Механізм сидорів для претворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання
Номер патенту: 47287
Опубліковано: 17.06.2002
Автори: Сидор Андрій Володимирович, Сидор Ольга Богданівна, Сидор Богдан Володимирович
Формула / Реферат
Механізм для перетворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання, який складається з нерухомого корпусу, рухомого корпусу з отвором, кільця, розміщеного в отворі рухомого корпусу з можливістю обертання, двох пальців, закріплених на кільці, двох розміщених концентрично в кільці і рухомому корпусі першого суцільного і другого порожнистого валів, двох важелів, закріплених жорстко на першому суцільному і другому порожнистому валах з можливістю взаємодії з двома пальцями та кільцем, який відрізняється тим, що в нерухомому корпусі і на рухомому корпусі установлені паралельні напрямні перпендикулярно до першого суцільного і другого порожнистого валів, рухомий корпус установлений разом з кільцем з можливістю ексцентрично-поперечного переміщення напрямними в нерухомому корпусі відносно розміщених концентрично першого суцільного і другого порожнистого валів, в рухомому корпусі установлений з можливістю обертання гвинт, взаємодіючий з різзю нерухомого корпусу, два пальці закріплені горизонтально в протилежних торцях кільця в одній площині, що проходить через діаметр кільця, оснащені поздовжніми пазами два важелі закріплені шліцами на першому суцільному і другому порожнистому валах з обох сторін кільця з можливістю взаємодії відповідними пазами з двома відповідними пальцями.
Текст
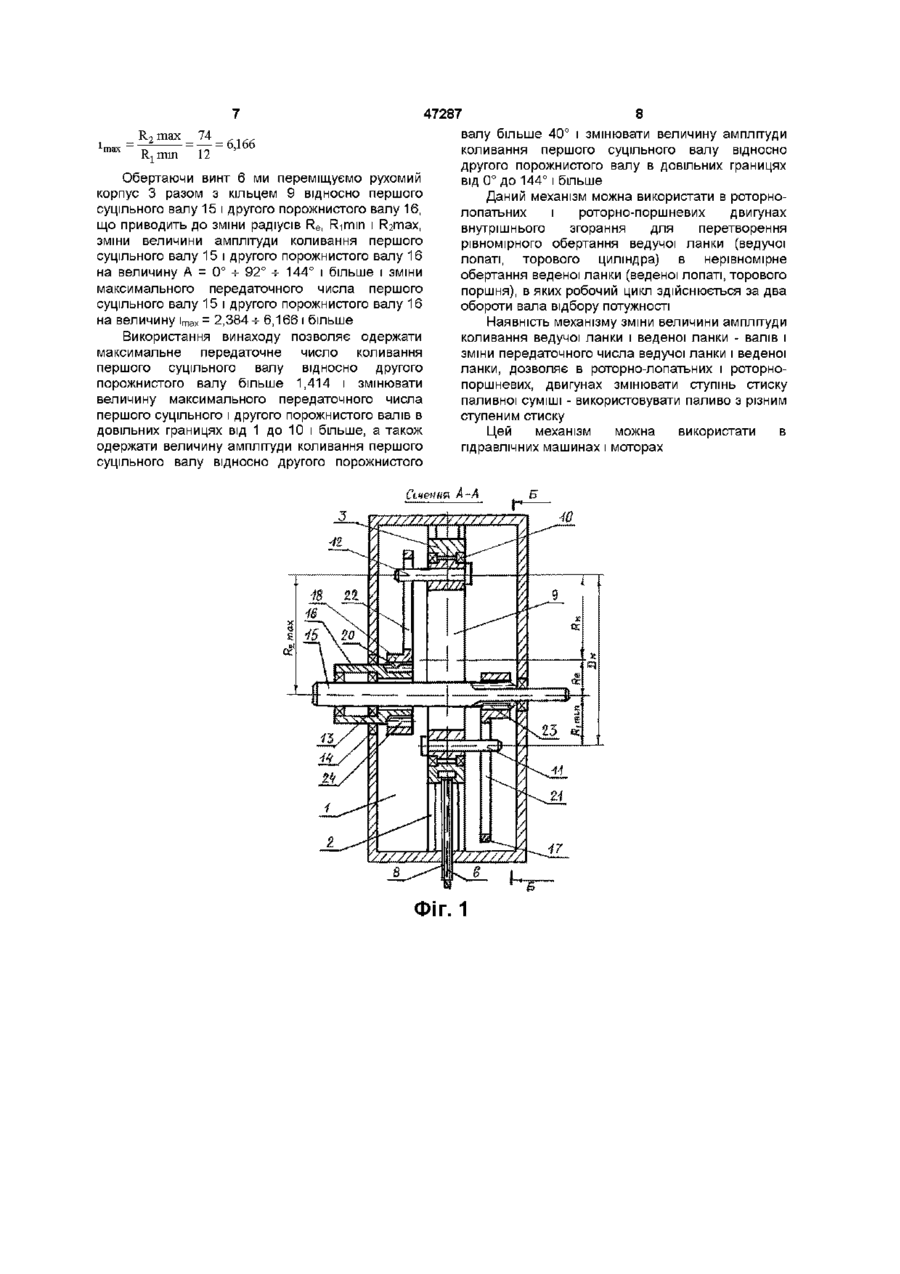
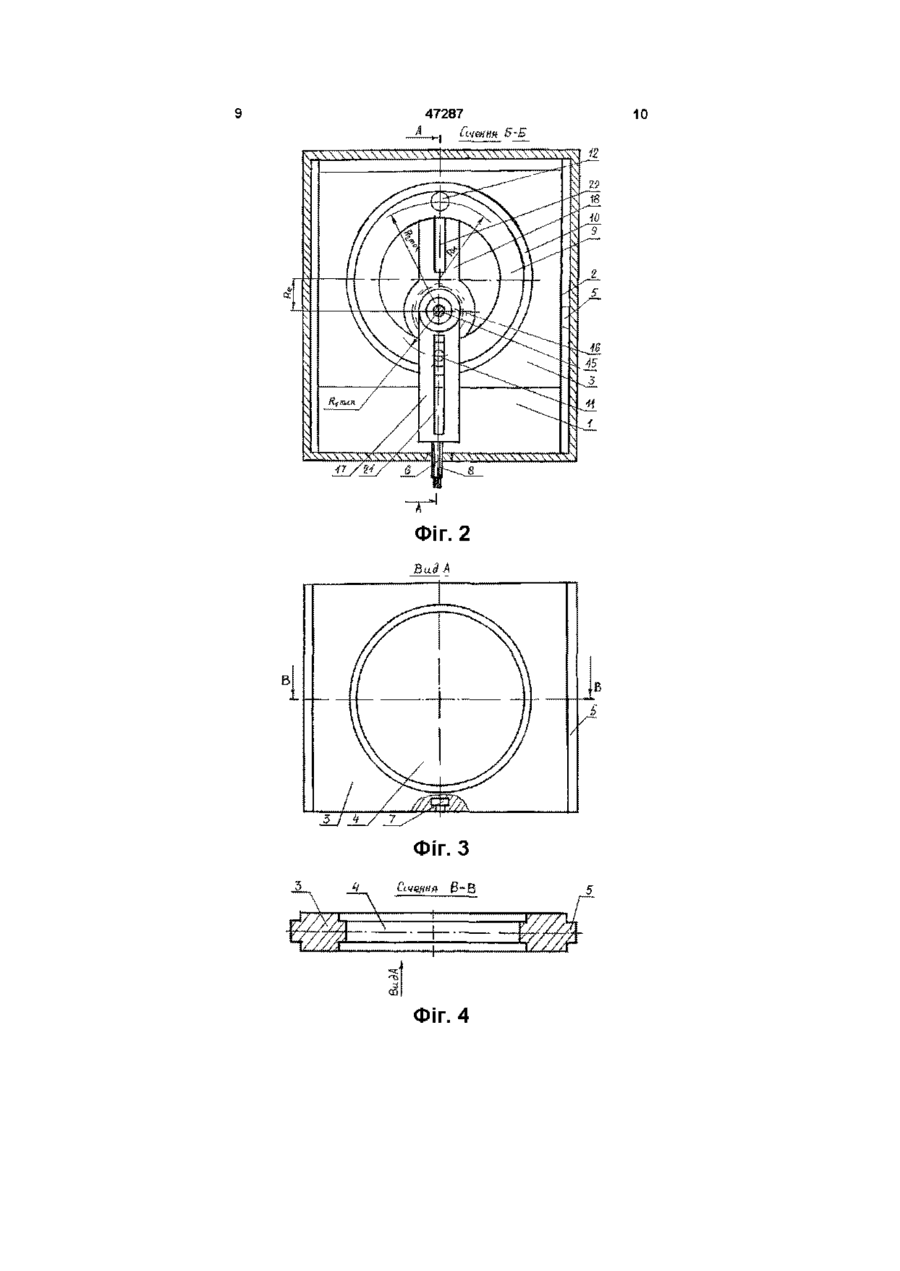
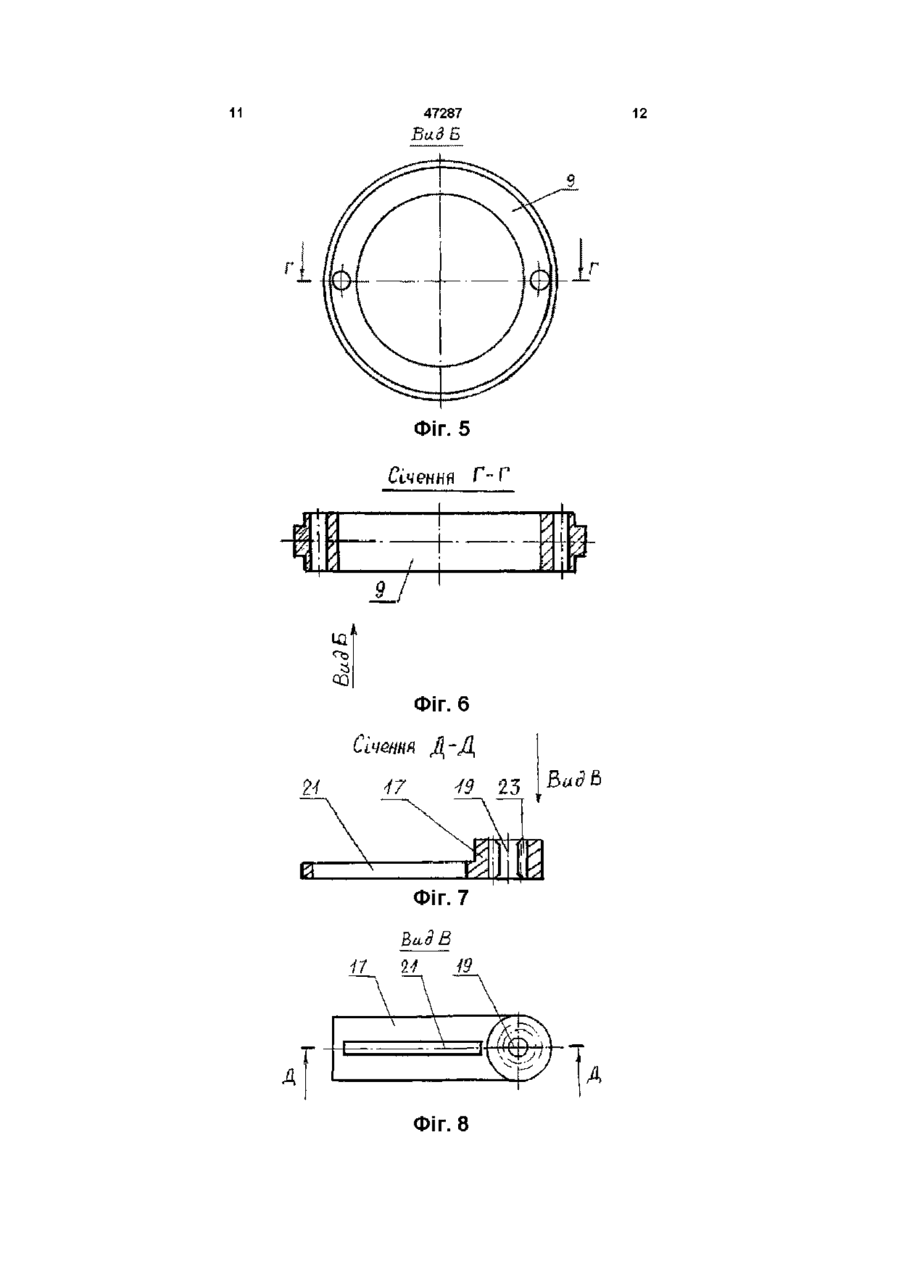
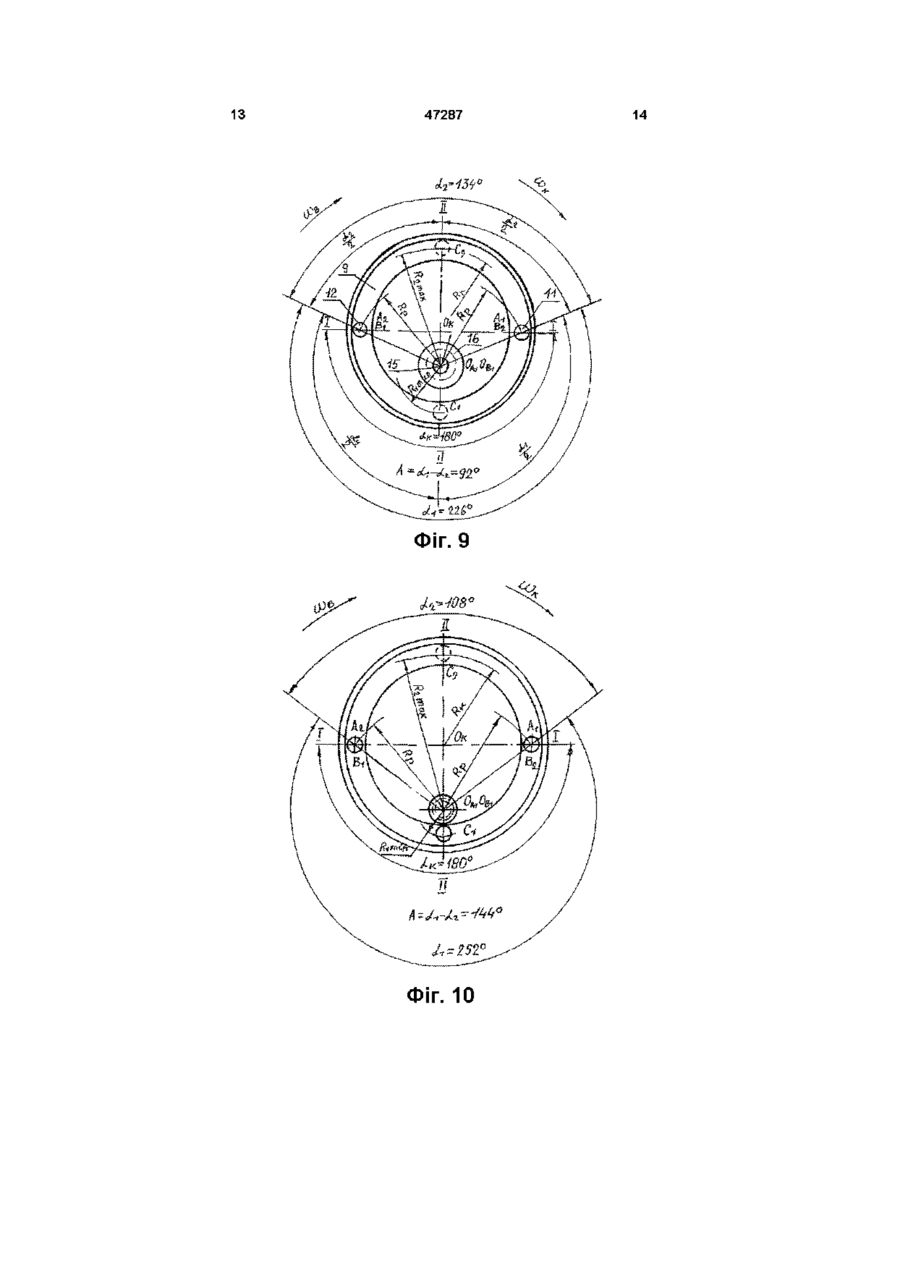
Механізм для перетворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання, який складається з нерухомого корпусу, рухомого корпусу з отвором, кільця, розміщеного в отворі рухомого корпусу з можливістю обертання, двох пальців, закріплених на КІЛЬЦІ, ДВОХ розміщених концентрично в КІЛЬЦІ і рухомому корпусі першого суцільного і другого порожнистого валів, двох важелів, закріплених жорстко на першому суцільному і другому порожнистому валах з можливістю взаємодії з двома пальцями та Винахід відноситься до галузі машинобудування, а саме до механізмів для перетворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання Відомий механізм, що складається з корпуса, концентрично першого двох розміщених суцільного і другого порожнистого валів, двох вилок різних розмірів закріплених ВІДПОВІДНО на першому суцільному і другому порожнистому валах третього суцільного вала розміщеного під кутом нахилу до першого суцільного і другого порожнистого валів, других двох вилок різних розмірів закріплених у взаємноперпендикулярних площинах на третьому суцільному валі, хрестовини з'єднаної шарнірно з вилками менших розмірів і кільця з чотирма шпильками з'єднаного шарнірно з двома вилками більших розмірів (див аналог а с СРСР №544796, Механізм для перетворення рівномірного обертання в нерівномірне обертання, М кл F16H21/48 від 06 07 1974р) В даному механізмі за один оборот першого кільцем, який відрізняється тим, що в нерухомому корпусі і на рухомому корпусі установлені паралельні напрямні перпендикулярно до першого суцільного і другого порожнистого валів, рухомий корпус установлений разом з кільцем з можливістю ексцентричнопоперечного переміщення напрямними в нерухомому корпусі відносно розміщених концентрично першого суцільного і другого порожнистого валів, в рухомому корпусі установлений з можливістю обертання гвинт, взаємодіючий з різзю нерухомого корпусу, два пальці закріплені горизонтально в протилежних торцях кільця в одній площині, що проходить через діаметр кільця, оснащені поздовжніми пазами два важелі закріплені шліцами на першому суцільному і другому порожнистому валах з обох сторін кільця з можливістю взаємодії ВІДПОВІДНИМИ пазами з двома ВІДПОВІДНИМИ пальцями суцільного валу здійснюється чотириразові ЗМІННІ коливання другого порожнистого валу відносно першого суцільного валу на величину 40° при максимальному куті нахилу 45° третього суцільного валу відносно першого суцільного і другого порожнистого валів (див книгу С Н Кожевников, П Д Перфильев, Киев "Техника", 1978г) В даному механізмі передаточне число в одному шарнірі змінюється в границях 1 1 = 1,4114 cosa cos45c до limn = cosa = cos45° = 0,71 при максимальному куті нахилу a = 45° третього суцільного валу відносно першого суцільного і другого порожнистого валів, а в двох шарнірах передаточне число і т а х = 2,8285 до ітщ = 1,42 (див книгу Кожевников Є Н "Теория механизмов и машин", М 1969г с 344 рис 14 6) Отже, першим недоліком даного механізму являється мала амплітуда коливання першого суцільного валу відносно другого порожнистого валу 1 00 47287 Другим недоліком даного механізму являється мале максимальне передаточне число між першим суцільним і другим порожнистим валами Третім недоліком даного механізму є неможливість змінювати максимальне передаточне число в довільних границях від 1 до 10 і більше, із-за відсутності механізму зміни кута нахилу третього суцільного валу, відносно першого суцільного і другого порожнистого валів Відомий механізм перетворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання, що складається з корпуса, оснащених двома шпильками двох розміщених концентрично першого суцільного і другого порожнистого валів, оснащеного двома внутрішніми шпильками закріпленими на внутрішні поверхні кільця, розміщеного з можливістю обертання зовнішньою поверхнею в корпусі виконаному у вигляді кільця, установленого з можливістю зміни його нахилу разом з кільцем відносно першого суцільного і другого порожнистого валів і двох серг, що з'єднують ЗОВНІШНІ шпильки валів з внутрішніми шпильками кільця (див прототип а с СРСР №297830, Механізм для перетворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання, М кл F16H21/48 від 05 03 1968р) Максимальна амплітуда коливання кута нахилу кільця відносно першого суцільного і другого порожнистого валів є 45° При куті нахилу 45° змінний радіус шпильок першого суцільного і другого порожнистого валів змінюється так само, як в карданній передачі і передаточне число 1 1 МІНЯЄТЬСЯ ВІД c o s 4 5 ° = 0,71 cosa cos45 е = 1,414 ДО В даному механізмі за один оборот першого суцільного валу здійснюється чотири рази коливання другого порожнистого валу відносно першого суцільного валу Два рази здійснюється відставання другого порожнистого валу відносно першого суцільного валу і два рази випередження другого порожнистого валу відносно першого суцільного валу Послідовно здійснюється відставання, випередження, відставання і знову випередження першого суцільного валу відносно другого порожнистого валу Тобто через кожні 90° змінюється чотири рази амплітуда коливання першого суцільного валу відносно другого порожнистого валу А це означає, що амплітуда коливання першого суцільного валу відносне другого порожнистого валу менше 90° Основним і першим недоліком даного механізму являється мале максимальне передаточне число Другим недоліком даного механізму являється мала амплітуда коливання валів Для зміни величини амплітуди коливання першого суцільного валу відносно другого порожнистого валу, а також для зміни максимального передаточного числа необхідний ще додатково механізм приводу зміни нахилу кільця від 0° до 45° , що оскладнює конструкцію механізму в цілому Третім недоліком даного механізму є відсутність механізму приводу зміни нахилу кільця від 0° до 45° В основу винаходу поставлена задача створення механізму для перетворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання, який би мав максимальне передаточне число більше 1,414 - міг змінювати максимальне передаточне число в довільних границях, наприклад від 1 до 10 і більше, і міг змінювати в широких границях величину амплітуди коливання від 0° до 90° і більше, а також щоб був простий по конструкції Поставлена задача досягається тим, що у відомому механізмі, що складається з нерухомого корпуса, рухомого корпуса з отвором, кільця розміщеного в отворі рухомого корпуса з можливістю обертання, двох пальців закріплених на КІЛЬЦІ, двох розміщених концентрично в КІЛЬЦІ і рухомому корпусі першого суцільного і другого порожнистого валів, двох важелів закріплених жорстко на першому суцільному і другому порожнистому валах з можливістю взаємодії з двома пальцями - кільцем, згідно з винаходом в нерухомому корпусі і рухомому корпусі установлені напрямні перпендикулярно до першого суцільного і другого порожнистого валів, рухомий корпус установлений разом з кільцем з можливістю ексцентрично-поперечного переміщення напрямними в нерухомому корпусі відносно розміщених концентрично першого суцільного і другого порожнистого валів, в рухомому корпусі установлений з можливістю обертання гвинт, взаємодіючий з різьбою нерухомого корпуса, два пальці закріплені горизонтально в протилежних торцях кільця в одній площині, що проходить через діаметр кільця, оснащені поздовжніми пазами два важелі закріплені на першому суцільному і другому порожнистому валах з обох сторін кільця з можливістю взаємодії пазами ВІДПОВІДНО З двома пальцями Порівняльний аналіз технічного рішення задачі, що заявляється з прототипом показує, що воно відрізняється ознаками приведеними після слова згідно з винаходом, що дає можливість зробити висновок, ще технічне рішення задачі, яке заявляється відповідає критерію "новизна" Порівняльний аналіз технічного рішення задачі, що заявляється не тільки з прототипом, але і з другими технічними рішеннями в даній області техніки не дозволив виявити в них ознак аналогічних, як в рішенні, що заявляється, і які би виконували аналогічні функції, і які відрізняють рішення, що заявляється від прототипу і аналогів В свою чергу наявність ознак, які дають новий технічний результат, що дозволяє одержати максимальне передаточне число більше 1,414 змінювати максимальне передаточне число в довільних границях, наприклад від 1 до 10 і більше, що дозволяє змінювати величину амплітуди коливання між першим суцільним і другим порожнистим валами в границях від 0° до 90° і більше, а також був простий по конструкції На фіг 1 і 2 зображений механізм для 47287 перетворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання, січення А-А і Б-Б, на фіг 3 і 4 зображений рухомий корпус, вид А і січення В-В, на фіг 5 і 6 зображено кільце вид Б і січення Г-Г, на фіг 7 і 8 зображений важіль січення Д-Д і вид В, на фіг 9 і 10 зображена схема амплітуди коливання 92° і 144° і зміни величини максимального передаточного числа і т а х - 2,384 і т а х - 6,166 Механізм для перетворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання, складається з корпуса 1, що має направляючі 2, рухомого корпуса 3, що має отвір 4 і направляючі 5 установленого з можливістю переміщення направляючими 5 по направляючих 2 в корпусі 1, гвинта 6 установленого в отворі 7 рухомого корпуса 3 з можливістю обертання і взаємодії різьбою 8 з корпусом 1, кільця 9 розміщеного в отворі 4 рухомого корпуса 3 на підшипниках 10 з можливістю обертання, двох пальців 11 і 12 закріплених горизонтально з протилежних торців на КІЛЬЦІ 9 в одній площині, що проходить через діаметр кільця 9, двох установлених на підшипниках 13 і 14 в корпусі 1 і розміщених в рухомому корпусі 3 - КІЛЬЦІ 9 концентрично зі зміщенням відносно центра кільця 9 першого суцільного валу 15 і другого порожнистого валу 16, двох важелів 17 і 18 оснащених отворами 19 і 20 і пазами 21 і 22 закріплених шліцами 23 і 24 на першому суцільному валі 15 і другому порожнистому валі 16 з різних сторін кільця 9 з можливістю взаємодії ВІДПОВІДНИМИ пазами 21 і 22 з ВІДПОВІДНИМИ пальцями 11 і 12 Принцип роботи механізму В вихідному положенні центр обертання Ок А і кільця 9 зміщений відносно центрів обертання Ві , валів 15 і 16 на величину Re, наприклад Re = 18мм, перший важіль 17 розміщений на осі Аі Од л п OR n 1 , другий важіль 18 розміщений на осі Ві , тобто пальці 11 і 12 розміщені в положенні 1 Радіуси Rp взаємодії важелів 17 і 18 ВІДПОВІДНО З пальцями 11 і 12 одинакові Rp = 47мм, а передаточне число в цьому положенні рівне 1 При обертанні першого суцільного валу 15 і важеля 17 за годинниковою стрілкою, наприклад на кут ои = 226%, важіль 17 обертаючись з 1 л °А л °А положення Аі ! в положення Аг ' по дузі А1С1А2 змінює величину радіуса взаємодії його паза 21 з пальцем 11 від Rp в положені Аі R-imin в положені Сі А і А і , до положення В2 ' , по дузі В1С2В2 на кут а2 = 134° змінюючи величину радіуса взаємодії його паза 22 вал 16 з положення Ві Ві , в 1 де R2max - максимальний радіус взаємодії важеля 18 з пальцем 12 R2mm - мінімальний радіус взаємодії важеля 17 з пальцем 11 При дальшому обертанні першого суцільного вала 15, важеля 17 по дузі А2С2А1 за ГОДИННИКОВОЮ СТріЛКОЮ Т е п е р ВЖЄ На Кут СІ2 = 1 3 4 ° , другий важіль 18 - другий порожнистий вал 16 повернуться по дузі В2С1В1 на кут он = 226° ВІДПОВІДНО амплітуда коливання першого суцільного валу 15 і другого порожнистого валу 16 визначається по формулі (1) А = он - О-2 - 226° -134° = 92° Максимальна передаточне число першого суцільного валу 15 і другого порожнистого валу 16 визначається по формулі (3) _ R2max Таким чином за один оборот першого суцільного валу 15 здійснюється один раз відставання другого порожнистого валу 16 на величину амплітуди А = 92° і один раз випередження другого порожнистого валу 16 відносно першого суцільного валу 15 на величину А = 92° Передаточне число при амплітуді коливання А - в положені 1 1 , і від R-imin в положенні Сі до Rp в положені Аг А і , при цьому палець 11 разом з кільцем 9 повернуться по дузі А-іСіАг на кут ак = 180° Кільце 9 обертаючись на 180° поверне другий палець 12 по дузі В1С2В2 теж на кут ак = 180° - положення 1 В свою чергу палець 12 взаємодіючи з пазом 22 важеля 18 оберне другий важіль 18 - другий ° R де Ri - змінний радіус взаємодії важеля 17 з пальцем 11 R2 - змінний радіус взаємодії важеля 18 з пальцем 12 Максимальне передаточне число першого суцільного валу 15 і другого порожнистого валу 16 визначається по формулі R 7 max W = ^ W (3) RT А і порожнистий г, л п з пальцем 12 від Rp в положенні Ві до R2max Ві в положені Сг -положені 1 1 , і від R2max в O положені O2 , до Rp положенні В2 ° положенні 1 Амплітуда коливання першого суцільного валу 15 і другого порожнистого валу 16 визначається по формулі А= си -
ДивитисяДодаткова інформація
Автори англійськоюSydor Andrii Volodymyrovych, Sydor Bohdan Volodymyrovych
Автори російськоюСидор Андрей Владимирович, Сидор Богдан Владимирович
МПК / Мітки
МПК: F16H 21/48
Мітки: механізм, нерівномірне, рівномірного, претворення, обертання, швидкості, регульованою, амплітудою, сидорів
Код посилання
<a href="https://ua.patents.su/8-47287-mekhanizm-sidoriv-dlya-pretvorennya-rivnomirnogo-obertannya-v-nerivnomirne-z-regulovanoyu-amplitudoyu-shvidkosti-obertannya.html" target="_blank" rel="follow" title="База патентів України">Механізм сидорів для претворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання</a>
Механізм для перетворення рівномірного обертання в нерівномірне
Номер патенту: 32046
Опубліковано: 15.12.2000
Автори: Таранець Олександр Ігнатієвич, Скрипніков Олег Іванович, Касьянов Валерій Васильович
МПК: F16H 21/44
Мітки: перетворення, обертання, механізм, рівномірного, нерівномірне
Текст:
Спосіб збільшення швидкості обертання та стабілізації обертання ротора двигуна та пристрій для його здійснення
Номер патенту: 24268
Опубліковано: 07.07.1998
Автори: Надєін Владислав Семенович, Ткач Анатолій Анатолійович
Мітки: стабілізації, обертання, здійснення, ротора, спосіб, швидкості, двигуна, збільшення, пристрій
Формула / Реферат:
1. Способ увеличения скорости вращения и стабилизации вращения ротора двигателя, при котором текущую среду направляют на прижатые к упорам в просвете рамочного маха вращающиеся части составной лопасти, внешнюю и внутреннюю, циклическим воздействием этих частей на упоры рамочного маха с одновременным переводом вращающихся частей других составных лопастей во флюгерное положение, вращают ротор, отличающийся тем, что увеличение мощности и КПД...
Пристрій для вимірювання швидкості обертання об’єкта
Номер патенту: 26841
Опубліковано: 29.12.1999
Автори: Большакова Інесса Антонівна, Ворошило Галина Іванівна, Роговська Аліна Тадеушівна
МПК: G01P 3/42
Мітки: обертання, пристрій, швидкості, вимірювання, об'єкта
Формула / Реферат:
Устройство для измерения скорости вращения объекта, содержащее по крайней мере один постоянный магнит, укрепленный на вращающемся объекте, отличающееся тем, что оно содержит датчик Холла в качестве приемника сигнала, генератор переменного однополярного сигнала, операционный усилитель и нуль-индикатор, причем генератор переменного однополярного сигнала соединен со входом датчика Холла, выход датчика Холла через операционный усилитель соединен...
Пристрій для стабілізації швидкості обертання ведучого вала стрічкопротяжного механізму магнітофона

Номер патенту: 11689
Опубліковано: 25.12.1996
Автор: Юрасов Віктор Семенович
МПК: G11B 15/43
Мітки: стабілізації, магнітофона, швидкості, механізму, стрічкопротяжного, обертання, вала, пристрій, ведучого
Формула / Реферат:
Устройство для стабилизации частоты вращения ведущего вала лентопротяжного механизма магнитофона, содержащее источник питания и последовательно соединенные частотный дискриминатор, усилитель-преобразователь, усилитель мощности и электродвигатель, ротор которого кинематически связан с ведущим валом и измерителем частоты вращения, отличающееся тем, что, с целью повышения точности стабилизации частоты вращения ведущего вала, в него введены...
Пристрій для сигналізації швидкості обертання валу
Номер патенту: 2102
Опубліковано: 26.12.1994
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
Мітки: обертання, пристрій, швидкості, валу, сигналізації
Формула / Реферат:
Устройство для сигнализации о скорости вращения вала, содержащее блок управления, формирователь запрещающего сигнала, элемент запрета, блок памяти, управляющий формирователь, элемент И, элемент ИЛИ, два счетчика импульсов, генератор, блок отсутствия оборотов, блок переключения и формирователь импульсов, выход которого соединен с блоком отсутствия оборотов, генератор соединен через первый и второй счетчики импульсов с формирователем...
Попередній патент: Установка для уловлювання парів спирту і спиртопродуктів з газів бродіння
Наступний патент: Система водопостачання галана о.к.
Випадковий патент: Відвал бульдозера