Система для обертання продуктів, що мають неправильну геометричну форму, система для транспортування продуктів та спосіб обертання продукту

Формула / Реферат
1. Система для обертання продуктів (11), що мають неправильну геометричну форму, яка включає:
- обертальну систему, яка має утримувальну частину і засоби (8) для обертання утримувальної частини, а отже, утримуваного продукту (11), на індивідуально визначений кут обертання навколо осі обертання,
- засоби для визначення орієнтації кожного продукту (11) при його надходженні до системи, і
- контролюючу систему обертальної системи, яка з'єднана оперативно з засобами визначення кута обертання на основі вищезазначеної орієнтації, яка відрізняється тим, що
утримувальна частина має множину індивідуально рухомих стрижнів (2), що пристосовані для захоплення продукту (11), фіксуючи у такий спосіб принаймні практично продукт (11) відносно утримувальної частини, які розташовані у такий спосіб, що їх кінцеві частини утворюють конфігурацію, яка включає принаймні частину принаймні одного кола.
2. Система за п. 1, у якій всі стрижні (2) рухомі у принаймні практично взаємно паралельних напрямках.
3. Система за п. 2, у якій вісь обертання є принаймні практично паралельною напрямку руху стрижнів (2).
4. Система за будь-яким із пп. 1-3, у якій стрижні (2) розташовані у такий спосіб, що їх кінцеві частини утворюють конфігурацію, яка включає принаймні частини принаймні двох принаймні практично концентричних кіл.
5. Система за будь-яким із пп. 1-4, яка додатково має засоби для переміщення стрижнів (2).
6. Система за п. 5, у якій засоби для переміщення стрижнів (2) пристосовані для переміщення кожного зі стрижнів (2) у принаймні практично вертикальному напрямку.
7. Система за п. 6, у якій засоби для переміщення стрижнів (2) мають кінцеву частину, змонтовану на кожному зі стрижнів (2), та принаймні одну підйомну частину, яка пристосована для зачеплення принаймні кінцевих частин для переміщення принаймні стрижнів (2).
8. Система за будь-яким із пп. 5-7, у якій засоби для переміщення стрижнів (2) мають принаймні один привід.
9. Система за будь-яким із пп. 1-8, у якій утримувальна частина додатково має засоби (1) для контролю орієнтації стрижнів (2).
10. Система за п. 9, у якій засоби (1) для контролю орієнтації стрижнів (2) пристосовані для утримання стрижнів (2) у принаймні практично вертикальній орієнтації.
11. Система за будь-яким із пп. 1-10, яка додатково має конвеєр (9), який розташований під обертальною системою, пристосованою для опускання на продукт (11), що надходить.
12. Система за будь-яким із пп. 1-11, у якій засоби для визначення орієнтації кожного продукту (11) включають оптичні засоби.
13. Система за п. 12, у якій оптичні засоби включають камеру.
14. Система для транспортування продуктів, що включає систему за будь-яким із пп. 1 -13, принаймні один конвеєр, розташований вище відносно системи, і принаймні один конвеєр, розташований нижче відносно системи.
15. Система для транспортування продуктів за п. 14, яка складає частину виробничої лінії.
16. Спосіб для обертання продукту, який включає стадії:
- визначення орієнтації продукту,
- порівняння орієнтації продукту з необхідною орієнтацією, виходячи із вищезазначеного порівняння, визначення кута обертання, що потрібен для одержання необхідної орієнтації,
- переміщення утримувальної частини, яка має множину стрижнів, до зачеплення з продуктом, з фіксацією у такий спосіб принаймні практично продукту відносно утримувальної частини, при цьому стрижні (2) розташовані у такий спосіб, що їх кінцеві частини утворюють таку конфігурацію, яка включає принаймні частину принаймні одного кола, і
- обертання утримувальної частини згідно з кутом обертання, з обертанням у такий спосіб продукту згідно з кутом обертання.
17. Спосіб за п. 16, у якому стадію визначення орієнтації продукту здійснюють за допомогою методів на основі технічного зору.
Текст
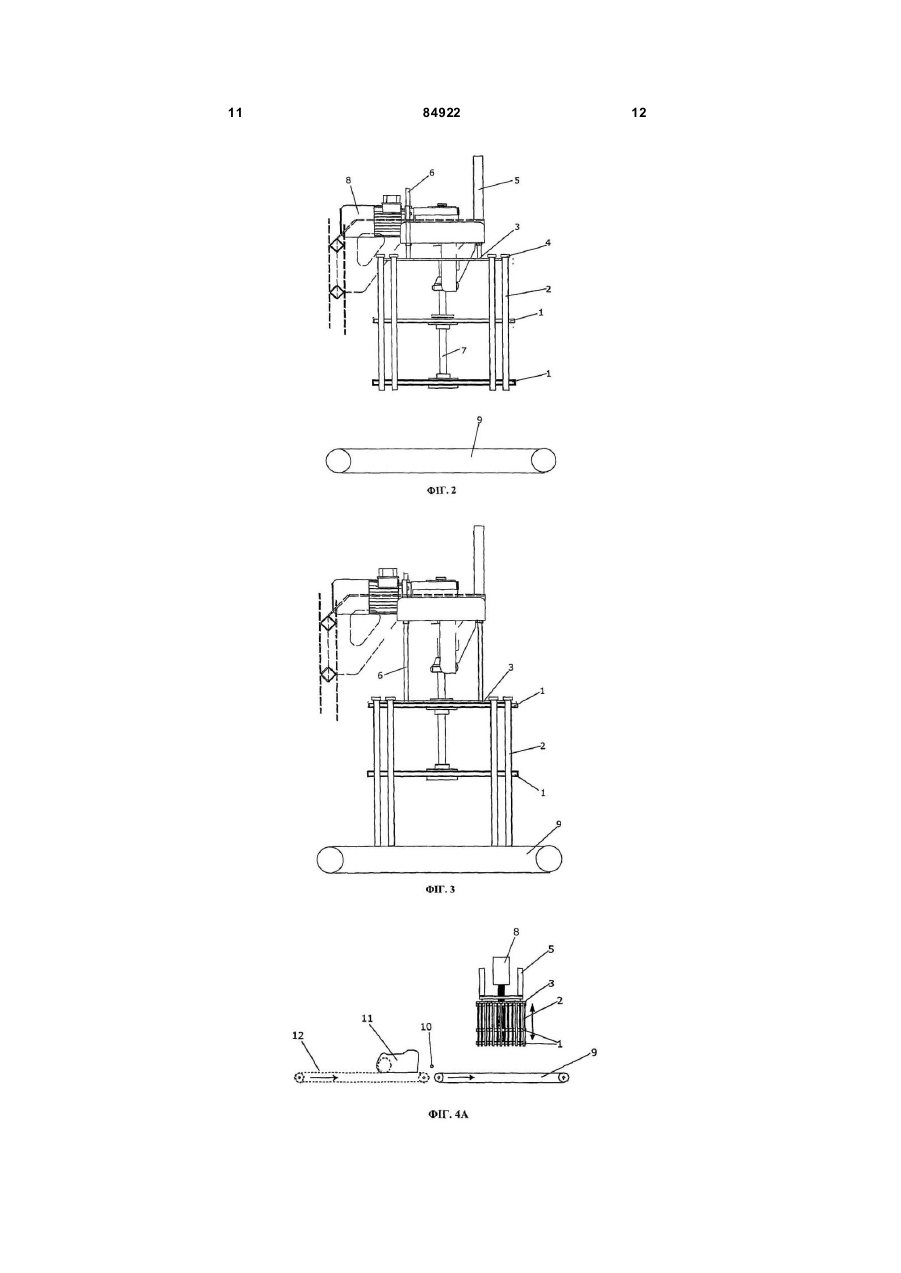
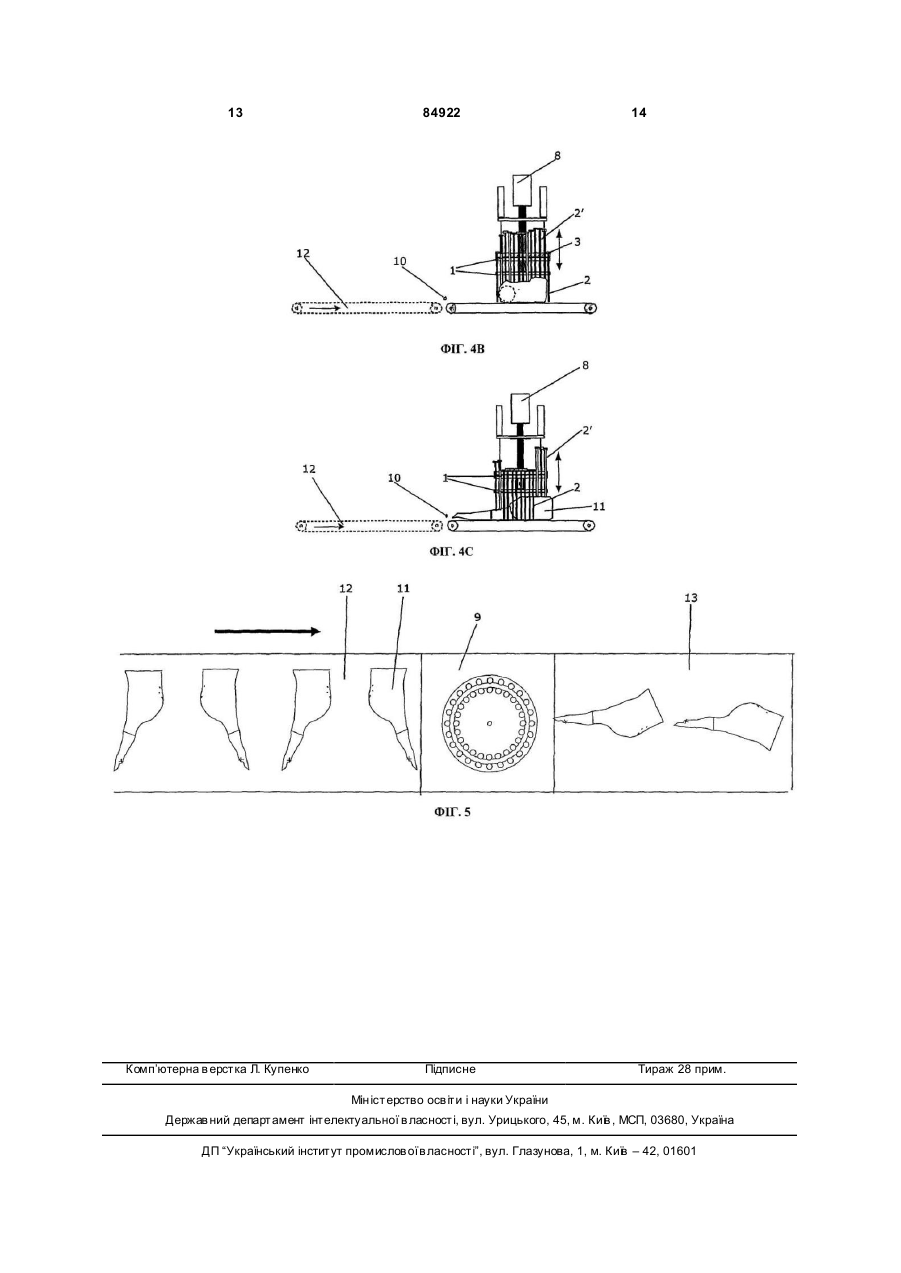
1. Система для обертання продуктів (11), що мають неправильну геометричну форму, яка включає: - обертальну систему, яка має утримувальну частину і засоби (8) для обертання утримувальної частини, а отже, утримуваного продукту (11), на індивідуально визначений кут обертання навколо осі обертання, - засоби для визначення орієнтації кожного продукту (11) при його надходженні до системи, і - контролюючу систему обертальної системи, яка з'єднана оперативно з засобами визначення кута обертання на основі вищезазначеної орієнтації, яка відрізняється тим, що утримувальна частина має множину індивідуально рухомих стрижнів (2), що пристосовані для захоплення продукту (11), фіксуючи у такий спосіб принаймні практично продукт (11) відносно утримувальної частини, які розташовані у такий спосіб, що їх кінцеві частини утворюють конфігурацію, яка включає принаймні частину принаймні одного кола. 2. Система за п. 1, у якій всі стрижні (2) рухомі у принаймні практично взаємно паралельних напрямках. 3. Система за п. 2, у якій вісь обертання є принаймні практично паралельною напрямку руху стрижнів (2). 2 (19) 1 3 84922 4 - порівняння орієнтації продукту з необхідною орієнтацією, виходячи із вищезазначеного порівняння, визначення кута обертання, що потрібен для одержання необхідної орієнтації, - переміщення утримувальної частини, яка має множину стрижнів, до зачеплення з продуктом, з фіксацією у такий спосіб принаймні практично продукту відносно утримувальної частини, при цьому стрижні (2) розташовані у такий спосіб, що їх кінцеві частини утворюють таку конфігурацію, яка включає принаймні частину принаймні одного кола, і - обертання утримувальної частини згідно з кутом обертання, з обертанням у такий спосіб продукту згідно з кутом обертання. 17. Спосіб за п. 16, у якому стадію визначення орієнтації продукту здійснюють за допомогою методів на основі технічного зору. Даний винахід стосується системи для обертання продуктів, щокають неправильну геометричну форму, у якій продукти можуть повертатися на індивідуально визначений кут обертання. Індивідуальний кут обертання може бути визначений на основі орієнтації продукту, коли він надходить до системи. Даний винахід також стосується транспортної системи, що включає описану вище систему та спосіб обертання продуктів, котрі мають неправильну геометричну форму. Виробничі лінії для обробки продуктів часто потребують, щоб продукти надходили у попередньо визначеному положенні та/або орієнтації для надання можливості піддавати продукти подальшій обробці в автоматичний спосіб або обробляти продукти вручн у при ергономічно оптимальному положенні. Існує ряд обертальних блоків, які є придатними для обертання продуктів, що мають однакову та правильну геометричну форму. Вони застосовуються у багатьох місцях, наприклад, перед автоматичними системами для укладання на піддони, де обертання продуктів може сприяти створенню потрібної конфігурації продуктів на результуючому піддоні. У зв'язку з цим піддони застосовуються у максимально можливій мірі, і вони є відносно стійкими, оскільки між окремими шарами на піддоні утворюється стабілізуючий зв'язок. Такі обертальні блоки часто обладнуються підйомним блоком, що рухається знизу, та утримувальним блоком, що рухається зверху. У такий спосіб продукт може обертатись, коли він піднятий над засобами транспортування, шляхом обертального руху підйомного блоку та/або утримувального блоку. Обертання продуктів, що мають неправильну геометричну форму, може знадобиться на виробничих лініях, котрі застосовуються у ряді різних галузей промисловості, наприклад, у харчовій промисловості, зокрема, на бойнях. При підвищеному рівні автоматизації та фокусуванні на ергономіці на бойнях важливо, щоб продукти, такі як шматки м'яса від туші тварини, надходили до наступної обробки на виробничій лінії у правильній орієнтації та положенні для здійснення автоматичного процесу обробки з оптимальним виходом або здійснення ручного процесу в ергономічно вірний спосіб. Наступним процесом може бути, наприклад, автоматичне зняття шкірки, де зрізається сальна частина м'яса, і правильне розташування продукту відносно відповідного устаткування має вирішаль не значення для правильної обробки з високим виходом. У теперішній час продукти вручну поміщають перед устаткуванням для зняття шкірки. Іншим наступним процесом може бути підвішування шматків продукту на стрижнях з гаками (так звані "новорічні ялинки") для подальшого транспортування або проміжного зберігання. У теперішній час шматки продукту повертають у ручний спосіб щоб їх можна було підвісити на стрижні з гаками (новорічні ялинки). Здійснювати це у ручний спосіб трудно, оскільки такі шматки продуктів зазвичай є дуже важкими. Бойні висувають зростаючі вимоги щодо правильної орієнтації та розташування шматків продукту відносно наступного процесу обробки на виробничій лінії, що дозволяє здійснювати наступний автоматичний процес в оптимальний спосіб або здійснювати наступний ручний процес в ергономічно оптимальний спосіб. У той самий час вимагається, щоб устаткування для обробки продуктів було гігієнічним, і щоб очистка устаткування могла здійснюватись легко, тобто з невеликими зусиллями та низькими витратами. Предметом даного винаходу є забезпечення системи для обертання продуктів, що мають неправильну геометричну форму, яка здатна забезпечити правильне позиціонування та орієнтацію продукту, що надходить, перед спрямуванням його на подальшу обробку. Наступним предметом даного винаходу є забезпечення системи для обертання продуктів, що мають неправильну геометричну форму, котра поліпшує ергономіку можливої подальшої ручної обробки продукту в порівнянні з існуючими системами. Ще одним предметом даного винаходу є забезпечення транспортної системи для маніпулювання продуктами, що мають неправильну геометричну форму, де потрібна ручна праця зведена до мінімуму. Згідно з першим аспектом даного винаходу, вищезазначені та інші цілі винаходу реалізуються шляхом забезпечення системи для обертання продуктів, котрі мають неправильну геометричну форму, яка включає: - обертальну систему, котра включає утримувальну частину з множиною індивідуально рухомих стрижнів, що пристосовані для захоплення продукту, фіксуючи у такий спосіб принаймні практично продукт відносно утримувальної частини, і засоби для обертання утримувальної частини, і 5 84922 отже, зафіксованого продукту, на індивідуально визначений кут обертання навколо осі обертання, - засоби для визначення орієнтації кожного продукту при його надходженні до системи, і - контрольну систему для контролювання обертальної системи, вищезазначена контрольна система з'єднана оперативно з засобами визначення, контрольна система пристосована для визначення кута обертання на основі вищезазначеної орієнтації, та для відповідного контролювання обертальної системи. Згідно з другим аспектом даного винаходу, вищезазначені та інші цілі винаходу реалізуються шляхом забезпечення способу для обертання продукту, який включає стадії: - визначення орієнтації продукту, - порівняння орієнтації продукту з потрібною орієнтацією, - виходячи з вищезазначеного порівняння, визначення кута обертання, що потрібен для одержання необхідної орієнтації, і - обертання продукту згідно з кутом обертання. В оптимальному варіанті стадія обертання продукту додатково включає стадії: - переміщення утримувальної частини, котра включає множину стрижнів, до зачеплення з продуктом, з фіксацією у такий спосіб принаймні практично продукту відносно утримувальної частини, і - обертання утримувальної частини згідно з кутом обертання. Оскільки продукти, що надходять, коли застосовується система та/або спосіб згідно з даним винаходом, повертаються в потрібне положення і в потрібну орієнтацію в автоматичний спосіб, необхідні стадії ручної обробки суттєво скорочуються, і таким чином досягається поліпшена ергономіка. Одночасно досягається те, що продукти розташовуються таким чином, що результат наступного автоматичного або ручного процесів обробки оптимізується. Обертальна система включає засоби для захоплення продуктів. Це можуть бути, наприклад, один або кілька стрижнів, наприклад, принаймні практично вертикальні стрижні, котрі можуть розміщуватись у ряд. В оптимальному варіанті втілення ряд засобів захоплення, краще, стрижнів, утворює овальний, коловий або полігональний контур, що дає можливість засобам захоплення діяти на продукт з ряду різних напрямків. Усі стрижні можуть руха тись у принаймні практично взаємно-паралельних напрямках. В оптимальному варіанті втілення продукт, котрий має обертатись, спирається на принаймні практично горизонтальну плоску поверхню. У цьому випадку стрижні можуть з користю руха тись у принаймні практично вертикальному напрямку, тобто вони можуть переміщуватись у напрямку, котрий є принаймні практично нормальним до площини, яка визначається тією поверхнею, на якій лежить продукт. В альтернативному варіанті напрямок руху стрижнів може утворювати будь-який інший придатний кут з поверхнею, на якій лежить продукт. 6 Вісь обертання може також бути принаймні практично паралельною до напрямку руху стрижнів. В оптимальному варіанті втілення стрижні розташовані у такий спосіб, що їх кінцеві частини утворюють деяку конфігурацію, вищезазначена конфігурація включає принаймні частину принаймні одного кола. Ця конфігурація може, наприклад, бути одним або кількома повними колами, та/або однією чи кількома частинами одного або кількох кіл. Частина кола може бути, наприклад, півколом, чвертю кола, або частиною, що покриває довільну потрібну кутову частин у кола. У випадку, коли є два або кілька кіл/частин кіл, вони можуть бути розташовані у такий спосіб відносно одне одного, що утворюється принаймні частина із принаймні двох принаймні практично концентричних кіл. В альтернативному варіанті кола можуть бути розташовані у такий спосіб, що вони не перекриваються, або у такий спосіб, що вони перетинаються або є дотичними одне до одного. Так, в оптимальному варіанті втілення ряд стрижнів розташований принаймні практично вертикально за колом у такий спосіб, що продукт утримується у принаймні практично вертикальному положенні за допомогою принаймні двох напрямних дисків, що мають напрямні отвори для стрижнів. Напрямні диски в оптимальному варіанті змонтовані жорстким чином принаймні практично перпендикулярно до принаймні практично вертикального обертального валу в такий спосіб, що обертання валу спричинює принаймні практично горизонтальне обертання напрямних дисків, і таким чином обертання вертикальних стрижнів навколо центру кола, яке вони визначають. Коли застосовується множина рядів стрижнів, вони розміщуються за принаймні практично концентричними колами. Система може розміщува тися з користю над конвеєром. Розмір(и) колового(их) ряду(ів), де змонтовані стрижні, так само як і кількість колових рядів, і кількість стрижнів у коловому(их) ряді(ах) залежить від продукту(ів), котрий(рі) має обертатись. При використанні множини принаймні практично концентричних колових рядів стрижнів можуть обертатися продукти зі значними варіаціями геометричних розмірів. В альтернативному варіанті стрижні можуть розміщуватись у такий спосіб, що їх кінцеві частини утворюють будь-яку іншу конфігурацію, таку як овал, багатокутник, пряму лінію, зірку, та/або частини однієї або кількох таких конфігурацій. Стрижні можуть розподілятись по даній площі навіть довільним чином. Система може також включати засоби для переміщення стрижнів. Засоби для переміщення стрижнів можуть бути пристосовані для переміщення кожного зі стрижнів у принаймні практично вертикальному напрямку, наприклад, як описано вище. В оптимальному варіанті втілення засоби для переміщення стрижнів включають кінцеву частину, змонтовану на кожному зі стрижнів, та принаймні одну підйомну частину, пристосовану для зачеп 7 84922 лення принаймні деяких кінцевих частин для переміщення принаймні деяких стрижнів. Кінцева частина може бути, наприклад, диском у формі кільця чи циліндра, що має більший зовнішній діаметр, ніж дані стрижні. У цьому випадку підйомна частина може включати підйомне кільце, що має зовнішній діаметр, менший, ніж діаметр кола або частини кола, визначених стрижнями, але більший, ніж діаметр кола, що визначене внутрішньою частиною кілець/дисків, котрі змонтовані на відповідних стрижнях. Таким чином, це підйомне кільце може зачіплювати ряд кілець/дисків, і коли підйомне кільце рухається вгору, стрижні відповідно також будуть рухатися вгор у. У випадку, коли стрижні утворюють принаймні частину дво х концентричних кілець, внутрішній діаметр підйомного кільця має бути більшим, ніж зовнішнє граничне коло внутрішнього ряду вертикальних стрижнів, і меншим, ніж зовнішнє граничне коло кінцевих кілець/дисків, змонтованих на вертикальних стрижнях. Таким чином, одне підйомне кільце може одночасно захоплювати кінцеві кільця/диски, з'єднані з обома колами, і тому можливо підіймати стрижні з обох кіл одночасно. Подібно до цього, додаткові ряди стрижнів можуть бути змонтовані у такий спосіб, що одне підйомне кільце забезпечується для кожних двох рядів стрижнів. Утримувальна частина може додатково включати засоби для контролю орієнтації стрижнів. Засоби для контролю орієнтації стрижнів можуть бути пристосовані для утримання стрижнів у принаймні практично вертикальній орієнтації. Підйомне кільце(ця) може, з користю, бути обладнане принаймні практично вертикальними напрямними та принаймні практично вертикальними підйомними / опускними засобами. Підйомне кільце(ця) розташоване над верхнім напрямним диском та під кільцями/дисками, змонтованими на стрижнях. Коли підйомне кільце(ця) підняте(ті), стрижні відповідно також будуть підняті, оскільки їх несе нижня частина змонтованих кінцевих кілець/дисків. Коли підйомне кільце(ця) опущене, стрижні також відповідно опустяться під дією сили тяжіння. Якщо один або кілька стрижнів торкаються продукту, розташованого на конвеєрі, що розміщений нижче системи, перед тим як підйомне кільце опуститься у своє найнижче положення, опускання цього/цих стрижня(нів) буде зупинено, і він/вони будуть залишатись на даному продукті, тоді як решта стрижнів буде продовжувати опускатись до їх найнижчого положення. Таким чином, продукт буде зафіксований між деякою кількістю стрижнів у такий спосіб, що буде обертатися, коли обертається обертальний вал із жорстко змонтованими напрямними дисками. Обертання припиняється, коли продукт стає в попередньо визначене положення, і підйомне кільце підняте разом з вертикальними стрижнями у своє найвище положення, і продукт на конвеєрі може транспортуватись далі по виробничій лінії. Обертальний вал може, з користю, принаймні практично безперервно обертатися, надаючи в такий спосіб можливість досягати будь-якого бажаного кута обертання. Таким чином, 8 продукт може повертатися точно в потрібне положення. У будь-якому з описаних вище варіантів втілення стрижні можуть в оптимальному варіанті переміщуватись за допомогою принаймні одного приводу. Приводом є в оптимальному варіанті вертикальний привод, пристосований для піднімання / опускання стрижнів у принаймні практично вертикальному напрямку. Система може додатково включати конвеєр для приймання продукту, в оптимальному варіанті конвеєр розташований під системою обертання. У цьому випадку система обертання може бути пристосована для опускання на продукт, що надходить, забезпечуючи тим самим утримання та обертання продукту. Засоби для визначення орієнтації кожного продукту можуть включати оптичні засоби, такі як камера. Таким чином, визначення орієнтації продуктів може здійснюватись за допомогою так званих методів на основі технічного зору. Система даного винаходу може з вигодою складати частину транспортної системи, наприклад, транспортної системи, що утворює частину виробничої лінії у харчовій компанії, такій як бойня. Така транспортна система також включає принаймні один конвеєр, розташований вище відносно системи, і принаймні один конвеєр, розташований нижче відносно системи, щоб дати можливість вводити та виводити продукти в/із системи без потреби застосування стадій ручного маніпулювання. У даному контексті термін "вище" відносно заданої точки на виробничій лінії слід інтерпретувати як таку точку на виробничій лінії, якої продукт досягне під час нормальної роботи конвеєра раніше, ніж заданої точки. Аналогічно, термін "нижче" має інтерпретуватись як така точка, якої даний продукт досягне після досягнення заданої точки. Продукти, що надходять, можуть мати регулярне, послідовно та попередньо визначуване позиціонування, так що кут обертання продуктів може бути встановлений попередньо, і дані можуть бути введені до контрольних засобів системи обертання для забезпечення правильного позиціонування продуктів для наступної обробки. Положення "стоп" для продуктів під системою обертання може бути визначено на основі виявлення переднього краю або тильного краю продукту, і обчислене, виходячи з отриманих емпіричних даних. Продукти можуть надходити у довільному розташуванні, і виявляння при надходженні продукту до системи обертання визначає це положення, і контрольний алгоритм може обчислити кут обертання окремого продукту, чим забезпечується правильне позиціонування продукту на наступній виробничій лінії. Система виявляння може включати відеозапис продукту, що надходить, котрий порівнюється з бажаним положенням. Виходячи з цього, обчислюються кут обертання та положення, де має зупинитися продукт під обертальною системою. Бажано, щоб положення "стоп" було положенням, де центр ваги продукту знаходиться в центрі обертального руху, оскільки результатом цього є ідеальне обертання. 9 84922 Тепер даний винахід буде додатково описаний з посиланням на супровідні фігури, на яких: Фіг.1 являє собою вигляд зверху стрижнів з підйомним кільцем та напрямними дисками, Фіг.2 являє собою вигляд у поперечному перерізі оптимального контуру обертальної системи вздовж лінії A-A на Фіг.1 зі стрижнями та підйомним кільцем у піднятому положенні, Фіг.3 являє собою вид у поперечному перерізі оптимального контуру обертальної системи вздовж лінії A-A на Фіг.1 зі стрижнями та підйомним кільцем в опущеному положенні, Фіг.4А, 4В та 4С схематично та послідовно ілюструють обертання продукту, який має неправильну геометричну форму, і Фіг.5 схематично ілюструє обертання продуктів, які послідовно надходять до обертальної системи. Фіг.1 являє собою вигляд зверху обертальної системи з напрямними дисками 1 та вертикальними стрижнями 2, що розташовані у коловий ряд. На даній Фігурі кінцеві частини вертикальних стрижнів 2 утворюють два концентричних колових ряди. Крім того, показане підйомне кільце 3 для переміщення вертикальних стрижнів 2 у принаймні практично вертикальному напрямку. Фіг.2 являє собою вигляд збоку обертальної системи, що відповідає поперечному перерізу вздовж лінії A-A на Фіг.1. Для ясності на Фіг.2 зображені лише ті стрижні 2, котрі розташовані з правого та лівого боків даного перерізу, відповідно. Проте, слід розуміти, що решта стрижнів 2, як показано на Фіг.1, також присутня в системі, що зображена на Фіг.2. Вертикальні стрижні 2 підняті у верхнє положення шляхом підйому кільця 3, котре несе вертикальні стрижні 2 за допомогою змонтованих кінцевих кілець/дисків 4. Підйомне кільце 3 рухається за допомогою приводу(дів) 5, і вертикальні переміщення контролюються напрямними 6. Напрямні диски 1 жорстко з'єднані з обертальним валом 7, котрий зв'язаний з приводним блоком 8. Під обертальною системою змонтований конвеєр 9 для транспортування шматків продукту. 10 Фіг.3 зображує обертальну систему з підйомним кільцем 3 в нижньому положенні, і вертикальні стрижні 2 опущені до рівня конвеєра 9 під дією сили тяжіння. Фіг.4А, 4В та 4С послідовно ілюструють обертання продукту 11, що має неправильну геометричну форму. Продукт 11 надходить на Фіг.4А на попередній конвеєр 12. Передній та тильний краї продукту 11 виявляються датчиком 10 під час транспортування від конвеєра 12 до конвеєра 9, тобто коли продукт 11 рухається до положення під обертальною системою. Продукт 11 зупиняється під обертальною системою, виходячи з обчислення або попередньо емпірично визначеного положення як показано на Фіг.4В. Підйомне кільце 3 опущене, і вертикальні стрижні 2 опущені через дію сили тяжіння. Під час даної операції деякі стрижні 2' продовжують спиратись на продукт 11 і тому не можуть продовжувати свій рух у нижнє положення. Інші стрижні 2, котрим не заважає продукт 11, опускаються у своє найнижче положення. Таким чином, деякі зі стрижнів 2'спираються на продукт 11, тоді як інші стрижні 2 розташовані поза продуктом 11, і це спричинює утримання продукту 11 цілком опущеними стрижнями 2 під час наступного обертання обертальної системи, і продукт 11 буде в такий спосіб обертатися при обертанні системи. Таким чином, для продукту 11 досягається кут обертання, котрий дорівнює куту, на який повернулась обертальна система. Напрямні диски 1 повертаються на попередньо визначений або обчислений кут обертання за допомогою приводу 8. Таким чином, положення продукту 11 після обертання буде правильним щодо наступної обробки. Фіг.5 являє собою приклад обертання продуктів 11, які послідовно проходять через обертальну систему. У цьому прикладі продукти 11 надходять у такий спосіб, що кожен другий продукт розташований однаковим чином. Продукти 11 виходять із обертальної системи на конвеєр 13 розташованими в такий спосіб, який потрібен для їхньої наступної обробки. 11 84922 12 13 Комп’ютерна в ерстка Л. Купенко 84922 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for rotating products having an irregular geometrical shape, system for transportation of products and method of product rotation
Автори англійськоюBusch Finn Mag
Назва патенту російськоюСистема для вращения продуктов, которые имеют неправильную геометрическую форму, система для транспортирования продуктов и способ вращения продукта
Автори російськоюБуш Финн Мог
МПК / Мітки
МПК: B65G 47/24, B65G 47/82
Мітки: геометричну, система, продукту, продуктів, форму, обертання, транспортування, спосіб, неправильну, мають
Код посилання
<a href="https://ua.patents.su/7-84922-sistema-dlya-obertannya-produktiv-shho-mayut-nepravilnu-geometrichnu-formu-sistema-dlya-transportuvannya-produktiv-ta-sposib-obertannya-produktu.html" target="_blank" rel="follow" title="База патентів України">Система для обертання продуктів, що мають неправильну геометричну форму, система для транспортування продуктів та спосіб обертання продукту</a>
Спосіб перевертання шматків м’яса, що мають неправильну геометричну форму і пристрій для його реалізації
Номер патенту: 84921
Опубліковано: 10.12.2008
Автор: Буш Фінн Мог
МПК: B65G 47/24
Мітки: геометричну, форму, спосіб, неправильну, пристрій, м'яса, мають, шматків, перевертання, реалізації
Формула / Реферат:
1. Пристрій для перевертання шматків м'яса (11), що мають неправильну геометричну форму, який відрізняється тим, що має засоби захоплення для захоплення шматка м'яса (11) та засоби обертання для обертання засобів захоплення навколо осі обертання (8), причому засоби захоплення включають принаймні два конвеєри (1, 2), змонтовані на спільній станині (3), де конвеєри (1, 2) пристосовані для переміщення шматка м'яса (11) у та/або із пристрою,...
Пристрій для охолоджування і обробки нагрітих деталей, що мають форму тіл обертання, з металевих матеріалів, таких як сталь
Номер патенту: 76970
Опубліковано: 16.10.2006
Автори: Гуске Бенно, Грене Зігфрід, Пошманн Інго, Ройке Херманн
МПК: C21D 11/00, C21D 1/62, C21D 9/34
Мітки: металевих, охолоджування, форму, пристрій, нагрітих, деталей, сталь, матеріалів, таких, обробки, обертання, мають, тіл
Формула / Реферат:
1. Пристрій для охолоджування і обробки нагрітих деталей, виконаних у вигляді тіл обертання, з металевих матеріалів, таких як сталь або сталеві сплави, переважно моноблочних коліс, колісних бандажів, колісних дисків або аналогічних дисків і кілець, таких як залізничні і трамвайні колеса, зубчаті колеса і зірочки, причому гарячу деталь у вигляді тіла обертання розташовують в горизонтальному положенні з опорою її периферії на декілька...
Спосіб моделювання полів гама-випромінювання великогабаритних об’ємних джерел, які мають форму паралелепіпеда
Номер патенту: 60557
Опубліковано: 15.10.2003
Автори: Шевченко Сергій Віталійович, Талденко Юрій Дмитрович
МПК: G21C 23/00, G21F 5/00, G21F 7/00
Мітки: моделювання, великогабаритних, джерел, спосіб, полів, мають, паралелепіпеда, гама-випромінювання, форму, об'ємних
Формула / Реферат:
Спосіб моделювання полів гамма - випромінювання великогабаритних об'ємних джерел, які мають форму паралелепіпеда, з застосуванням модельного джерела, який відрізняється тим, що модельне об'ємне джерело виготовляють у вигляді паралелепіпеда з радіоактивного матеріалу, що є аналогічним за елементним складом та радіоактивностю матеріалу джерела, яке моделюється, з розмірами двох граней 1м х 1м і висотою меншої чи рівної товщині джерела, яке...
Спосіб та система для підтримування та/або транспортування дроту
Номер патенту: 81249
Опубліковано: 25.12.2007
Автор: Матзен Клаус Пітер
МПК: B21F 23/00, B21G 3/00
Мітки: транспортування, підтримування, дроту, спосіб, система
Формула / Реферат:
1. Спосіб підтримування та/або транспортування дроту, що передбачає здійснення у машині для деформування дроту принаймні однієї операції на принаймні одному дроті, яка викликає деформацію принаймні частини дроту, а машина містить принаймні два синхронізованих блоки, що обертаються в протилежних напрямках, кожний з яких містить принаймні один робочий пристрій для здійснення вказаної операції, який відрізняється тим, що принаймні два...
Спосіб друку та пристрій для друкування на прошарках, які мають форму зброшурованих об’єктів, таких як паспорти або інші документи, що засвідчують особу
Номер патенту: 29477
Опубліковано: 15.11.2000
Автори: Розен Елі, Ландман Аві, Гассан Жакоб
МПК: G03G 13/14, B42D 15/10, B32B 37/00
Мітки: інші, особу, друку, документи, засвідчують, мають, паспорти, зброшурованих, об'єктів, друкування, таких, спосіб, прошарках, пристрій, форму
Текст:
...прошарок має товщину від 10 до 70 мкм. Температурний режим ламінування становить від 40" до 160°С. Перенос зображення з вказаного тимчасового підшарка на вказаний прозорий прошарок здійснюється при температурі від 40° до 180°С. Ламінування виконується з допомогою шару адгезивного матеріалу, який наноситься на вказаний прозорий прошарок поверх зображення після переносу вказаного зображення на вказаний прошарок. Тимчасовий підшарок має...
Попередній патент: Спосіб перевертання шматків м’яса, що мають неправильну геометричну форму і пристрій для його реалізації
Наступний патент: Кристалічний безводний арипіпразол g, спосіб його одержання, фармацевтична композиція, що містить арипіпразол g, та спосіб її одержання
Випадковий патент: Спосіб уповільнення корозії