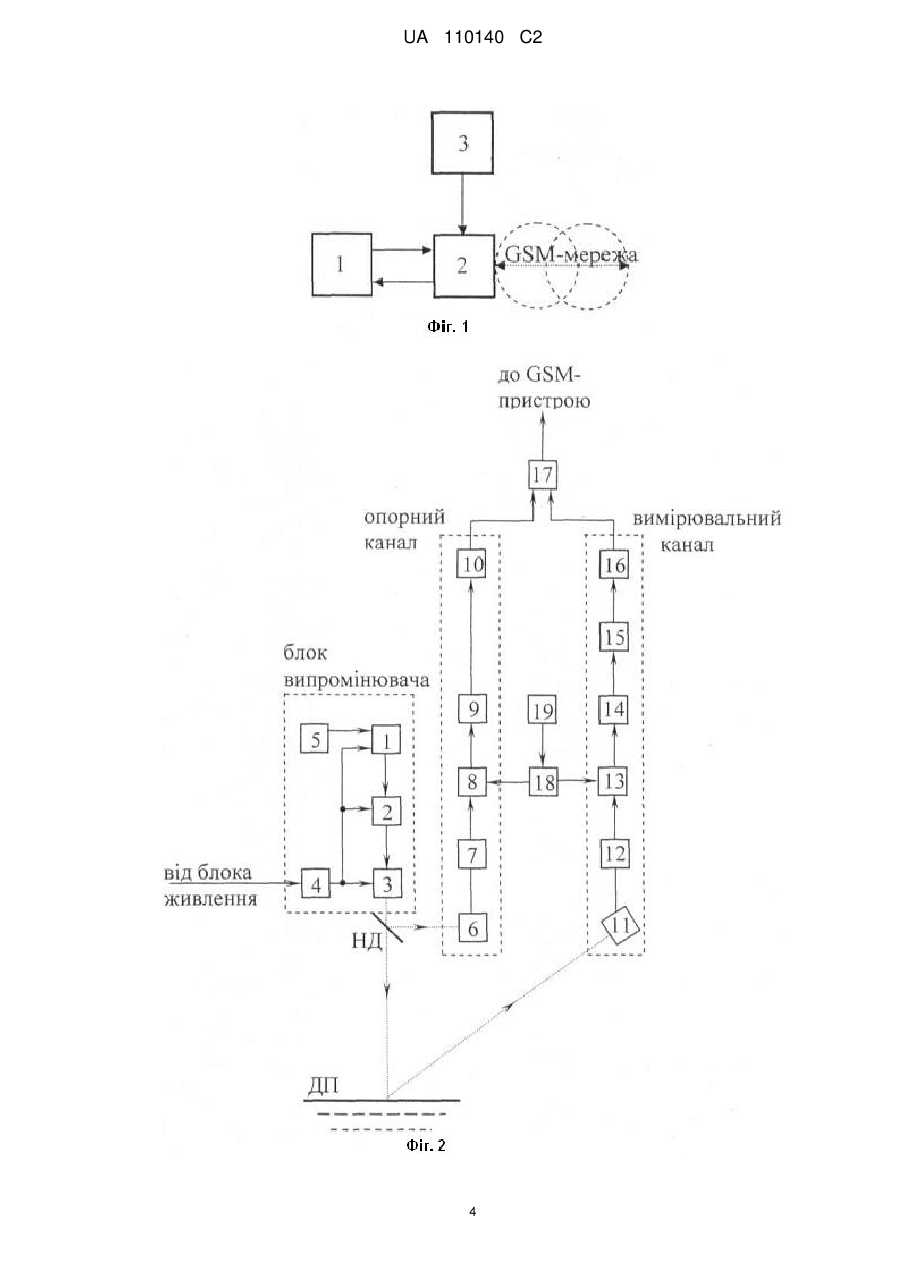
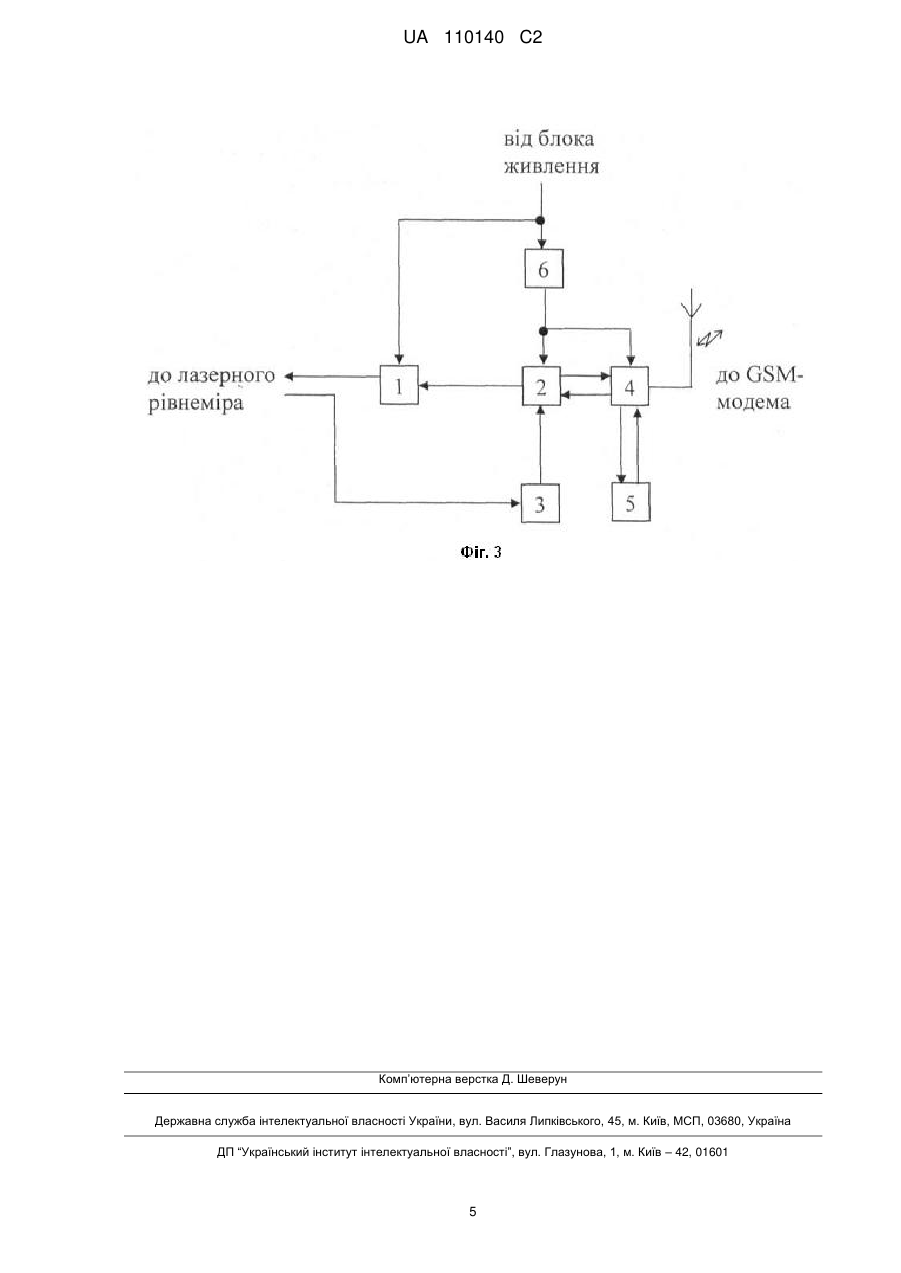
Реферат: Пристрій належить до вимірювальної техніки, зокрема до неконтактних засобів вимірювання рівня і може бути використаний для вимірювання рівня води, агресивних рідин, рідких металів, сипучих матеріалів. Лазерний рівнемірний пристрій містить датчик контролю рівня, передавач, блок узгодження датчика контролю рівня з передавачем та блок електроживлення. Як датчик рівня містить неконтактний лазерний рівнемір, виконаний з можливістю дистанційного вимірювання рівня поверхні фазовим методом шляхом порівняння сигналів на виходах ідентичних за схемною реалізацією опорного та вимірювального каналів фотоприймача. Також пристрій містить двосторонню систему стільникового зв′язку з можливістю передачі інформації із застосуванням SMS-технології обробки інформації: у прямому напрямку - для безпровідної передачі даних лазерного рівнеміра. Технічним результатом винаходу є виключення контакту елементів з поверхнею вимірюваної речовини, забезпечення зворотного зв'язку з вимірювальним пристроєм, покращення керованості вимірювального процесу за рахунок підвищення оперативності вимірювань та передачі даних, збільшення точності вимірювання рівня. UA 110140 C2 (12) UA 110140 C2 UA 110140 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до вимірювальної техніки, зокрема до неконтактних засобів вимірювання рівня і може бути використаний для вимірювання рівня води, агресивних рідин, рідких металів, сипучих матеріалів. Рівень техніки, досягнутий в даній області, показаний в наступних публікаціях. Відомий оптико-електронний рівнемір [а.с. СССР 1024740 А1, G 01 F 23/22, опубл. 23.06.83], що дозволяє вимірювати дискретні положення рівня рідини. Рівнемір складається із коліматора, двох випромінювачів, плоскопаралельної пластини, щілинної діафрагми, фотоприймальної головки та вхідного і вихідного об'єктивів. Крок дискретизації вимірюваних рівнів визначається, в основному, товщиною плоскопаралельної пластини, яка складає не менш 0,5 см. Недоліком даного рівнеміру є невисока точність вимірювання, пов'язана з його оптикогеометричними характеристиками. Відомий "Спосіб контролю рівня розплавленого матеріалу в печі і управління завантаженням шихти в піч та пристрій для його реалізації" [пат. України 14877 С1, G 01 F 23/00, опубл. 30.04.99]. Пристрій безконтактного контролю рівня розплавленого матеріалу в печі складається із джерела лазерного випромінювання, фотоприймальної двокоординатної матриці, блока обробки лазерного сигналу та блока керування завантаженням печі. Блок обробки сигналу включає два канали, кожний з яких містить смугові фільтри, підсилювач, обмежувачі рівня по максимуму та мінімуму, детектор огинаючої, суматор, ковзний інтегратор, які дозволяють одержати вірогідну інформацію про рівень матеріалу в печі. Вихід блоку обробки сигналу з'єднаний з блоком керування, який утримує послідовно з'єднані процесор, блок формування команд та блок оперативної пам'яті. Вихід блока керування з'єднаний з входом виконавчого механізму. Недоліком даного пристрою є відсутність зворотного зв'язку між блоком керування та приймально-випромінювальним блоком, що виключає можливість зовнішнього керування алгоритмом роботи вимірювального пристрою. Найближчим з відомих за технічним рішенням, взятий за прототип, є "Пристрій для контролю параметрів води" [деклар. пат. України 35984А, G 01 F 23/00, опубл. 16.04.2001]. Датчиком рівня води служить мірна рейка, обладнана електродами вздовж її довжини. Сигнали датчика рівня фіксуються як цифрові сигнали "1" при замиканні водою сусідніх електродів та "0" у відсутності води між електродами. Алгоритм обробки аналогових сигналів датчиків передбачає їх перетворення у цифрову форму в блоці прецизійних вимірювань, передачу на вхід мікроконтролера центрального керуючого пристрою (ЦКП), з виходу котрого через блок узгодження - на радіопередавач або модем провідного зв'язку. Пристрій містить блок електроживлення, з'єднаний з входами всіх блоків. Автоматичний режим обробки інформації забезпечується її програмуванням, яке включає опитування датчиків, збір сигналів, математично-логічну обробку та реєстрацію у буферній пам'яті, що має архівну, оперативну та постійну складові. У некритичних умовах зчитування та передача інформації споживачеві здійснюється на постійній основі -багаторазово за заданий термін часу. При наближенні значень параметрів до критичних або заданих значень чи при появі такої тенденції ЦКП, відповідно програмі, збільшує частоту опитування датчиків та переходить в аварійний режим передачі інформації у позачерговий термін часу. Недоліком пристрою-прототипу є застосування контактного датчика рівня з невеликою точністю вимірювання, пов'язаною з обмеженнями лінійних розмірів електродів та впливом корозійних процесів на занурені електроди при тривалому використанні, і використання провідної системи передачі інформації споживачеві без зворотного зв'язку, що виключає можливість зовнішнього керування роботою пристрою. Задача, на розв'язання якої спрямовано винахід, що пропонується, є збільшення точності вимірювання рівня, виключення впливу корозії, забезпечення зворотного зв'язку та покращення керованості процесу вимірювань за рахунок підвищення оперативності вимірювань та передачі даних. Ця задача вирішується лазерним рівнемірним пристроєм, що містить датчик контролю рівня, передавач, блок узгодження та блок живлення, який відрізняється тим, що як датчик рівня використовується неконтактний лазерний рівнемір, а для передачі інформації - двостороння система стільникового зв'язку. Загальними ознаками прототипу і запропонованого лазерного рівнемірного пристрою є наступні: прототип і запропонований пристрій містять датчик контролю рівня, передавач, блок узгодження датчика контролю рівня з передавачем і блок електроживлення. 1 UA 110140 C2 5 10 15 20 25 30 35 40 45 50 55 Відмітними ознаками запропонованого лазерного рівнемірного пристрою від прототипу є те, що як датчик рівня використовується неконтактний лазерний рівнемір, а для передачі інформації - двостороння система стільникового зв'язку. На Фіг. 1 представлена блок-схема лазерного рівнемірного пристрою, що пропонується. На Фіг. 2 показана блок-схема фазового лазерного рівнеміра. На Фіг. 3 зображена блок-схема GSM-пристрою. Лазерний рівнемірний пристрій (Фіг. 1) містить лазерний рівнемір 1, з виходу котрого аналоговий сигнал надходить на вхід GSM-пристрою 2. Рівнемірний пристрій містить також блок живлення 3, з'єднаний з GSM-пристроєм 2. Дана структура забезпечує підключення до GSM-мережі стільникового зв'язку з метою забезпечення взаємообміну інформацією між вимірювальним пристроєм і користувачами. На Фіг. 2 представлена блок-схема лазерного рівнеміра, який фазовим методом дистанційно вимірює рівень поверхні. Вона складається із трьох функціональних блоків - блока випромінювача і двох ідентичних каналів фотоприймача, опорного та вимірювального. У склад блока випромінювача входять задавальний генератор 1, підсилювач потужності 2 та випромінювач 3. Як випромінювач може використовуватися лазерний діод. Живлення у блок випромінювача надходить через лінійний стабілізатор 4. Частота задавального генератора стабілізується за допомогою кварцового резонатора 5. Опорний канал складається із фотоприймача 6, на який, за допомогою напівпрозорого дзеркала (НД), відводиться частина зондуючого оптичного сигналу випромінювача 3, резонансного підсилювача 7, помножувача 8, НЧ-фільтра 9 і підсилювача-обмежувача 10. У склад вимірювального каналу входять фотодіод 11, на який надходить відбитий від досліджуваної поверхні (ДП) оптичний сигнал, резонансний підсилювач 12, помножувач 13, НЧфільтр 14, узгоджувальний підсилювач НЧ-складової вимірювального каналу 15, підсилювачобмежувач 16. Також до складу обох каналів входить гетеродин 18, частота якого формується за допомогою кварцового резонатора 19. Виходи опорного та вимірювального каналів з'єднані з входом фазового детектора 17, в котрому вимірюється зсув початкової фази НЧ-сигналів даних каналів, прямопропорційний вимірюваній відстані. Вимірювання лазерним рівнеміром проводиться фазовим методом, що базується на непрямій реєстрації часу розповсюдження оптичного випромінювання до ДП і назад, пропорційного зсуву фаз між випроміненим та прийнятим відбитим сигналами визначеної частоти. У неперервного сигналу з гармонічною модуляцією біжуча фаза гармонічного коливання є лінійною функцією часу t 2fmt o , де fm - частота модуляції сигналу, o - початкова фаза. У свою чергу зсув фази пов'язаний з вимірюваною відстанню S до поверхні співвідношенням S /(2) c /(2f ) , де c - швидкість світла у повітрі, f - частота сигналу. Точність вимірювання відстані фазовим методом досягає декількох міліметрів [Протопопов В.В., Устинов Н.Д. Инфракрасные лазерные локационные системы. -М.: Воениздат, 1987], що значно вище, ніж у проекційно-геометричного методу. Алгоритм вимірювання реалізований у рівнемірі наступним чином. У відповідності до Фіг. 2 ВЧ-сигнал з кварцового задавального генератора 1 через підсилювач потужності 2 надходить на лазерний діод 3. Модульований за інтенсивністю оптичний сигнал з лазерного діода 3, що пройшов НД, через однолінзову оптичну систему випромінюється у напрямку ДП. Світловий сигнал, відбитий від ДП, через приймальну оптичну систему надходить на фотоприймач 11 вимірювального каналу. Одночасно оптичний сигнал, відбитий від НД, спрямовується на фотоприймач 6 опорного каналу. Підсилений по амплітуді резонансним підсилювачем 12 електричний сигнал надходить на помножувач 13. На інший вхід помножувача 13 надходить сигнал з гетеродина 18. З виходу помножувача 13 відфільтрована фільтром 14 НЧ-складова сигналу надходить на лінійний узгоджувальний підсилювач 15. З його виходу сигнал, підсилений по амплітуді, надходить на вхід підсилювача-обмежувача 16. На виході підсилювача-обмежувача 16 формується НЧ-сигнал прямокутної форми типу "меандр", початкова фаза котрого відповідає початковій фазі модульованого ВЧ-сигналом оптичного сигналу, що пройшов вимірювану відстань туди і назад. Опорний канал по схемній реалізації ідентичний вимірювальному каналу. Таким чином, на виходах опорного та вимірювального каналів формуються НЧ-сигнали прямокутної форми, початкові фази котрих зсунуті один відносно іншого на величину, 2 UA 110140 C2 5 10 15 20 25 30 35 пропорційну відстані до досліджуваної поверхні. За допомогою фазового детектора 17 вилучається постійна складова опорного та вимірювального сигналів і у подальшому подається на вхід аналогово-цифрового перетворювача, який входить до складу GSM-пристрою. GSM-пристрій являє собою блок обробки та передачі інформаційного сигналу рівнеміра на базі мікроконтролера та GSM-модему і призначається для організації двостороньої безпровідної передачі даних лазерного рівнеміра та керуючих команд із застосуванням мереж стільникового зв'язку з метою здійснення дистанційного контролю віддалених вимірювальних пристроїв. GSM-пристрій (Фіг. 3) складається із транзисторного ключа 1, мікроконтролера 2, аналогоцифрового перетворювача (АЦП) 3, GSM-модему 4, SIM-карти 5 і стабілізатора напруги живлення 6. GSM-пристрій працює в прямому та зворотному напрямку з використанням SMS-технології обробки інформації. В режимі вимірювання рівня мікроконтролер 2 за допомогою транзисторного ключа 1 здійснює подачу живлення від стабілізатора напруги живлення 6 на лазерний рівнемір у перебіг часу, визначений керуючою командою в одержаному SMS-повідомленні. Вихідний аналоговий сигнал лазерного рівнеміра надходить на вхід АЦП 3, де перетворюється у цифрову форму. З виходу АЦП 3 сигнал надходить до мікроконтролера 2, де здійснюється попередня обробка результатів вимірювання. Сформований згідно з заданою програмою попередньої обробки пакет обчислених даних вимірювань надходить до GSM-модему 4, який забезпечує його пересилання у SMS-форматі крізь GSM-мережу в адресу певного абонента. SIM-карта 5 забезпечує одержання GSM-пристроєм ідентифікаційного номера у GSM-мережі. У зворотному напрямку за допомогою передачі на GSM-модем командних SMS-повідомлень певного формату здійснюється управління алгоритмом обробки вимірювальних сигналів, формування керуючих команд і режиму обміну даними через GSM-мережу. SMS-повідомлення може вміщувати, наприклад, команду циклічної відсилки інформаційного повідомлення з вимірювальною та службовою інформацією в адресу певного абонента GSM-мережі або код доступу для керуючих SMS-повідомлень і т.і. Приклад. На основі розроблених блок-схем (Фіг. 1-3) виготовлений дослідний зразок рівнемірного обладнання для гідрометричного поста у складі лазерного фазового рівнеміра, GSM-телеметричного пристрою та джерела живлення. Для виготовлення дослідного зразка використані мікроконтролер ATMEGA 64, 12-розрядний АЦП, GSM-модем SIM-300 та SIM-карта з ідентифікаційним номером у GSM-мережі. За результатами лабораторних випробувань дослідний зразок винаходу має наступні технічні характеристики: діапазон вимірювання рівня води - 0,57 м, похибка вимірювання - ±3 мм, час одного вимірювання - 2,5 с, напруга живлення - 12 В (акумулятор), ' 40 габарити рівнеміра - 55 мм, довжина 145 мм, габарити блока GSM-пристрою - 42120155 мм. Таким чином, застосування в структурі винаходу неконтактного лазерного рівнеміра та GSMпристрою дозволяє збільшити точність вимірювання рівня, уникнути впливу корозії, забезпечити зворотний зв'язок та покращити керованість процесу вимірювань за рахунок підвищення оперативності вимірювань та передачі даних. 45 ФОРМУЛА ВИНАХОДУ 50 55 Лазерний рівнемірний пристрій, що містить датчик контролю рівня, систему зв′язку, блок узгодження датчика контролю рівня з системою зв′язку та блок електроживлення, який відрізняється тим, що як датчик рівня містить неконтактний лазерний рівнемір, виконаний з можливістю дистанційного вимірювання рівня поверхні фазовим методом шляхом порівняння сигналів на виходах ідентичних за схемною реалізацією опорного та вимірювального каналів фотоприймача, а система зв′язку виконана двосторонньою стільниковою з можливістю передачі інформації із застосуванням SMS-технології передачі інформації: у прямому напрямку - для безпровідної передачі даних лазерного рівнеміра, у зворотному - для дистанційного керування вимірювальним процесом. 3 UA 110140 C2 4 UA 110140 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюLaser level metering device
Автори англійськоюSmyntyna Valentyn Andriiovych, Lepikh Yaroslav Illich, Santonii Volodymyr Ivanovych, Ivanchenko Iraida Oleksandrivna, Budianska Liudmyla Mykhailivna
Назва патенту російськоюЛазерное уровнемерное устройство
Автори російськоюСминтина Валентин Андреевич, Лепих Ярослав Илльич, Сантоний Владимир Иванович, Иванченко Ираида Александровна, Будиянская Людмила Михайловна
МПК / Мітки
МПК: G01F 23/292
Мітки: рівнемірний, лазерний, пристрій
Код посилання
<a href="https://ua.patents.su/7-110140-lazernijj-rivnemirnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Лазерний рівнемірний пристрій</a>
Лазерний скануючий пристрій змінної потужності

Номер патенту: 13734
Опубліковано: 17.04.2006
Автор: Шевченко Віктор Леонідович
МПК: A61N 5/00
Мітки: лазерний, змінної, пристрій, скануючий, потужності
Формула / Реферат:
1. Лазерний скануючий пристрій змінної потужності, що містить лазер, оптичну систему формування паралельного пучка, електронний затвор, поворотне дзеркало, вузол юстирування, дефлектор, світловод, ендосканер, блок вимірювальних приладів, персональний комп'ютер, який відрізняється тим, що на шляху лазерних променів під кутом, що не дорівнює 90 град., встановлені один або декілька дзеркальних екранів.2. Лазерний пристрій за п. 1,...
Лазерний пристрій для транспупілярної термотерапії
Номер патенту: 55335
Опубліковано: 17.03.2003
Автори: Король Андрій Ростиславович, Риков Сергій Олександрович, Науменко Володимир Олександрович, Гаєвська Надія Сергіївна, Пасєчнікова Наталія Володимирівна
МПК: A61F 9/007
Мітки: пристрій, термотерапії, лазерний, транспупілярної
Формула / Реферат:
Лазерний пристрій для транспупілярної термотерапії, що складається з блока живлення та керування, а також встановлених на спільній основі генератора лазерного випромінювання, офтальмологічного мікроскопа та щілинного освітлювача, при цьому виходи генератора лазерного випромінювання та щілинного освітлювача через напівпрозорі призми оптично зв'язані з об'єктивом офтальмологічного мікроскопа, який відрізняється тим, що на відстані
Лазерний пристрій для офтальмології
Номер патенту: 55336
Опубліковано: 17.03.2003
Автори: Пасєчнікова Наталія Володимирівна, Сук Святослав Анатольєвич, Науменко Володимир Олександрович, Саксонов Станіслав Геннадійович, Король Андрій Ростиславович
МПК: A61F 9/007
Мітки: лазерний, офтальмології, пристрій
Формула / Реферат:
Лазерний пристрій для офтальмології, який складається з блока живлення та керування, а також встановлених на спільній основі лазерного генератора, офтальмологічного мікроскопа із додатковим окуляром та щілинного освітлювача, причому виходи лазерного генератора та щілинного освітлювача через напівпрозорі призми оптично зв'язані з об'єктивом офтальмологічного мікроскопа, перед окулярами якого встановлений непрозорий поворотний диск з чотирма...
Лазерний скануючий пристрій для рівномірного опромінювання об’єктів
Номер патенту: 6676
Опубліковано: 16.05.2005
Автор: Шевченко Віктор Леонідович
МПК: A61N 5/06
Мітки: скануючий, лазерний, опромінювання, пристрій, рівномірного, об'єктів
Формула / Реферат:
1. Пристрій для рівномірного опромінювання об'єктів при лазерній терапії людини, що включає джерело лазерного випромінювання, адаптивний оптичний вузол з елементами для створення паралельного потоку малого перерізу, блок дефлекторів, блок керування енергією лазерного випромінювання, блок керування дефлекторами за принципом двокоординатної рядкової розгортки, аналого-цифровий перетворювач, блок цифрового управління, система візуалізації, який...
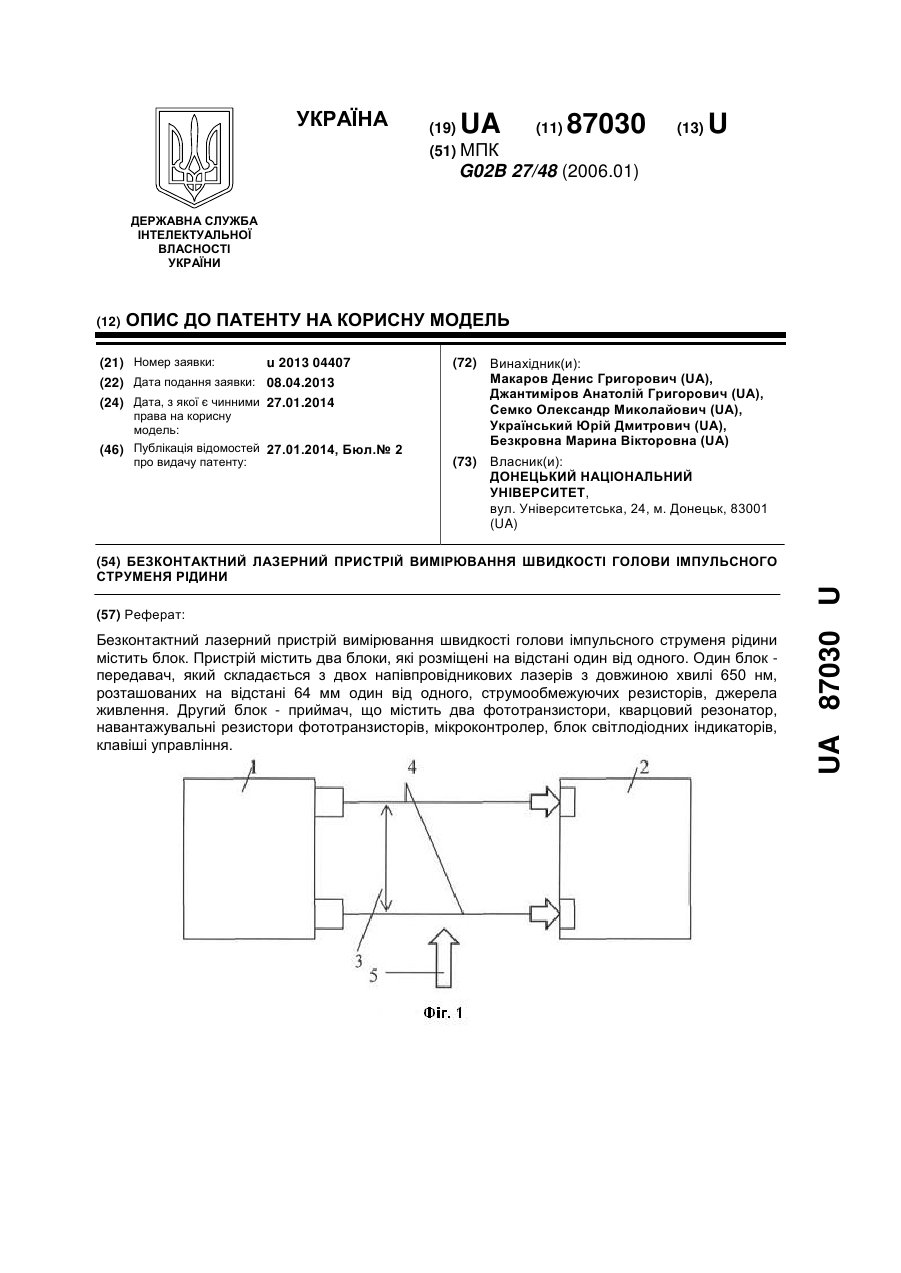
Безконтактний лазерний пристрій вимірювання швидкості голови імпульсного струменя рідини
Номер патенту: 87030
Опубліковано: 27.01.2014
Автори: Макаров Денис Григорович, Український Юрій Дмитрович, Семко Олександр Миколайович, Джантиміров Анатолій Григорович, Безкровна Марина Вікторовна
МПК: G02B 27/48
Мітки: струменя, вимірювання, пристрій, безконтактний, лазерний, рідини, голови, імпульсного, швидкості
Формула / Реферат:
Безконтактний лазерний пристрій вимірювання швидкості голови імпульсного струменя рідини, що містить блок, який відрізняється тим, що пристрій містить два блоки, які розміщені на відстані один від одного, один блок - передавач, який складається з двох напівпровідникових лазерів з довжиною хвилі 650 нм, розташованих на відстані 64 мм один від одного, струмообмежуючих резисторів, джерела живлення, другий блок - приймач, що містить два...
Попередній патент: Очисник головок коренеплодів
Наступний патент: Спосіб визначення шлуночково-перегородкового індексу серця
Випадковий патент: Комбінована система золошлаковидалення