Коливальний віскозиметр
Номер патенту: 45220
Опубліковано: 15.03.2002
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
Формула / Реферат
1. Коливальний віскозиметр, який містить корпус, контур збудження коливань, що містить спарений електромагніт, який відрізняється тим, що він додатково оснащений підсилювачем збудження низької частоти, блоком керування, електромагнітами блока керування, фазоінвертором, другим контуром збудження коливань, частотно-вибірковою ланкою, яка містить два двоконсольних вала з жорстко закріпленим на торці однієї з його консолей конусом, пружинами, вузлами настроювання жорсткості динамічної системи, індукційними датчиками, постійними магнітами, джерелом живлення, частотоміром і реєстратором контрольованих параметрів, при цьому усередині корпуса розміщено дві перегородки, в кожній з зазначених перегородок встановлено підшипники ковзання, на стінці корпуса між перегородками виконано отвір, який закривається кришкою, в кожний контур збудження коливань введена додаткова пара електромагнітів, частотно-коливальна ланка зв'язана з контуром збудження коливань через силопередавальні феромагнітні пластини, жорстко і симетрично закріплені на другій консолі вала у площині його осі, вал виконано таким, що проходить крізь підшипники ковзання, усередині електромагнітів блока керування встановлено пружини, кожна з яких контактує з торцевою стінкою корпуса і з торцевою частиною двоконсольного вала, блок керування виконано зв'язаним з електромагнітами блока керування, виходи індукційних датчиків виконано сполученими з електромагнітами послідовно через підсилювач збудження низької частоти і фазоінвертор, а виходи джерела живлення виконано сполученими з електромагнітами блока керування через зазначений блок керування, частотоміром і реєстратором контрольованих параметрів.
2. Коливальний віскозиметр за п. 1, який відрізняється тим, що до вільного кінця одного вала конус закріплений за вершину, а на другому валу конус закріплений до консолі зазначеного вала у своїй порожнині.
3. Коливальний віскозиметр за п. 1, який відрізняється тим, що конуси виконано такими, що входять один в один.
4. Коливальний віскозиметр за п. 1, який відрізняється тим, що конуси виконано контактуючими між собою відповідно внутрішньою та зовнішньою поверхнями.
5. Коливальний віскозиметр за п. 1, який відрізняється тим, що порожнина між перегородками корпуса виконана герметичною.
Текст
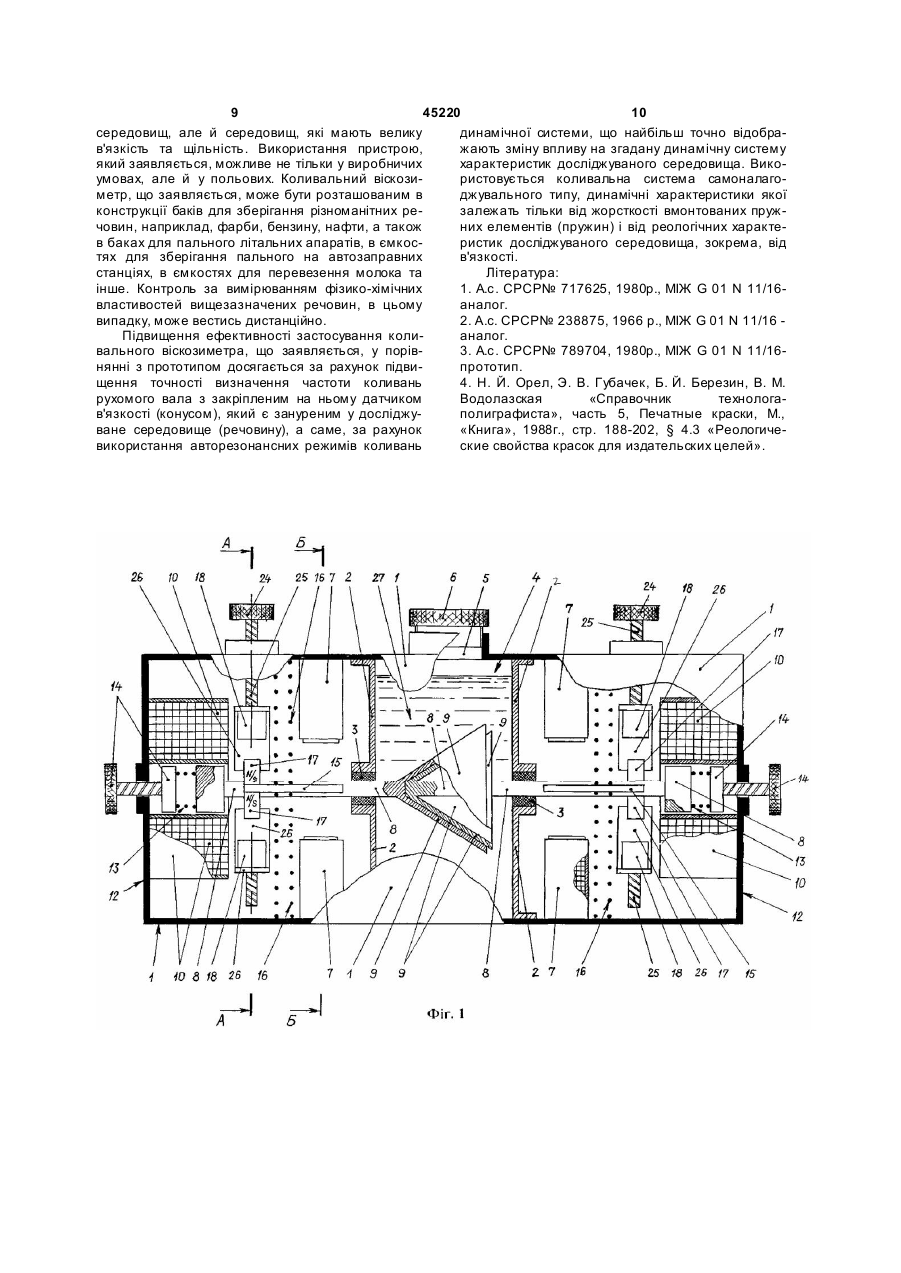
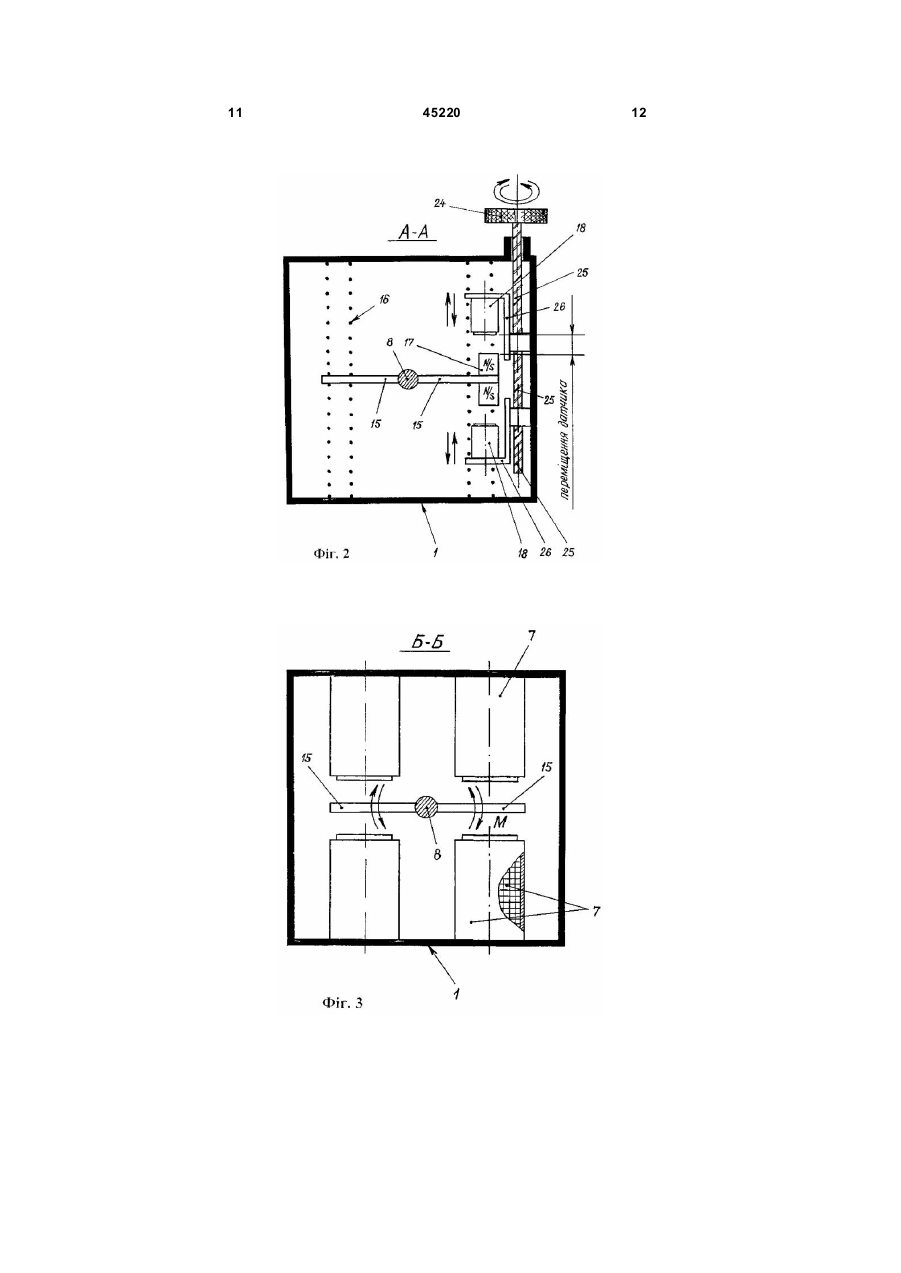
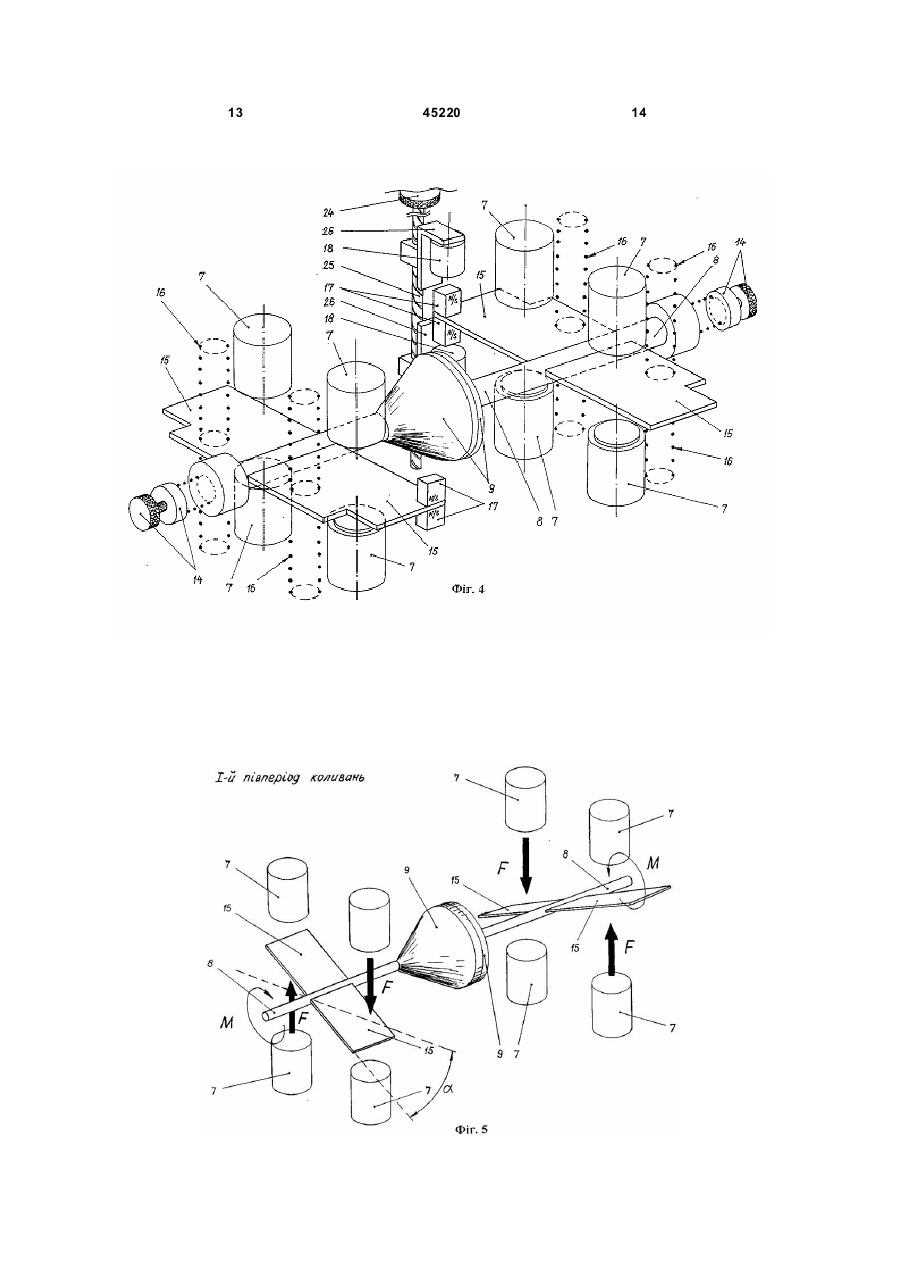
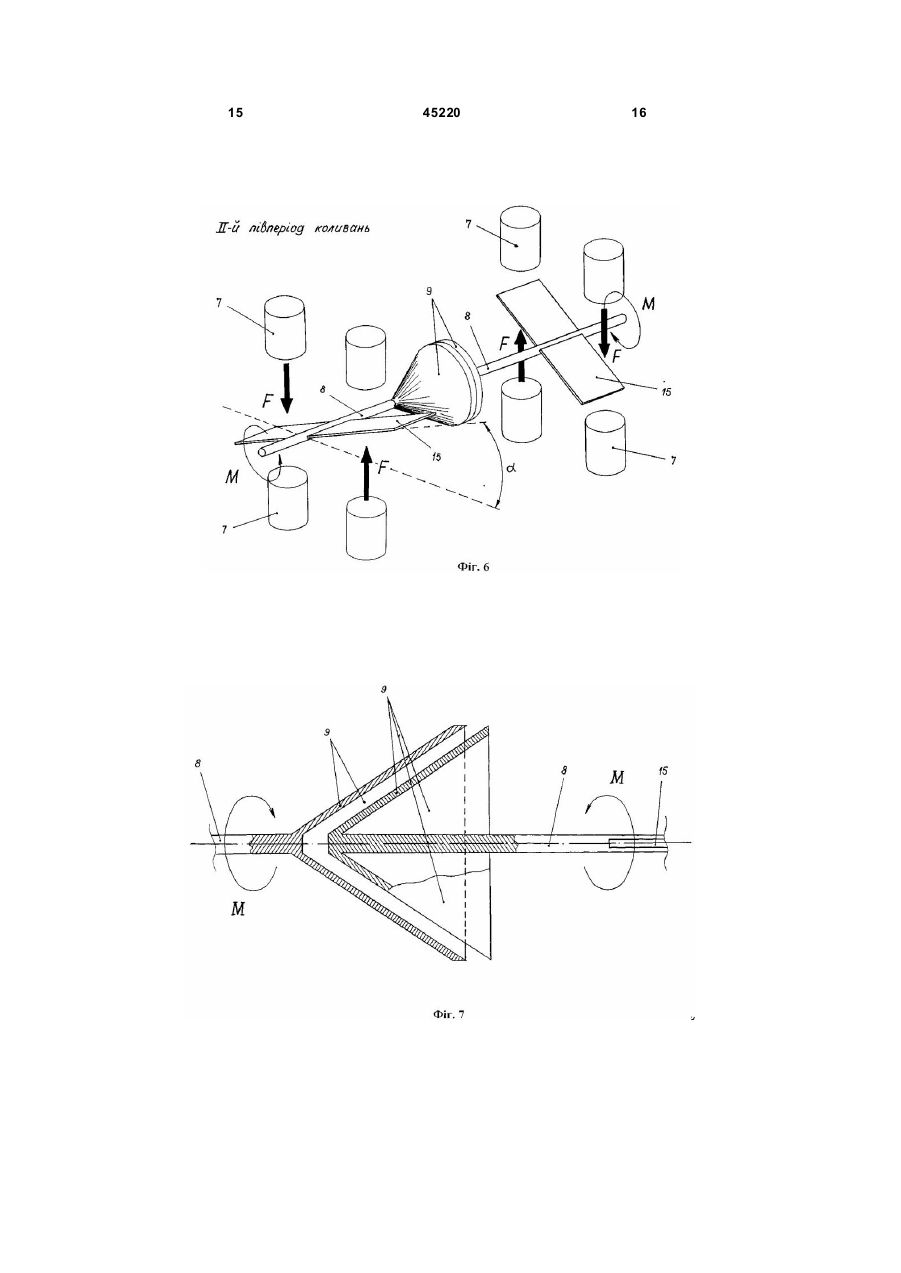
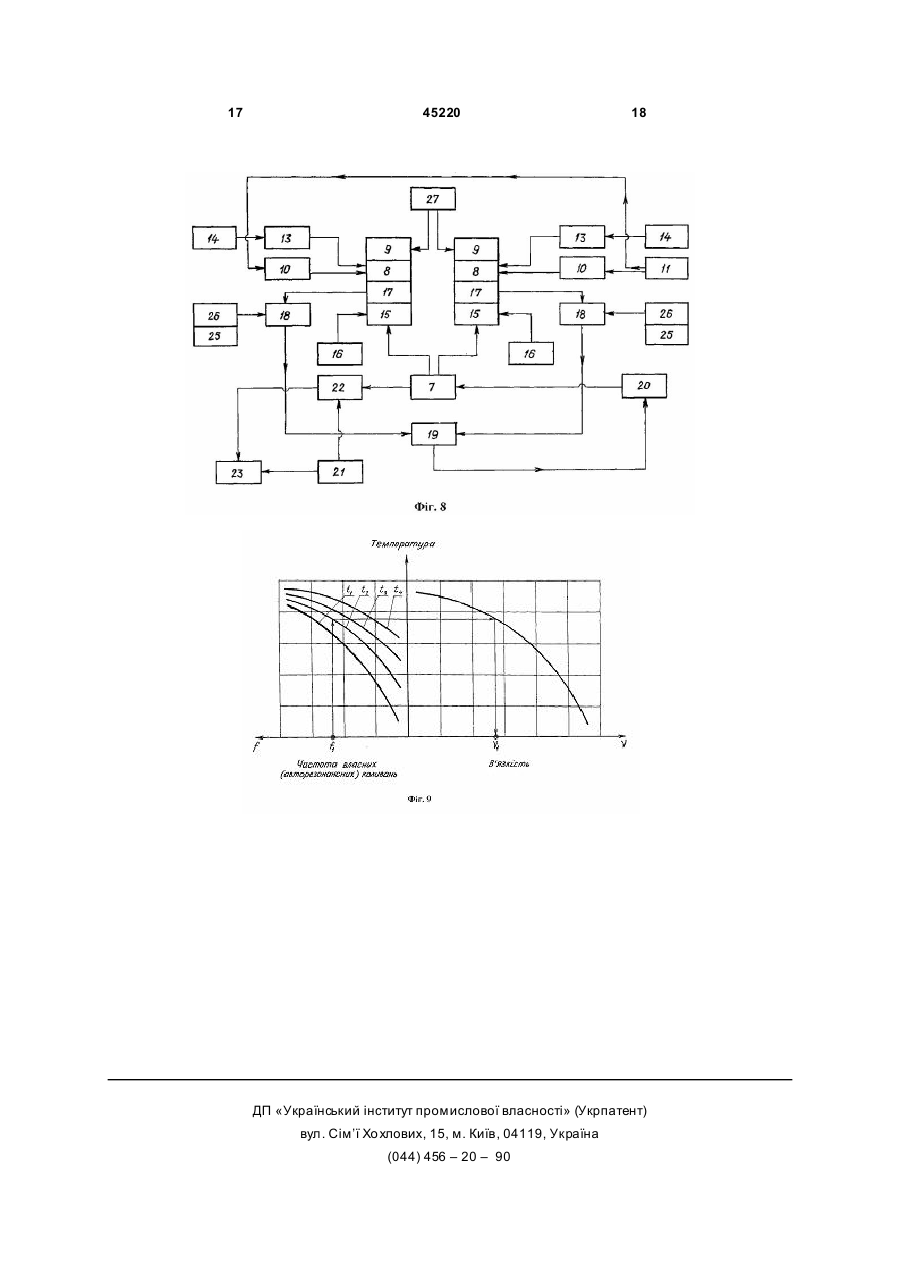
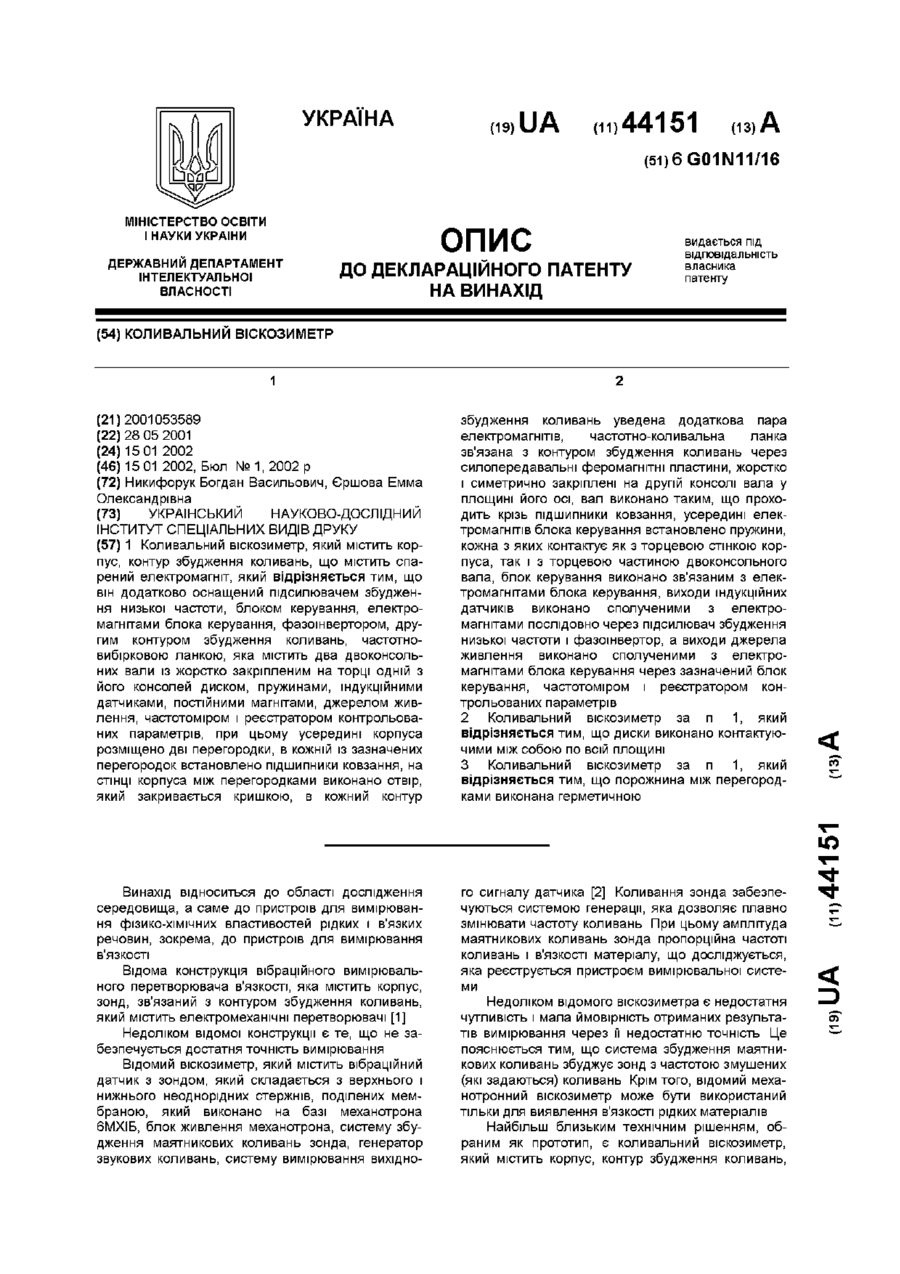
1. Коливальний віскозиметр, який містить корпус, контур збудження коливань, що містить спарений електромагніт, який відрізняється тим, що він додатково оснащений підсилювачем збудження низької частоти, блоком керування, електромагнітами блока керування, фазоінвертором, другим контуром збудження коливань, частотновибірковою ланкою, яка містить два двоконсольних вала з жорстко закріпленим на торці однієї з його консолей конусом, пружинами, вузлами настроювання жорсткості динамічної системи, індукційними датчиками, постійними магнітами, джерелом живлення, частотоміром і реєстратором контрольованих параметрів, при цьому усередині корпуса розміщено дві перегородки, в кожній з зазначених перегородок встановлено підшипники ковзання, на стінці корпуса між перегородками виконано отвір, який закривається кришкою, в кожний контур збудження коливань введена додаткова пара електромагнітів, частотно-коливальна ланка зв'язана з контуром збудження коливань через силопередавальні феромагнітні пластини, A 2 45220 1 3 45220 4 чутливість і мала ймовірність отриманих результапорожнина між перегородками корпуса виконана тів контролю через недостатню точність вимірюгерметичною. вання. Це пояснюється тим, що система збудженПорівняльний аналіз з прототипом показує, що ня маятникових коливань збуджує зонд з частотою коливальний віскозиметр, що заявляється, відріззмушених (які задаються) коливань. Крім того, віняється тим, що він додатково оснащений підсидомий механотронний віскозиметр може бути вилювачем збудження низької частоти, блоком керукористаний тільки для виявлення в'язкості рідких вання, електромагнітами блока керування, матеріалів. фазоінвертором, другим контуром збудження коНайбільш близьким технічним рішенням, обливань, частотно-вибірковою ланкою, яка містить раним як прототип, є коливальний віскозиметр, два двоконсольних вала з жорстко закріпленим на який містить корпус, контур збудження коливань, торці одній з його консолей конусом, пружинами, що містить спарений електромагніт [З]. вузлами настроювання жорсткості динамічної сисНедоліком коливального віскозиметра, обратеми, індукційними датчиками, постійними магніним як прототип, є недостатня точність вимірютами, джерелом живлення, частотоміром і реєствання і, як наслідок, погіршення у визначенні вератором контрольованих параметрів, усередині личини в'язкості досліджуваного середовища корпуса розміщено дві перегородки, в кожній з (матеріалу). зазначених перегородок встановлено підшипники В основу винаходу поставлена задача шляхом ковзання, на стінці корпуса між перегородками усунення недоліків прототипу забезпечити підвивиконано отвір, який закривається кришкою, в кощення точності вимірювання величини в'язкості жний контур збудження коливань введена додатдосліджуваного середовища. кова пара електромагнітів, частотно-коливальна Суть винаходу в коливальному віскозиметрі, ланка зв'язана з контуром збудження коливань який містить корпус, контур збудження коливань, через силопередавальні феромагнітні пластини, що містить спарений електромагніт, досягається жорстко і симетрично закріплені на другій консолі тим, що він додатково оснащений підсилювачем вала у площині його осі, вал виконано таким, що збудження низької частоти, блоком керування, проходить крізь підшипники ковзання, усередині електромагнітами блока керування, фазоінвертоелектромагнітів блока керування встановлено ром, другим контуром збудження коливань, частопружини, які контактують кожна як з торцевою стітно-вибірковою ланкою, яка містить два двохконнкою корпуса, так і з торцевою частиною двохконсольних вала з жорстко закріпленим на торці одній сольного вала, блок керування виконано зв'язаним з його консолей конусом, пружинами, вузлами наз електромагнітами блока керування, виходи індустроювання жорсткості динамічної системи, індуккційних датчиків виконано сполученими з електроційними датчиками, постійними магнітами, джеремагнітами послідовно через підсилювач збудження лом живлення, частотоміром і реєстратором низької частоти і фазоінвертор, виходи джерела контрольованих параметрів. Суть винаходу досяживлення виконано сполученими з електрогається також й тим, що у середині корпуса розмімагнітами блока керування через зазначений блок щено дві перегородки, в кожній з зазначених перекерування, частотоміром і реєстратором контрогородок встановлено підшипники ковзання, на льованих параметрів, при цьому до вільного кінця стінці корпуса між перегородками виконано отвір, одного вала конус є закріпленим за вершину, а на який закривається кришкою, в кожний контур збудругому валу конус є закріпленим до консолі задження коливань введена додаткова пара електзначеного вала у своїй порожнині, конуси виконаромагнітів, частотно-коливальна ланка зв'язана з но такими, що входять один у од-ний, зазначені контуром збудження коливань через силопередаконуси виконано контактуючими між собою відповальні феромагнітні пластини, жорстко і симетривідно внутрішньою та зовнішньою поверхнями, а чно закріплені на другій консолі вала у площині порожнина між перегородками корпуса виконана його осі, вал виконано таким, що проходить крізь герметичною. підшипники ковзання, усередині електромагнітів Таким чином, коливальний віскозиметр, що блока керування встановлено пружини, кожна з заявляється, відповідає критерію винаходу "новияких контактує з торцевою стінкою корпуса і з торзна". цевою частиною двоконсольного вала, блок керуСуть винаходу пояснюється кресленнями, де вання виконано зв'язаним з електромагнітами блона фіг.1 подана конструктивно-компонувальна ка керування, виходи індукційних датчиків схема коливального віскозиметра з розтинами для виконано сполученими з електромагнітами посліпояснення конструкції, на фіг.2 подана схема кодовно через підсилювач збудження низької частоливального віскозиметра у розтину А - А, на фіг.3 ти і фазоінвертор, а виходи джерела живлення подана схема коливального віскозиметра у розтивиконано сполученими з електромагнітами блока ну Б - Б, на фіг.4 подана розміщення обладнання керування через зазначений блок керування, часусередині корпуса, на фіг.5 - 6 подані схеми збутотоміром і реєстратором контрольованих парадження крутильних коливань обох валів з конусаметрів. Суттю винаходу є й те, що до вільного кінми, відповідно, у перший та другий півперіоди коця одного вала конус е закріпленим за вершину, а ливань, на фіг. 7 подана схема розміщення конусів на другому валу конус є закріпленим до консолі між собою, на фіг.8 представлена блок-схема козазначеного вала у своїй порожнині, конуси виколивального віскозиметра, яка пояснює його робонано такими, що входять один в одне, зазначені ту, на фіг.9 показано номограму залежності частоконуси виконано контактуючими між собою відпоти авторезонансних коливань f від в'язкості ν відно внутрішньою та зовнішньою поверхнями, а дослідного матеріалу та температури t оточуючого середовища. 5 45220 6 Коливальний віскозиметр (див. фіг.1) містить реєстратора 23 контрольованих параметрів. На корпус 1, у середині якого розміщено дві перегокорпусі 1 встановлено вузол 24 настроювання диродки 2. В кожній з зазначених перегородок 2 намічної системи частотно-вибіркової ланки, який встановлено підшипники ковзання 3. Отвори підрегулює положення індукційних датчиків 18 відношипників ковзання 3 розміщено осесиметрично сно жорстко закріплених на феромагнітній пластиодин до одного. Порожнина 4 між перегородками 2 ні 15 постійних магнітів 17 (N/S). Частотнопредставляє собою ємкість для досліджуваного вибіркова ланка зв'язана з контуром збудження середовища і виконана герметичною. На верхній коливань через силопередавальні феромагнітні стінці корпуса 1 (між двома зазначеними перегопластини 15. Вузол 24 настроювання динамічної родками 2) виконаний отвір 5, який закривається системи частотно-вибіркової ланки (як варіант кришкою 6. Крізь отвір 5 у зазначену ємкість заликонструктивного виконання) містить регулювальвається досліджуване середовище. У середині ний гвинт 25, який виконано механічно зв'язаним з корпуса 1 розміщено контур збудження коливань, пристосуванням 26. На зазначеному пристосуванні що містить спарений електромагніт 7 (електровіб26 жорстко закріплений індукційний датчик 18. ратор), і частотно-вибіркову ланку, яка містить два Коливальний віскозиметр працює наступним двох-консольних вала 8 з жорстко закріпленим на чином. торці одній з його консолей конусом 9. КонструктиПо-перше в ємкість (поз. 4) між перегородками вно до вільного кінця одного вала 8 конус 9 є за2 заливається досліджуване середовище (позиція кріпленим за вершину, а на другому валу 8 конус 9 27). Для цього відкриваються кришка 6 отвору 5 на є закріпленим до консолі зазначеного вала 8 у корпусі 1 і ємність 4 заповнюється на величину, своїй порожнині (див. фіг.7). Конуси 9 конструктивщоб конуси 9 були зануреними у досліджуване но розміщено так, що вони входять один у другий, середовище 27 повністю. Після наповнення ємкоспри цьому конуси 9 виконано контактуючими між ті 4 досліджуваним середовищем 27 отвір 5 гермесобою відповідно внутрішньою та зовнішньою потично закривається кришкою 6. При підключенні верхнями (див. фіг.1 та фіг.7), які конструктивно джерела живлення 21 до блока керування 11 привиконують полірованими. Електромагніти 7 розмістрій (коливальний віскозиметр) готовий до перщено попарно один до одного в блоках з зазором шого етапу роботи. між собою, симетрично і попарно співвісно. КожПерший етап роботи починається тим, що з ний з двох-консольних валів 8 виконано встановблока керування 11 подається сигнал (електричленим у отвір підшипника ковзання 3, при цьому ний струм) на електромагніти 10. Спрацьовують вал 8 першої частотно-коливальної ланки розміелектромагніти 10, які починають виробляти елекщено по відношенню до валу 8 другої частотнотромагнітне поле. Під дією зазначеного електровибіркової ланки так, що їх осі співпадають. Вільмагнітного поля вал 8 (кожної з частотноний кінець кожного з валів 8 виконано таким, що коливальної ланки) буде втягуватися всередину входить у о твір електромагніта 10 блока керування порожнини (позиція 28, див. фіг.1) електромагніта 11. Електромагніт 10 блока керування 11 жорстко 10, стискаючи пружину 13. Конуси 9 кожної частотзакріплено на торцевій стінці 12 корпуса 1, при но-вибіркової ланки відходять один від одного, при цьому отвори в електромагнітах 10 і підшипників цьому простір між ними заповнюється досліджуваковзання З розміщено осесиметрично один до одним середовищем 27. У такому стані конуси 9 виного. У внутрішній порожнині отвору електромагнітримуються протягом не менше 10...20 секунд та 10 встановлено пружину 13, яка контактує од(для заповнення простору між конусами 9 досліним своїм кінцем з елементами регулювання 14 джуваним середовищем 27). Після зазначеного жорсткості динамічної системи, які є розміщеними часу з блока керування 11 на електромагніти 10 на торцевій стінці 12 корпуса 1, а другим кінцем - з подається інший сигнал, при якому котушки електторцевою частиною двохконсольного вала 8. На ромагнітів 10 обезструмляться. Під дією сил розвільному кінці вала 8 жорстко і симетрично закріптискування пружин 13 вали 8 почнуть переміщувалені силопередавальні феромагнітні пластини 15, тись назустріч один до одного (переміщуючись в при цьому зазначені пластини 15 закріплено у підшипниках ковзання З, які закріплені на перегоплощині осі вала 8. Пластини 15 виконано розтародках 2 корпуса 1, до контактування поверхнями шованими в одній площині, що проходить крізь конусів 9 між собою (відповідно зовнішньою та вісь валу 8 (див. фіг.4). У пластини 15 упираються внутрішньою). При цьому в зазорі між конусами 9 пружини 16, а на пластинах 15 закріплені постійні буде знаходитись досліджуване середовище 27. магніти 17 (N/S), при цьому пружини 16 упираютьПри вимиканні джерела живлення 21 від блока ся одним кінцем у пластини 15, а другим - у стінку керування 11 та підключенні джерела живлення 21 корпуса 1, наприклад, у вер хню (як варіант консдо підсилювача збудження низької частоти 19 і труктивного виконання). Зазначені магніти 17 (N/S) частотоміра 22, пристрій (коливальний віскозирозміщено в зазорі між індукційними датчиками 18 метр) готовий до другого етапу роботи - безпосе(див. фіг.2 та фіг.4). Електромагніти 10 блока кереднього вимірювання в'язкості V досліджуваного рування 11 виконано зв'язаними з зазначеним середовища 27. блоком керування 11. Виходи індукційних датчиків При цьому в Індукційному датчику 18, який 18 виконано сполученими з електромагнітами 7 знаходиться в магнітному полі (N/S) постійного послідовно через підсилювач збудження низької магніту 17, відпрацьовується сигнал у вигляді елечастоти 19 і фазоінвертор 20, а виходи джерела ктрорушійної сили (е. р. с.) Індукції. При цьому інживлення 21 виконано сполученими з електродукційні датчики 18 І постійні магніти 17 встановмагнітами 10 блока керування 11 через зазначелені так, що е. р. с. відпрацьовується тільки в ний блок керування 11, з входами частотоміра 22 і одному з датчиків 18 кожного з контурів збудження 7 45220 8 коливань. Сигнал з цього датчика 18 (кожного контильних коливань більше. І навпаки, у середовищі туру збудження коливань) подається на підсилю27 більшої щільності, сили щеплення середовища вач збудження 19, де робиться його підсилювання, 27 і конусів 9 між собою можуть бути настільки і далі, через фазоінвертор 20, на діагональнозначними, що при певній (початковій) жорсткості протилежні магніти 7 (див. фіг.5) блоків електровідинамічної системи, зусиль від електромагнітів 7 браторів. Електромагніти 7 (до яких підведений не вистачить, щоб їх подолати. В цьому випадку, підсилений сигнал) починають діяти на силопереза допомогою регулювального гвинта 25 вузла 24 давальну феромагнітну пластину 15 парою сил F настроювання динамічної системи, індукційний відносно осі оберту вала 8. При цьому вал 8 буде датчик 18, жорстко закріплений на пристосуванні провертатися у підшипниках ковзання 3 у напрям26, переміщується у бік постійного магніту 17. ку моменту М, створеного парою сил F від електЗменшення зазору між індукційним датчиком 18 і ромагнітів 7 (див. фіг.5). При цьому моменти Μ у постійним магнітом 17 приводить до того, що збіперший півперіод коливань вала 8 з конусом 9 льшується величина сигналу, що виробляється будуть направлені в протилежні боки. Діагональне індукційним датчиком 18, у вигляді е. р. с. індукції, протилежні (відносно працюючих електромагнітів і, як наслідок, збільшується потужність сигналу, 7) пружини 15 (див. фіг.4) почнуть стискуватися, який надходить від підсилювача збудження 19 на накопичуючи енергію. При досягненні положення електромагніти 7. Водночас, шляхом стиснення за рівноваги, при якому сила F від електромагнітів 7 допомогою елементів 14 пружин 13 електромагнібуде дорівнювати силі затягнення пружини 16, тів 10, добиваються деякого збільшення частоти сигнал на працюючому індукційному датчику 18 обертання вала 8, і, як наслідок, зменшення ампбуде дорівнювати "нулю", а тому і "н улю" на елеклітуди коливань (кута повороту α - див. фіг.5 і тромагнітах 7. Не отримуючи протидії з боку елекфіг.6) зазначеного вала 8. Зменшення кута повотромагнітів 7 (задіяних у перший півперіод період роту α вала 8 з конусом 9 буде сприяти зменшенколивань - див. фіг.5), пружини 13 почнуть розжиню сили тертя між середовищем 27 і конусом 9 та матися, намагаючись вернутися у положення рівпідвищить чутливість частотно-вибіркової ланки. новаги. Вал 8 з конусом 9 почне провертатися у При виконанні контрольного заміру параметрів зворотній бік. У другий період коливань до роботи в'язкості досліджуваного середовища 27, у якості вступає другий індукційний датчик 18 (конструктиякого може бути, наприклад, фарба, нафта, бенвно розташований симетрично відносно осі валу 8 зин, керосин, спирт та інші речовини, заміряють другий індукційний датчик 18 показаний на фіг.3 та частоту f авторезонансних (власних) коливань фіг.4 ), сигнал з якого, після підсилення у підсилючастотно-вибіркової ланки. Тертя між собою конувачі збудження 19, буде надходити на два інших сів 9 та досліджуваного матеріалу 27 призведе до діагонально протилежних електромагніта 7 (елеквиникнення дисипативних сил тертя і, як наслідок, тровібратора), які впливають парою сил F (другого до зменшення частоти f авторезонансних колизнаку) на силопередавальну феромагнітну пласвань системи "вал 8 з конусом 9 - досліджуване тину 15, при цьому вони будуть надавати їй безкосередовище 27". Знаючи виміряні раніш еталонні нтактне додатковий рух у зворотній бік від першого частоти коливань f частотно-вибіркової ланки в півперіоду коливань (з моментом Μ іншого, відноємності 4 з досліджуваним матеріалом 27, парасно першого півперіоду коливань, знака) (див. метри якого перевірені Іншими методами контрофіг.6). лю, наприклад, що надані в [3]), і порівнюючи їх з Таким чином, виникають механічні коливання показниками частотоміра 22 при контрольному системи "вал 8 - конус 9 - пружини 13", що не затувимірюванні, отримують за номограмою залежносхають, і сінфазні з ними електричні коливання в ті частоти f власних (авторезонансних) коливань системі "датчик 18 - підсилювач збудження 19 системи "вал з конусом-досліджуваний матеріал" електромагніти 7", частота яких в точності доріввід в'язкості ν досліджуваного матеріалу 27 та тенює частоті власних коливань системи "вал 8 з мператури t оточуючого середовища, величину конусом 9 - досліджуване середовище 27". Вимів'язкості ν дослідного середовища 27 (див. номорювання частоти f власних коливань вала 8 з кограму на фіг.9). Наприклад, при контрольному винусом 9 здійснюється за допомогою електронномірюванні в'язкості ν досліджуваного середовища рахувального частотоміра 22. Для автоматичного 27 (матеріалу) була отримана частота f1 власних визначення величини фактичної в'язкості ν досліавторезонансних коливань. Згідно з номограмою, джуваного середовища 27 сигнал з електроннона осі f знаходять величину f1, проводять перпенрахувального частотоміра 22 подається на вхід дикуляр до графіків t (на фіг.9 - зазначено t1, t2, t3 реєстратора 23 контрольованих параметрів, який та t4), відповідно до температури t2 (як приклад), переводить електричні величини у розмірність переходять паралельно базової осі до графіка в'язкості. зміни в'язкості ν, і опускаючи перпендикуляр з точФізична суть процесу визначення в'язкості доки перетину графіка зміни в'язкості ν на вісь ν, сліджуваного середовища полягає в наступному. отримують величину фактичної в'язкості ν1 досліЗалежно від в'язкості ν досліджуваного середжуваного матеріалу (поз. 27). довища 27, тертя між конусами 9 кожної частотноВикористання в якості показника в'язкості довибіркової ланки, які є зануреними у досліджуване сліджуваної речовини частоти власних (авторезосередовище 27 і зазначеним середовищем 27 (що нансних) коливань зонда (який виконано у вигляді заходиться між зазначеними конусами 9), буде вала з диском), дозволить підвищити точність у різним. Наскільки середовище 27 буде близьким визначенні в'язкості досліджуваного середовища, до рідкого становища, настільки сила тертя між розширить функціональні можливості пристрою конусами 9 буде менше, а частота f власних крушляхом вимірювання в'язкості не тільки рідких 9 45220 10 середовищ, але й середовищ, які мають велику динамічної системи, що найбільш точно відобрав'язкість та щільність. Використання пристрою, жають зміну впливу на згадану динамічну систему який заявляється, можливе не тільки у виробничих характеристик досліджуваного середовища. Викоумовах, але й у польових. Коливальний віскозиристовується коливальна система самоналагометр, що заявляється, може бути розташованим в джувального типу, динамічні характеристики якої конструкції баків для зберігання різноманітних резалежать тільки від жорсткості вмонтованих пружчовин, наприклад, фарби, бензину, нафти, а також них елементів (пружин) і від реологічних характев баках для пального літальних апаратів, в ємкосристик досліджуваного середовища, зокрема, від тях для зберігання пального на автозаправних в'язкості. станціях, в ємкостях для перевезення молока та Література: інше. Контроль за вимірюванням фізико-хімічних 1. А.с. СРСР№ 717625, 1980р., МІЖ G 01 N 11/16властивостей вищезазначених речовин, в цьому аналог. випадку, може вестись дистанційно. 2. А.с. СРСР№ 238875, 1966 p., МІЖ G 01 N 11/16 Підвищення ефективності застосування колианалог. вального віскозиметра, що заявляється, у порів3. А.с. СРСР№ 789704, 1980р., МІЖ G 01 N 11/16нянні з прототипом досягається за рахунок підвипрототип. щення точності визначення частоти коливань 4. Н. Й. Орел, Э. В. Губачек, Б. Й. Березин, В. М. рухомого вала з закріпленим на ньому датчиком Водолазская «Справочник технологав'язкості (конусом), який є зануреним у досліджуполиграфиста», часть 5, Печатные краски, Μ., ване середовище (речовину), а саме, за рахунок «Книга», 1988г., стр. 188-202, § 4.3 «Реологичевикористання авторезонансних режимів коливань ские свойства красок для издательских целей». 11 45220 12 13 45220 14 15 45220 16 17 45220 18 ДП «Український інститут промислової власності» (Укрпатент) вул. Сім’ї Хо хлових, 15, м. Київ, 04119, Україна (044) 456 – 20 – 90
ДивитисяДодаткова інформація
Автори англійськоюNykyforuk Bohdan Vasyliovych, Yershova Emma Oleksandrivna
Автори російськоюНикифорук Богдан Васильевич, Ершова Эмма Александровна
МПК / Мітки
МПК: G01F 1/56, G01N 11/16
Мітки: віскозиметр, коливальний
Код посилання
<a href="https://ua.patents.su/9-45220-kolivalnijj-viskozimetr.html" target="_blank" rel="follow" title="База патентів України">Коливальний віскозиметр</a>
Коливальний віскозиметр
Номер патенту: 44151
Опубліковано: 15.01.2002
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
МПК: G01N 11/16
Мітки: коливальний, віскозиметр
Формула / Реферат:
1. Коливальний віскозиметр, який містить корпус, контур збудження коливань, що містить спарений електромагніт, який відрізняється тим, що він додатково оснащений підсилювачем збудження низької частоти, блоком керування, електромагнітами блока керування, фазоінвертором, другим контуром збудження коливань, частотно-вибірковою ланкою, яка містить два двоконсольних вали із жорстко закріпленим на торці одній з його консолей диском, пружинами,...
Коливальний віскозиметр
Номер патенту: 37883
Опубліковано: 15.05.2001
Автори: Комаров Володимир Олександрович, Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/00, G01N 11/16
Мітки: коливальний, віскозиметр
Текст:
...Вал 13 з диском 14 почне провертатися у зворотній бік. У другий період коливань у роботу вступає др угий індукційний датчик 11 (на фіг. 1-3 симетрично розташований відносно осі вала 13 другий індукційний датчик, 11 конструктивно не показаний), сигнал з якого, після підсилення у підсилювачі збудження 18, буде надходити на два інших діагональне протилежних електромагніта 5, які впливають парою сил (другого знаку) на силопередавальну феромагнітну...
Коливальний віскозиметр

Номер патенту: 43225
Опубліковано: 15.11.2001
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
МПК: G01N 11/16
Мітки: віскозиметр, коливальний
Формула / Реферат:
1. Коливальний віскозиметр, який містить корпус, контур збудження коливань, який містить спарений електромагніт і датчик в'язкості, який відрізняється тим, що він додатково оснащений підсилювачем збудження, частотно-коливальною ланкою, яка містить двохконсольний вал з жорстко закріпленими на його вільному кінці пластинами, пружини і вузли настроювання жорсткості динамічної системи, індукційними датчиками, постійними магнітами, фазоінвертором,...
Віскозиметр
Номер патенту: 40911
Опубліковано: 15.08.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/16
Мітки: віскозиметр
Формула / Реферат:
1. Віскозиметр, який містить корпус із закріпленим у ньому датчиком в'язкості, джерело живлення, генератор звукових коливань і схему виміру вихідного сигналу датчика, який відрізняється тим, що він додатково містить електровібратори, виконані у вигляді котушок збудження, симетрично закріплених усередині корпуса, датчик лінійних переміщень, виконаний у вигляді блока котушок збудження, симетрично закріплених усередині корпуса між зазначеними...
Вібраційний віскозиметр
Номер патенту: 38939
Опубліковано: 15.05.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/16
Мітки: віскозиметр, вібраційний
Формула / Реферат:
(21) 2000116775(54) (57) Дата прийняття рішення 20 квітня 2001р. Вібраційний вискозиметр, що містить датчик із зондом, який виконано з нижнього і...
Попередній патент: Спосіб сотової розробки газогідратного морського родовища
Наступний патент: Пристрій для гемостазу
Випадковий патент: Спосіб експлуатації нафтової свердловини