Спосіб кластерного моделювання бездротової сенсорної мережі
Номер патенту: 93269
Опубліковано: 25.09.2014
Автори: Балабан Степан Миколайович, Чиж Віталій Михайлович, Міколай Карпіньскі син Пйотра
Формула / Реферат
Спосіб кластерного моделювання бездротової сенсорної мережі, що полягає у вимірюванні відстані між сенсорами, реконструюванні топологічної поверхні сенсорної мережі, обчисленні віртуальної позиції кожного сенсора, аналізі візуалізованої форми реконструйованої топологічної позиції кожного сенсора з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками, які представляють сенсори, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси ![]() , які при побудові мають форму ромбів, де
, які при побудові мають форму ромбів, де ![]() - сигнальна точка,
- сигнальна точка, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , - номери сигнальних точок, та виявленні атакованих сенсорів, який відрізняється тим, що кожні вісімнадцять сигнальних точок об'єднують у кластер у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що шість сигнальних точок є вершинами внутрішнього шестикутника і мають п'ять функціональних зв'язків, інші шість сигнальних точок є вершинами зовнішнього обвідного шестикутника і мають три функціональні зв'язки, останні шість сигнальних точок є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки.
, - номери сигнальних точок, та виявленні атакованих сенсорів, який відрізняється тим, що кожні вісімнадцять сигнальних точок об'єднують у кластер у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що шість сигнальних точок є вершинами внутрішнього шестикутника і мають п'ять функціональних зв'язків, інші шість сигнальних точок є вершинами зовнішнього обвідного шестикутника і мають три функціональні зв'язки, останні шість сигнальних точок є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки.
Текст
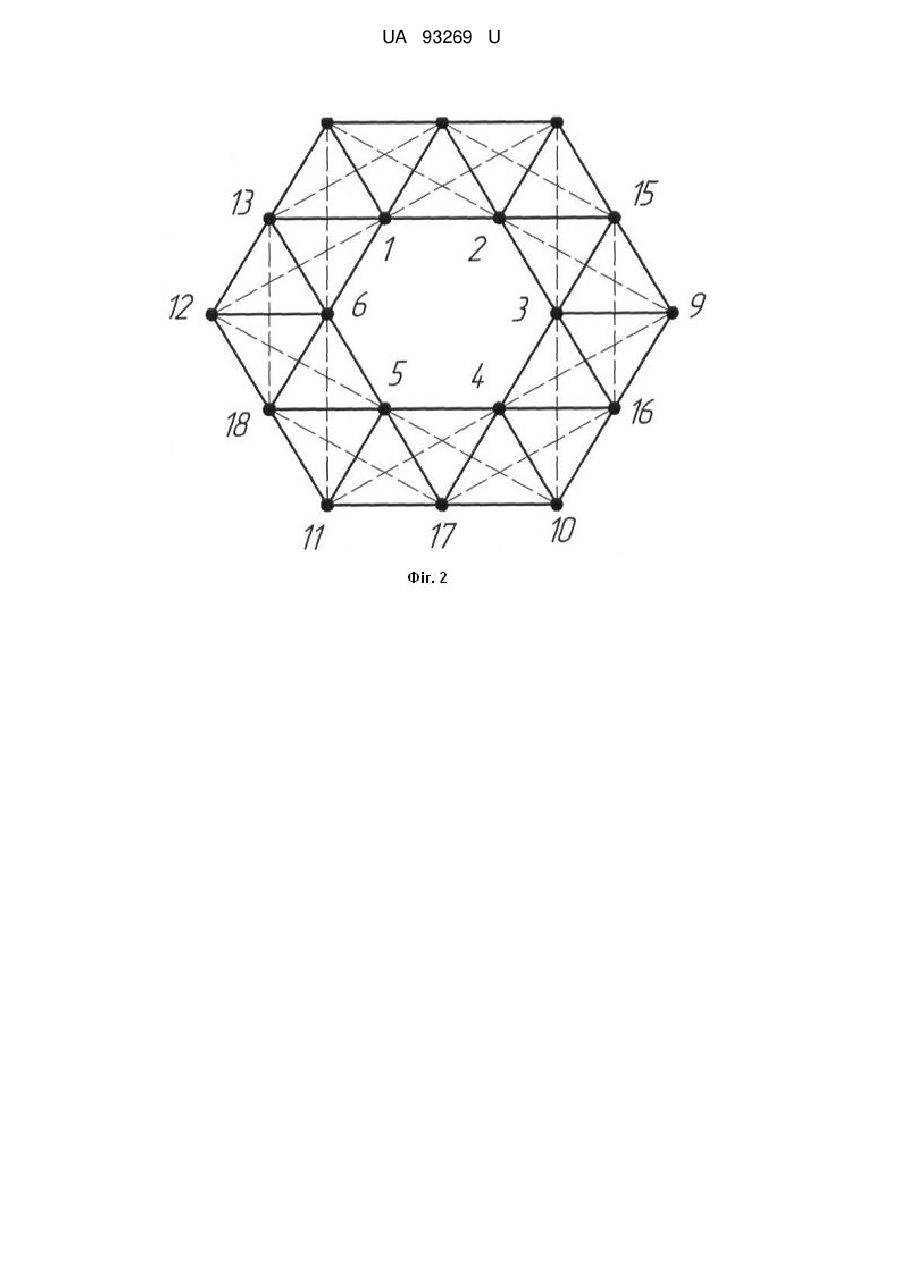
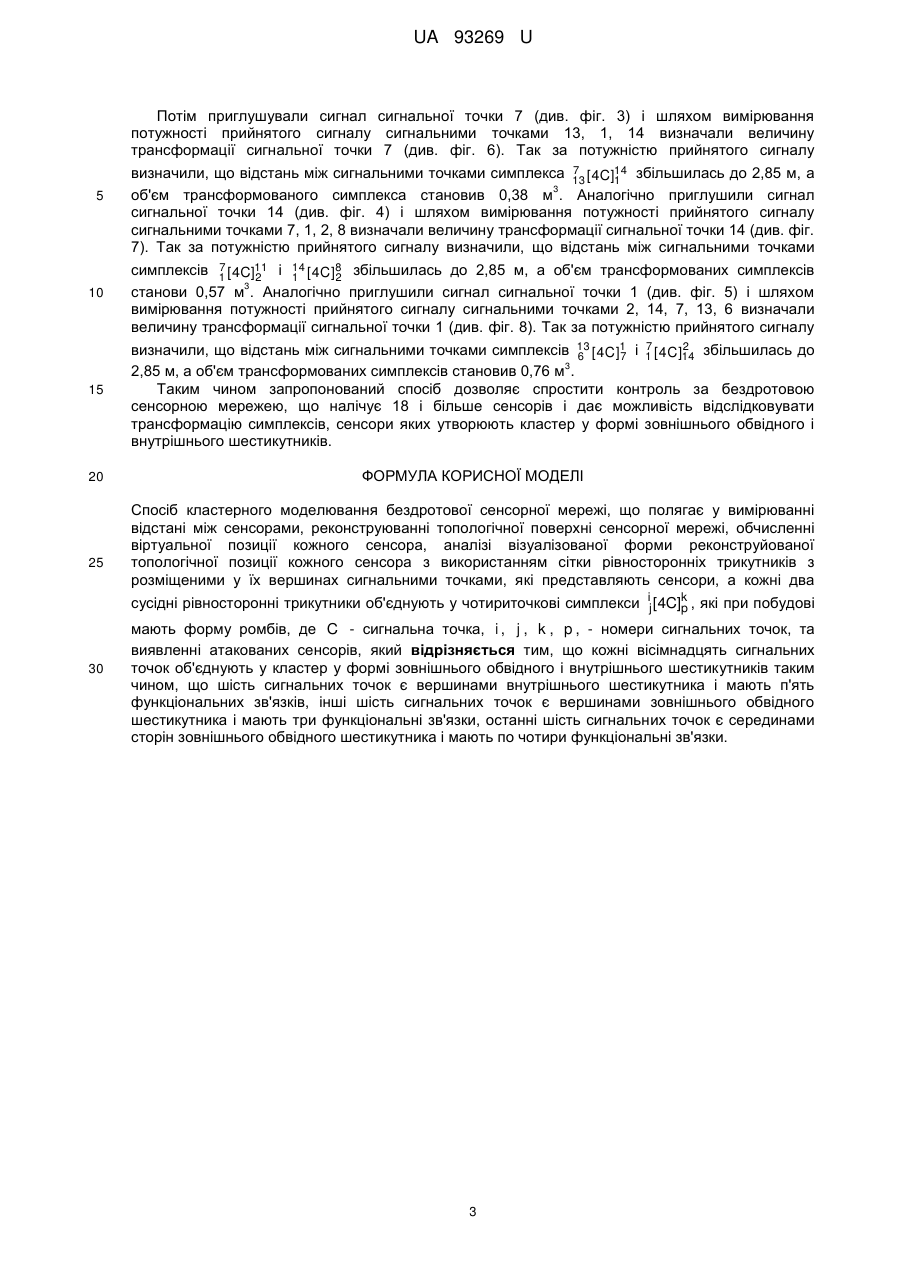
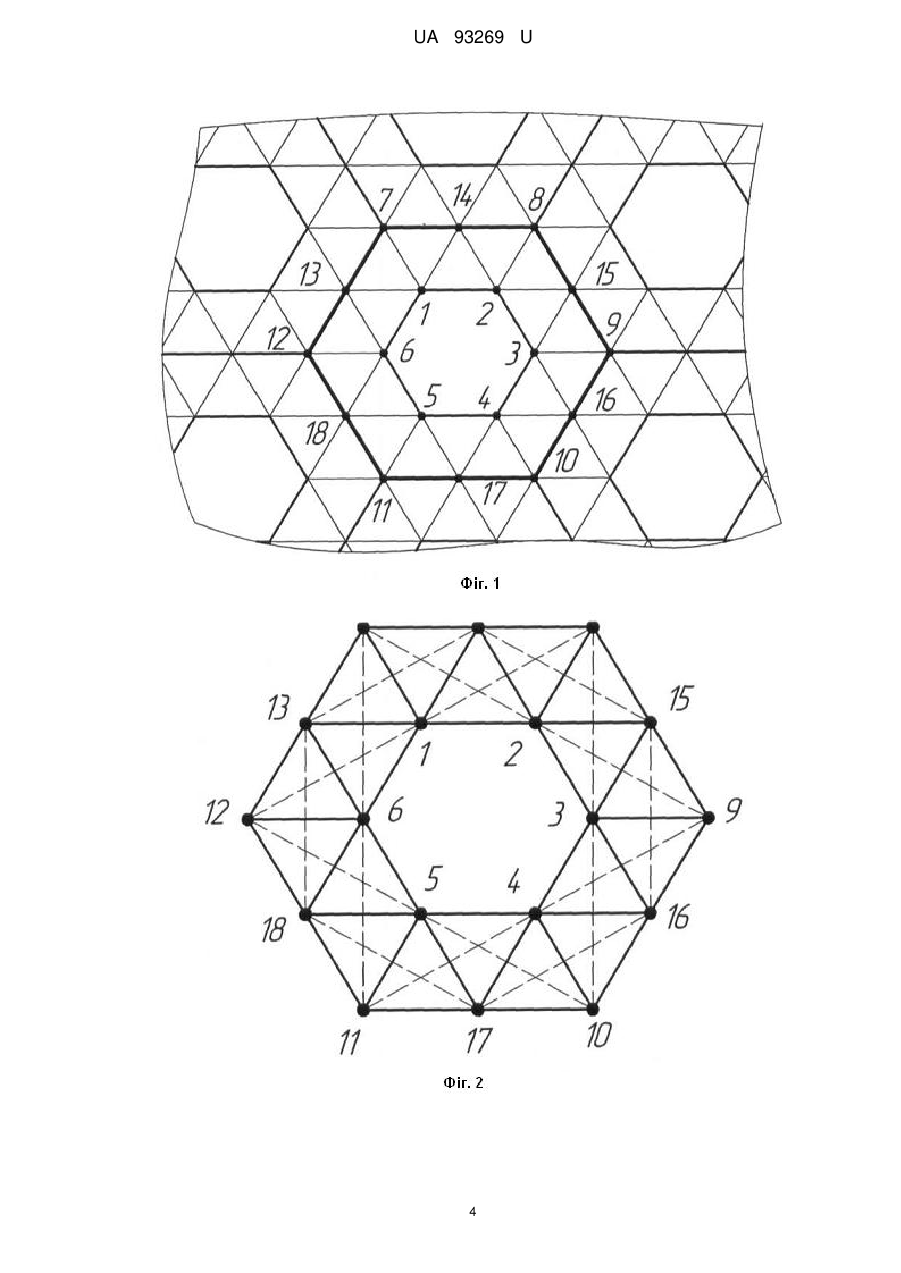
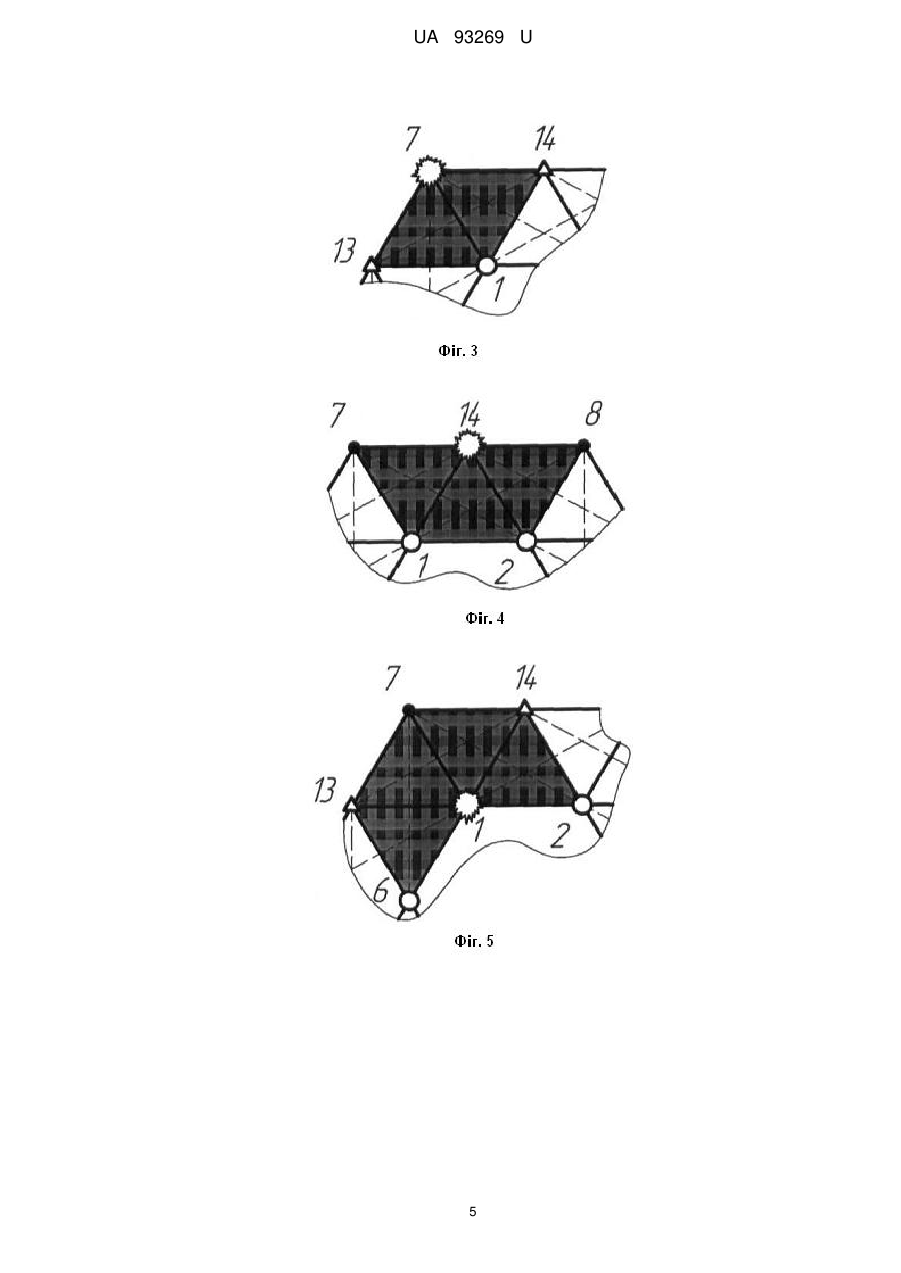
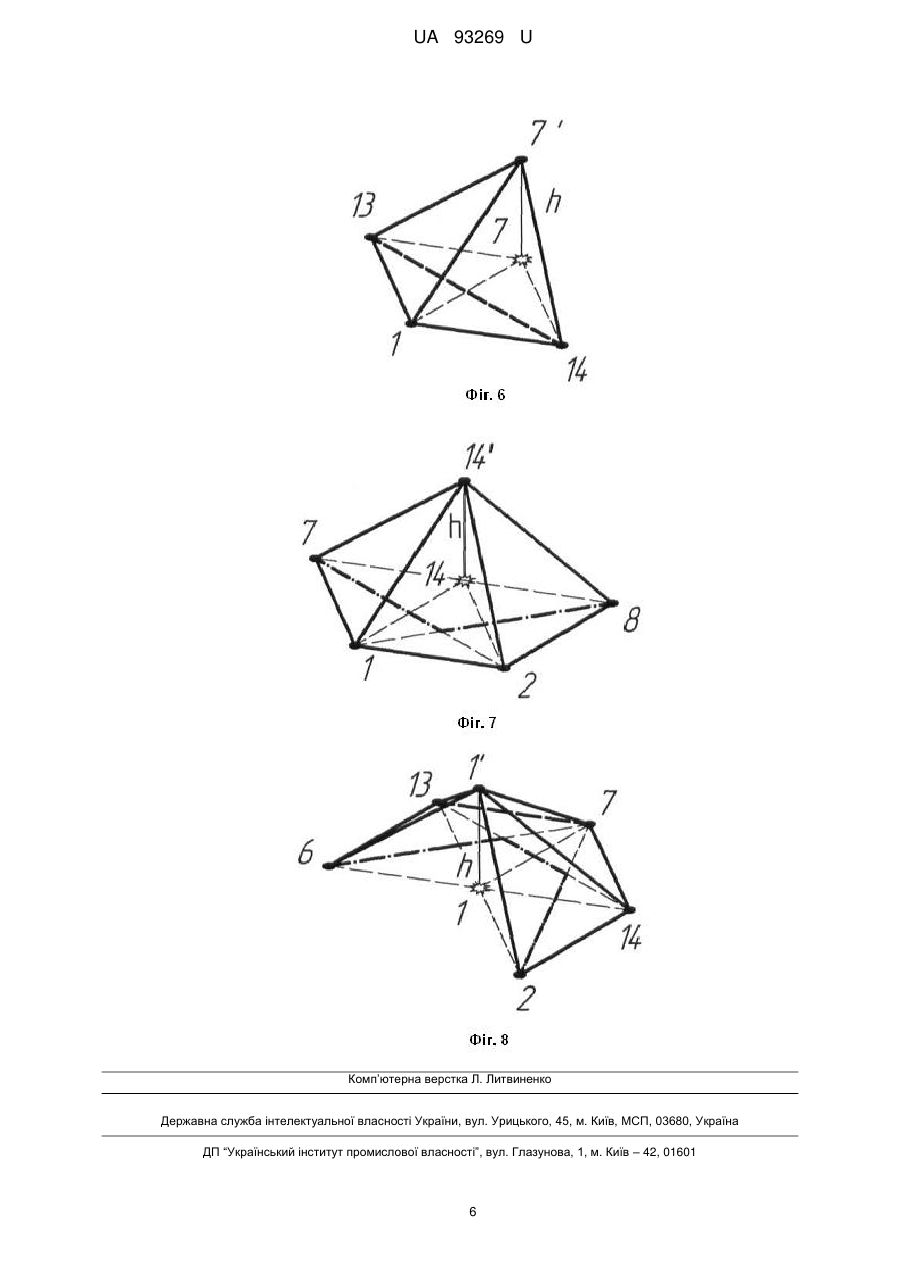
Реферат: Спосіб кластерного моделювання бездротової сенсорної мережі полягає у вимірюванні відстані між сенсорами, реконструюванні топологічної поверхні сенсорної мережі, обчисленні віртуальної позиції кожного сенсора, аналізі візуалізованої форми реконструйованої топологічної позиції кожного сенсора з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками, які представляють сенсори, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси ij [4C]k , які при побудові p мають форму ромбів, де C - сигнальна точка, i , j , k , p , - номери сигнальних точок, та виявленні атакованих сенсорів. Крім цього, кожні вісімнадцять сигнальних точок об'єднують у кластер у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що шість сигнальних точок є вершинами внутрішнього шестикутника і мають п'ять функціональних зв'язків, інші шість сигнальних точок є вершинами зовнішнього обвідного шестикутника і мають три функціональні зв'язки, останні шість сигнальних точок є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки. UA 93269 U (12) UA 93269 U UA 93269 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель стосується бездротових сенсорних мереж, зокрема їх комп'ютерної візуалізації, і може бути використана у інформаційних, промислових та спеціалізованих системах, які експлуатують у різних галузях народного господарства. Відомий спосіб візуалізації атаки червоточин у бездротовій сенсорній мережі, що полягає у вимірюванні відстані між сенсорами, реконструюванні топологічної поверхні сенсорної мережі, обчислюванні віртуальної позиції кожного сенсора, аналізі візуалізованої форми реконструйованої топологічної позиції кожного сенсора з використанням сітки трикутників з розміщеними у їх вершинах сенсорами з координатами у евклідовому просторі та виявленні 8 атакованих сенсорів (див. Патент України № 47011, від 25.03.2011 МПК H04W 12/12, бюл. Промислова власність № 21, 2011). Недоліком вказаного способу є неможливість відстежити рівень пошкодження сигналу окремого сенсора або невеликої групи компактно розташованих сенсорів, неможливість візуалізації атак непов'язаних зі зміною сили сигналу. Найбільш близьким до запропонованої корисної моделі служить спосіб симплексного моделювання бездротової сенсорної мережі, що полягає у вимірюванні відстані між сенсорами, реконструюванні топологічної поверхні сенсорної мережі, обчислюванні віртуальної позиції кожного сенсора, аналізі візуалізованої форми реконструйованої топологічної позиції кожного сенсора з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками, які представляють сенсори, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси ij [4C]k ,які при побудові мають форму ромбів, де C p сигнальна точка, i , j , k , p , - номери сигнальних точок, та виявленні атакованих сенсорів (див. Патент України № 82856, від 27.08.2013 MПK H04W 12/12 (2009.01), бюл. Промислова власність № 16, 2013). Недоліками прототипу є складність контролю за бездротовою сенсорною мережею, що налічує велику кількість сенсорів, і неможливість відслідковування трансформації симплекса, в якому атакований сенсор розміщений на кінці великої діагоналі ромба. В основу корисної моделі поставлено задачу спрощення контролю за бездротовою сенсорною мережею, що налічує велику кількість сенсорів і одержання можливості відслідковування трансформації симплекса в якому атакований сенсор розміщений на кінці великої діагоналі ромба шляхом моделювання бездротової сенсорної мережі, що полягає у вимірюванні відстані між сенсорами, реконструюванні топологічної поверхні сенсорної мережі, обчислюванні віртуальної позиції кожного сенсора, аналізі візуалізованої форми реконструйованої топологічної позиції кожного сенсора з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками, які представляють сенсори, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси ij [4C]k , які при p побудові мають форму ромбів, де C - сигнальна точка, i , j , k , p - номери сигнальних точок, та виявленні атакованих сенсорів, причому, кожні вісімнадцять сигнальних точок об'єднують у кластер у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що шість сигнальних точок є вершинами внутрішнього шестикутника і мають п'ять функціональних зв'язків, інші шість сигнальних точок є вершинами зовнішнього обвідного шестикутника і мають три функціональні зв'язки, останні шість сигнальних точок є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки. На фіг. 1 показано фрагменти схеми реконструйованої топологічною позицією кожного сенсора з результатами об'єднання чотириточкових симплексів у кластер, на фіг. 2 показано схему кластера, на фіг. 3 показано фрагмент схеми кластера при здійсненні атаки на сигнальну точку, що має три функціональні зв'язки, на фіг. 4 показано фрагмент схеми кластера при здійснення атаки на сигнальну точку, що має чотири функціональні зв'язки, на фіг. 5 показано фрагмент схеми кластера при здійсненні атаки на сигнальну точку, що має п'ять функціональних зв'язків, на фіг. 6 показано схему візуалізації атаки на сигнальну точку, що має три функціональні зв'язки, на фіг. 7 показано схему візуалізації атаки на сигнальну точку, що має чотири функціональні зв'язки, на фіг. 8 показано схему візуалізації атаки на сигнальну точку, що має п'ять функціональних зв'язків. Спосіб реалізується таким чином. Вимірюють відстані між сенсорами, використовуючи моделювання похибки вимірюванні відстані між сенсорами змішаним шумом. Реконструюють топологічну поверхню сенсорної мережі з допомогою тріангуляції Делоне і обчислюють віртуальні позиції кожного сенсора. Аналіз візуалізованої форми реконструйованої топологічної позиції кожного сенсора проводять, використовуючи сітку рівносторонніх трикутників, у вершинах яких розміщені сенсори. При цьому кожні два сусідні рівносторонні трикутники 1 UA 93269 U об'єднують у чотириточкові симплекси ij [4C]k , які при побудові мають форму ромбів, де C p 5 10 15 20 сигнальна точка, i , j , k , p , - номери сигнальних точок, кожні вісімнадцять сигнальних точок об'єднують у кластери у формі зовнішнього обвідного і внутрішнього шестикутників. Вимірюють відстані між сенсорами, реконструюють топологічну поверхню сенсорної мережі, обчислюють віртуальні позиції кожного сенсора, аналізують візуалізовану форму реконструйованої топологічної позиції кожного сенсора з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками, які представляють сенсори, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси ij [4C]k , які при p побудові мають форму ромбів, де C - сигнальна точка, i , j , k , p , - номери сигнальних точок, кожні 18 сигнальні точки об'єднують у кластери у формі зовнішнього обвідного і внутрішнього шестикутників (див фіг. 1). При цьому (див фіг. 2) сигнальні точки 1, 2, 3, 4, 5, 6 є вершинами внутрішнього шестикутника і мають по п'ять функціональних зв'язків, сигнальні точки 7, 8, 9, 10, 11, 12, є вершинами зовнішнього обвідного шестикутника і мають по три функціональні зв'язки, сигнальні точки 13, 14, 15, 16, 17, 18 є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки. Як основу для відслідковування рівня пошкодження сигналу окремого сенсора використовують властивість симплекса при переміщенні сигнальних точок - вершин симплекса трансформуватися у одновимірні, двовимірні, тривимірні геометричні об'єкти. При цьому, щоб об'єм трансформованого симплекса не дорівнював нулю, атакована сигнальна точка повинна знаходитися на кінці малої осі ромба. При здійсненні атаки на сигнальну точку, що знаходиться у вершині зовнішнього обвідного шестикутника (див. фіг. 3) 7 трансформації зазнає чотириточковий симплекс 13 [ 4C]14 , в якому атакована сигнальна точка 1 знаходиться на кінці малої осі ромба, а схема візуалізації атаки показана на фіг. 6. При здійсненні атаки на сигнальну точку, що знаходиться у середині сторони зовнішнього обвідного 25 7 шестикутника (див. фіг. 4) трансформації зазнають чотириточкові симплекси 1 [ 4C]14 , і 14 [ 4C]8 , 2 1 2 в яких атакована сигнальна точка знаходиться на кінцях малих осей ромбів, а схема візуалізації атаки показана на фіг. 7. При здійсненні атаки на сигнальну точку, що знаходиться у вершині внутрішнього шестикутника (див. фіг. 5) трансформації зазнають чотириточкові симплекси 7 і 1 [ 4C]14 , в яких атакована сигнальна точка знаходиться на кінцях малих осей ромбів, а 2 схема візуалізації атаки показана на фіг. 8. Приведений аналіз показує, що запропонована кластерна модель дозволяє візуалізувати атаку на кожну сигнальну точку, що знаходиться у структурі кластера. Приклад конкретної реалізації способу кластерного моделювання бездротової сенсорної мережі Бездротову сенсорну мережу побудували на сенсорах, які сформували на модулях ХВее виробництва фірми США Digi International шляхом програмування стеку ХВее на програмному рівні. Сенсори функціонували в рамках протоколу Zig ХВее згідно зі стандартом IEEE 802.15.4. Бездротову сенсорну мережу сформували на 198 сенсорах з інтегрованими антенами та розмістили у просторі на відстані 1 м між сусідніми сенсорами таким чином, що кожен сенсор знаходився у вершині рівностороннього трикутника. Кожні два сусідні рівносторонні трикутники 13 7 6 [ 4C]1 30 35 40 45 50 55 об'єднали у чотириточкові симплекси ij [4C]k , які при побудові мають форму ромбів, де C p сигнальна точка, i , j , k , p , - номери сигнальних точок, кожні 18 сигнальні точки об'єднують у кластери (див фіг. 1) у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що сигнальні точки 1, 2, 3, 4, 5, 6 (див фіг. 2) є вершинами внутрішнього шестикутника і мають по п'ять функціональних зв'язків, сигнальні точки 7, 8, 9, 10, 11, 12 є вершинами зовнішнього обвідного шестикутника і мають по три функціональні зв'язки, сигнальні точки 13, 14, 15, 16, 17, 18 є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки. Бездротову сенсорну мережу вводили в два режими роботи: без приглушення сигналів окремих сенсорів при температурі довкілля в межах від +5 °C до +30 °C і вологості від 30 % до 70 %. Вирівнювали відстані між сенсорами на підставі рівня потужності прийнятого сигналу. При цьому потужність прийнятого сигналу вимірювали за допомогою програми на підставі 10-бітного аналогово-цифрового перетворювача. В подальшому здійснювали реконструювання топологічної поверхні сенсорної мережі, обчислювали віртуальні позиції кожної сигнальної точки використовуючи сітку шестикутних кластерів з довжиною функціонального зв'язку 1 м і визначали, що об'єм симплексів рівний нулю. 2 UA 93269 U Потім приглушували сигнал сигнальної точки 7 (див. фіг. 3) і шляхом вимірювання потужності прийнятого сигналу сигнальними точками 13, 1, 14 визначали величину трансформації сигнальної точки 7 (див. фіг. 6). Так за потужністю прийнятого сигналу 5 7 визначили, що відстань між сигнальними точками симплекса 13 [ 4C]14 збільшилась до 2,85 м, а 1 3 об'єм трансформованого симплекса становив 0,38 м . Аналогічно приглушили сигнал сигнальної точки 14 (див. фіг. 4) і шляхом вимірювання потужності прийнятого сигналу сигнальними точками 7, 1, 2, 8 визначали величину трансформації сигнальної точки 14 (див. фіг. 7). Так за потужністю прийнятого сигналу визначили, що відстань між сигнальними точками 10 7 симплексів 1 [4C]11 і 14 [ 4C]8 збільшилась до 2,85 м, а об'єм трансформованих симплексів 1 2 2 3 станови 0,57 м . Аналогічно приглушили сигнал сигнальної точки 1 (див. фіг. 5) і шляхом вимірювання потужності прийнятого сигналу сигнальними точками 2, 14, 7, 13, 6 визначали величину трансформації сигнальної точки 1 (див. фіг. 8). Так за потужністю прийнятого сигналу 15 7 2 визначили, що відстань між сигнальними точками симплексів 13 [ 4C]1 і 1 [ 4C]14 збільшилась до 6 7 3 2,85 м, а об'єм трансформованих симплексів становив 0,76 м . Таким чином запропонований спосіб дозволяє спростити контроль за бездротовою сенсорною мережею, що налічує 18 і більше сенсорів і дає можливість відслідковувати трансформацію симплексів, сенсори яких утворюють кластер у формі зовнішнього обвідного і внутрішнього шестикутників. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Спосіб кластерного моделювання бездротової сенсорної мережі, що полягає у вимірюванні відстані між сенсорами, реконструюванні топологічної поверхні сенсорної мережі, обчисленні віртуальної позиції кожного сенсора, аналізі візуалізованої форми реконструйованої топологічної позиції кожного сенсора з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками, які представляють сенсори, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси ij [4C]k , які при побудові p мають форму ромбів, де C - сигнальна точка, i , j , k , p , - номери сигнальних точок, та виявленні атакованих сенсорів, який відрізняється тим, що кожні вісімнадцять сигнальних точок об'єднують у кластер у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що шість сигнальних точок є вершинами внутрішнього шестикутника і мають п'ять функціональних зв'язків, інші шість сигнальних точок є вершинами зовнішнього обвідного шестикутника і мають три функціональні зв'язки, останні шість сигнальних точок є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки. 3 UA 93269 U 4 UA 93269 U 5 UA 93269 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул.Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюChyzh VitaliI MykhaIlovych, Mikolaj Karpinski syn Piotra, Balaban Stepan Mykolaiovych
Автори російськоюЧиж Виталий Михайлович, Миколай Карпиньски сын Пйотра, Балабан Степан Николаевич
МПК / Мітки
МПК: H04W 12/12
Мітки: спосіб, бездротової, сенсорної, мережі, моделювання, кластерного
Код посилання
<a href="https://ua.patents.su/8-93269-sposib-klasternogo-modelyuvannya-bezdrotovo-sensorno-merezhi.html" target="_blank" rel="follow" title="База патентів України">Спосіб кластерного моделювання бездротової сенсорної мережі</a>
Спосіб симплексного моделювання бездротової сенсорної мережі
Номер патенту: 82896
Опубліковано: 27.08.2013
Автори: Карпіньскі Міколай син Пйотра, Чиж Віталій Михайлович, Демчишин Омелян Іванович, Балабан Степан Миколайович
МПК: H04W 12/12
Мітки: спосіб, сенсорної, моделювання, бездротової, мережі, симплексного
Формула / Реферат:
Спосіб симплексного моделювання бездротової сенсорної мережі, що полягає у вимірюванні відстані між сенсорами з використанням моделювання похибки вимірювання відстані між сенсорами змішаним шумом, реконструюванні топологічної поверхні сенсорної мережі з використанням тріангуляції Делоне, обчисленні віртуальної позиції кожного сенсора, аналізі візуалізованої форми реконструйованої топологічної позиції кожного сенсора з використанням сітки...
Спосіб аудиту захищеної бездротової мережі
Номер патенту: 82019
Опубліковано: 10.07.2013
Автор: Галущенко Олександр Михайлович
МПК: H04W 28/00
Мітки: захищеної, мережі, аудиту, бездротової, спосіб
Формула / Реферат:
1. Спосіб аудиту захищеної бездротової мережі, що має принаймні одну захищену бездротову точку доступу та принаймні один контролюючий пристрій, який відрізняється тим, що для підключення на контролюючому пристрої створюють принаймні один емульований клієнт, який під'єднують до захищеної бездротової точки доступу, використовуючи один набір характеристик: МАС-адресу, рівень потужності сигналу, час запиту, діапазон таймінгів, у разі, якщо...
Спосіб виготовлення наносхем бездротової мережі на кристалі
Номер патенту: 60938
Опубліковано: 25.06.2011
Автори: Слюсар Вадим Іванович, Слюсар Дарья Вадимівна
МПК: H01Q 1/38
Мітки: бездротової, наносхем, кристали, виготовлення, мережі, спосіб
Формула / Реферат:
1. Спосіб виготовлення наносхем бездротової мережі на кристалі, що полягає у багатошаровому нанесенні топології наносхеми на підкладку кристала та розташуванні по гранях наносхеми множини наноантен, які утворюють двовимірні антенні решітки для бездротової передачі даних у мережі кристала, який відрізняється тим, що формування багатошарової топології наносхеми виконують над поверхнею кристала шляхом створення пірамідальної конструкції...
Спосіб та пристрій для синхронізації бездротової мережі
Номер патенту: 98533
Опубліковано: 25.05.2012
Автори: Хорн Гейвін Б., Сяо Лей, Кхандекар Аамод Д., Паланкі Раві, Агаше Параг А.
МПК: H04J 3/06
Мітки: пристрій, мережі, синхронізації, спосіб, бездротової
Формула / Реферат:
1. Спосіб синхронізації бездротових вузлів в мережі бездротового зв'язку, що включає етапи, на яких:приймають по транзитній лінії зв'язку показник якості, що стосується бездротового вузла;вибирають згаданий бездротовий вузол для синхронізації, з одного або більше відмінних бездротових вузлів, щонайменше частково, на основі згаданого показника якості; ісинхронізують хронування із згаданим бездротовим вузлом.2....
Система та спосіб визначення місцеположення фемтостільників при пасивному сприянні з макростільникової бездротової мережі
Номер патенту: 99153
Опубліковано: 25.07.2012
Автор: Годжик Александар М.
МПК: H04W 16/16, H04W 48/00, H04W 4/02
Мітки: пасивному, система, спосіб, мережі, місцеположення, фемtoстільників, сприянні, бездротової, макростільникової, визначення
Формула / Реферат:
1. Спосіб визначення місцеположення, призначений для користувацького обладнання (UE), причому спосіб включає етапи, на яких:визначають, за допомогою UE, чи знаходиться UE в стані низької рухливості, причому ступінь рухливості може бути оцінений шляхом оцінювання сукупних фазових відхилень пілот-сигналу за період часу;виконують настроювання на частоту, на якій розгорнені фемтостільники;виконують вибірку...
Попередній патент: Спосіб видалення йоду із мінералізованих пластових вод
Наступний патент: Спосіб формування епітаксійних шарів кремнію
Випадковий патент: Спосіб зневоднення смоли кам'яновугільної