Автоматизована система керування напрямком горизонтального буріння свердловини
Номер патенту: 98547
Опубліковано: 25.05.2012
Автори: Зур'ян Олег Володимирович, Гошовський Сергій Володимирович, Зур'ян Олексій Володимирович, Гошовський Володимир Сергійович
Формула / Реферат
1. Автоматизована система керування напрямком горизонтального буріння яка містить сейсмодатчики, що реєструють імпульси від відхиляючого елемента, вимірювальний блок який визначає в залежності від часу приходу імпульсів направлення відхилення свердловини, а також відхиляючий елемент, який в залежності від показників вимірювального блока змінює місце прикладання відхиляючої радіальної сили до бурового інструмента, яка відрізняється тим, що в систему додатково введено зонд, який являє собою автоматичний генератор сигналів, що вмонтований до бурового інструмента таким чином, щоб забезпечити можливість його локації.
2. Система за п. 1, яка відрізняється тим, що в зовнішній блок керування введено блок моніторингу положення зонда, який приймає електромагнітні сигнали від генератора зонда, що надає можливість оперативно вводити поправку в ручному або автоматичному режимі для змінення направлення руху бура під час проходки горизонтальних свердловин, як великого, так і малого діаметра, а також при прокладанні горизонтального тунелю методом "Проколу".
3. Система за будь-яким з пп. 1, 2, яка відрізняється тим, що додатково введено виконавчий поворотний механізм бура, за допомогою якого за наявності відповідних зв'язків між зовнішнім блоком керування та виконавчим механізмом повороту бура з зондом, які розташовані в буровому інструменті, досягається підвищення точності проходки.
Текст
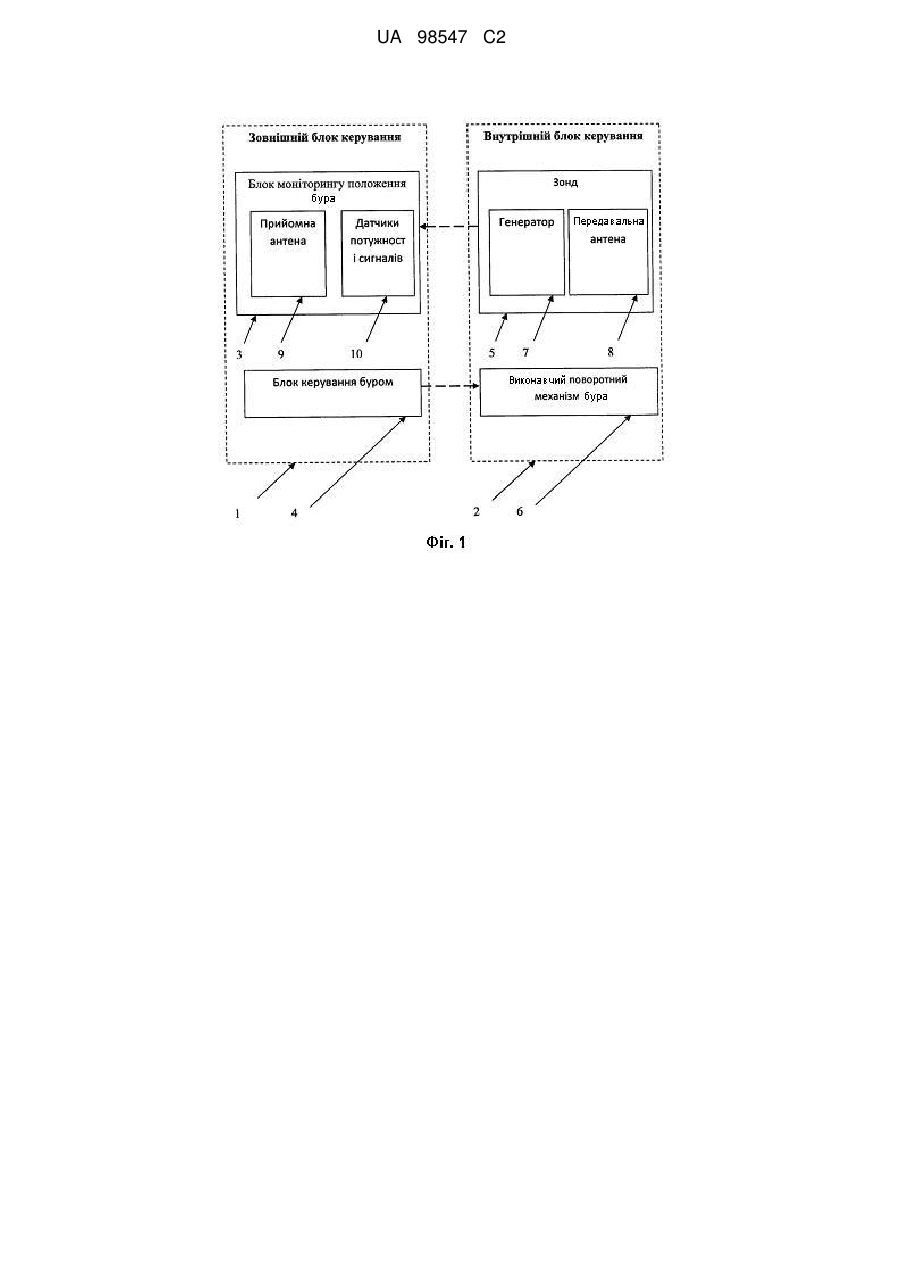
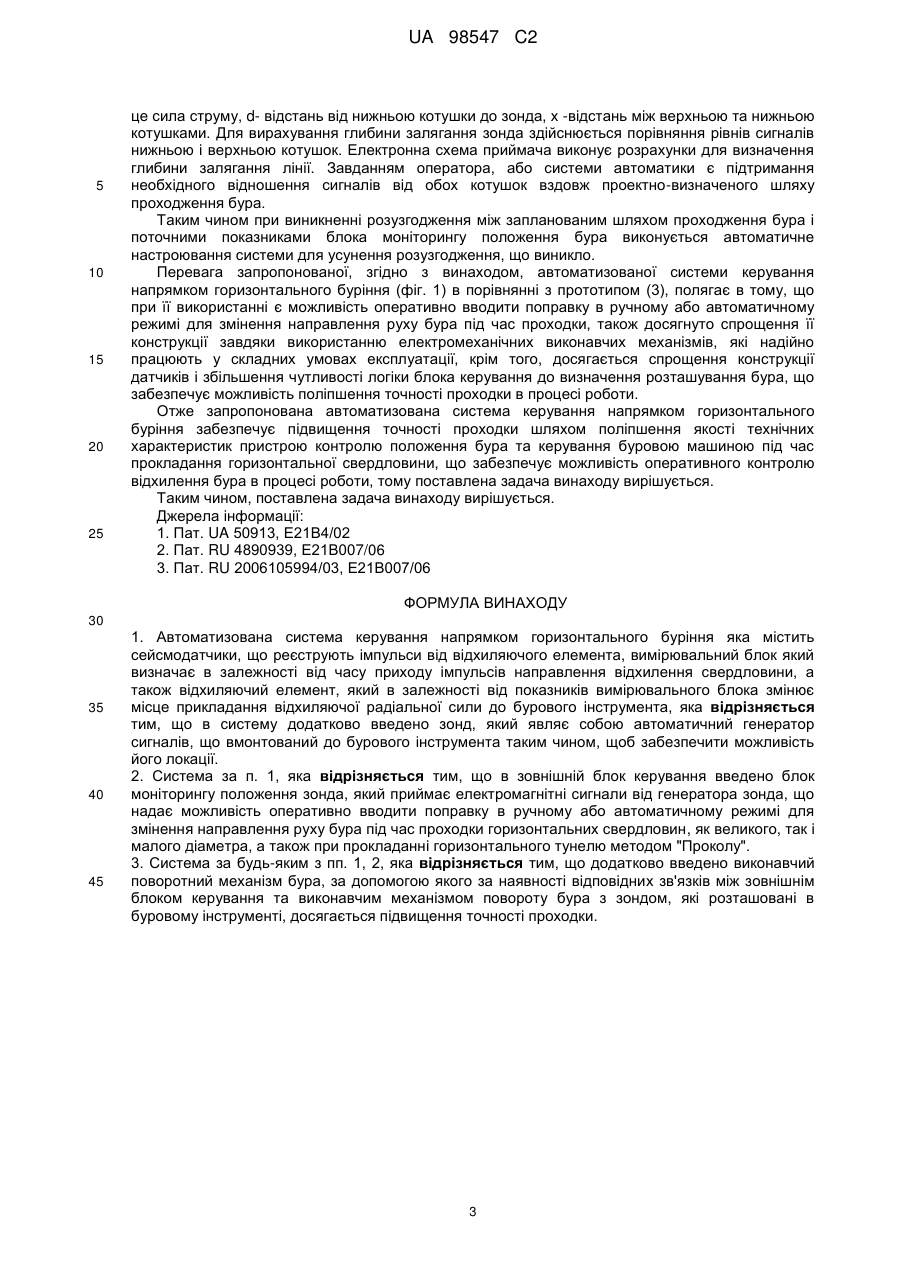
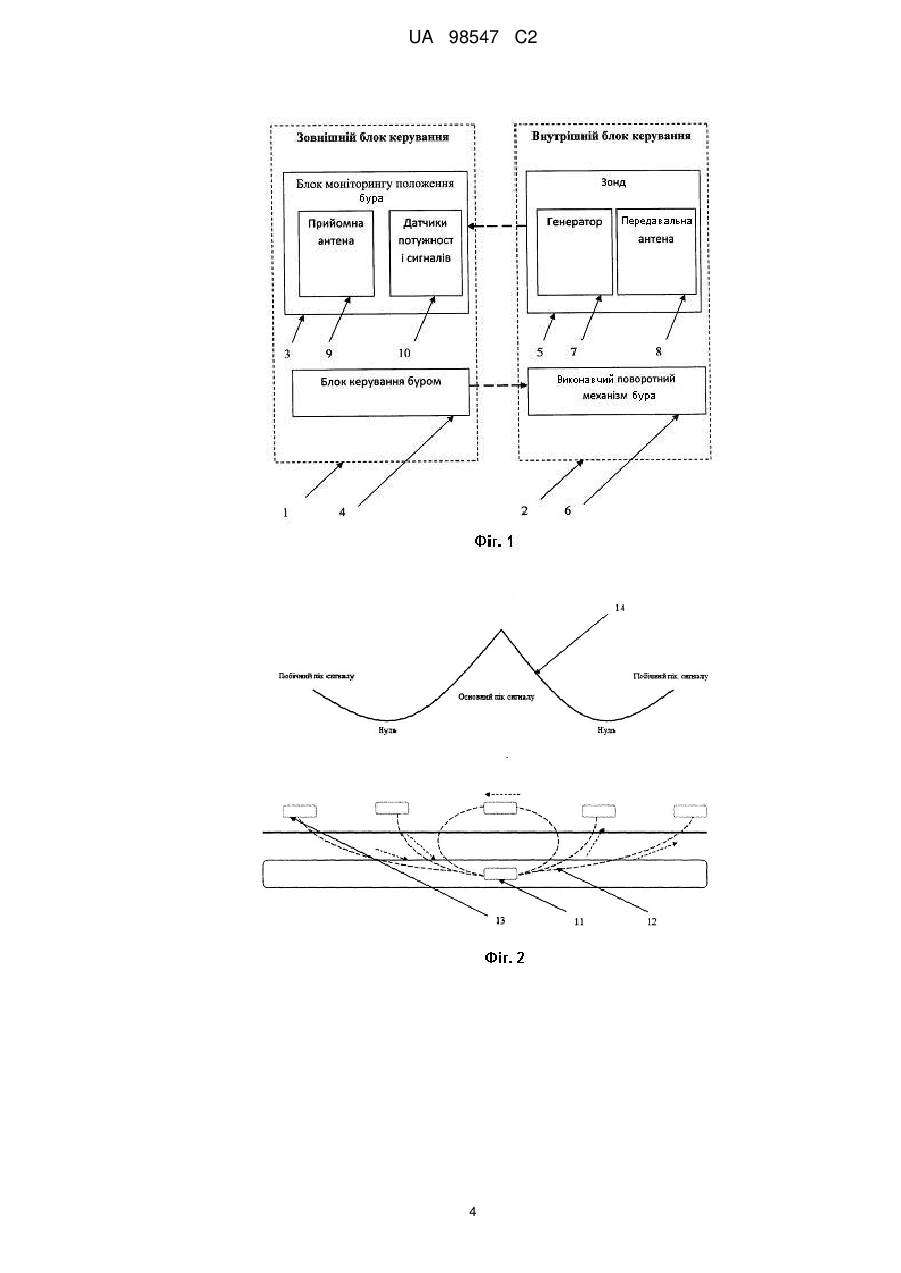
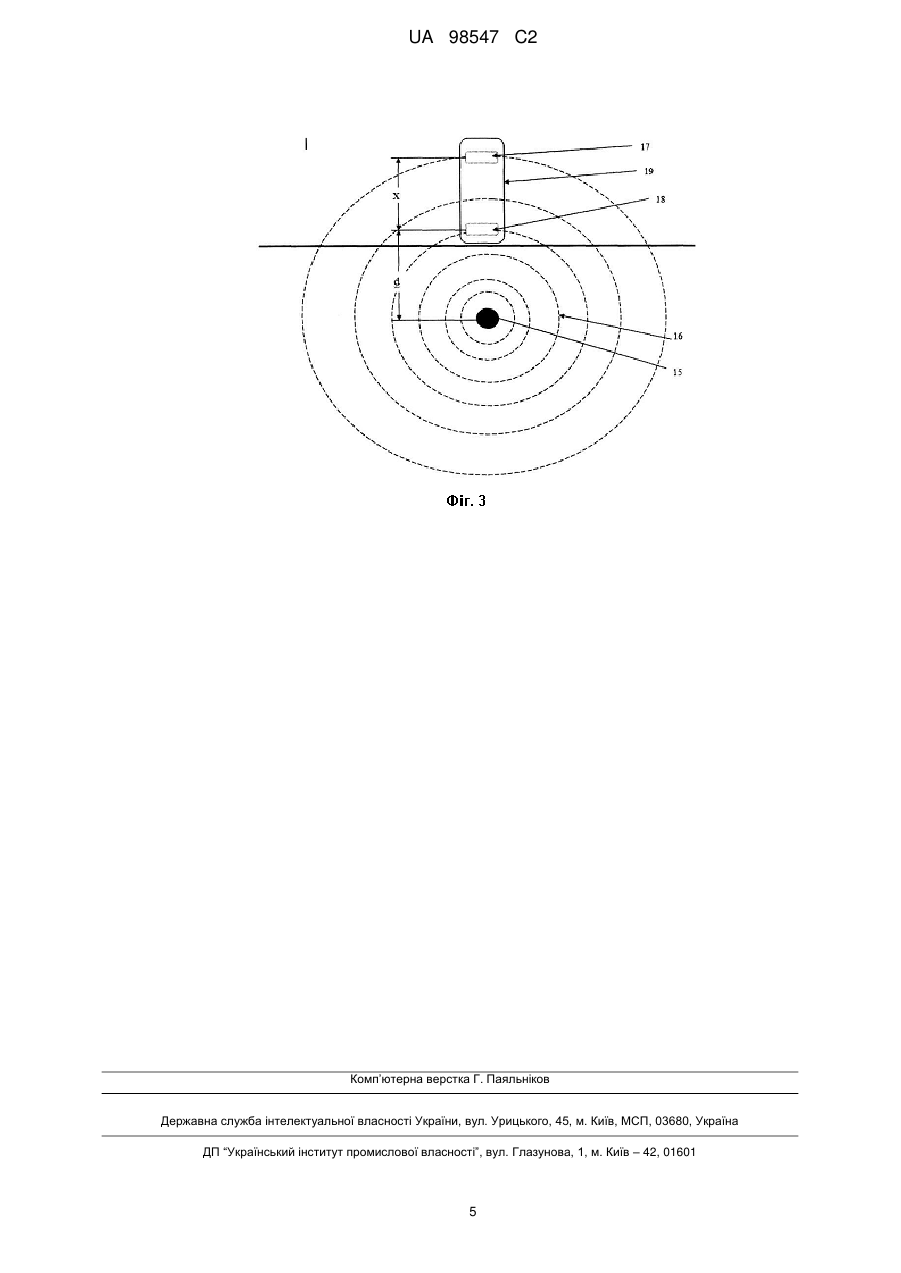
Реферат: Винахід належить до буріння свердловин, а саме до засобів їх спрямованого буріння. Автоматизована система керування напрямком горизонтального буріння містить зовнішній блок керування, блок забезпечення зміни напрямку руху бура, блок моніторингу положення бура, блок керування буром, зонд, виконавчий поворотний механізм бура. Технічний результат винаходу полягає в підвищенні ефективності точності проходки, за рахунок поліпшення якості технічних характеристик пристрою контролю положення бура та керування буровою машиною під час прокладання горизонтальної свердловини, можливості оперативного контролю відхилення бура в процесі роботи, досягнуто спрощення її конструкції завдяки використанню електромеханічних виконавчих механізмів, які надійно працюють у складних умовах експлуатації. UA 98547 C2 (12) UA 98547 C2 UA 98547 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до буріння свердловин, а саме до засобів керування напрямком буріння. Відомий пристрій для керування похило-спрямованим бурінням свердловин [1], який складається з корпусу і п'яти лопатей, які знаходяться в пазах і розташовані рівномірно через 72 градуси по колу. Встановлені у верхній частині лопатей регулюючі гвинти дозволяють змінювати довжину переміщення лопатей вздовж корпусу, що забезпечує можливість зміни величини відхиляючого зусилля на долоті і дає можливість керувати інтенсивністю викривлення свердловини. Недоліком відомого пристрою [1] є те, що при його використанні інтенсивність викривлення свердловини пропорційна величині відхиляючої сили, яка залежить від величини ексцентриситету між осями свердловини і бурового інструмента, а останній в свою чергу залежить від довжини переміщення лопатей і кута нахилу пазів до осі пристрою. Вказаний кут змінюється за допомогою регулюючих гвинтів і задається конструктивно, що вносить похибку вже на початку проведення робіт і збільшує її при проведенні самих робіт. Також відомий спосіб керування бурінням направлених свердловин [2], який включає попереднє визначення фактичного осьового навантаження на долото будь-яким відомим методом. Після виміру осьового навантаження визначають коефіцієнт пропорційності компонування для стабілізації напряму буріння, зниження і набору кривизни і встановлюють технологічний перевідник на відстані від кромки долота до середньої частини технологічного перевідника, що визначається по відомих формулах. Недоліком відомого способу [2] є те, що при його використанні контроль за положенням свердловини здійснюється за допомогою теоретичних розрахунків в результаті чого відсутня можливість оперативного контролю відхилення в процесі роботи і цілеспрямованого змінення траєкторії буріння, що може призвести до значного відхилення від заданої траєкторії. Найбільш близьким технічним рішенням до винаходу за технічною суттю (прототип) є спосіб керування буріння направлених свердловин [3], який полягає в додатку до бурового інструмента перпендикулярно напряму подачі в процесі буріння відхиляючої радіальної сили, здійснюваної з частотою, рівною частоті обертання інструмента, і з фазою, що зсунута відносно нульової фазової точки на кут, що відповідає напряму відхилення, з постійним контролем місця розташування забою свердловини і величини його відхилення від проектного положення, при цьому контроль за напрямком свердловини здійснюється автоматизованою системою за допомогою попередньо встановлених сейсмодатчиків, за якими реєструються імпульси від відхиляючих елементів, порівнюються між собою моменти надходження одного і того ж сигналу і за часом надходження сигналу вираховується направлення відхилення свердловини від проектного положення в залежності від якого змінюють місце прикладання сили від відхиляючого елемента. Недоліком відомого способу [3] є те, що при його використанні контроль за положенням свердловини здійснюється автоматизованою системою керування бурінням за допомогою сейсмодатчиків, що є ефективним тільки при вертикальному бурінні свердловини великого діаметра, при проходженні горизонтальних свердловин малого діаметра ефективність контролю буде значно погіршуватися і контроль буде зовсім неефективним при прокладанні горизонтального тунелю методом "проколу". В основу винаходу поставлено задачу підвищення точності буріння свердловини шляхом поліпшення якості технічних характеристик пристрою контролю положення бура та керування буровою машиною під час проходки горизонтальної свердловини з можливістю оперативного контролю відхилення бура в процесі роботи. Поставлена задача вирішується тим, що згідно з винаходом, в автоматизованій системі керування напрямком горизонтального буріння, яка включає зовнішній блок керування та бурового інструмента з пристроєм для забезпечення змінення напрямку руху бура під час проходки, в систему додатково введено зонд, який являє собою автоматичний генератор сигналів, що кріпиться до бура таким чином, щоб забезпечити можливість його локації. Крім того, для досягнення поставленої задачі винаходу в запропонованій, згідно з винаходом, автоматизованій системі керування напрямком горизонтального буріння, в зовнішній блок керування введено блок моніторингу положення зонда, який приймає електромагнітні сигнали від генератора, що надає можливість оперативно вводити поправку в ручному або автоматичному режимі для змінення напрямку руху бура під час проходки. Завдяки тому, що в автоматизованій системі керування напрямком горизонтального буріння додатково введено зонд, який являє собою автоматичний генератор сигналів, і блок моніторингу положення зонда, який приймає електромагнітні сигнали від генератора що надає можливість оперативного направлення руху бура під час проходки, та завдяки наявності 1 UA 98547 C2 5 10 15 20 25 30 35 40 45 50 55 60 відповідних зв'язків між зовнішнім блоком керування та виконавчим механізмом повороту бура з зондом, які розташовані в буровому інструменті, досягається підвищення точності проходки. В запропонованій, згідно з винаходом, автоматизованій системі керування напрямком горизонтального буріння досягнуто спрощення її конструкції завдяки використанню електромеханічних виконавчих механізмів, які надійно працюють у складних умовах експлуатації, наприклад, при дуже низьких або високих температурах. Також завдяки тому, що в автоматизованій системі керування напрямком горизонтального буріння застосовано зовнішній блок керування, який включає ефективні електромагнітні датчики визначення місця знаходження бура під час буріння свердловини, основним складовим елементом яких є розташовані одна над одною чутливі до електромагнітного випромінювання котушки індуктивності, виходи отриманих сигналів з яких відповідають відхиленню від горизонтального і вертикального положення свердловини відносно поверхні землі, досягається спрощення конструкції датчика і збільшення чутливості логіки блока керування до визначення розташування бура. Суть винаходу пояснюється кресленнями (Фіг. 1-3), на яких зображена автоматизована система керування напрямком горизонтального буріння та принцип її дії. На фіг. 1 схематично зображено принципову схему автоматизованої системи керування напрямком горизонтального буріння. На фіг. 2 схематично зображено принцип за яким визначається горизонтальне відхилення бура під час буріння свердловини. На фіг. 3 схематично показано принцип, за яким визначається вертикальне відхилення бура під час буріння свердловини. Запропонована, згідно з винаходом, автоматизована система керування напрямком горизонтального буріння (Фіг. 1) складається з зовнішнього блока керування 1, та блока забезпечення зміни напрямку руху бура 2. В склад зовнішнього блока керування входять: блок моніторингу положення бура 3, та блок керування буром 4. В склад блока забезпечення зміни напрямку руху бура входять: зонд 5 та виконавчий поворотний механізм бура 6. Основними елементами зонда є генератор 7 та передавальна антена 8, яка конструктивно виконана як котушка індуктивності що кріпиться до бура вздовж каналу свердловини. Основними елементами блока моніторингу положення бура є прийомна антена 9, яка конструктивно складається з двох котушок індуктивності, розташованих горизонтально одна над одною, та двох датчиків потужності сигналів 10. Автоматизована система керування напрямком горизонтального буріння працює наступним чином. Для керування напрямком буріння під час проводки нахиленої свердловини, тобто надання необхідного вертикального та горизонтального положення буру, використовують відхиляючи лопаті, розташовані на буровому інструменті, які приводяться в дію виконавчим поворотним механізмом бура 6. їх керування здійснюється шляхом подавання напруги відповідної полярності від блока керування буром 4. при виникненні розузгодження між запланованими та поточними показниками блока моніторингу положення бура. Для вимірювання розузгодженості між запланованими та поточними показниками блока моніторингу положення бура використовують передавальну 8 та прийомну антену 9, внутрішнього 1 та зовнішнього 2, та зовнішнього 1 блоків керування На фіг. 2 відображено принцип за яким виконується локація та надання необхідного напрямку руху зонду по горизонту. Зонд 11, створює електромагнітне поле. Розподіл силових ліній поля, які створює зонд відображені пунктирною лінією 12. Силові лінії поля мають витягнуту форму, орієнтовану уздовж серцевини антени. В межах визначуваної відстані у міру наближення горизонтальної антени 13 до зонда 11, отриманий сигнал 14 буде підвищуватись. Потім він падатиме до нуля, що свідчить про те, що пік сигналу над зондом пройдений. У міру подальшого переміщення антени сигнал буде знову підвищуватись до більш високого рівня, що вказує на точне положення зонда. У міру руху далі від зонда сигнал спочатку знову впаде до нуля та потім підніметься до меншого значення. Завданням оператора або системи автоматики є підтримання максимального значення сигналу вздовж проектно-визначеного шляху проходження бура. На фіг. 3 відображено принцип за яким виконується локація та надання необхідного вертикального напрямку руху зонда. Зонд 15 створює електромагнітне поле. Розподілу силових ліній поля, які створює зонд відображені пунктирними лініями 16. Верхня та нижня котушки 17, 18, прийомної антени 19, уловлюють електромагнітне поле, яке створює зонд. Рівень сигналів на котушках буде різний. Відгук верхньої антени Ев=І/(d+х). Відгук нижньої антени Ен=І/d. Де І 2 UA 98547 C2 5 10 15 20 25 це сила струму, d- відстань від нижньою котушки до зонда, х -відстань між верхньою та нижньою котушками. Для вирахування глибини залягання зонда здійснюється порівняння рівнів сигналів нижньою і верхньою котушок. Електронна схема приймача виконує розрахунки для визначення глибини залягання лінії. Завданням оператора, або системи автоматики є підтримання необхідного відношення сигналів від обох котушок вздовж проектно-визначеного шляху проходження бура. Таким чином при виникненні розузгодження між запланованим шляхом проходження бура і поточними показниками блока моніторингу положення бура виконується автоматичне настроювання системи для усунення розузгодження, що виникло. Перевага запропонованої, згідно з винаходом, автоматизованої системи керування напрямком горизонтального буріння (фіг. 1) в порівнянні з прототипом (3), полягає в тому, що при її використанні є можливість оперативно вводити поправку в ручному або автоматичному режимі для змінення направлення руху бура під час проходки, також досягнуто спрощення її конструкції завдяки використанню електромеханічних виконавчих механізмів, які надійно працюють у складних умовах експлуатації, крім того, досягається спрощення конструкції датчиків і збільшення чутливості логіки блока керування до визначення розташування бура, що забезпечує можливість поліпшення точності проходки в процесі роботи. Отже запропонована автоматизована система керування напрямком горизонтального буріння забезпечує підвищення точності проходки шляхом поліпшення якості технічних характеристик пристрою контролю положення бура та керування буровою машиною під час прокладання горизонтальної свердловини, що забезпечує можливість оперативного контролю відхилення бура в процесі роботи, тому поставлена задача винаходу вирішується. Таким чином, поставлена задача винаходу вирішується. Джерела інформації: 1. Пат. UA 50913, Е21В4/02 2. Пат. RU 4890939, Е21В007/06 3. Пат. RU 2006105994/03, Е21В007/06 ФОРМУЛА ВИНАХОДУ 30 35 40 45 1. Автоматизована система керування напрямком горизонтального буріння яка містить сейсмодатчики, що реєструють імпульси від відхиляючого елемента, вимірювальний блок який визначає в залежності від часу приходу імпульсів направлення відхилення свердловини, а також відхиляючий елемент, який в залежності від показників вимірювального блока змінює місце прикладання відхиляючої радіальної сили до бурового інструмента, яка відрізняється тим, що в систему додатково введено зонд, який являє собою автоматичний генератор сигналів, що вмонтований до бурового інструмента таким чином, щоб забезпечити можливість його локації. 2. Система за п. 1, яка відрізняється тим, що в зовнішній блок керування введено блок моніторингу положення зонда, який приймає електромагнітні сигнали від генератора зонда, що надає можливість оперативно вводити поправку в ручному або автоматичному режимі для змінення направлення руху бура під час проходки горизонтальних свердловин, як великого, так і малого діаметра, а також при прокладанні горизонтального тунелю методом "Проколу". 3. Система за будь-яким з пп. 1, 2, яка відрізняється тим, що додатково введено виконавчий поворотний механізм бура, за допомогою якого за наявності відповідних зв'язків між зовнішнім блоком керування та виконавчим механізмом повороту бура з зондом, які розташовані в буровому інструменті, досягається підвищення точності проходки. 3 UA 98547 C2 4 UA 98547 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated system for control of direction of horizontal well drilling
Автори англійськоюHoshovskyi Serhii Volodymyrovych, Hoshovskyi Volodymyr Serhiiovych, Zurian Oleg Volodymyrovych, Zurian Oleksii Volodymyrovych
Назва патенту російськоюАвтоматизированная система управления направлением горизонтального бурения скважины
Автори російськоюГошовский Сергей Владимирович, Гошовский Владимир Сергеевич, Зурьян Олег Владимирович, Зурьян Алексей Владимирович
МПК / Мітки
МПК: E21B 4/02, E21B 7/06, E21B 47/02
Мітки: керування, горизонтального, буріння, напрямком, автоматизована, свердловини, система
Код посилання
<a href="https://ua.patents.su/7-98547-avtomatizovana-sistema-keruvannya-napryamkom-gorizontalnogo-burinnya-sverdlovini.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система керування напрямком горизонтального буріння свердловини</a>
Спосіб добудови каналів телефонної каналізації з використанням технології горизонтального спрямованого буріння та технології компенсаційної локації
Номер патенту: 51944
Опубліковано: 10.08.2010
Автор: Нахаба Олександр Васильович
МПК: H04J 3/00, H04M 13/00, E21D 9/00, E21D 11/00
Мітки: спрямованого, спосіб, каналізації, технології, використанням, локації, каналів, компенсаційної, буріння, горизонтального, добудови, телефонної
Формула / Реферат:
Спосіб добудови каналів телефонної каналізації з використанням технології горизонтального спрямованого буріння та технології компенсаційної локації, що є методом горизонтального спрямованого буріння, який відрізняється тим, що нові канали телефонної каналізації добудовують поряд та уздовж старих вже існуючих каналів, при цьому перед виконанням горизонтального спрямованого буріння виконують подвійну (компенсаційну) локацію системою DigiTrak...
Спосіб горизонтального спрямованого буріння для безтраншейного прокладання трубопроводів
Номер патенту: 2630
Опубліковано: 15.06.2004
Автор: Балдетський Веніамін Рюрикович
МПК: E21B 7/04
Мітки: буріння, спрямованого, трубопроводів, горизонтального, прокладання, безтраншейного, спосіб
Формула / Реферат:
Спосіб горизонтального спрямованого буріння для безтраншейного прокладання трубопроводів, що включає вибір напрямку буріння, пілотне буріння, розширення діаметра свердловини та завершальне буріння, який відрізняється тим, що пілотне буріння здійснюють вдавлюванням бурової головки при її одночасному обертанні на горизонтальній ділянці буріння, розширення здійснюють шляхом неодноразового проходження свердловини обертовим рухом розширювача з...
Спосіб керування напрямком буріння і пристрій для його здійснення
Номер патенту: 28529
Опубліковано: 16.10.2000
Автори: Пасинков Роман Юхимович, Молчанов Вячеслав Борисович, Ревякін Володимир Іванович
МПК: E21B 7/08, E21B 47/02
Мітки: здійснення, керування, напрямком, буріння, спосіб, пристрій
Формула / Реферат:
1. Способ управления направлением бурения, включающий установку воздуховодного и с двух сторон от него двух шнековых ставов, на одном конце которых устанавливают головную стяжку с буровыми коронкам, а другой конец шнековых ставов соединяют с выходными муфтами, подачу бурошнекового става в скважину с последующим его наращиванием и разборкой после бурения, отличающийся тем, что перед подачей бурошнекового става в скважину -секции шнеков...
Автоматизована система визначення властивостей порід в процесі буріння

Номер патенту: 20082
Опубліковано: 15.01.2007
Автори: Кунич Віталій Олександрович, Дергачов Володимир Андрійович, Тимошенко В'ячеслав Михайлович, Світличний Олександр Володимирович, Кошовий Микола Дмитрович
МПК: E21B 49/00
Мітки: порід, властивостей, буріння, система, визначення, автоматизована, процесі
Формула / Реферат:
Автоматизована система визначення властивостей порід в процесі буріння, що містить бурову штангу, датчик струму, фільтр нижніх частот, фільтр верхніх частот, аналогово-цифровий перетворювач, елемент порівняння, перший і другий ключі, граничний елемент, лічильник імпульсів, датчик глибини, реєстратор, причому вихід датчика струму з'єднаний з входами фільтра нижніх частот і фільтра верхніх частот, вихід фільтра нижніх частот з'єднаний з входом...
Спосіб обертового буріння прямолінійних ділянок свердловини
Номер патенту: 36564
Опубліковано: 16.04.2001
Автори: Козьмін Дмитро Іванович, Саврей Степан Якович, Шандровський Тарас Романович, Воєвідко Ігор Володимирович, Грималюк Володимир Володимирович, Яремійчук Роман Семенович, Мислюк Михайло Андрійович, Рибчич Ілля Йосипович
МПК: E21B 4/00
Мітки: обертового, свердловини, спосіб, прямолінійних, буріння, ділянок
Текст:
...інструменту, що в цілому, підвищує е фективність буріння. Таким чином, суттєві ознаки безпосередньо впливають на технічний результат, тобто перебувають з ним у причинно-наслідковому зв'язку. Можливість реалізації способу обертового буріння прямолінійних ділянок свердловини підтверджується роботоздатністю відомих засобів з допомогою яких здійснюється вказаний спосіб. Так, відомий пристрій гідравлічного навантаження (патент Росії № 2006563 від...
Попередній патент: Вибуховий прилад конденсаторний
Наступний патент: Припій для паяння титанових сплавів
Випадковий патент: Спосіб захисту цифрової інформації, її носіїв та електронних пристроїв