Однопривідна механічна система з математичною функцією орієнтації панелей сонячних батарей
Номер патенту: 102364
Опубліковано: 25.06.2013
Автори: Мекердичан Леонід Петрович, Рєпкін Олександр Олександрович
Формула / Реферат
1. Однопривідна механічна система з математичною функцією орієнтації панелей сонячних батарей, що включає опорну нерухому частину, раму для кріплення сонячних панелей, обертовий пристрій з приводом та обертовим валом, виконана із можливістю зміни положення несучої рами сонячних панелей, яка відрізняється тим, що обертовий пристрій містить обертовий корпус, встановлений та з'єднаний через механізм передачі обертання із приводом з можливістю обертання на будь-який кут навколо центральної вертикальної осі опорної частини, на корпусі закріплена платформа з несучими стійками, які іншим кінцем з'єднані рухомо із рамою для кріплення сонячних панелей, яка шарнірно з'єднана із рамним штовхачем, що шарнірно з'єднаний із керуючою штангою, яка рухомо з'єднана із встановленою із нахилом віссю поворотної головки, з'єднаною через механізм для передачі обертання між перехресними валами із механізмом повороту вісі поворотної головки, що закріплений на опорній нерухомій частині, при цьому розміри ланок та кутів системи орієнтації сонячних батарей визначені геометрично та/або розраховані із урахуванням величини географічної широти місця установки сонячної батареї й кута нахилу сонця до землі.
2. Однопривідна механічна система з математичною функцією орієнтації панелей сонячних батарей за п. 1, яка відрізняється тим, що система виконана із можливістю налаштовування та/або перестроювання на потрібний режим.
Текст
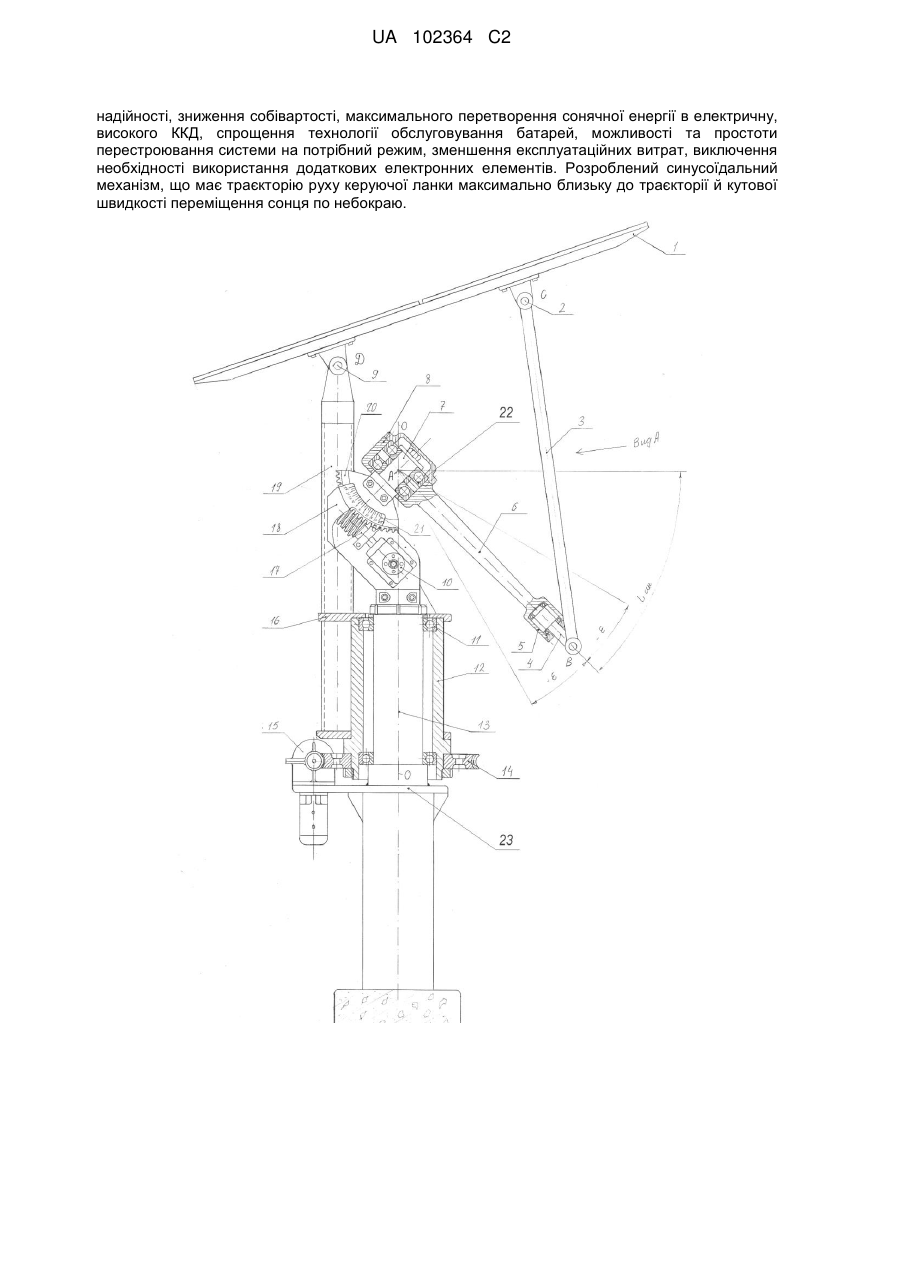
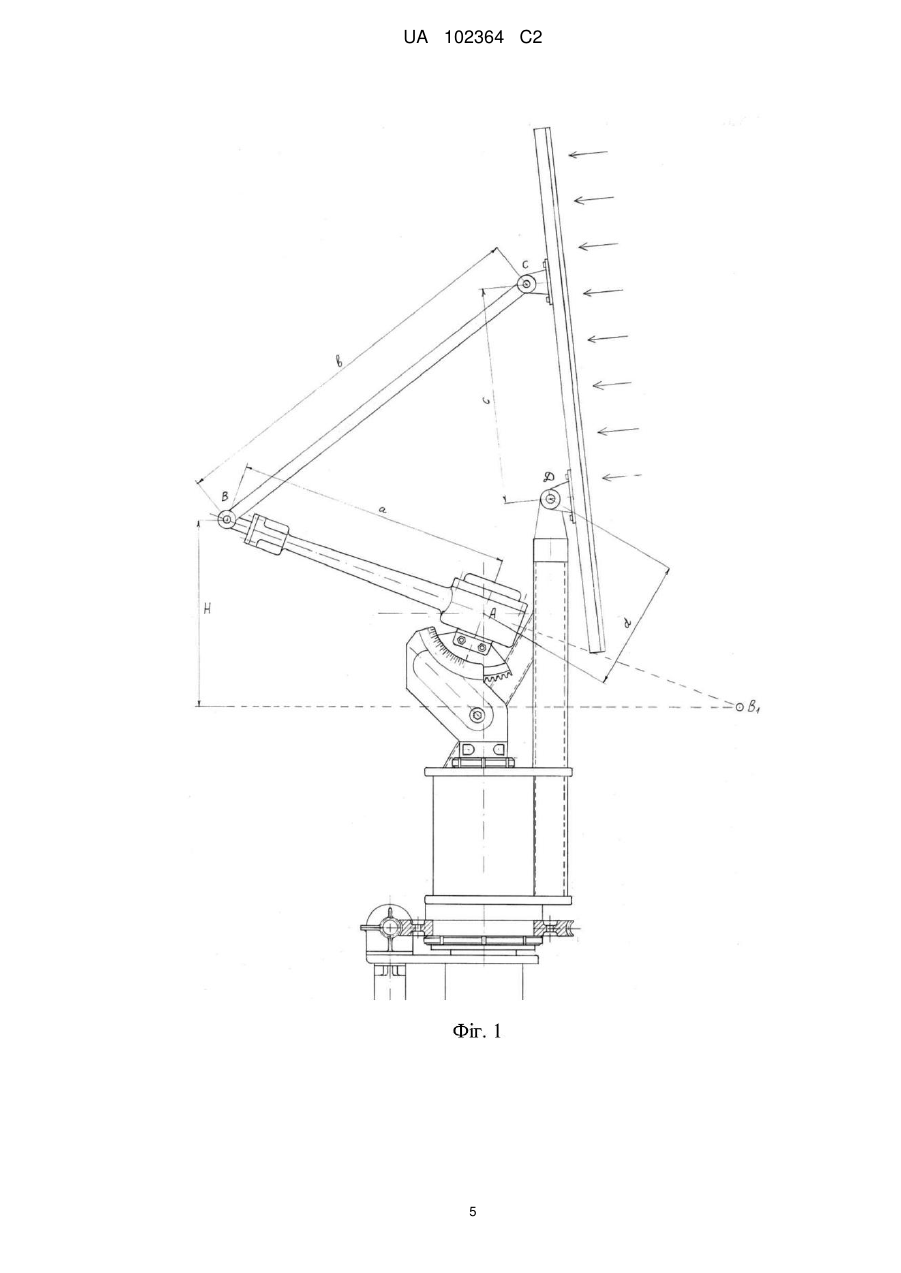
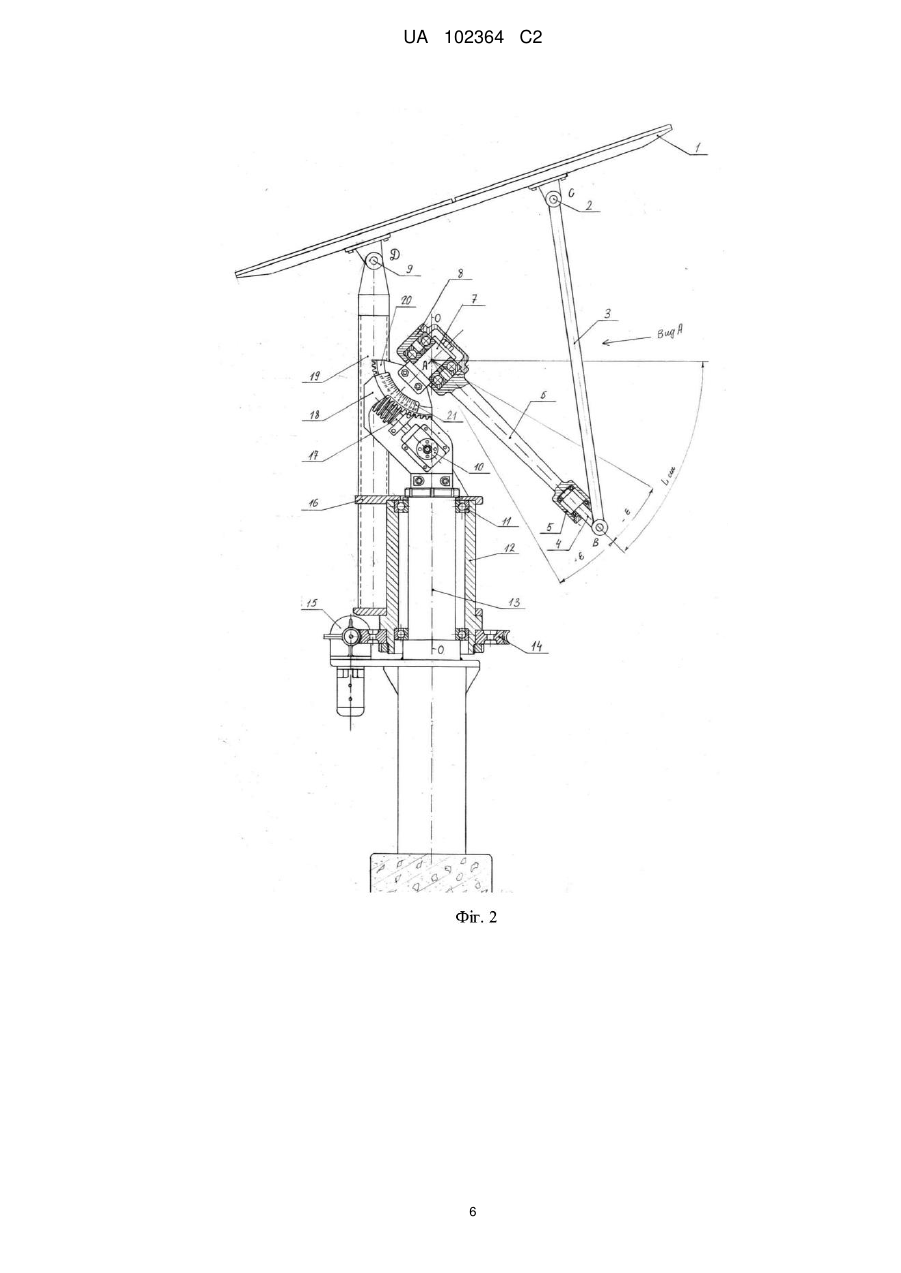
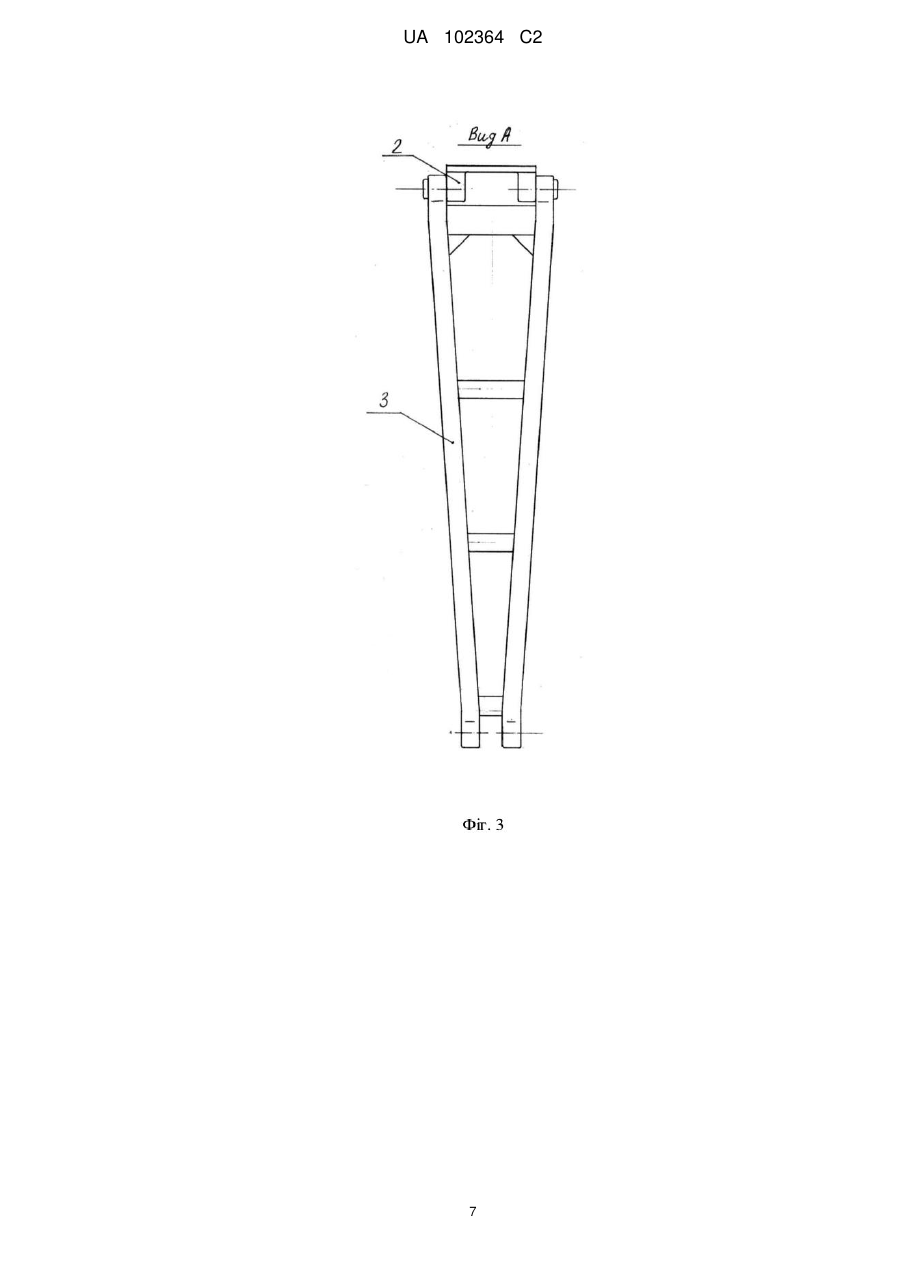
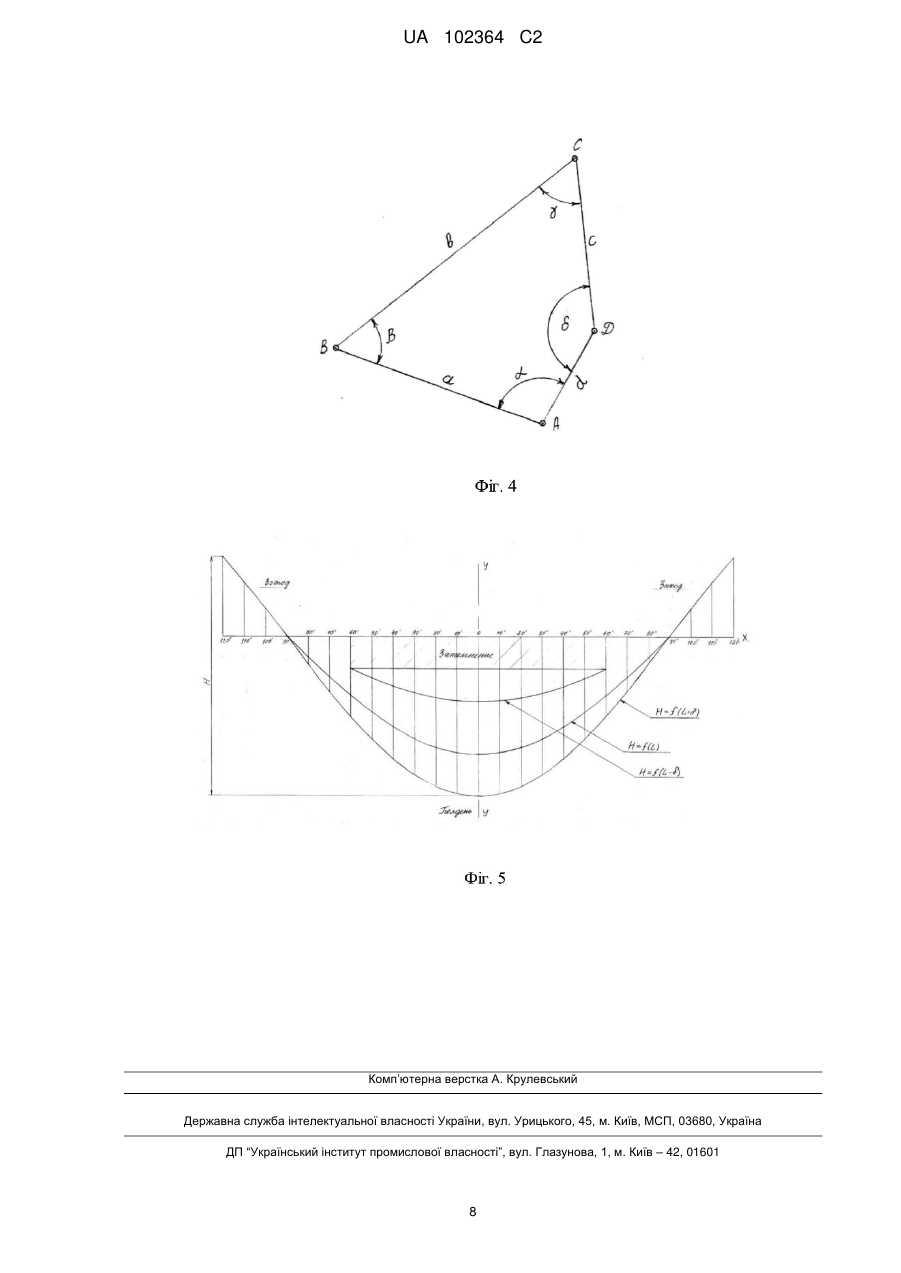
Реферат: Винахід належить до галузі теплоенергетики, а саме до сонячної теплоенергетики, і може бути використаний для орієнтації та підтримки панелей сонячних батарей на кутах для забезпечення максимального рівня перетворення сонячної енергії в електричну із урахуванням тривалості дня. Однопривідна механічна система з математичною функцією орієнтації панелей сонячних батарей включає опорну нерухому частину, раму для кріплення сонячних панелей, обертовий пристрій з приводом та обертовим валом, виконана із можливістю зміни положення несучої рами сонячних панелей. Обертовий пристрій містить обертовий корпус, встановлений та з'єднаний через механізм передачі обертання із приводом з можливістю обертання на будьякий кут навколо центральної вертикальної осі опорної частини. На корпусі закріплена платформа з несучими стійками, які іншим кінцем з'єднані рухомо із рамою для кріплення сонячних панелей, яка шарнірно з'єднана із рамним штовхачем, що шарнірно з'єднаний із керуючою штангою, яка рухомо з'єднана із встановленою із нахилом віссю поворотної головки, з'єднаною через механізм для передачі обертання між перехресними валами із механізмом повороту осі поворотної головки, що закріплений на опорній нерухомій частині. При цьому розміри ланок та кутів системи орієнтації сонячних батарей визначені геометрично та/або розраховані із урахуванням величини географічної широти місця установки сонячної батареї й кута нахилу сонця до землі. Система виконана із можливістю налаштовування та/або перестроювання на потрібний режим. Технічний результат полягає в забезпеченні високої UA 102364 C2 (12) UA 102364 C2 надійності, зниження собівартості, максимального перетворення сонячної енергії в електричну, високого ККД, спрощення технології обслуговування батарей, можливості та простоти перестроювання системи на потрібний режим, зменшення експлуатаційних витрат, виключення необхідності використання додаткових електронних елементів. Розроблений синусоїдальний механізм, що має траєкторію руху керуючої ланки максимально близьку до траєкторії й кутової швидкості переміщення сонця по небокраю. UA 102364 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі теплоенергетики, а саме до сонячної теплоенергетики, і може бути використаний для орієнтації та підтримки панелей сонячних батарей на кутах для забезпечення максимального рівня перетворення сонячної енергії в електричну із урахуванням тривалості дня. З рівня техніки відомі системи спостереження Deger, що постійно адаптують кут фотоелектричних модулів лицьовою поверхнею до сонця, так що кут випромінювання й інтенсивність світла залишаються постійними й може бути отримана максимальна електрична енергія. Для сонячних трекерів Deger використовують оптичні, напівпровідникові датчики для вирівнювання модулів у дугу сонця й сонячні датчики для розрахунку кількості сонячного світла, що падає на масив, у такий спосіб дозволяючи сонячним трекерам забезпечити рівномірний розподіл сонячного світла на масиві. З рівня техніки відома однопривідна шестиканальна система DEGER TOPtreker 8.5 (знайдено в Інтернет 16.10.2012 р. http://www.wirefreedirect.com/deger_solar_trackers.asp), що має похилу вісь повороту. Панелі, закріплені на цій осі, мають можливість за допомогою одного трекера повертатися ліворуч-праворуч, чим забезпечується можливість знімання додаткової енергії у порівнянні із стаціонарними батареями. Уся система, керована одним трекером, зв'язана з датчиком виміру інтенсивності сонячного випромінювання, що дозволяє розвертати панелі в зони з максимальною інтенсивністю. Така система має фіксований кут установки батарей, щодо якого вона повертається ліворучправоруч. Керуючий сигнал на розворот батареї надходить від датчика сонячної інтенсивності. Хоча в цілому система перевершує стаціонарні батареї, але не повністю використовує діаграму інтенсивності сонячного випромінювання. Крім цього відомі двопривідні системи DEGER traker Тур 5000 NT і Тур 9000 NT (знайдено в Інтернет 16.10.2012 р. http://www.wirefreedirect.com/deger_solar_trackers.asp). Системи мають по два керуючих трекери, зв'язані через командо-контролер з датчиком MLD, що визначає максимальну інтенсивність сонячного випромінювання або відбитого від хмар або землі світла. Один із трекерів управляє поворотом системи навколо вертикальної осі, другий - нахилом батареї на кути з максимальним рівнем перетворення сонячної енергії в електричну. Двотрекерні системи у процесі роботи практично повністю вписуються в діаграму сонячної інтенсивності, але мають високу вартість електронної апаратури, що стежить, та виконавчих трекерів. Найближчим аналогом вибрана сонячна фотоелектрична установка (патент України № 49604, F24J 2/02, опубл. 16.09.2002 р., бюл. № 9), яка включає вертикальний стояк, фундамент, обертовий пристрій з приводом і обертовим валом, дві ферми, сонячну панель і світлочутливу головку. Вертикальний стояк виконаний з двох частин, а саме з стаціонарного, жорстко з'єднаного з фундаментом, і обертового патрубка, на верхньому кінці якого в обох діаметрально протилежних стінках вмонтовано підшипники, в них встановлений обертовий вал, до якого з обох сторін обертового патрубка з однаковим кроком жорстко приєднані попередньо напружені шпренгельні прогони параболічного поздовжнього обрису, до них жорстко приєднана сонячна панель, переміщення якої в вертикальній площині здійснюється верхнім електродвигуном, кінематично зв'язаним з редуктором і циліндричною шестірнею, жорстко з'єднаною з обертовим валом, а весь цей вузол базується на несучій рамі, жорстко приєднаній до обертового патрубка, горизонтальне переміщення сонячної панелі здійснено за аналогічною схемою з застосуванням конічної шестірні, жорстко з'єднаної з обертовим патрубком, а цей вузол базується на несучій рамі, жорстко з'єднаній із стаціонарною частиною стояка, стійкість шпренгельних прогонів забезпечена хрестовими в'язками, приєднаними до кінців стиснених поясів шпренгельних прогонів і оснащених пристроями для натягу. Вказана установка містить світлочутливий елемент, із використанням якого здійснюють стеження за джерелом світла та здійснюється робота пристрою, тобто здійснення роботи можливе лише із використанням світлочутливого елементу. Як правило ці установки мають високу вартість і відповідно більш тривалий строк окупності, при цьому електронна система й блоки живлення у звичайному виконанні працюють стійко до -5 °C, при більш низьких температурах блоки живлення електродвигунів починають давати збої, а в електричних шафах накопичується конденсат. Існують спеціальні шафи й системи керування, що працюють при температурах до -35 °C у закритому виконанні із стабілізованими вихідними параметрами - такі системи мають високу вартість. Використання звичайних систем із урахуванням витрат на їх обігрів (приблизно 100 Вт) у багато разів вигідніше чим вартість таких спеціальних систем. До того ж, для обслуговування цих систем потрібний більш висококваліфікований персонал, потрібні додаткові більші витрати на обслуговування, пов'язані з великою довжиною кабелів, 1 UA 102364 C2 5 10 15 20 25 30 35 40 45 50 55 60 захистом їх від атмосферних опадів, обслуговуванням систем моніторингу й контролю положення сонячних панелей і т.д. В основу винаходу поставлена задача створення однопривідної механічної системи з математичною функцією орієнтації панелей сонячних батарей, що забезпечить високий ККД сонячних батарей за рахунок забезпечення максимального перетворення сонячної енергії в електричну, спрощення технології обслуговування батарей, можливість та простоту перестроювання системи на потрібний режим, зменшення експлуатаційних витрат. Поставлена задача досягається тим, що у однопривідній механічній системі з математичною функцією орієнтації панелей сонячних батарей, що включає опорну нерухому частину, раму для кріплення сонячних панелей, обертовий пристрій з приводом та обертовим валом, виконана із можливістю зміни положення несучої рами сонячних панелей, згідно із корисною моделлю, обертовий пристрій містить обертовий корпус, встановлений та з'єднаний через механізм передачі обертання із приводом з можливістю обертання на будь-який кут навколо центральної вертикальної осі опорної частини, на корпусі закріплена платформа з несучими стійками, які іншим кінцем з'єднані рухомо із рамою для кріплення сонячних панелей, яка шарнірно з'єднана із рамним штовхачем, що шарнірно з'єднаний із керуючою штангою, яка рухомо з'єднана із встановленою із нахилом віссю поворотної головки, з'єднаною через механізм для передачі обертання між перехресними валами із механізмом повороту осі поворотної головки, що закріплений на опорній нерухомій частині, при цьому розміри ланок та кутів системи орієнтації сонячних батарей визначені геометрично та/або розраховані із урахуванням величини географічної широти місця установки сонячної батареї й кута нахилу сонця до землі. Згідно із корисною моделлю, система виконана із можливістю налаштовування та/або перестроювання на потрібний режим. Технічний результат полягає в забезпеченні високої надійності, зниження собівартості, максимального перетворення сонячної енергії в електричну, високого ККД, спрощення технології обслуговування батарей, можливості та простоти перестроювання системи на потрібний режим, зменшення експлуатаційних витрат, виключення необхідності використання додаткових електронних елементів. Розроблений синусоїдальний механізм, що має траєкторію руху керуючої ланки максимально близьку до траєкторії й кутової швидкості переміщення сонця по небокраю. Загальний вигляд однопривідної механічної системи з математичною функцією орієнтації панелей сонячних батарей представлений на фіг. 1, 2, вигляд А - на фіг. 3. Система ланок a, b, c, d представлена на фіг. 4. Переміщення точки В керуючої штанги (6) залежно від пори року представлено на фіг. 5. Однопривідна механічна система з математичною функцією орієнтації панелей сонячних батарей складається із нерухомої й рухомої частин. Нерухома опорна частина включає основну опору батареї, на якій жорстко закріплена рама (23), привод - мотор-редуктор (15), опорна вісь (13) з напрямними щоками (18). Поворотна частина містить у собі черв'ячне колесо (14), жорстко зв'язане з обертовим корпусом (12), платформу (16), на якій закріплені несучі стійки (19), які іншим кінцем з'єднані рухомо через шарніри першого роду (9) із рамою для кріплення сонячних панелей (1), яка через шарнір першого роду (2) з'єднана із рамним штовхачем (3), що шарнірно з'єднаний із керуючою штангою (6). Обертовий корпус (12) встановлений з можливістю обертання на підшипниках (11). Конструкція поворотної частини така, що вона може обертатися навколо стаціонарної частини на будь-який кут. Несучі стійки (19), рама для кріплення сонячних панелей (1) і рамний штовхач (3) у крапках D, C, B мають шарніри першого роду, тобто рухливість обмежена однією площиною. По напрямних щоках (18), що містять шкалу (21), за допомогою черв'ячного вала (17), що є елементом механізму повороту осі поворотної головки (10), провертається відносно центра миттєвого обертання А механізм для передачі обертання між перехресними валами сектор черв'ячного колеса (20), на якому закріплена із нахилом відносно центра миттєвого обертання А вісь поворотної головки (7). На осі поворотної головки (7) через підшипники (22) закріплена поворотна голівка (8) з керуючою штангою (6). На кінці керуючої штанги (6) установлений вал-шарнір другого роду (4) із корпусом (5). При цьому триланковий механізм, що знаходиться між крапками D, C, B, має можливість руху тільки в одній площині, і, відповідно, рух штанги (6) також обмежений тією ж самою площиною. Система виконана таким чином, що штанга (6) при повороті навколо нахиленої осі поворотної головки (7) буде провертатися навколо осі AB і робити коливальні рухи в площині A, B, C, D. Розміри ланок та кутів системи орієнтації сонячних батарей визначають геометрично або розраховують із урахуванням величини географічної широти місця установки сонячної батареї й кута нахилу сонця до землі. При розрахуванні використовують наступні формули. 2 UA 102364 C2 5 10 15 20 25 30 35 40 45 Η = sinsin, де: Η - величина переміщення керуючого кінця штанги по вертикальній oci Y, де: - ±0… від осі північ-південь. - кут нахилу керуючої штанги, (6) =L , де: L - географічна широта установки сонячної батареї; - кут нахилу сонця до землі. При цьому кут нахилу сонця до землі для будь-якого дня року визначають по спрощеній формулі Купера: 360 d 851 360, 23 .45 365 де: d - номер дня от 1-365, для якого обчислюється значення кута нахилу сонця. Якщо кут L буде дорівнювати широті місцевості, то точка В керуючої штанги буде описувати траєкторію, відповідну до точок весняного й осіннього рівнодення. Якщо штангу провертають навколо точки А на кут ± , то отримують траєкторію руху точки В, відповідну літньому й зимовому сонцестоянню. Оскільки кут нахилу осі (7) має плавне регулювання, систему можна налаштовувати щодня. Практика показує, що регулювання по кутоміру досить проводити 1 раз на місяць. У горизонтальній площині система розвертається навколо вертикальної осі 0-0 з кутовою швидкістю землі: cos sin , sin2 sin2 де: - кут повороту сонця навколо осі обертання Землі; - географічна широта місцевості. Переміщення точки В керуючої штанги (6) залежно від пори року представлено на фіг. 5. Використовуючи метод інверсії механізму й ураховуючи те, що миттєвий центр обертання А завжди перебуває на осі O-O, систему ланок a, b, c, d (фіг. 4) можна розглядати як плоский чотириланковий механізм, для якого можна визначити всі кути ланок залежно від кута повороту керуючої штанги. З механіки відомо, що для чотириланкового механізму при відомих значеннях довжини ланок слушні наступні формули: ad cos a a 2 b 2 c 2 d2 , 2bc b sin a sin , arctg arctg c d cos a a cos 2 ac a b 2 c 2 d2 arccos cos . 2ab ab Працює система наступним чином. Із початком роботи системи крутний момент від поворотного корпусу (12) через несучі стійки (19), раму для кріплення сонячних панелей (несучу раму сонячних панелей) (1), штовхач (3), вал-шарнір (4) передається на керуючу штангу (6). У результаті складання двох рухів крапка В у просторі буде описувати синусоїду з переміщенням по осі Υ (фіг. 5). Панелі сонячних батарей, встановлені на несучій рамі, рухаються разом із несучою рамою (1) по забезпеченій заявленою конструкцією системи траєкторії, яка в свою чергу, забезпечує наведення панелей сонячних батарей на сонце протягом дня й координацію сонячних батарей на кути з максимальним перетворенням сонячної енергії в електричну. При необхідності систему налаштовують та/або перестроюють на потрібний режим. Оскільки кут нахилу осі (7) має плавне регулювання, систему можна налаштовувати щодня. Практика показує, що регулювання по кутоміру досить проводити 1 раз на місяць. Однопривідна механічна система з математичною функцією орієнтації панелей сонячних батарей, що заявляється, проста у виготовленні, а наведені відомості підтверджують можливість її промислового здійснення з використанням відомих матеріалів, звичайних комплектуючих виробів і стандартного устаткування. arccos 50 3 UA 102364 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 1. Однопривідна механічна система з математичною функцією орієнтації панелей сонячних батарей, що включає опорну нерухому частину, раму для кріплення сонячних панелей, обертовий пристрій з приводом та обертовим валом, виконана із можливістю зміни положення несучої рами сонячних панелей, яка відрізняється тим, що обертовий пристрій містить обертовий корпус, встановлений та з'єднаний через механізм передачі обертання із приводом з можливістю обертання на будь-який кут навколо центральної вертикальної осі опорної частини, на корпусі закріплена платформа з несучими стійками, які іншим кінцем з'єднані рухомо із рамою для кріплення сонячних панелей, яка шарнірно з'єднана із рамним штовхачем, що шарнірно з'єднаний із керуючою штангою, яка рухомо з'єднана із встановленою із нахилом віссю поворотної головки, з'єднаною через механізм для передачі обертання між перехресними валами із механізмом повороту вісі поворотної головки, що закріплений на опорній нерухомій частині, при цьому розміри ланок та кутів системи орієнтації сонячних батарей визначені геометрично та/або розраховані із урахуванням величини географічної широти місця установки сонячної батареї й кута нахилу сонця до землі. 2. Однопривідна механічна система з математичною функцією орієнтації панелей сонячних батарей за п. 1, яка відрізняється тим, що система виконана із можливістю налаштовування та/або перестроювання на потрібний режим. 4 UA 102364 C2 5 UA 102364 C2 6 UA 102364 C2 7 UA 102364 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюSingle-drive mechanical system with mathematical function of orientation of panels of solar batteries
Автори англійськоюRepkin Oleksandr Oleksandrovych, Mekerdychan Leonid Petrovych
Назва патенту російськоюОдноприводная механическая система с математической функцией ориентации панелей солнечных батарей
Автори російськоюРепкин Александр Александрович, Мекердичан Леонид Петрович
МПК / Мітки
МПК: F24J 2/52, F24J 2/54, F24J 2/00
Мітки: однопривідна, математичною, орієнтації, батарей, функцією, механічна, система, сонячних, панелей
Код посилання
<a href="https://ua.patents.su/10-102364-odnoprividna-mekhanichna-sistema-z-matematichnoyu-funkciehyu-oriehntaci-panelejj-sonyachnikh-batarejj.html" target="_blank" rel="follow" title="База патентів України">Однопривідна механічна система з математичною функцією орієнтації панелей сонячних батарей</a>
Однопривідна механічна система з математичною функцією орієнтації панелей сонячних батарей
Номер патенту: 76829
Опубліковано: 10.01.2013
Автори: Рєпкін Олександр Олександрович, Мекердичан Леонід Петрович
МПК: F24J 2/52, F24J 2/00, F24J 2/54
Мітки: батарей, однопривідна, математичною, панелей, функцією, механічна, система, сонячних, орієнтації
Формула / Реферат:
1. Однопривідна механічна система з математичною функцією орієнтації панелей сонячних батарей, що включає опорну нерухому частину, раму для кріплення сонячних панелей, обертовий пристрій з приводом та обертовим валом, виконана із можливістю зміни положення несучої рами сонячних панелей, яка відрізняється тим, що обертовий пристрій містить обертовий корпус, встановлений та з′єднаний через механізм передачі обертання із приводом з...
Універсальна система кріплення панелей сонячних батарей “актив”
Номер патенту: 74872
Опубліковано: 12.11.2012
Автори: Янцелевич Анатолій Олександрович, Кужельний Костянтин Борисович
МПК: H01L 31/00
Мітки: кріплення, актив, панелей, система, універсальна, батарей, сонячних
Формула / Реферат:
1. Універсальна система кріплення панелей сонячних батарей "АКТИВ", що містить опори, несучу конструкцію та засоби кріплення, яка відрізняється тим, що• опори виконано у вигляді ряду вертикальних палів,• несучу конструкцію виконано у вигляді принаймні двох паралельних між собою горизонтальних рядів опорних рійок, які є поздовжніми несучими елементами, та декількох паралельних між собою горизонтальних рядів несучих...
Спосіб орієнтації сонячних батарей космічного апарата на сонце
Номер патенту: 51710
Опубліковано: 26.07.2010
Автори: Загорулько Олександр Миколайович, Ян Ке, Кучерук Сергій Михайлович, Костенко Борис Олександрович, Козелкова Катерина Сергіївна
МПК: B64G 1/24
Мітки: сонце, сонячних, батарей, апарата, космічного, орієнтації, спосіб
Формула / Реферат:
Спосіб орієнтації сонячних батарей космічного апарата на Сонце, який полягає в тому, що для підвищення енергозабезпечення бортової апаратури КА панелі сонячних батарей орієнтуються на Сонце, який відрізняється тим, що використовується апріорна інформація про напрям на Сонце, яка записується в бортовому запам'ятовуючому пристрої та коригується у міру необхідності.
Очищувач панелей сонячних батарей
Номер патенту: 80197
Опубліковано: 13.05.2013
Автори: Петренко Сергій Юрійович, Бейлін Георгій Володимирович, Сидоренко Юрій Григорович
МПК: F24J 2/46
Мітки: панелей, очищувач, батарей, сонячних
Формула / Реферат:
1. Очищувач панелей сонячних батарей, що включає механізм його пересування вздовж панелей, живильний трубопровід для транспортування води та вузол очищення з щіткою, встановленою на механізмі пересування та призначеною для контактування з очищуваною поверхнею, який відрізняється тим, що очищувач забезпечений рушієм-гідромотором, вхід камери якого призначений для з'єднання з живильним трубопроводом, вузол очищення складається з двох несучих...
Пристрій оптимального використання сонячних батарей
Номер патенту: 54441
Опубліковано: 10.11.2010
Автори: Синєглазов Віктор Михайлович, Соченко Петро Степанович, Зеленков Олександр Аврамович, Маринич Таісія Олександрівна, Сидоренко Костянтин Миколайович, Євстропов Артем Андрійович, Власюк Ірина Іванівна
МПК: B60L 11/02, H01L 31/042
Мітки: оптимального, використання, батарей, пристрій, сонячних
Формула / Реферат:
1. Пристрій оптимального використання сонячних батарей, який містить сонячну батарею, прикріплену в центрі до вертикальної осі обертання в горизонтальній площині, а також поворотний по вертикалі механізм, який відрізняється тим, що введено n таких сонячних батарей, які установлені за допомогою каркасів кріплення на поворотних дисках в горизонтальній площині, які повертаються на маленьких колесах по рейках за допомогою перших електродвигунів,...
Попередній патент: Модульний водогрійний котел
Наступний патент: Свічка запалювання для двигунів внутрішнього згоряння
Випадковий патент: Пристрій для випуску високомінералізованих шахтних вод