Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ла для мобільної суміщеної лазерної вимірювальної системи
Номер патенту: 114662
Опубліковано: 10.03.2017
Автори: Сачук Ігор Іванович, Комишан Анатолій Іванович, Нарєжній Олексій Павлович, Щокіна Наталія Борисівна, Коломійцев Олексій Володимирович, Коваль Володимир Валерійович, Троцько Максим Леонідович, Ярош Сергій Петрович, Петренко Олексій Сергійович, Звєрєв Олексій Олексійович

Формула / Реферат
Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для мобільної суміщеної лазерної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, детектори, фільтри, формувачі імпульсів, тригери ("1"ǀ"0"), схеми "і", лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, підсилювачі (фільтри) сигналу похибки, виконавчі механізми, електронну обчислювальну машину, блок формування зображення, гіростабілізовану платформу та а - введення опорного сигналу з частотою Δνм від передавального лазера, б - введення сигналу від каналу оцінки тангенціальної швидкості (кутових швидкостей) літального апарата, який відрізняється тим, що додатково введено апаратуру обміну даними.
Текст
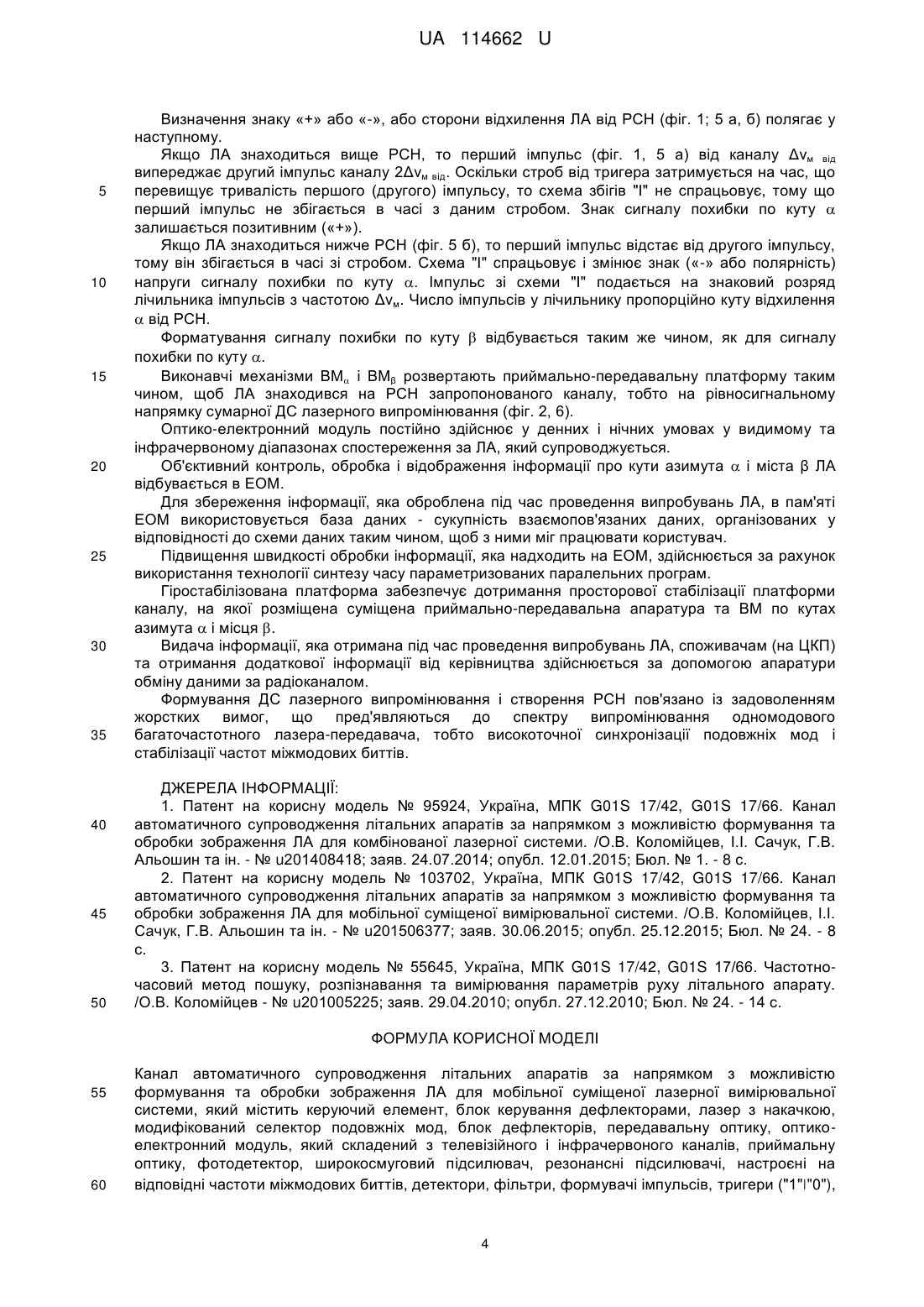
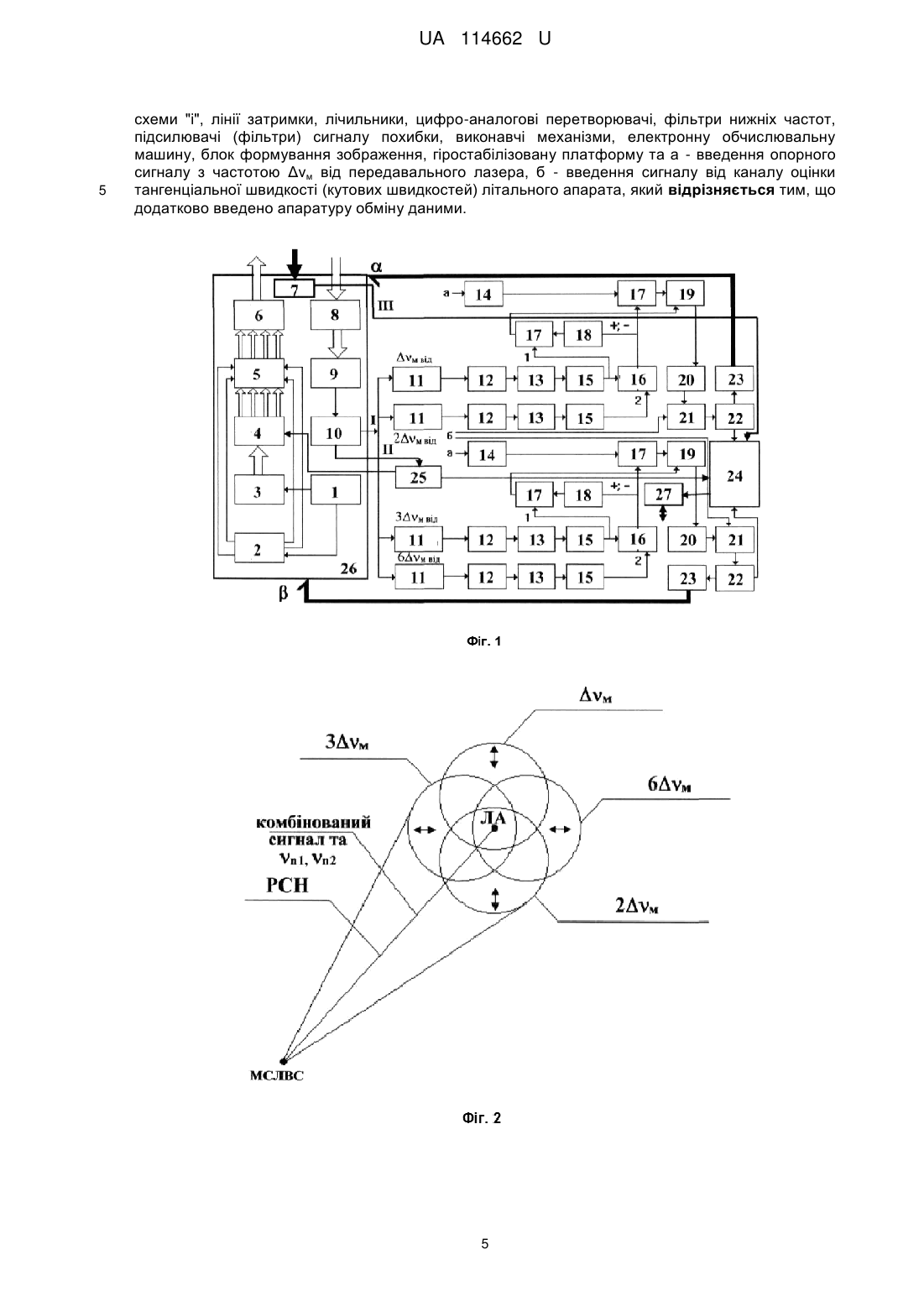
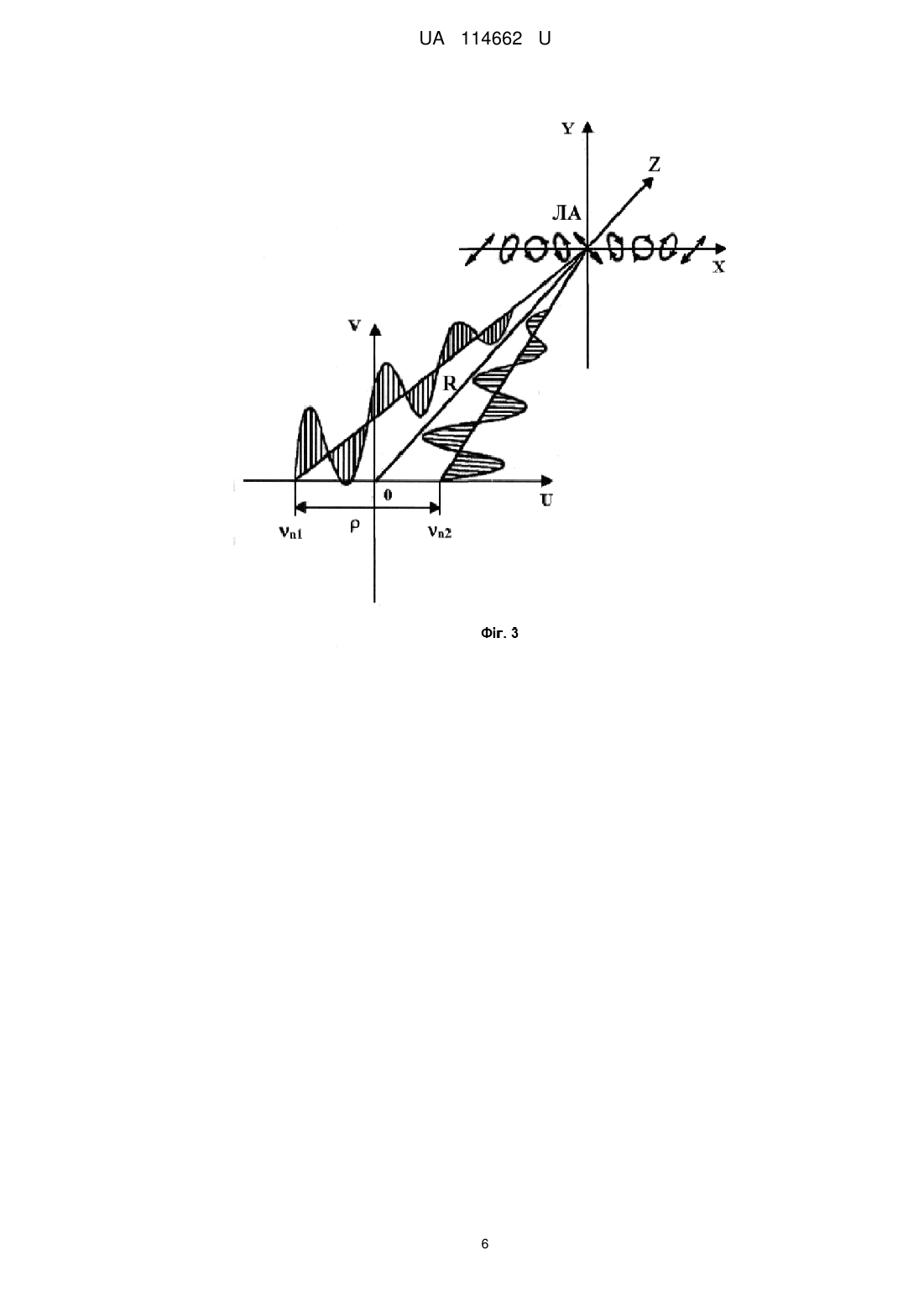
Реферат: Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для мобільної суміщеної лазерної вимірювальної системи містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптикоелектронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, детектори, фільтри, формувачі імпульсів, тригери ("1"ǀ"0") , схеми "і", лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, підсилювачі (фільтри) сигналу похибки, виконавчі механізми, електронну обчислювальну машину, блок формування зображення, гіростабілізовану платформу та а введення опорного сигналу з частотою Δνм від передавального лазера, б - введення сигналу від каналу оцінки тангенціальної швидкості (кутових швидкостей) літального апарата. Додатково введено апаратуру обміну даними. UA 114662 U (12) UA 114662 U UA 114662 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до галузі електрозв'язку і може бути використана для побудови передавальної частки мобільної суміщеної лазерної вимірювальної системи (МСЛВС). Відомий "Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для комбінованої лазерної системи" [1], який містить керуючий елемент (КЕ), блок керування дефлекторами (БКД), лазер з накачкою (Лн), модифікований селектор подовжніх мод (МСПМ), блок дефлекторів (БД), передавальну оптику (ПРДО), оптико-електронний модуль (OEM), який складений з телевізійного і інфрачервоного каналів, приймальну оптику (ПРМО), фотодетектор (ФТД), широкосмуговий підсилювач (ШП), резонансні підсилювачі (РП), настроєні на відповідні частоти міжмодових биттів, детектори (Дет), фільтри (Ф), формувачі імпульсів (ФІ), тригери ("1"ǀ"0") схеми "і" ("І"), лінії затримки (ЛЗ), лічильники (Лч), цифро-аналогові перетворювачі (ЦАП), фільтри нижніх частот (ФНЧ), підсилювачі (фільтри) сигналу похибки (ПСП), виконавчі механізми (ВМ), електронну обчислювальну машину (ЕОМ), блок формування зображення (БФЗ) та а - введення опорного сигналу з частотою Δνм від передавального лазера, б - введення сигналу від каналу оцінки тангенціальної швидкості (кутових швидкостей) літального апарату (ЛА). Недоліками відомого каналу є те, що він не забезпечує дотримання просторової стабілізації платформи, на якій розміщується суміщена приймально-передавальна апаратура та виконавчі механізми по кутах азимута і місця . Найбільш близьким до запропонованого технічним рішенням, вибраним як найближчий аналог є "Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для мобільної суміщеної вимірювальної системи" [2], який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптикоелектронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, детектори, фільтри, формувачі імпульсів, тригери ("1" ǀ"0"), схеми "і", лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, підсилювачі (фільтри) сигналу похибки, виконавчі механізми, електронну обчислювальну машину, блок формування зображення, гіростабілізовану платформу (ГСП) та а - введення опорного сигналу з частотою Δνм від передавального лазера, б - введення сигналу від каналу оцінки тангенціальної швидкості (кутових швидкостей) ЛА. Недоліком каналу-найближчого аналога є те, що він не здійснює обмін інформацією за радіоканалом з центральним командним пунктом (ЦКП). В основу корисної моделі поставлена задача створити канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для мобільної суміщеної лазерної вимірювальної системи, який дозволить здійснювати точне і стійке кутове автосупроводження ЛА при одночасному високоточному вимірюванні кутів азимута і міста , об'єктивний контроль ЛА у денний і нічний час, передачу до споживачів на ЦКП інформації, яка оброблена під час проведення випробувань ЛА, дотримання просторової стабілізації платформи, на якій розміщуються суміщена приймально-передавальна апаратура і ВМ по кутах азимута і місця та, в разі необхідності, формувати і обробляти зображення ЛА. Поставлена задача вирішується за рахунок того, що у канал-найближчий аналог, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, детектори, фільтри, формувачі імпульсів, тригери ("1" ǀ"0"), схеми "і", лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, підсилювачі (фільтри) сигналу похибки, виконавчі механізми, електронну обчислювальну машину, блок формування зображення, гіростабілізіровану платформу та а - введення опорного сигналу з частотою Δνм від передавального лазера, б - введення сигналу від каналу оцінки тангенціальної швидкості (кутових швидкостей) ЛА, додатково введено апаратуру обміну даними (АОД). Побудова каналу автоматичного супроводження літальних апаратів з можливістю формування та обробки зображення ЛА для мобільної суміщеної лазерної вимірювальної системи пов'язана з використанням одномодового багаточастотного із синхронізацією подовжніх мод випромінювання єдиного лазера-передавача, частотно-часового методу (ЧЧМ) [3], OEM та АОД. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у стійкому кутовому автосупроводженні ЛА при одночасному високоточному вимірюванні кутів 1 UA 114662 U 5 10 15 20 25 30 35 40 45 50 55 60 азимута і міста, здійсненні об'єктивного контролю у денних і нічних умовах, обміну інформацією зі споживачами, забезпеченні просторової стабілізації платформи та, в разі необхідності, формуванні і обробці зображення ЛА. На фіг. 1 приведена узагальнена структурна схема запропонованого каналу, де: а введення опорного сигналу з частотою Δνм (3Δνм) від лазера-передавача; б - введення сигналу від каналу оцінки тангенціальної швидкості (кутових швидкостей ' і ') ЛА; І - для визначення вимірювальної інформації; II - для визначення зображення ЛА та III - комбінований сигнал у видимому і інфрачервоному діапазонах. На фіг. 2 приведено створення рівносигнального напрямку (РСН) та сканування 4-ма діаграмами спрямованості (ДС) лазерного випромінювання в ортогональних площинах. На фіг. 3 приведено створення лазерного сигналу з просторовою модуляцією поляризації. На фіг. 4 приведені епюри напруг з виходів блоків запропонованого каналу. На фіг. 5 приведені епюри напруг з виходів блоків запропонованого каналу, які визначають полярність, де: а) - для визначення знаку «+»; б) - для визначення знаку «-». На фіг. 6 приведено кут відхилення ЛА від РСН відносно МСЛВС. Запропонований канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для мобільної суміщеної лазерної вимірювальної системи містить керуючий елемент 1, блок керування дефлекторами 2, лазер з накачкою 3, модифікований селектор подовжніх мод 4, блок дефлекторів 5, передавальну оптику 6, оптико-електронний модуль 7, який складений з телевізійного і інфрачервоного каналів, приймальну оптику 8, фотодетектор 9, широкосмуговий підсилювач 10, резонансні підсилювачі 11, настроєні на відповідні частоти міжмодових биттів, детектори 12, фільтри 13, формувачі імпульсів (ФІ1-14, ФІ2-15), тригери ("1"ǀ"0") 16, схеми "і" 17, лінії затримки 18, лічильники 19, цифро-аналогові перетворювачі 20, фільтри нижніх частот 21, підсилювачі (фільтри) сигналу похибки 22, виконавчі механізми 23, електронну обчислювальну машину 24, блок формування зображення 25, гіростабілізовану платформу 26, апаратуру обміну даними 27 та а - введення опорного сигналу з частотою Δνм від передавального лазера, б - введення сигналу від каналу оцінки тангенціальної швидкості (кутових швидкостей) ЛА. Робота запропонованого каналу автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для мобільної лазерної суміщеної вимірювальної системи полягає у наступному. Із синхронізованого одномодового багаточастотного спектра випромінювання лазерапередавача (Лн) за допомогою МСПМ виділяються необхідні пари частот і окремі частоти для створення: рівносигнального напрямку на основі формування сумарної ДС лазерного випромінювання, завдяки частково 4-х парціальних ДС, що перетинаються, за умови використання комбінацій подовжніх мод ("підфарбованих" різницевими частотами міжмодових биттів) Δν54=v5-v4=Δνм, Δν97=v9-v7=2Δνм, Δν63=v6-v3=3Δνм, Δν82=v8-v2=6Δνм; лазерного сигналу з просторовою модуляцією поляризації, за умови використання сигналу з подовжньої моди vn (в подальшому νn1, νn2). За допомогою МСПМ та блока формування зображення створюється лазерний сигнал з просторовою модуляцією поляризації шляхом розведення лазерного випромінювання (несучої частоти) на два променя з поворотом плоскості поляризації на кут 90° в одному з них (фіг. 3). При цьому випромінювання апертури першого і другого каналів в апертурної плоскості U0V рознесені на відстані р. Різність ходу пучків до картинної плоскості ЛА Х0У змінюється вдовж осі X від точки до точки. Обумовлена цим різність фаз між поляризованими компонентами, що ортогональні, поля у картинної плоскості також змінюється від точки до точки. В залежності від різності фаз у картинній плоскості змінюється вигляд поляризації сумарного поля сигналу, що зондує від лінійної через еліптичну і циркулюючу до лінійної, ортогональної к начальної і т.д. Період зміни вигляду поляризації визначається базою між випромінювачами ρ та відстанню до картинної плоскості R. Розподіл інтенсивності в реєстрованому зображенні ЛА промодульовано по гармонійному закону з коефіцієнтом модуляції, дорівнює значенню ступеня поляризації випромінювання, що відбито, в даній ділянці поверхні ЛА. Сигнал частот міжмодових биттів Δνм, 2Δνм, 3Δνм та 6Δνм надходить на блок дефлекторів, що складається з 4-х п'єзоелектричних дефлекторів. Парціальні ДС лазерного випромінювання попарно зустрічно сканують БД у кожній з двох ортогональних площин (фіг. 1, 2). Період сканування задається блоком керування дефлекторів, який разом з Лн живляться від керуючого елемента. 2 UA 114662 U 5 10 15 20 25 30 35 40 45 50 55 60 Проходячи через ПРДО, груповий лазерний імпульсний сигнал пар частот v5,v4=Δνм, ν9,ν7=2Δνм, v6,v3=3Δνм та v8,v2=6Δνм фокусується в скановані точки простору, оскільки здійснюється зустрічне сканування двома парами ДС лазерного випромінювання у кожній з двох ортогональних площин і (X і У), при цьому лазерний сигнал з просторовою модуляцією поляризації (νn1 та νn2) і комбінований сигнал OEM проходять вдовж рівносигнального напрямку (фіг. 2). Прийняті ПРМО від ЛА, відбиті в процесі сканування чотирьох ДС, лазерні імпульсні сигнали і огинаючи сигнали ДС лазерного випромінювання, за допомогою ФТД перетворюються в електричні імпульсні сигнали на різницевих частотах міжмодових биттів. Підсилені ШП вони розподіляються: - в БФЗ для обробки відбитого лазерного сигналу з просторовою модуляцією поляризації, що зондує, від поверхні ЛА; - по РП, що настроєні на відповідні частоти міжмодових биттів Δνм від, 2Δνм від, 3Δνм від, 6Δνм від. При цьому імпульсні сигнали радіочастоти, що надходять з РП Δνм від і РП 2Δνм від формують сигнал похибки по куту , а РП 3Δνм від і РП 6Δνм від - по куту . При відбитті лазерного сигналу з просторовою модуляцією поляризації, що зондує, від поверхні ЛА, змінюються амплітудні і фазові співвідношення між ортогонально поляризаційними компонентами, параметри їх поляризаційні і, відповідно, комплексні коефіцієнти когерентності відбитого поля. Просторовий розподіл поляризаційних характеристик такого відбитого сигналу по зміні контрасту модуляційної структури зображення несе також інформацію про типи матеріалів у складі поверхні ЛА, їх характеристики і тощо, яка відображається у ЕОМ. Тому у БФЗ здійснюється поляризаційна обробка поля, що приймається. Формування сигналу похибки по куту полягає у наступному. Введення імпульсного сигналу (а) з опорного каналу Δνм, перетвореного ФІ1 у "пачки" опорних імпульсів на частоті Δνм oп, надходить на схему "І". Виділений і посилений імпульсний сигнал з ΡΠ Δνм від частоти міжмодових биттів Δνм від (фіг. 4, 5) детектується Дет у виді огинаючей сигналу, що змінюється за законом руху ДС лазерного випромінювання і, після проходження Ф, перетворюється у ФІ2 у точках переходів періодів сканування в імпульси (один імпульс за період сканування), надходить на тригер "1", перекидуючи його. У цей же час, виділений і посилений ΡΠ 2Δνм від імпульсний сигнал частоти міжмодових биттів 2Δνм від детектується, виділяючи огинаючу сигналу, що змінюється за таким же законом і, проходячи Ф, перетворюється у ФІ2 у точках переходів періодів коливань в імпульси (один імпульс за період сканування) та надходить на тригер "0", встановлюючи його у вихідний стан. Задача виміру часового інтервалу із заданою точністю в схемі "І" полягає у встановленні критерію початку і кінця відліку часового інтервалу по визначених характеристиках значення імпульсних сигналів, що надходять на входи схеми "І". У зв'язку з тим, що передній фронт імпульсу досить малий у порівнянні з дозволом, що вимагається за часом, характерними значеннями сигналу, що визначають начало і кінець відліку часового інтервалу є граничне значення Uп (порогове значення напруги) (фіг. 5). Завдяки періодичному за цикл сканування відкриттю і закриттю тригером схеми "І" регулюється проходження імпульсів у схемі "І" від ФІ1, тобто відбувається виділення "пачок" імпульсів, число яких пропорційно куту відхилення ЛА від РСН (фіг. 5, 6). Підраховані лічильником імпульси перетворюються ЦАП в аналоговий сигнал похибки з необхідним знаком, що змішується у ФНЧ з імпульсним сигналом від каналу кутових швидкостей ЛА (б) для уточнення похибки збігу по кутах. Завдяки обліку вимірювальної інформації від каналу кутових швидкостей (б) у ФНЧ усуваються динамічна і флуктуаційна похибки фільтрації. Відфільтрований у ФНЧ і посилений підсилювачем сигналу похибки, отриманий сигнал відпрацьовується за допомогою виконавчого механізму (а), надходить від ПСП на вхід ЕОМ та виділяється в ній у вигляді числа, пропорційного вимірюваному куту азимута . Якщо ЛА знаходиться вище РСН, то на схему "І" першим надходить імпульс з ФІ2 міжмодової частоти Δνм від, а на тригер надходить другим імпульс з ФІ2 міжмодової частоти 2Δνм від (фіг. 1, 4-6). На схему "І" від тригера подається строб, тривалість якого пропорційна відхиленню ЛА від РСН. Цей часовий інтервал виміряється методом рахунку імпульсів частоти міжмодових биттів Δνм. Оскільки тривалість строба залежить лише від величини відхилення ЛА від РСН, а не від сторони відхилення, маємо схему визначення полярності сигналу похибки («+» або «-»). Якщо ЛА буде розташований нижче РСН, то першим надійде імпульс від ФІ2 з каналу 2Δνм , а другим - з каналу Δνм від. від 3 UA 114662 U 5 10 15 20 25 30 35 40 45 50 Визначення знаку «+» або «-», або сторони відхилення ЛА від РСН (фіг. 1; 5 а, б) полягає у наступному. Якщо ЛА знаходиться вище РСН, то перший імпульс (фіг. 1, 5 а) від каналу Δνм від випереджає другий імпульс каналу 2Δνм від. Оскільки строб від тригера затримується на час, що перевищує тривалість першого (другого) імпульсу, то схема збігів "І" не спрацьовує, тому що перший імпульс не збігається в часі з даним стробом. Знак сигналу похибки по куту залишається позитивним («+»). Якщо ЛА знаходиться нижче РСН (фіг. 5 б), то перший імпульс відстає від другого імпульсу, тому він збігається в часі зі стробом. Схема "І" спрацьовує і змінює знак («-» або полярність) напруги сигналу похибки по куту . Імпульс зі схеми "І" подається на знаковий розряд лічильника імпульсів з частотою Δνм. Число імпульсів у лічильнику пропорційно куту відхилення від РСН. Форматування сигналу похибки по куту відбувається таким же чином, як для сигналу похибки по куту . Виконавчі механізми ВМ і ΒΜβ розвертають приймально-передавальну платформу таким чином, щоб ЛА знаходився на РСН запропонованого каналу, тобто на рівносигнальному напрямку сумарної ДС лазерного випромінювання (фіг. 2, 6). Оптико-електронний модуль постійно здійснює у денних і нічних умовах у видимому та інфрачервоному діапазонах спостереження за ЛА, який супроводжується. Об'єктивний контроль, обробка і відображення інформації про кути азимута і міста β ЛА відбувається в ЕОМ. Для збереження інформації, яка оброблена під час проведення випробувань ЛА, в пам'яті ЕОМ використовується база даних - сукупність взаємопов'язаних даних, організованих у відповідності до схеми даних таким чином, щоб з ними міг працювати користувач. Підвищення швидкості обробки інформації, яка надходить на ЕОМ, здійснюється за рахунок використання технології синтезу часу параметризованих паралельних програм. Гіростабілізована платформа забезпечує дотримання просторової стабілізації платформи каналу, на якої розміщена суміщена приймально-передавальна апаратура та ВМ по кутах азимута і місця . Видача інформації, яка отримана під час проведення випробувань ЛА, споживачам (на ЦКП) та отримання додаткової інформації від керівництва здійснюється за допомогою апаратури обміну даними за радіоканалом. Формування ДС лазерного випромінювання і створення РСН пов'язано із задоволенням жорстких вимог, що пред'являються до спектру випромінювання одномодового багаточастотного лазера-передавача, тобто високоточної синхронізації подовжніх мод і стабілізації частот міжмодових биттів. ДЖЕРЕЛА ІНФОРМАЦІЇ: 1. Патент на корисну модель № 95924, Україна, МПК G01S 17/42, G01S 17/66. Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для комбінованої лазерної системи. /О.В. Коломійцев, І.І. Сачук, Г.В. Альошин та ін. - № u201408418; заяв. 24.07.2014; опубл. 12.01.2015; Бюл. № 1. - 8 с. 2. Патент на корисну модель № 103702, Україна, МПК G01S 17/42, G01S 17/66. Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для мобільної суміщеної вимірювальної системи. /О.В. Коломійцев, І.І. Сачук, Г.В. Альошин та ін. - № u201506377; заяв. 30.06.2015; опубл. 25.12.2015; Бюл. № 24. - 8 с. 3. Патент на корисну модель № 55645, Україна, МПК G01S 17/42, G01S 17/66. Частотночасовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарату. /О.В. Коломійцев - № u201005225; заяв. 29.04.2010; опубл. 27.12.2010; Бюл. № 24. - 14 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для мобільної суміщеної лазерної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптикоелектронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, детектори, фільтри, формувачі імпульсів, тригери ("1"ǀ"0"), 4 UA 114662 U 5 схеми "і", лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, підсилювачі (фільтри) сигналу похибки, виконавчі механізми, електронну обчислювальну машину, блок формування зображення, гіростабілізовану платформу та а - введення опорного сигналу з частотою Δνм від передавального лазера, б - введення сигналу від каналу оцінки тангенціальної швидкості (кутових швидкостей) літального апарата, який відрізняється тим, що додатково введено апаратуру обміну даними. 5 UA 114662 U 6 UA 114662 U 7 UA 114662 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 17/42, G01S 17/66
Мітки: апаратів, супроводження, автоматичного, лазерної, літальних, системі, вимірювальної, канал, напрямком, формування, мобільної, можливістю, суміщеної, обробки, зображення
Код посилання
<a href="https://ua.patents.su/10-114662-kanal-avtomatichnogo-suprovodzhennya-litalnikh-aparativ-za-napryamkom-z-mozhlivistyu-formuvannya-ta-obrobki-zobrazhennya-la-dlya-mobilno-sumishheno-lazerno-vimiryuvalno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ла для мобільної суміщеної лазерної вимірювальної системи</a>
Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення літальних апаратів для мобільної суміщеної вимірювальної системи
Номер патенту: 103702
Опубліковано: 25.12.2015
Автори: Носик Андрій Михайлович, Коваль Володимир Валерійович, Сосунов Олександр Олексійович, Толстолузька Олена Геннадіївна, Клівець Сергій Іванович, Луковський Олег Ярославович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович, Сачук Ігор Іванович, Ряшин Володимир Валерійович
МПК: G01S 17/66, G01S 17/42
Мітки: формування, зображення, апаратів, мобільної, канал, літальних, обробки, вимірювальної, напрямком, суміщеної, можливістю, супроводження, автоматичного, системі
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складається з телевізійного і інфрачервоного каналів, приймальної оптики, фотодетектора,...
Канал автоматичного супроводження літальних апаратів за напрямком з використанням частот міжмодових биттів та можливістю формування і обробки зображення ла для мобільної суміщеної вимірювальної системи
Номер патенту: 105333
Опубліковано: 10.03.2016
Автори: Журавльов Олександр Олександрович, Макаров Сергій Анатолійович, Носик Андрій Михайлович, Малюга Андрій Вячеславович, Альошин Геннадій Васильович, Сачук Ігор Іванович, Садовий Костянтин Віталійович, Коломійцев Олексій Володимирович, Левченко Михайло Антонович, Щипанський Павло Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: міжмодових, можливістю, вимірювальної, частот, суміщеної, формування, биттів, мобільної, зображення, автоматичного, літальних, обробки, апаратів, напрямком, супроводження, системі, використанням, канал
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком з використанням частот міжмодових биттів та можливістю формування і обробки зображення ЛА для мобільної суміщеної вимірювальної системи, що містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод з багаточастотним розділенням каналів, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і...
Канал автоматичного супроводження літальних апаратів (ла) за напрямком з використанням частот міжмодових биттів та можливістю пошуку, формування і обробки зображення ла для мобільної суміщеної вимірювальної системи
Номер патенту: 108667
Опубліковано: 25.07.2016
Автори: Луковський Олег Ярославович, Звєрєв Олексій Олексійович, Кожушко Ярослав Миколайович, Сачук Ігор Іванович, Тимочко Олександр Іванович, Шулежко Василь Володимирович, Коломійцев Олексій Володимирович, Герасимов Сергій Вікторович, Альошин Геннадій Васильович, Копилов Олександр Олексійович
МПК: G01S 17/66, G01S 17/42
Мітки: системі, літальних, можливістю, апаратів, биттів, супроводження, використанням, міжмодових, канал, суміщеної, автоматичного, зображення, напрямком, обробки, мобільної, вимірювальної, ла, пошуку, частот, формування
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів (ЛА) за напрямком з використанням частот міжмодових биттів та можливістю пошуку, формування і обробки зображення ЛА для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод з багаточастотним розділенням каналів, модифікований блок дефлекторів, передавальну оптику, оптико-електронний модуль, який...
Канал автоматичного супроводження літальних апаратів за напрямком з можливістю розпізнавання ла для мобільної суміщеної лазерної вимірювальної системи
Номер патенту: 114059
Опубліковано: 27.02.2017
Автори: Подорожняк Андрій Олексійович, Балабуха Олексій Сергійович, Звєрєв Олексій Олексійович, Нікіфоров Ігор Анатолійович, Гриб Ростислав Миронович, Сачук Ігор Іванович, Купрій Володимир Миколайович, Гриб Дмитро Анатолійович, Пєвцов Геннадій Володимирович, Коломійцев Олексій Володимирович
МПК: G01S 17/42
Мітки: розпізнавання, автоматичного, апаратів, напрямком, системі, канал, суміщеної, лазерної, літальних, супроводження, вимірювальної, можливістю, мобільної
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком з можливістю розпізнавання ЛА для мобільної суміщеної лазерної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач,...
Канал автоматичного супроводження літальних апаратів за напрямком для мобільної суміщеної лазерної вимірювальної системи
Номер патенту: 112370
Опубліковано: 12.12.2016
Автори: Звєрєв Олексій Олексійович, Помогаєв Ігор Володимирович, Садовий Костянтин Віталійович, Клівець Сергій Іванович, Альошин Геннадій Васильович, Литвиненко Михайло Іванович, Толстолузька Олена Геннадіївна, Долина Михайло Петрович, Сачук Ігор Іванович, Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: мобільної, системі, вимірювальної, канал, напрямком, літальних, лазерної, суміщеної, супроводження, автоматичного, апаратів
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком для мобільної суміщеної лазерної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, модифікований блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі,...