Тепловий двигун
Номер патенту: 67270
Опубліковано: 15.06.2004
Автори: Дощенко Галина Генадіївна, Пилипенко Микола Вадимович, Ходаков Віктор Єгорович, Абрамов Генадій Серафимович



Формула / Реферат
1. Тепловий двигун, що містить нагрівач у вигляді джерела інфрачервоного випромінювання, встановлений у корпусі за допомогою тримача пружний тепловий робочий елемент у вигляді циліндра з першою та другою еластичними смужками, притиснутими одна до одної, виконаними кільцевими з матеріалу, що має контрастний по відношенню одна до одної коефіцієнт температурного розширення, виконаними суцільними або з доменною, або дискретною структурою, звернений до випромінювання термочутливий прошарок, вихідна керуюча ланка встановлена з можливістю взаємодії з бічною поверхнею циліндра, краї смужок жорстко закріплені в основі циліндра, який відрізняється тим, що додатково містить охолодник, зазначений циліндр виконаний у вигляді порожнистої трубки або з термоізоляційним заповненням і додатково містить перший термоізолюючий прошарок із боку зазначеної другої кільцевої еластичної смужки, зазначене джерело інфрачервоного випромінювання виконане імпульсним, зазначені термочутливий прошарок і охолодник зв'язані з торцевими частинами зазначених еластичних кільцевих смужок з протилежних їх сторін, відповідно, зазначена вихідна керуюча ланка виконана у вигляді, принаймні, одного підпружиненого штовхача, закріпленого в зазначеному корпусі із можливістю взаємодії з бічною поверхнею циліндра з боку зазначеної першої кільцевої еластичної смужки, підпружинений штовхач додатково обладнаний другим термоізолюючим прошарком з боку зазначеної першої кільцевої еластичної смужки, протилежні кінці штовхачів є виходом пристрою.
2. Пристрій за п. 1, який відрізняється тим, що додатково містить пружину стиснення, один кінець якої механічно зв'язаний із виступами, розташованими в середній частині зазначеного штовхача, а другий - з обмежувачами отворів зазначеного корпусу.
3. Пристрій за п. 2, який відрізняється тим, що додатково містить шайбу, установлену між зазначеною пружиною стиснення й обмежувачами отворів зазначеного корпусу.
Текст
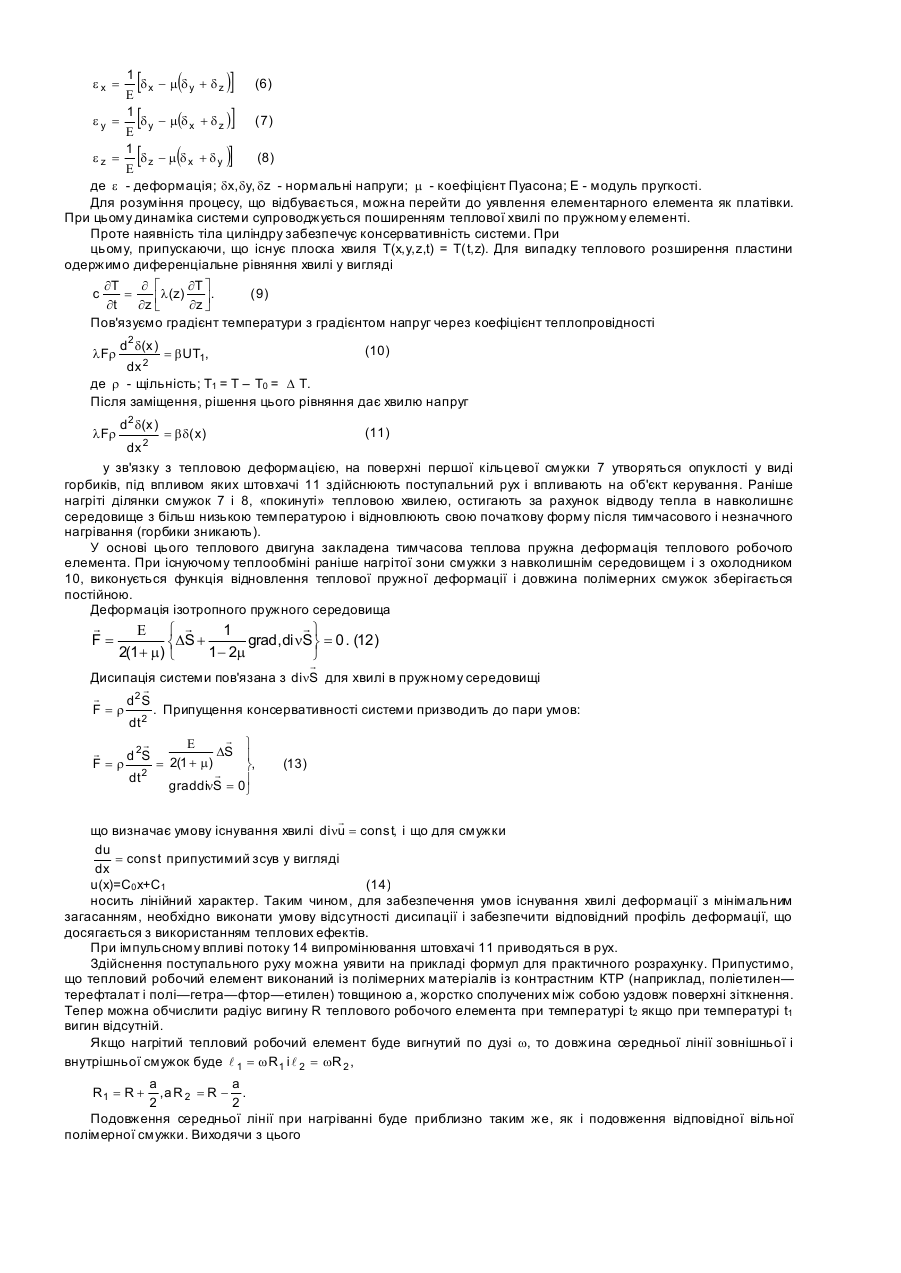
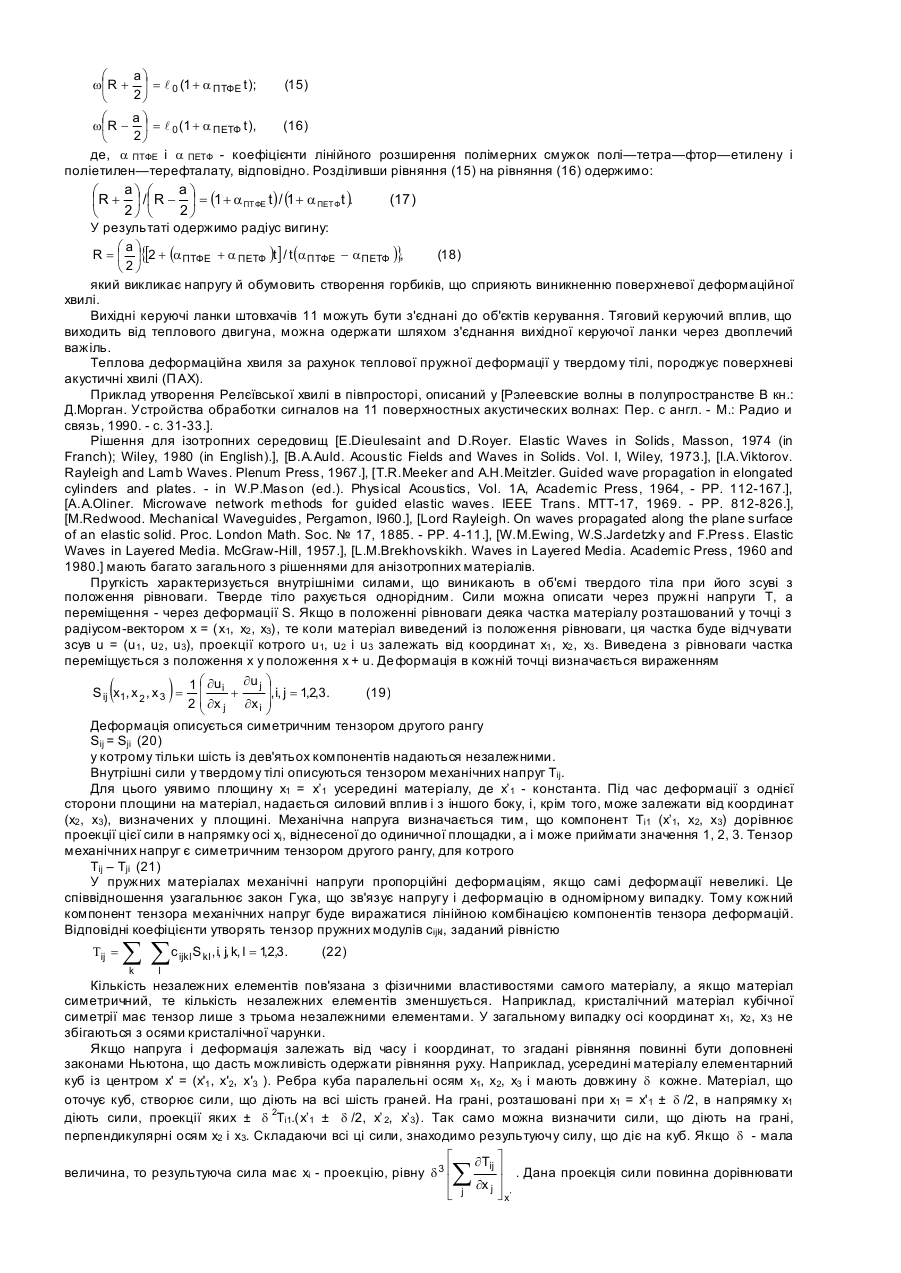
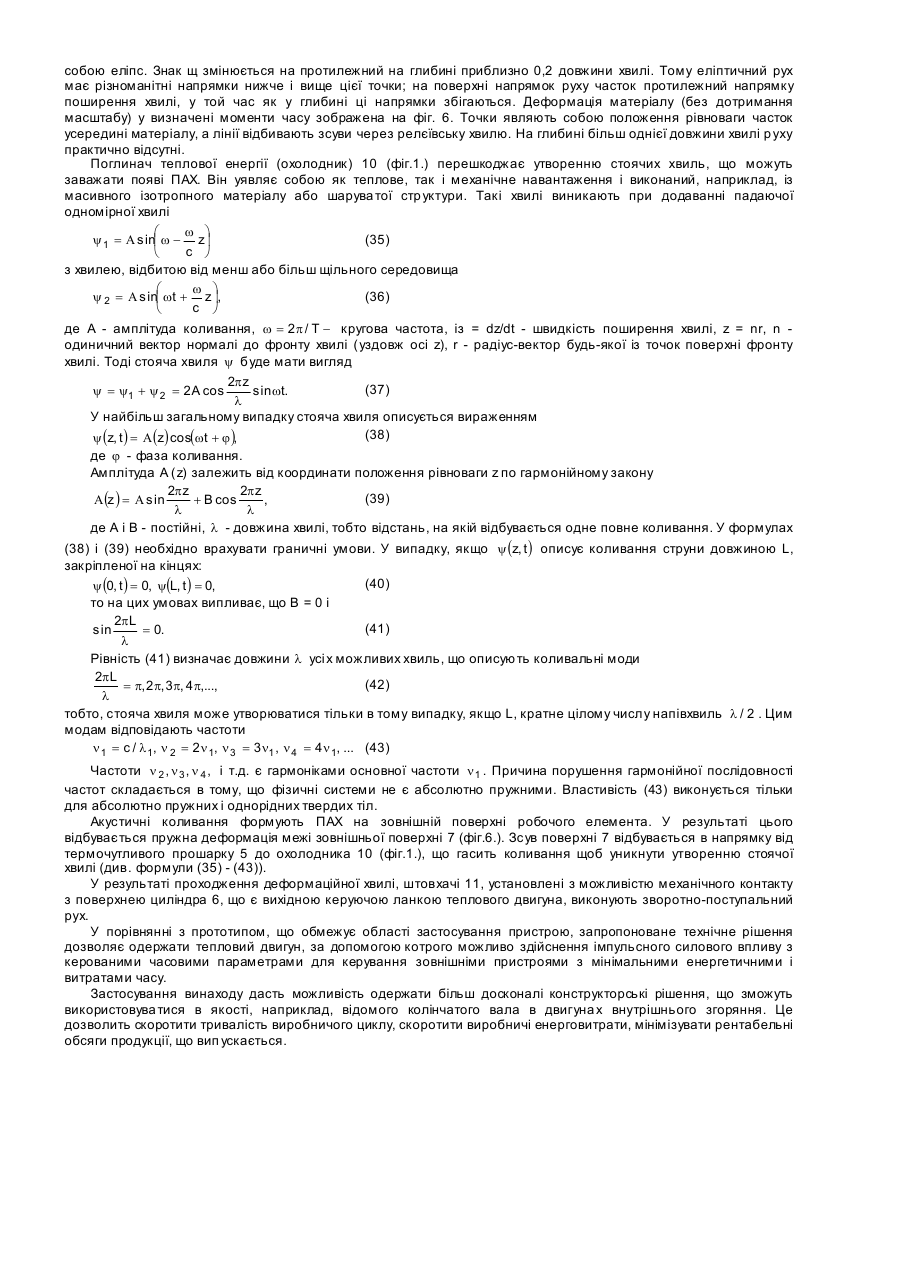
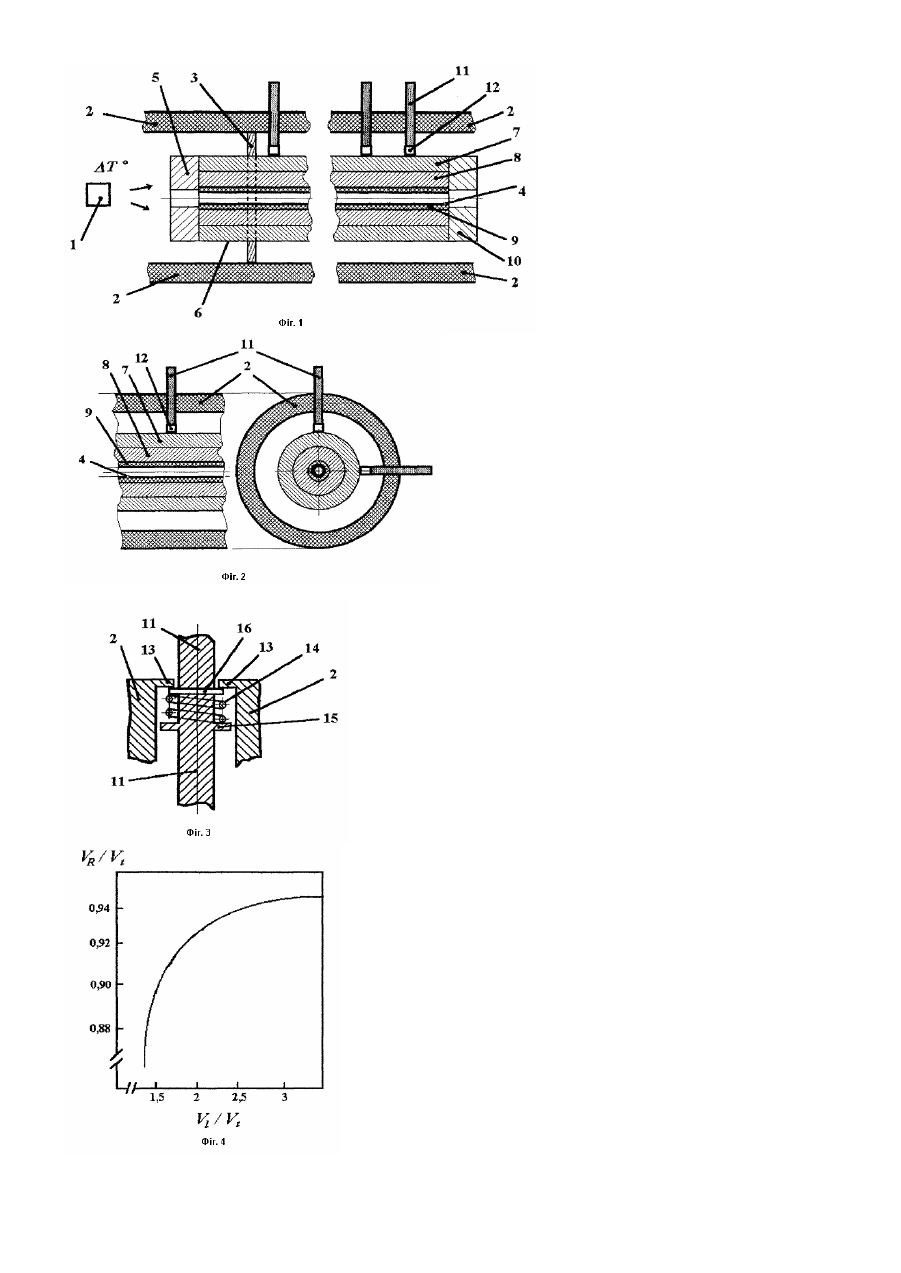
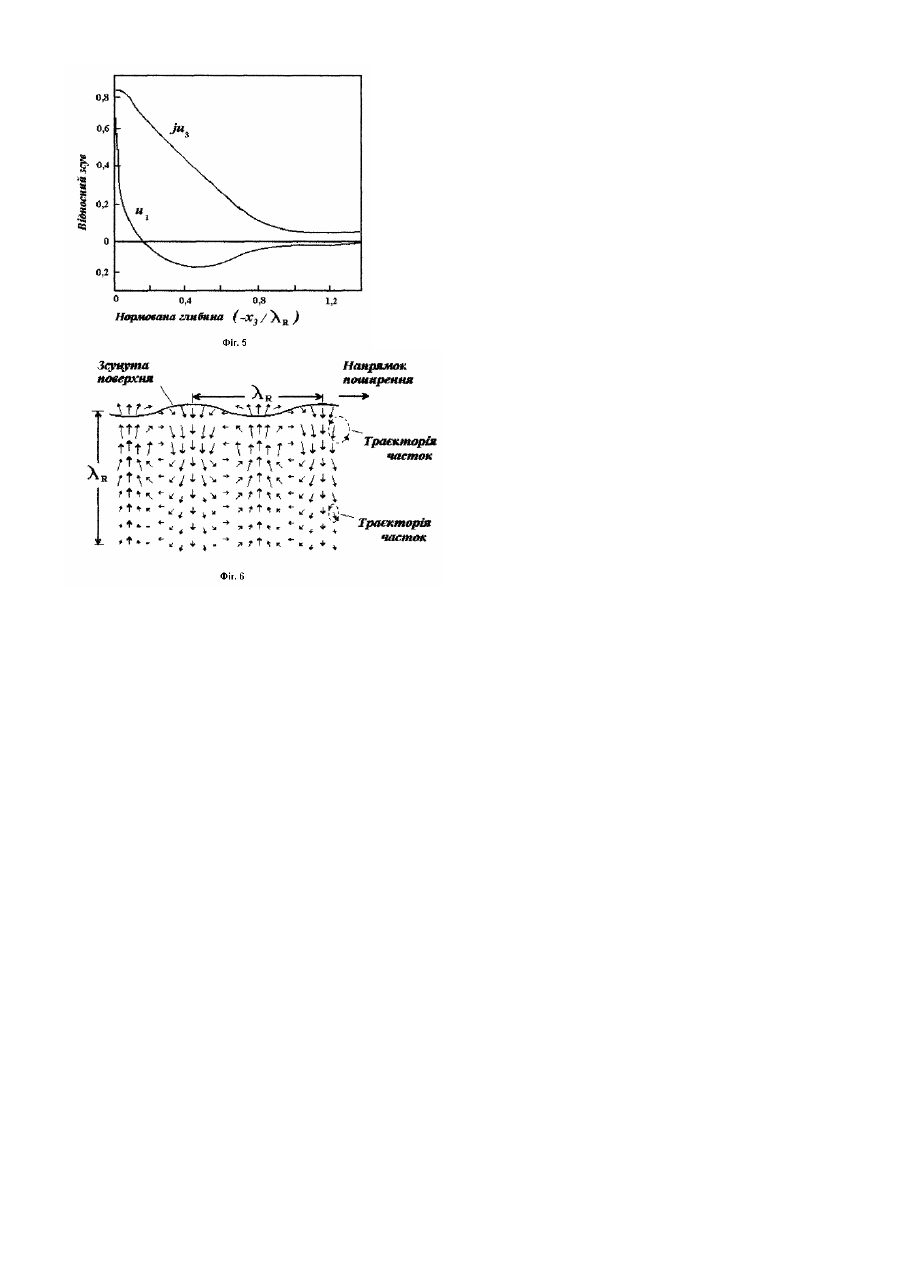
Винахід відноситься до пристроїв для одержання механічної енергії переміщення за рахунок теплових деформацій твердих теплових робочих елементів і може бути використаний при створенні виконавчих механізмів двигунів, для автоматизації виробничих процесів, у медичному устатк уванні, у наукових дослідженнях. Відомий привід [А. с. СРСР № 931946, МКВ - F 03 G 7/06, 1980.], що містить нагрівач у ви гляді джерела інфрачервоного випромінювання і притиснуті одна до одної теплові робочі елементи у вигляді кільцевих смужок, розміщених на бічних поверхнях кареток-циліндрів. Недоліком цього приводу, є, недостатня чутливість і точність одержуваного переміщення, обумовлені високою теплопровідністю робочих елементів, виконаних із металевого сплаву, що має властивість термомеханічної пам'яті. З рівня техніки відомим є привід [А. с. СРСР № 1443526, МКВ-4 — F 03 G 7/06. Опубл. 14.01.87.], що містить нагрівач у вигляді джерела інфрачервоного випромінювання, установлений на опорі за допомогою тримача пружний тепловий робочий елемент у вигляді першої еластичної полімерної смужки зі зверненим до випромінювання термочутливим прошарком і притиснуту до нього першу каретку у вигляді циліндра. Чутливість і точність переміщення цього приводу підвищені унаслідок виконання теплового робочого елемента з полімерної смужки, матеріал якої має низьку теплопровідність, у результаті чого забезпечується локалізація зони теплової деформації. Недоліком даного пристрою є недостатні надійність і питома потужність, обумовлені низкою жорсткістю конструкції в місці взаємодії полімерної смужки і каретки, малим ступенем теплової деформації смужки і недостатньою локалізацією зони цієї деформації. Цих недоліків позбавлений привід [А. с. СРСР № 18116058, МКВ-5 - F 03 G 7/06. Опубл. 07.02.90.], що містить нагрівач у вигляді джерела інфрачервоного випромінювання, установлений на опорі за допомогою тримача пружний тепловий робочий елемент у вигляді першої еластичної смужки зі зверненим до випромінювання термочутливим прошарком і притиснуту до неї першу каретку у вигляді циліндра, додатково обладнаний другою кареткою у вигляді циліндра і другою полімерною смужкою, обидві смужки виконані кільцевими, розміщені відповідно на бічних поверхнях першої і другої кареток термочутливими прошарками назовні і притиснуті останніми один до одного, причому кожна смужка з боку, протилежного термочутливому прошарку, додатково покрита матеріалом, що має контрастний стосовно матеріалу термочутливого прошарку коефіцієнт температурного розширення, виконаним суцільним або з доменною або дискретною структурою. Додатково обладнаний взаємодіючою із циліндром вихідною керуючою ланкою. Вихідна керуюча ланка встановлена з можливістю взаємодії з бічною поверхнею, щонайменше, одного циліндра. Краї смужок жорстко закріплені в основі циліндрів [прототип]. Притиснуті одна до одної каретки у вигляді циліндрів, на бічних поверхнях яких розміщені кільцеві полімерні смужки, звернені назовні термочутливими прошарками і покриті зсередини матеріалом із контрастним коефіцієнтом температурного розширення стосовно матеріалу прошарків, виконані суцільним або з доменною або дискретною структурою для підвищення зусилля, що розвивається і точності переміщення. Односторонній нагрів смужок тепловим випромінювачем викликає їх місцеву ви гибну де формацію, у результаті чого циліндри приводяться в зустрічне обертання. Проте в існуючому пристрої неможливо без додаткових допоміжних механічних компонентів здійснити імпульсні поступальні рухи. Задачею винаходу є одержати тепловий двигун, що дає змогу виконувати імпульсні поступальні рухи з керованими часовими параметрами. Дана задача досягається тим, що тепловий двигун, що містить нагрівач у вигляді джерела інфрачервоного випромінювання, встановлений у корпусі за допомогою тримача пружний тепловий робочий елемент у вигляді циліндра з першою та другою еластичними смужками, притиснутими одна до одної, виконаними кільцевими з матеріалу, що має контрастний по відношенню одна до одної коефіцієнт температурного розширення, виконаними суцільними або з доменною або дискретною структурою, звернений до випромінювання термочутливий прошарок, вихідна керуюча ланка встановлена з можливістю взаємодії з бічною поверхнею циліндра, краї смужок жорстко закріплені в основі циліндра, додатково містить охолодник, зазначений циліндр виконаний у вигляді порожнистої трубки або з термоізоляційним заповненням і додатково містить перший термоізолюючий прошарок із боку зазначеної другої кільцевої еластичної смужки, зазначене джерело інфрачервоного випромінювання виконано імпульсним, зазначені термочутливий прошарок і охолодник зв'язані з торцевими частинами зазначених еластичних кільцевих смужок з протилежних їх сторін, відповідно, зазначена вихідна керуюча ланка виконана у вигляді, принаймні, одного підпружиненого штовхача закріпленого в зазначеному корпусі, із можливістю взаємодії з бічною поверхнею циліндра з боку зазначеної першої кільцевої еластичної смужки, підпружинений штовхач додатково обладнаний другим термоізолюючим прошарком з боку зазначеної першої кільцевої еластичної смужки, протилежні кінці штовхачів є ви ходом пристрою. Додатково містить пружину стиснення, один кінець якої механічно зв'язаний із виступами, розташованими в середній частині зазначеного штовхача, а др угий — з обмежувачами отворів зазначеного корпусу. Додатково містить шайбу, установлену між зазначеною пружиною стиснення й обмежувачами отворів зазначеного корпусу. Оскільки зазначені відмітні ознаки відсутні в прототипу, запропоноване технічне рішення відповідає критерію "новизна". Технічним результатом винаходу є одержання багатофункціонального теплового приводу з гнучким динамічним керуванням. Таким чином, в отриманого пристрою з'являється властивість, що дозволяє за рахунок теплового впливу здійснювати імпульсний поступальний рух ви хідних керуючи х ланок із гнучко змінюваними часовими параметрами. Тепловий двигун (фіг.1-2), містить нагрівач 1 у вигляді імпульсного джерела інфрачервоного (ІЧ) випромінювання, оптично зв'язаний із встановленим у корпусі 2 за допомогою тримача 3 на порожнистій або з термоізолюючим заповненням трубці 4 через термочутливий прошарок 5 із торцевими поверхнями теплового робочого елемента у вигляді циліндра 6, виконаного у вигляді першої 7 та другої 8 кільцевих еластичних смужок із контрастним КТР, розташованих на трубці 4 коаксіально через перший термоізолюючий прошарок 9, протилежні торцеві поверхні зазначених кільцевих еластичних смужок 7 і 8 оптично зв'язані з охолодником 10, розташованим на протилежному кінці зазначеної трубки 4. Вихідна керуюча ланка у вигляді штовхачів 11, установлених із можливістю взаємодії з бічною поверхнею циліндра 6 з боку зазначеної першої 7 кільцевої еластичної смужки через сформований на взаємодіючих кінцях штовхачів 11 другий термоізолюючий прошарок 12, інші кінці зазначених штовхачів 11, що проходять через отвори з обмежувачами 13 у корпусі 2 (фіг.3), за допомогою зворотного механізму, виконаного у вигляді пружини стиснення 14, інший кінець якої зафіксований у виступах 15 зазначених штовхачів 11. Протилежний кінець зазначеної пружини стиснення 14 механічно зв'язаний через шайбу 16 із зазначеними отворами з обмежувачами 13. Вихідні кінці штовхачів 11 є ви ходом пристрою. Нагрівач 1 у вигляді імпульсного джерела інфрачервоного (ІЧ) випромінювання (фіг.1-2) призначений для керування тепловим двигуном. Корпус 2 є каркасом пристрою. Тримач 3 служить для кріплення теплового робочого елемента. Трубка 4 циліндра 6 є несучою конструкцією теплових компонентів. Термочутливий прошарок 5 є сполучною ланкою між імпульсним джерелом ІЧ випромінювання 1 і тепловим робочим елементом у вигляді кільцевих еластичних смужок 7 і 8. Перша 7 і друга 8 кільцеві еластичні смужки уявляють собою тепловий робочий елемент. Перший термоізолюючий прошарок 9 ізолює несучу конструкцію (трубку 4) від теплових процесів у тепловому робочому елементі. Охолодник 10 поглинає теплову хвилю від теплового робочого елемента щоб уникнути утворенню стоячих хвиль. Штовхач 11 призначений для передачі керуючого впливу від теплового робочого елемента до об'єкта керування. Другий термоізолюючий прошарок 12 запобігає паразитному відводу тепла від теплового робочого елемента в момент поширення хвилі теплової пружної деформації. Пружина стиснення 14 (Фіг.3) дозволяє штовхачу 11 знаходитися в робочому контакті з бічною поверхнею теплового робочого елемента у вигляді циліндра 6. Виступи 15, обмежувачі 13 і шайба 16 дозволяють пружині стиснення 14 виконувати свої пружні функції. Тепловий двигун працює таким чином. Тепловий імпульс від джерела ІЧ випромінювання 1 через термочутливий прошарок 5 поширюється в торці кільцевих полімерних смужок 7 і 8, виконаних із матеріалів із контрастним КТР. За умови, що тепловий робочий елемент складається з двох частин, із яких термочутливий прошарок має Â >0; С=0, сама полімерна смужка Â =0; С>0, а джерело тепла It, то одержимо граничну умову ¶t ¶t -l = a (J - t x=+0 ) - c ¢r¢h¢ , (1) ¶x x = _ 0 ¶t x=-0 де Â -температурний опір, град/Вт; С - теплоємкісний опір, Вт • ч/(м 2 • град); It - джерело тепла заданої температури; l - коефіцієнт теплопровідності смужки, Вт/(м 2 • град); 2 a - коефіцієнт тепловіддачі, Вт/(м • град); J - температура середовища, °С; t - температура смужки, °С; с' - питома теплоємність термочутливого прошарку, Вт.ч/(кг.град); r ' - щільність термочутливого прошарку, кг/м 3; h' - товщина прошарку ідеального провідника, м; t - час, ч. Причому, вн утрішній температурний опір полімерної смужки h (2) Âв н = , l де h - товщина смужки, м; а температурний опір термочутливого прошарку 1 (3) Â = . a При цьому критерій Біо Bi º Âв н Â = ah h = , l ht (4) де h t = l / a . Ми одержали умову теплообміну з зовнішніми температурними точками. У початковий момент часу при відсутності теплового впливу E t t =0 = t 0 = t =0 , (5) crV де t0 - початкова температура смужки, "С; E t=0 - кількість теплості в початковий момент часу, Дж; с - питома теплоємність смужки, Вт • ч/(кг • град); r - щільність смужки, кг/м 3; V - обсяг смужки, м 3. Торцевий імпульсний нагрів кільцевих еластичних смужок 7 і 8 тепловим випромінюванням викликає поширення теплової хвилі, і, як слідство, — поверхневої де формаційної хвилі. З узагальненого закону Гука, припускаючи, що деформація по ширині смужки відсутня [ [ ( [ ( )] 1 dx - m dy + dz (6) E 1 ey = d - m(d x + d z ) ( 7) E y 1 ez = dz - m dx + dy (8) E де e - деформація; dx, dy, dz - нормальні напруги; m - коефіцієнт Пуасона; Е - модуль пругкості. Для розуміння процесу, що відбувається, можна перейти до уявлення елементарного елемента як платівки. При цьому динаміка системи супроводжується поширенням теплової хвилі по пружному елементі. Проте наявність тіла циліндру забезпечує консервативність системи. При цьому, припускаючи, що існує плоска хвиля Т(x,y,z,t) = T(t,z). Для випадку теплового розширення пластини одержимо диференціальне рівняння хвилі у вигляді ¶T ¶ é ¶T ù c = ( 9) ê l (z ) ú. ¶t ¶z ë ¶z û Пов'язуємо градієнт температури з градієнтом напруг через коефіцієнт теплопровідності ex = ] )] d2 d(x ) (10) = bUT1, dx 2 де r - щільність; Т1 = Т – Т0 = D T. Після заміщення, рішення цього рівняння дає хвилю напруг lFr l Fr d 2 d (x ) (11) = bd( x) dx 2 у зв'язку з тепловою деформацією, на поверхні першої кільцевої смужки 7 утворяться опуклості у виді горбиків, під впливом яких штовхачі 11 здійснюють поступальний рух і впливають на об'єкт керування. Раніше нагріті ділянки смужок 7 і 8, «покинуті» тепловою хвилею, остигають за рахунок відводу тепла в навколишнє середовище з більш низькою температурою і відновлюють свою початкову форму після тимчасового і незначного нагрівання (горбики зникають). У основі цього теплового двигуна закладена тимчасова теплова пружна деформація теплового робочого елемента. При існуючому теплообміні раніше нагрітої зони смужки з навколишнім середовищем і з охолодником 10, виконується функція відновлення теплової пружної деформації і довжина полімерних смужок зберігається постійною. Деформація ізотропного пружного середовища r F= rü E ì r 1 grad ,di nSý = 0 . (12 ) í DS + 2(1 + m) î 1 - 2m þ r Дисипація системи пов'язана з dinS для хвилі в пружному середовищі r r d2 S F =r . Припущення консервативності системи призводить до пари умов: dt 2 r ü r E 2 r DS ï d S 2(1 + m) F =r = (13) ý, r dt 2 graddinS = 0ï þ r що визначає умову існування хвилі dinu = const, і що для смужки du = const припустимий зсув у вигляді dx u(x)=C0 x+C1 (14) носить лінійний характер. Таким чином, для забезпечення умов існування хвилі деформації з мінімальним загасанням, необхідно виконати умову відсутності дисипації і забезпечити відповідний профіль деформації, що досягається з використанням теплових ефектів. При імпульсному впливі потоку 14 випромінювання штовхачі 11 приводяться в рух. Здійснення поступального руху можна уявити на прикладі формул для практичного розрахунку. Припустимо, що тепловий робочий елемент виконаний із полімерних матеріалів із контрастним КТР (наприклад, поліетилен— терефталат і полі—гетра—фтор—етилен) товщиною а, жорстко сполучених між собою уздовж поверхні зіткнення. Тепер можна обчислити радіус вигину R теплового робочого елемента при температурі t2 якщо при температурі t1 вигин відсутній. Якщо нагрітий тепловий робочий елемент буде вигнутий по дузі w, то довжина середньої лінії зовнішньої і внутрішньої смужок буде l 1 = w R1 i l 2 = wR 2 , a a ,a R 2 = R - . 2 2 Подовження середньої лінії при нагріванні буде приблизно таким же, як і подовження відповідної вільної полімерної смужки. Виходячи з цього R1 = R + æ aö wç R + ÷ = l 0 (1 + a ПТФЕ t ); 2ø è (15 ) æ aö wç R - ÷ = l 0 (1 + a ПEТФ t ), (16 ) 2ø è де, a ПTФE і a ПЕТФ - коефіцієнти лінійного розширення полімерних смужок полі—тетра—фтор—етилену і поліетилен—терефталату, відповідно. Розділивши рівняння (15) на рівняння (16) одержимо: aö æ aö æ çR + ÷ / ç R - ÷ = (1 + a ПТФЕ t ) / (1 + a ПEТФt ). 2ø è 2ø è (17 ) У результаті одержимо радіус вигину: æaö R = ç ÷{[2 + (a ПТФЕ + a ПЕТФ )t ] / t (a ПТФЕ - a ПЕТФ )} , (18 ) è2ø який викликає напругу й обумовить створення горбиків, що сприяють виникненню поверхневої деформаційної хвилі. Вихідні керуючі ланки штовхачів 11 можуть бути з'єднані до об'єктів керування. Тяговий керуючий вплив, що виходить від теплового двигуна, можна одержати шляхом з'єднання вихідної керуючої ланки через двоплечий важіль. Теплова деформаційна хвиля за рахунок теплової пружної деформації у твердому тілі, породжує поверхневі акустичні хвилі (П АХ). Приклад утворення Релєївської хвилі в півпросторі, описаний у [Рэлеевские волны в полупространстве В кн.: Д.Морган. Устройства обработки сигналов на 11 поверхностных акустических волнах: Пер. с англ. - М.: Радио и связь, 1990. - с. 31-33.]. Рішення для ізотропних середовищ [E.Dieulesaint and D.Royer. Elastic Waves in Solids, Masson, 1974 (in Franch); Wiley, 1980 (in English).], [B.A.Auld. Acoustic Fields and Waves in Solids. Vol. I, Wiley, 1973.], [I.A.Viktorov. Rayleigh and Lamb Waves. Plenum Press, 1967.], [T.R.Meeker and A.H.Meitzler. Guided wave propagation in elongated cylinders and plates. - in W.P.Mason (ed.). Physical Acoustics, Vol. 1A, Academic Press, 1964, - PP. 112-167.], [A.A.Oliner. Microwave network methods for guided elastic waves. IEEE Trans. MTT-17, 1969. - PP. 812-826.], [M.Redwood. Mechanical Waveguides, Pergamon, I960.], [Lord Rayleigh. On waves propagated along the plane surface of an elastic solid. Proc. London Math. Soc. № 17, 1885. - PP. 4-11.], [W.M.Ewing, W.S.Jardetzky and F.Press. Elastic Waves in Layered Media. McGraw-Hill, 1957.], [L.M.Brekhovskikh. Waves in Layered Media. Academic Press, 1960 and 1980.] мають багато загального з рішеннями для анізотропних матеріалів. Пругкість характеризується внутрішніми силами, що виникають в об'ємі твердого тіла при його зсуві з положення рівноваги. Тверде тіло рахується однорідним. Сили можна описати через пружні напруги Т, а переміщення - через деформації S. Якщо в положенні рівноваги деяка частка матеріалу розташований у точці з радіусом-вектором x = (х1, х2 , х3), те коли матеріал виведений із положення рівноваги, ця частка буде відчувати зсув u = (u1 , u2 , u3), проекції котрого u1, u2 і u3 залежать від координат х1 , х2 , х3 . Виведена з рівноваги частка переміщується з положення х у положення x + u. Де формація в кожній точці визначається вираженням ¶u j ö 1 æ ¶u ÷, i, j = 1,2,3. S ij x1, x 2 , x 3 = ç i + (19) ç ¶x j ¶x i ÷ 2è ø Деформація описується симетричним тензором другого рангу Sij = Sji (20) у котрому тільки шість із дев'ятьох компонентів надаються незалежними. Внутрішні сили у твердому тілі описуються тензором механічних напруг Tij. Для цього уявимо площину x1 = х’1 усередині матеріалу, де х’1 - константа. Під час деформації з однієї сторони площини на матеріал, надається силовий вплив і з іншого боку, і, крім того, може залежати від координат (х2 , х3), визначених у площині. Механічна напруга визначається тим, що компонент Ті1 (х’1, х2, х3) дорівнює проекції цієї сили в напрямку осі хі, віднесеної до одиничної площадки, а і може приймати значення 1, 2, 3. Тензор механічних напруг є симетричним тензором другого рангу, для котрого Тij – Тji (21) У пружних матеріалах механічні напруги пропорційні деформаціям, якщо самі деформації невеликі. Це співвідношення узагальнює закон Гука, що зв'язує напругу і деформацію в одномірному випадку. Тому кожний компонент тензора механічних напруг буде виражатися лінійною комбінацією компонентів тензора деформацій. Відповідні коефіцієнти утворять тензор пружних модулів сijkl, заданий рівністю ( Tij = ) å åc k ijkl S kl , i, j, k, l = 12,3. , (22) l Кількість незалежних елементів пов'язана з фізичними властивостями самого матеріалу, а якщо матеріал симетричний, те кількість незалежних елементів зменшується. Наприклад, кристалічний матеріал кубічної симетрії має тензор лише з трьома незалежними елементами. У загальному випадку осі координат х1, х2 , х3 не збігаються з осями кристалічної чарунки. Якщо напруга і деформація залежать від часу і координат, то згадані рівняння повинні бути доповнені законами Ньютона, що дасть можливість одержати рівняння руху. Наприклад, усередині матеріалу елементарний куб із центром х' = (х'1 , х'2, х'3 ). Ребра куба паралельні осям х1, х2, х3 і мають довжину d кожне. Матеріал, що оточує куб, створює сили, що діють на всі шість граней. На грані, розташовані при х1 = х' 1 ± d /2, в напрямку х1 діють сили, проекції яких ± d 2Tі1.(x’ 1 ± d /2, x’ 2, x’3). Так само можна визначити сили, що діють на грані, перпендикулярні осям х2 і x3. Складаючи всі ці сили, знаходимо результуючу силу, що діє на куб. Якщо d - мала é величина, то результуюча сила має хі - проекцію, рівну d 3 ê ê ë ¶Tij ù ú . Дана проекція сили повинна дорівнювати ú j û x' å ¶x j ( ) прискоренню ¶ 2u i X ' / ¶t 2 , помноженому на масу rd3 , де r р — щільність. Це справедливо для будь-яких точок Х’, о тже 2 ¶Tij ¶ ui r = , i, j = 1,2,3, (23) 2 ¶x j ¶t j å що являє собою рівняння руху. Тензор пругкості С ijkl ізотропного матеріалу має тільки два незалежних компоненти і з розумінь симетрії цей тензор записується в такій формі: C ijkl = ld ij d kl + m d ik d jl + dil d jk , (24) ( ) де d ij = 1 для і = j і d ij = 0 для і ¹ j. Постійні l i m , названі константами Ламе, на практиці завжди позитивні. Постійну m , називають також модулем зсуву. Підставивши вираження (24) у рівняння (22) механічну напругу можна уявити у ви гляді Tij = ld ij D + 2 mS ij , (25) де ¶u i D= Sii = . (26) ¶x i i i å å Рівняння руху (23) з урахуванням рівності (25) прийме вигляд r ¶ 2u j ¶t = (l + m ) 2 де Ñ 2 = ¶D + mÑ 2 u j , ¶x j ¶2 å ¶x i 2 i (27) . При поширенні плоскої хвилі з круговою частотою (О, вектор зсуву якої буде дорівнювати u = u0 exp[j(wt - k × x )], (28) де U 0 - деякий постійний вектор, що не залежить від х і t. Фактично вектор зсуву дорівнює дійсній частині вираження (28), проте через лінійність рівнянь скрізь можна використовувати комплексну форму запису. Хвилястий вектор k = (k 1, k2, k3) задає напрямок поширення. Хвилястий фронт, обумовлений із рішення рівняння k • х = const, перпендикулярний вектору k. Фазова швидкість хвилі V = w / k . Такому вектору u відповідають похідні ¶u / ¶x j = - jk ju . На фіг. 4 [Рис. 2.2. в кн.: Д.Морган. Устройства обработки сигналов на поверхностных акустических волнах: Пер. с англ. - М.: Радио и связь, 1990. — С. 31—33.] поданий графік нормованої швидкості релєївських хвиль в ізотропних матеріалах. Vt - фазова швидкість поперечних хвиль, рівна (29) Vt = m / r. Vl - фазова швидкість подовжніх хвиль (l + 2m / r), Vl = (30) тому що l i m завжди позитивні, то швидкість подовжніх хвиль завжди більше швидкості поперечних хвиль. Внаслідок того, що в напрямку поширення хвилястого вектора зсуву змінюються за законом exp (- jbc 1 ) , де b - хвилясте число релєївської хвилі, фазова швидкість релєївської хвилі VR буде дорівнювати VR = w / b . (31) Відношення VR / Vt залежить від відношення швидкостей плоских хвиль Vl / Vt і визначає релєївську швидкість у будь-якому ізотропному матеріалі. Значення швидкості VR звичайно достатньо близьке до Vt і не залежить від частоти. Опускаючи множник exp[j(w t - b x 1 )] і довільні константи, зсуви можна висловити у вигляді u 1 = g exp (a b x 3 ) - exp (b b x 3 ), [ ] (32) -1 u 3 = ga exp (ab x 3 ) - b exp (bb x 3 ), де а, b і g - дійсні позитивні розміри, обумовлені співвідношеннями: ( ) 2 a = - jL / b , b= - jT / b , g = 2 - VR / Vt2 /(2ab) і b = w / VR . Символами T i L позначені x3 - проекції (напрямок поширення паралельно до нормалі), що визначаються відповідно T 2 = w2 / V t2 - b 2 , 2 L =w 2 / Vl2 2 -b . (33) (34 ) Залежність цих зсувів від глибини, нормованої щодо довжини релєївської хвилі l R = 2p VR / w, подані на фіг. 5. На фіг.5 [Рис. 2.3. в кн.: Д.Морган. Устройства обработки сигналов на поверхностных акустических волнах: Пер. с англ. - М.: Радио и связь, 1990. - с. 31-33.] поданий графік розподілу зсувів у релєївській хвилі, що поширюється в ізотропному матеріалі (плавленому кварці, Vl / Vt = 1,48). На фіг.6 [Рис. 2.4. в кн.: Д.Морган. Устройства обработки сигналов на поверхностных акустических волнах: Пер. с англ. - М.: Радио и связь, 1990. - с. 31-33.] подана миттєва картина зсувів при поширенні релєївської хвилі в ізотропному матеріалі. Тому що u3 знаходиться в квадратурі з u1 (32), то траєкторія руху кожної частки являє собою еліпс. Знак щ змінюється на протилежний на глибині приблизно 0,2 довжини хвилі. Тому еліптичний рух має різноманітні напрямки нижче і вище цієї точки; на поверхні напрямок руху часток протилежний напрямку поширення хвилі, у той час як у глибині ці напрямки збігаються. Деформація матеріалу (без дотримання масштабу) у визначені моменти часу зображена на фіг. 6. Точки являють собою положення рівноваги часток усередині матеріалу, а лінії відбивають зсуви через релєївську хвилю. На глибині більш однієї довжини хвилі р уху практично відсутні. Поглинач теплової енергії (охолодник) 10 (фіг.1.) перешкоджає утворенню стоячих хвиль, що можуть заважати появі ПАХ. Він уявляє собою як теплове, так і механічне навантаження і виконаний, наприклад, із масивного ізотропного матеріалу або шарува тої стр уктури. Такі хвилі виникають при додаванні падаючої одномірної хвилі æ w ö y 1 = A sinç w - z÷ (35) c ø è з хвилею, відбитою від менш або більш щільного середовища æ w ö y 2 = A sinç wt + z ÷, (36) c ø è де A - амплітуда коливання, w = 2p / T - кругова частота, із = dz/dt - швидкість поширення хвилі, z = nr, n одиничний вектор нормалі до фронту хвилі (уздовж осі z), r - радіус-вектор будь-якої із точок поверхні фронту хвилі. Тоді стояча хвиля y буде мати вигляд 2p z (37) y = y1 + y 2 = 2 A cos sin wt. l У найбільш загальному випадку стояча хвиля описується вираженням (38) y (z, t ) = A(z) cos(wt + j ), де j - фаза коливання. Амплітуда A (z) залежить від координати положення рівноваги z по гармонійному закону 2p z 2p z (39) A (z ) = A sin + B cos , l l де А і В - постійні, l - довжина хвилі, тобто відстань, на якій відбувається одне повне коливання. У формулах (38) і (39) необхідно врахувати граничні умови. У випадку, якщо y (z, t ) описує коливання струни довжиною L, закріпленої на кінцях: (40) y (0, t ) = 0, y(L, t ) = 0, то на цих умовах випливає, що В = 0 і 2p L (41) sin = 0. l Рівність (41) визначає довжини l усі х можливих хвиль, що описують коливальні моди 2p L (42) = p, 2 p, 3 p, 4 p,..., l тобто, стояча хвиля може утворюватися тільки в тому випадку, якщо L, кратне цілому числу напівхвиль l / 2 . Цим модам відповідають частоти n 1 = c / l 1, n 2 = 2n 1, n 3 = 3n1 , n 4 = 4n 1, ... (43) Частоти n 2 , n 3 , n 4 , і т.д. є гармоніками основної частоти n 1 . Причина порушення гармонійної послідовності частот складається в тому, що фізичні системи не є абсолютно пружними. Властивість (43) виконується тільки для абсолютно пружних і однорідних твердих тіл. Акустичні коливання формують ПАХ на зовнішній поверхні робочого елемента. У результаті цього відбувається пружна деформація межі зовнішньої поверхні 7 (фіг.6.). Зсув поверхні 7 відбувається в напрямку від термочутливого прошарку 5 до охолодника 10 (фіг.1.), що гасить коливання щоб уникнути утворенню стоячої хвилі (див. формули (35) - (43)). У результаті проходження деформаційної хвилі, штовхачі 11, установлені з можливістю механічного контакту з поверхнею циліндра 6, що є вихідною керуючою ланкою теплового двигуна, виконують зворотно-поступальний рух. У порівнянні з прототипом, що обмежує області застосування пристрою, запропоноване технічне рішення дозволяє одержати тепловий двигун, за допомогою котрого можливо здійснення імпульсного силового впливу з керованими часовими параметрами для керування зовнішніми пристроями з мінімальними енергетичними і витратами часу. Застосування винаходу дасть можливість одержати більш досконалі конструкторські рішення, що зможуть використовува тися в якості, наприклад, відомого колінчатого вала в двигуна х внутрішнього згоряння. Це дозволить скоротити тривалість виробничого циклу, скоротити виробничі енерговитрати, мінімізувати рентабельні обсяги продукції, що вип ускається.
ДивитисяДодаткова інформація
Назва патенту англійськоюHeat engine
Автори англійськоюPylypenko Mykola Vadymovych, Khodakov Viktor Yehorovych
Назва патенту російськоюТепловой двигатель
Автори російськоюПилипенко Николай Вадимович, Ходаков Виктор Егорович
МПК / Мітки
МПК: F03G 7/06
Код посилання
<a href="https://ua.patents.su/8-67270-teplovijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Тепловий двигун</a>
Тепловий двигун

Номер патенту: 44336
Опубліковано: 15.02.2002
Автор: Марковський Володимир Кіндратович
МПК: F02G 1/00
Формула / Реферат:
1. Тепловий двигун, що містить циліндр, робочий поршень, розміщений у циліндрі, який розділяє об'єм циліндра на порожнини і кінематично зв'язаний за допомогою механічного робочого органу з валом відбору потужності, нагрівач і холодильник, який відрізняється тим, що двигун містить принаймні одну пару циліндрів з розміщеними в них робочими поршнями, один з яких жорстко з'єднаний з плунжером насоса, розміщеного у покришці циліндра, а другий...
Тепловий сонячний двигун
Номер патенту: 55114
Опубліковано: 17.03.2003
Автори: Кіскіна Наталія Олександрівна, Селезньов Юрій Володимирович
МПК: F03G 7/00
Мітки: тепловий, сонячний, двигун
Формула / Реферат:
1. Тепловий сонячний двигун, що містить сонячне джерело нагрівання робочого тіла, у фокусному просторі якого розміщений теплообмінник, два робочих циліндри, з'єднаних трубопроводами з теплообмінником, який відрізняється тим, що в кожному циліндрі розміщений ротор у вигляді ексцентрично розташованого диска з прилеглою до нього поворотною заслінкою, що розділяє робочу порожнину циліндра на дві порожнини: всмоктувальну і нагнітальну - у першому...
Рідинний тепловий двигун
Номер патенту: 41562
Опубліковано: 17.09.2001
Автор: Іваницький Михайло Васильович
МПК: F01B 19/00
Мітки: тепловий, двигун, рідинний
Формула / Реферат:
Рідинний тепловий двигун, що складається з гідравлічної турбіни електричного генератора , який відрізняється тим, що як робоче тіло використовують рідину, яка поміщена у закриту металеву ємність так, щоб заповнити внутрішній її об"єм повністю, підігріваючи робоче тіло та збільшуючи внутрішню енергію підвищують тиск, який через перетворювач потенційної енергії в механічну виконує корисну роботу.
Тепловий двигун

Номер патенту: 49879
Опубліковано: 15.10.2002
Автор: Скрипій Ананій Олексійович
МПК: F01K 25/00
Формула / Реферат:
1. Тепловий двигун, який складається з послідовно включених нагрівача, пароперегрівача, детандера, конденсатора, частково заповненого рідким робочим тілом, та живильного насоса, який відрізняється тим, що він обладнаний холодильним агрегатом у складі компресора та камери охолодження, що містить нагрівач, причому вихід агрегату з’єднаний з відповідним входом детандера, а вхід – з верхом...
Тепловий двигун
Номер патенту: 35492
Опубліковано: 15.03.2001
Автори: Гогуля Андрій Михайлович, Васильєв Ігор Павлович, Данілейченко Олександр Анатолійович, Крайнюк Андрій Олександрович, Крайнюк Олександр Іванович
МПК: F03G 7/06
Формула / Реферат:
1. Тепловий двигун, який містить статор з секторами підведення і відводу теплоти, що охоплюють частину поверхні ротора, де містяться попарно з'єднані каналами вічка постійного об'єму, який відрізняється тим, що канали виконані в статорі паралельно один одному і розміщені поза зоною секторів підведення і відводу теплоти, кожне вічко ротора має вихідний отвір, розміщений на поверхні, сполученій зі статором, причому безпосередньо за сектором...
Попередній патент: Спосіб отримання вуглецевого наноструктурного матеріалу
Наступний патент: Подрібнювач-диспергатор
Випадковий патент: Об'ємна передача транспортного засобу