Компенсатор прицільних радіозавад з вібраторною антеною





Формула / Реферат
Компенсатор прицільних радіозавад з вібраторною антеною, що містить приймальну антенну систему, однакові приймачі і кінцевий пристрій віднімання, який відрізняється тим, що антенна система складена з трьох однакових вертикальних вібраторів, переднього, середнього і заднього, відстань між якими дорівнює чверті довжини хвилі l/4, а кожний з вібраторів з'єднаний зі своїм приймачем, вихід приймача переднього вібратора підключений до додаткового фазообертача на p/2, а вихід приймача заднього вібратора з'єднаний з фазообертачем на -p/2, виходи вказаних фазообертачів з'єднані з першим і другим суматорами вихідних напруг фазообертачів і приймача середнього вібратора, виходи першого і другого суматорів підключені до додатково введених суматора завад і пристрою віднімання завад, вихід якого з'єднаний з третім фазообертачем на -p/2, що зв'язаний зі входом керованого підсилювача завад, а вихід керованого підсилювача завад і вихід приймача середнього вібратора з'єднані зі входами кінцевого пристрою віднімання, крім того, пристрій додатково містить обчислювач коефіцієнта підсилення Ку керованого підсилювача завад за співвідношенням
Ky =  , де
, де
![]() - амплітуди напруг завад на виходах суматора завад і пристрою віднімання завад, відповідно, входи обчислювача коефіцієнта підсилення підсилювача з'єднані з виходами суматора завад і пристрою віднімання завад, а вихід обчислювача підключений до входу управління керованого підсилювача завад.
- амплітуди напруг завад на виходах суматора завад і пристрою віднімання завад, відповідно, входи обчислювача коефіцієнта підсилення підсилювача з'єднані з виходами суматора завад і пристрою віднімання завад, а вихід обчислювача підключений до входу управління керованого підсилювача завад.
Текст
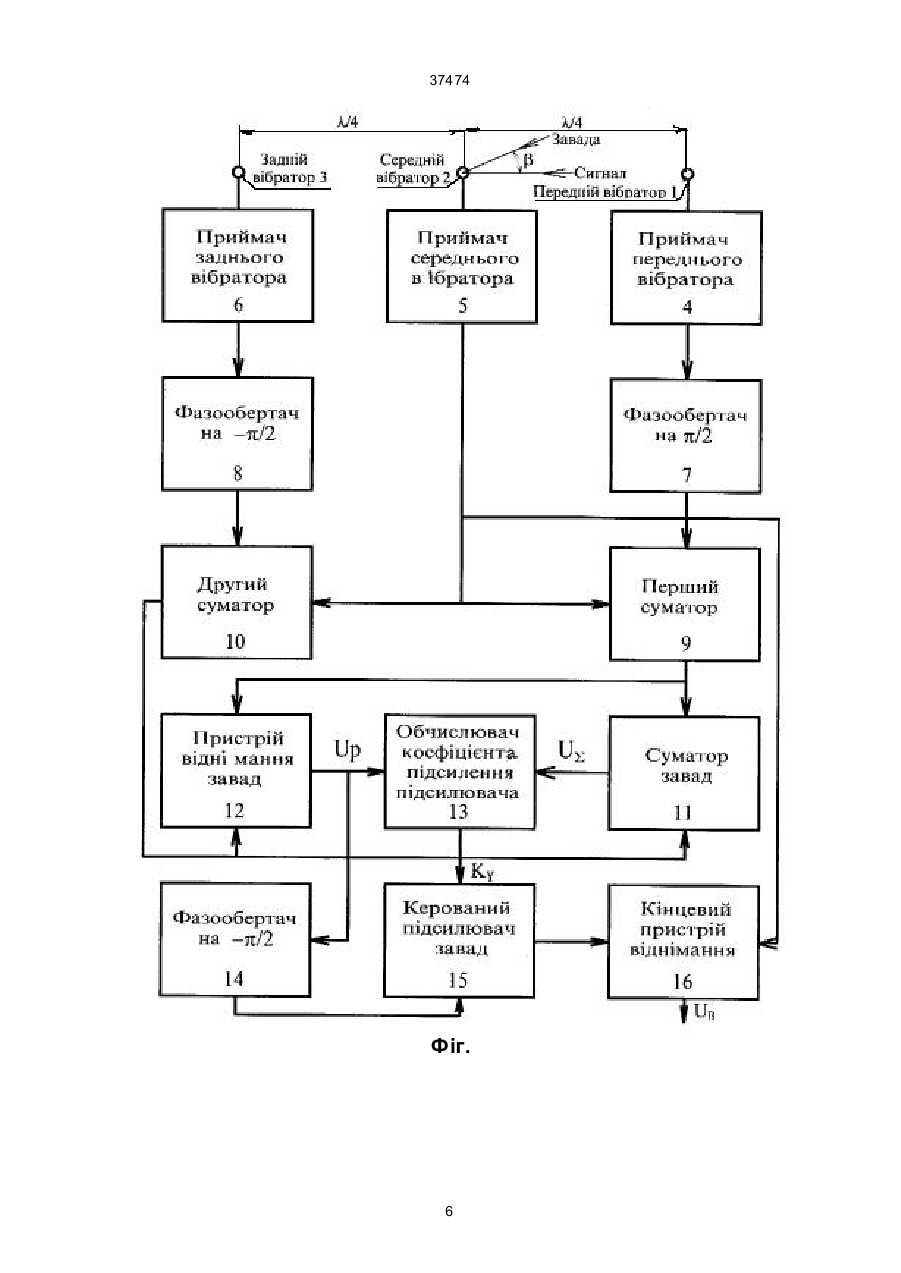
Компенсатор прицільних радіозавад з вібраторною антеною, що містить приймальну антенну систему, однакові приймачі і кінцевий пристрій віднімання, який відрізняється тим, що антенна система складена з трьох однакових вертикальних вібраторів, переднього, середнього і заднього, відстань між якими дорівнює чверті довжини хвилі l/4, а кожний з вібраторів з'єднаний зі своїм приймачем, вихід приймача переднього вібратора підключений до додаткового фазообертача на p/2, а вихід приймача заднього вібратора з'єднаний з фазообертачем на -p/2, ви ходи вказаних фазообертачів з'єднані з першим і другим суматорами вихідних напруг фазообертачів і приймача серед нього вібратора, виходи першого і другого суматорів підключені до додатково введених суматора завад і пристрою віднімання завад, вихід якого з'єднаний з третім фазообертачем на -p/2, що зв'язаний зі входом керованого підсилювача завад, а вихід керованого підсилювача завад і вихід приймача середнього вібратора з'єднані зі входами кінцевого пристрою віднімання, крім того, пристрій додатково містить обчислювач коефіцієнта підсилення Ку керованого підсилювача завад за співвідношенням 2 2 US + U p Ку = , 4U SU p Винахід відноситься до області радіотехніки і може бути використаний для захисту від прицільних радіозавад переносних зв'язкових радіостанцій з вібраторною (або штировою) антеною. Відомий адаптивний компенсатор завад для радіолокаційного приймача (Патент № 4544926 США, Int. C14 G01S 7/36. Adaptive jamming signal canceler tor radar receiver/ Dino Giuli (Италия). Claims priority, application Italy, Ma y 11, 1981 Опубликован 01.10.1985, т. 1059, № 1.). Приймальна антенна система аналога поділяє сигнали (і завади, що приймаються) на два канали у відповідності з двома взаємно ортогональними лінійними поляризаціями. У склад пристрою входять два адаптивних компенсатори і два суматори прийнятих сигналів і вихідних напруг компенсаторів. Є також компаратор, що вибирає сигнал більшої амплітуди з сигналів двох каналів компенсації завад. Недоліком цього аналога є те, що він не забезпечує захисту від завад у випадках, коли завада і сигнал не мають ортогональної поляризацій ної складової (наприклад, коли завада і сигнал мають тільки вертикальну поляризацію, а антенна система складається тільки з вертикальних вібраторів або штирів). Як прототип вибраний компенсатор завад, що приходять по бокових пелюстках діаграми спрямованості антени, для імпульсного радіолокатора (Васин В.В.. Власов О.В. и др. Радиолокационные устройства (теория и принципы построения). / Под ред. В.В Григорина-Рябова. – М.: Сов радио, 1970.– С. 518, рис. 18.21). Принцип дії прототипу оснований на відніманні завад, прийнятих основним і компенсаційним каналом, а віднімання здійснюють за допомогою приладу віднімання на відеочастоті. Прототип містить передавальну антену, дзеркально зв'язану з приймачем основного каналу, та приймальну рупорну антену, зв'язану з приймачем компенсаційного каналу Компенсаційна антена має широку діаграму спрямованості і охоплює бокові пелюстки основної антени. На виході амплітудних детекторів приймачів встановлений (19) UA (11) 37474 (13) A де: US,Up – амплітуди напруг завад на виходах суматора завад і пристрою віднімання завад, відповідно, входи обчислювача коефіцієнта підсилення підсилювача з'єднані з виходами суматора завад і пристрою віднімання завад, а вихід обчислювача підключений до входу управління керованого підсилювача завад. 37474 пристрій віднімання відеосигналів, вихід якого зв'язаний з індикатором радіолокатора. Рівень завад у компенсаційному каналі трохи більший, ніж в основному. Тому при відніманні завади, прийняті по бокових пелюстках діаграми спрямованості основного каналу, будуть повністю придушені. Для встановлення необхідного рівня завад у компенсаційному каналі використаний обмежувач знизу. Основна антена прототипу використовується також для випромінювання зондуючого імпульсного сигналу при передачі, а радіолокатор містить також імпульсний передавач та антенний перемикач Рівень корисного сигналу в основній антені більший ніж її компенсаційній. Тому при відніманні корисний сигнал залишиться, а завада буде придушена. Недоліком прототипу є те, що він не забезпечує за хисту від завад, коли приймальна антенна система не направлена по азимуту і виконана, наприклад, з вертикальних вібраторів. Прототип не можна використати, наприклад, для захисту від прицільних радіозавад переносної зв'язкової радіостанції зі штировою антеною. В основу винаходу поставлено задачу вдосконалення компенсатора прицільних радіозавад. шляхом виконання приймальної антенної системи з трьох вертикальних вібраторів, зв'язаних зі своїми приймачами, і за рахунок використання в компенсаційному каналі постійних фазообертачів, суматорів, пристрою віднімання завад та керованого підсилювача з лічильником його коефіцієнта підсилення забезпечити відсутність корисного сигналу у компенсаційному каналі, синфазність та однаковість рівнів завад в основному та компенсаційному каналі і ефективне придушування завад на виході кінцевого пристрою віднімання при довільних співвідношеннях рівнів і будь-якій тимчасовій структурі завади та сигналу. Поставлене завдання вирішується тим, що в компенсаторі прицільних радіозавад з вібраторною антеною, що містить приймальну антенну систему, однакові приймачі і кінцевий пристрій віднімання, згідно винаходу антенна система виконана з трьох однакових вертикальних вібраторів, відстань між якими дорівнює чверті довжини хвилі l/4, а кожний з вібраторів зв'язаний зі своїм приймачем; на виході приймача переднього вібратора додатково встановлений фазообертач на p/2. а на виході приймача останнього вібратора встановлений фазообертач на - p/2; на виходах цих фазообертач встановлені перший і другій суматори вихідних напруг фазообертач і напруги з виходу приймача середнього вібратора; на виходах ци х суматорів додатково встановлені суматор завад і пристрій віднімання завад, на виході якого встановлений третій фазообертач на -p/2, зв'язаний зі входом керованого підсилювача завад, а вихід цього підсилювача і вихід приймача середнього вібратора зв'язані зі входами кінцевого пристрою віднімання; у склад пристрою додатково включений обчислювач коефіцієнта підсилення Ку керованого підсилювача завад за співвідношенням Ку = 2 2 US + U p 4U SU p , (1) де US, Up – амплітуди напружень завад на виходах суматора завад і пристрою віднімання завад відповідно. Входи цього обчислювача зв'язані з виходами суматора завад і пристрою віднімання завад, а вихід обчислювача зв'язаний зі входом управління керованого підсилювача завад. При цьому вважається, що корисний сигнал приходить з напряму вздовж лінійки трьох вібраторів, а завада приходить з іншого напряму. Принцип дії пристрою оснований на компенсації завад основного і компенсаційного каналів за допомогою кінцевого пристрою віднімання на проміжній (або високій) частоті приймачів до амплітудного детектора. В основному каналі прийому використаний середній вібратор зі своїм приймачем. Запропонована схема компенсаційного каналу забезпечує відсутність корисного сигналу у компенсаційному каналі і синфазність завад в основному і компенсаційному каналах. Амплітуди завад в основному і компенсаційному каналах вирівнюють за допомогою керованого підсилювача завад, а коефіцієнт підсилення нього підсилювача визначають за відношенням амплітуд завад в сумарному та різницевому каналах завад. Запропонований пристрій дозволяє захищати приймальну систему з вібраторною ненаправленою по азимуту антеною від прицільних радіозавад при будь-яких співвідношеннях рівнів завади і сигналу. Для цього необхідною є відмінність напрямків приходу сигналу і завади, але не є обов'язковою відмінність їх часових структур. Кінцевий пристрій віднімання буде придушувати заваду, але не буде придушувати корисного сигналу, бо у компенсаційному каналі корисний сигнал буде відсутній. Технічна сутність і принцип дії запропонованого пристрою пояснюються фіг. 1, де представлена спрощена структурна схема запропонованого компенсатора прицільних радіозавад. У склад запропонованого пристрою на схемі фіг. 1 входять наступні основні елементи: передній 1, середній 2 і задній 3 однакові приймальні вібратори (симетричні вертикальні вібратори або штирі); однакові приймачі 4, 5, 6 переднього, середнього і кінцевого вібраторів відповідно (наприклад, супергетеродинні приймачі зі спільним гетеродином); постійний фазообертач 7 на p/2 вихідної напруги приймача 4 переднього вібратора на високій або проміжній частоті приймача; постійний фазообертач 8 на -p/2 вихідної напруги приймача 6 кінцевого вібратора на високій або проміжній частоті приймача; перший 9 і другий 10 суматори вихідної напруги приймача 5 середнього вібратора і вихідних напруг фазообертач 7, 8 відповідно (на виходах цих суматорів корисний сигнал буде відсутній, а присутні тільки завади); суматор завад 11 з виходів першого 9 і др угого 10 суматорів; 2 37474 пристрій віднімання завад 12 з виходів першого 9 і друго го 10 суматорів; обчислювач 13 коефіцієнта підсилення Ку компенсаційного керованого каналу підсилювача по відношенню амплітуд завад US/Up на ви ходах сумарного і різницевого каналів завад за допомогою співвідношення (1); постійний фазообертач 14 на -p/2 напруги завади з виходу пристрою віднімання завад 12; керований підсилювач завад 15 (коефіцієнт підсилення цього підсилювача Ку встановлюють автоматично за результатами його обчислення лічильником 13 для чого результат обчислення подають на вхід управління цього підсилювача); кінцевий пристрій віднімання 16 (на виході цього пристрою завада основного каналу прийому буде придушена завадою компенсаційного каналу з виходу керованого підсилювача 15). Нижче пояснюється принцип дії запропонованого пристрою і обгрунтовуються його істотні відмітні ознаки. Запропонований пристрій призначений для захисту від прицільної завади приймальної системи (наприклад, приймача зв'язкової УКВ радіостанції зі штировою антеною, що не має напрямленням у горизонтальній площині). Антенна система виконана з трьох однакових вертикальних вібраторів (штирів), рознесених один від одного вздовж траси розповсюдження сигналу на відстань, що дорівнює чверті довжини хвилі l/4. Кожний вібратор зв'язаний зі своїм приймачем, а всі три приймачі однакові. Сигнал приходить з напряму вздовж лінійки трьох вібраторів, а завада приходить з іншого напрямку під азимутальним кутом b. Різниця напрямків приходу завади і сигналу принципово необхідна для забезпечення можливості придушення завад у запропонованому автокомпенсаторі. Як антена основного каналу прийому використаний середній вібратор 2, а передній 1 і останній 3 вібратори використані у компенсаційному каналі. Придушення завади основного каналу прийому здійснюють за допомогою кінцевого пристрою віднімання 16, який віднімає заваду з виходу компенсаційного каналу від завади, що приймається та сигналу основного каналу. Для цього необхідно, щоб у компенсаційному каналі корисний сигнал був відсутній, а завади в основному і компенсаційному каналах були синфазні і однакові за рівнем. Запропонована схема автокомпенсатора забезпечує виконання цієї умови. При цьому вирівнювання рівнів синфазних завад в основному і компенсаційному каналах здійснюють за допомогою керованого підсилювача завад 15, а синфазність завад і відсутність корисного сигналу у компенсаційному каналі забезпечені запропонованою схемою і постійними фазообертачами. Для обгрунтування можливості практичної реалізації запропонованого пристрою і його істотних відмітних ознак нижче приводяться необхідні математичні співвідношення. Вважається, що сигнал приходить з напряму вздовж лінійки вібраторів, а завада приходить з іншого напряму під азимутальним кутом b і частота сигналу співпадає з частотою завади. При цьому для комплексних амплітуд сумарних напруг завади і сигналу на виходах однакових приймачів 4, 5, 6 переднього, середнього і останньою вібра& & & торів U1 ,U 2 ,U 3 можна записати співвідношення æ & & U1 = Uc exp ç j pö æ p ö & ÷ + Uп exp ç j cos b ÷ , ( 2) 2ø 2 è è ø & & & U2 = U c + U п , ( 3) æ pö & æ p ö & & U3 = Uc exp ç - j ÷ + U п exp ç - j cos b ÷, (4 ) è 2ø è 2 ø & & Де Uc , Uп – комплексні амплітуди напруг сигналу і завади на виході приймача 5 середнього вібратора, b – азимутальний кут приходу завади. Співвідношення (2-4) отримані, виходячи з геометрії антенної системи на фіг. 1, з ура хуванням того, що всі вібратори, їх фідерні лінії та приймачі однакові. Постійні фазообертач 7, 8 змінюють фази напруг сигналу і завади, що приймаються. В результаті для комплексних амплітуд вихідних напруг & & U S1, U S 2 на виходах першого 9 і другого 10 суматорів відповідно на основі співвідношень (2-4) можна записати вирази ì é & & US1 = Uп í1 + exp j ê & US 2 p (1 + cos b)ù ü, (5) úý ë 2 ûþ î é p ùü & ì = Uп í1 + exp - j (1 + cos b ) ý.(6 ) ê 2 úþ ë û î З виразів (5), (6) видно, що на виходах першого 9 і другого 10 суматорів корисний сигнал буде відсутній, а присутні тільки завади. Отже, запропонована геометрія антенної системи, постійні фазообертачі 7, 8 і суматори 9, 10 необхідні для того, щоб забезпечити відсутність корисного сигналу у компенсаційному каналі прийому. Для роботи запропонованого автокомпенсатора необхідно також забезпечити синфазність завад в основному та компенсаційному каналах. Це завдання виконують пристрої віднімання завад 12 і постійний фазообертач 14. За допомогою виразів (5), (6) можна записати наступне співвідношення & для комплексної амплітуди напруги U p на виході пристрою віднімання завад 12: é & & & & U p = U S1 - U S 2 = j2 U п sin ê p (1 + cos b)ù.(7 ) ú ë2 û За співвідношень (3), (7) видно, що напруга & завади U p на виході пристрою віднімання 12 випереджає по фазі напругу завади в основному каналі на p/2. Для забезпечення синфазності завад в основному і компенсаційному каналах слід & змінити фазу напруги U p на -p/2. Це завдання виконує постійний фазообертач 14, а його вихідна напруга використовується далі у компенсаційному каналі. Отже, пристрій віднімання завад 12 і постійний фазообертач 14 необхідні для забезпечення синфазності завад в основному і компенсаційному каналах прийому. 3 37474 Для придушення завад у запропонованому автокомпенсаторі необхідно також забезпечити рівність рівнів завад в основному і компенсаційному каналах. Це завдання виконує керований підсилювач завад 15. Вважається, що цей підсилювач не змінює фази підсилюваної напруги завади. Для визначення і автоматичної установки необхідного коефіцієнта підсилення Ку цього підсилювача додатково використовують суматор завад 11 і обчислювач 13. Зі співвідношень (3), (7) видно, що для вирівнювання рівнів завад в основному і компенсаційному каналах коефіцієнт підсилення цього підсилювача Kv повинен бути рівний Ку = 1 é p (1 + cos b )ù 2 sin ê2 ú ë û . неспрямовані по азимуту вібраторні антени. Відомі автокомпенсатори для ефективного придушення завад підчас вимагають наявності обов'язкової часової та просторової різниці завади і сигналу і використання основної антени з вузькою діаграмою спрямованості Тому запропонований пристрій має істотні переваги у порівнянні з відомими. Таким чином, запропонований пристрій може бути практично реалізований та усуває недоліки аналога і прототипу, а відзначені вище відмітні ознаки є істотними і принципово необхідні для реалізації пристрою. Основні елементи запропонованого пристрою на схемі фіг. виконані так. Антенна система виконана з трьох однакових вертикальних вібраторних антен (або штирів), рознесених вздовж траси розповсюдження радіохвиль на чверть довжини хвилі l/4 і такий, що мають фідерні лінії однакової довжини. Приймачі 4, 5, 6 однакові і можуть бути виконані у вигляді супергетеродинних приймачів із спільним гетеродином, який на схемі фіг. 1 не показаний. Амплітудне обмеження завад і сигналів в приймачах є недопустимим, тому слід використовувати приймачі з широким динамічним діапазоном. Постійні фазообертачі 7, 8, 14 мають відому конструкцію і можуть бути виконані, наприклад, у вигляді відрізків лінії передачі. Суматори 9, 10, 11 та пристрої віднімання 12, 16 мають відому конструкцію. Ці елементи не повинні змінювати фазу напруг. Обчислювач 13 являє собою мікро ЕОМ для обчислення коефіцієнта підсилення Ку керованою підсилювача завад 15 за співвідношенням (1) і виміряним значенням амплітуд US, U р напруг завад в сумарному і різницевому каналах завад. Алгоритм обчислень може бути легко реалізований в реальному масштабі часу. Керований підсилювач завад 15 має відому конструкцію. На вхід управління цього підсилювача подають напругу, пропорційну коефіцієнту підсилення Kу, обчисленому лічильником 13. Цей підсилювач не повинен змінювати фазу напруги завад, що підсилюються. Слід відзначити, що всі елементи запропонованого автокомпенсатора (крім антенної системи і приймачів) можуть бути реалізовані на цифрових елементах обчислювальної техніки. Для цього на виходах приймачів 4, 5, 6 слід використати аналогово-цифрові перетворювачі. Динаміка роботи запропонованого пристрою здійснюється так. Антенна система приймає корисний сигнал з напряму вздовж лінійки трьох вібраторів і заваду з іншого напряму. Сигнали і завади підсилюють і перетворюють на проміжну частоту з допомогою трьох однакових приймачів 4, 5, 6, фазообертачі 7, 8 змінюють фазу вихідних напружень приймачів 4, 6 на p/2. Перший 9 і другий 10 суматори додають вихідну напругу приймача 5 основного каналу прийому до вихідних напруг фазообертач 7, 8. В результаті на ви ходах суматорів 9, 10 корисний сигнал буде відсутній, а будуть тільки напруги завад. Вихідні напруги завад з виходів першого 9 і другого 10 суматорів складаються суматором завад 11 і віднімаються пристроєм віднімання завад 12. За амплітудами напружень завад сумарною і різницевою каналу US, Uр визначають коефіцієнт підсилення Ку керованого підсилювача завад 15 за допомогою обчислювача 13 по формулі (1) і автоматично встановлюють відповідне (8) У співвідношенні (8) азимутальний кут приходу завади звичайно не відомий. Тому для визначення коефіцієнта підсилення Ку пропонується використати значення амплітуд напруг завад US, Up з виходів суматора завад 11. Із співвідношень (5), (6) можна одержати наступний вираз для амплітуди напруги завад US на виході суматора завад 11 & & & U S = U S1 + U S 2 = 2 U п ì ép ùü í1 + cos ê (1 + cos b )ú ý .(9 ) ë2 ûþ î Із співвідношень (7), (9) можна одержати наступний вираз для відношення амплітуд напружень завад Up/ US на виходах різницевого та сумарного каналів завад Up US ép ù ê 2 (1 + cos b )ú ë û . = p é ù 1 + cos ê 2 (1 + cos b )ú ë û sin (10) З формул (8), (10) отримано співвідношення (1), яке рекомендується використовува ти для визначення коефіцієнта підсилення Ку керованого підсилювача завад 15. Отже, суматор завад 11, обчислювач 13 і керований підсилювач завад 15 необхідні для забезпечення вирівнювання рівня завад в основному і компенсаційному каналах. З формули (8) видно, що при збігу напрямків приходу сигналу і завади (b = 00) запропонований автокомпенсатор не буде придушувати заваду, бо необхідний коефіцієнт підсилення Ку керованого підсилювача 15 перетворюється при цьому в нескінченність. Необхідний коефіцієнт підсилення Ку тим менший, чим більша різниця напрямків приходу сигналу і завади, а при азимуті приходу завади b = 900 коефіцієнт підсилення рівнин Ку = 1/2. Тобто для роботи пристрою принципово необхідна відмінність азимутальних кутів приходу сигналу і завади, а при дуже малих відмінностях цих кутів автокомпенсатор малоефективний. За наявності різниці у напрямках приходу завади і сигналу запропонований автокомпенсатор забезпечує ефективний захист від прицільних радіозавад на несучій частоті сигналу при будь-яких співвідношеннях рівнів завади і сигналу в межах динамічного діапазону приймачів і будь-якій часовій структурі завади і сигналу. При цьому не є обов'язковою відмінність часових структур завади і сигналу, а як антенну систему можна використати 4 37474 значення коефіцієнта підсилення цього підсилювача. Фазоперевертувач 14 змінює фазу напруги завад з виходу пристрою віднімання завад 12 на p/2 і завдяки цьому забезпечує син фазність завад в основному і компенсаційному каналах прийому. Керований підсилювач 15 підсилює напругу завад з виходу фазообертача 14 і забезпечує рівність рівнів завад в основному і компенсаційному каналах. Кінцевий пристрій віднімання 16 віднімає від вихідної напруги приймача 5 основного каналу заваду з виходу керованого підсилювача завад 15. В результаті на виході кінцевого пристрою віднімання 16 завада буде пpидушена, а корисний сигнал виділений. Таким чином, запропонований пристрій вирішує поставлену задачу, усуває недоліки аналога і прототипу і забезпечує ефективний захист приймальної системи від прицільних радіозавад на несучій частоті сигналу при будь-яких співвідношеннях рівнів завади і сигналу. При цьому для ефективної роботи пристрою достатньо лише просторової різниці завади і сигналу і не є обов'язково потрібною різниця їх часової стр уктури, що значно розширює можливості запропонованого автокомпенсатора у порівнянні з відомими. Антенна система автокомпенсатора може бути реалізована з простих вібраторних антен, що не мають спрямованості в азимутальній площині. 5 37474 Фіг. 6 37474 _________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 7
ДивитисяДодаткова інформація
Назва патенту англійськоюCompensator of aimed radio-noise with vibrator antenna
Автори англійськоюTarokhtei Valerii Petrovych
Назва патенту російськоюКомпенсатор прицельных радиопомех с вибраторной антенной
Автори російськоюТарохтей Валерий Петрович
МПК / Мітки
МПК: G01S 7/36
Мітки: вібраторною, радіозавад, компенсатор, антеною, прицільних
Код посилання
<a href="https://ua.patents.su/7-37474-kompensator-pricilnikh-radiozavad-z-vibratornoyu-antenoyu.html" target="_blank" rel="follow" title="База патентів України">Компенсатор прицільних радіозавад з вібраторною антеною</a>
Радіолокатор з пристроєм захисту від прицільних завад
Номер патенту: 32190
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Бахвалов Валентин Борисович, Кудрик Андрій Миколайович
МПК: G01S 7/36
Мітки: завад, пристроєм, прицільних, захисту, радіолокатор
Текст:
...засновано на управлінні поляризацією випромінюваних і приймальних сигналів таким чином, щоб поляризаційні параметри сигналу суттєво відрізнялися від виміряних поляризаційних характеристик завад, що ускладнює попадання завад в основний канал прийому. Технічна сутність і принцип дії запропонованого пристрою пояснюються фіг. 1,2. На фіг. 1 дана спрощена структурна схема запропонованого радіолокатора. На фіг.2 показаний спрощений ескіз...
Радіолокатор з пристроєм компенсації завад відніманням
Номер патенту: 32194
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Кудрик Андрій Миколайович, Пророшин Сергій Михайлович
МПК: G01S 7/36
Мітки: пристроєм, компенсації, завад, відніманням, радіолокатор
Текст:
...(в тому числі і кругової) поляризації навіть за відсутністю просторових і часових відмінностей завади і сигналу. Поставлена задача вирішується тим, що в радіолокаторі з пристроєм компенсації завад відніманням, що містить антенну систему, антенний перемикач і пов'язаний з ним передавач імпульсного сигналу, приймач сигналу, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана у вигляді рупорно-параболічної антени з...
Радіолокатор з компенсатором завад по бокових пелюстках діаграми спрямування антени
Номер патенту: 32192
Опубліковано: 15.12.2000
Автори: Кудрик Андрій Миколайович, Пророшин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 7/36
Мітки: спрямування, компенсатором, діаграми, пелюстках, антени, завад, бокових, радіолокатор
Текст:
...з компенсатором завад по бокових пелюстках діаграми спрямування антени, що містить антенну систему з основної приймально-передавальної антени з антенним перемикачем і компенсаційну приймальну антену, передавач імпульсного сигналу, приймачі, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана з однакових рознесених вздовж осі системи антен, перша з яких є основною, а друга - компенсаційною; до складу...
Вихрострумовий компенсатор зміни зазору
Номер патенту: 31439
Опубліковано: 15.12.2000
Автори: Криничний Петро Якович, Молодецький Ігор Анатолійович
МПК: G01N 27/90
Мітки: компенсатор, зміни, вихрострумовий, зазору
Текст:
...прямокутних імпульсів 4, попередній підсилювач 5, амплітудний обмежувач 6, підсилювач 7, перетворювач "амплітудачасовий інтервал" 8 і друга частина, що забезпечує регулювання коефіцієнта підсилення в залежності від величини сигналу керування і включає в себе коректор 9, фоторезистивний оптрон 10, а також керований підсилювач 11. Вихрострумовий компенсатор працює наступним чином. Генератор 4 генерує прямокутні імпульси з частотою...
Радіолокатор з пристроєм компенсації завад
Номер патенту: 32193
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Бахвалов Валентин Борисович, Кудрик Андрій Миколайович
МПК: G01S 7/36
Мітки: завад, радіолокатор, компенсації, пристроєм
Текст:
...пристрої використовуються поляризаційні відмінності завади і луна-сигналу цілі. Випромінюється зондуючий сигнал горизонтальної поляризації і луна-сигнал цілі також має в основному горизонтальну поляризацію. Припускається, що завада має лінійну поляризацію і містить як горизонтальну, так і вертикальну складові поля. Фази цих складових однакові, а амплітуди можуть відрізнятися, але не дуже сильно. Запропонований пристрій призначений для...
Попередній патент: Вертолітний радіолокаційний міношукач
Наступний патент: Спосіб підготовки системи для вливання кровозамінників або інфузійних розчинів
Випадковий патент: Спосіб діагностики перетренованості у спортсменів