Спосіб визначення вологості повітря радіоакустичним зондуванням атмосфери
Номер патенту: 115725
Опубліковано: 11.12.2017
Автори: Бабкін Станіслав Іванович, Карташов Володимир Михайлович, Толстих Єлизавета Геннадіївна
Формула / Реферат
Спосіб визначення вологості атмосферного повітря радіоакустичним зондуванням атмосфери, який полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють неоднорідності середовища, які виникають під дією акустичного імпульсу, електромагнітними хвилями, довжина хвилі яких удвоє більше довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають відбиті акустичним імпульсом електромагнітні хвилі, вимірюють амплітуду і частоту допплерівського зсуву прийнятих електромагнітних хвиль, причому приймання відбитих від акустичного імпульсу електромагнітних хвиль здійснюють після їх повторного відбиття від підстеляючої поверхні, для чого розміщують приймальну антену над підстеляючою поверхнею та орієнтують її таким чином, що напрямок максимуму діаграми направленості приймальної радіоантени співпадає з центром фокальної плями відбитих електромагнітних хвиль на підстеляючій поверхні, який відрізняється тим, що вимірюють кути відхилення напрямку максимуму діаграми направленості приймальної радіоантени на центр плями по азимуту та куту місця під дією горизонтального вітру від вихідного положення цих кутів при відсутності вітру, розраховують швидкість горизонтального вітру, розраховують групову швидкість акустичного імпульсу, розраховують амплітуду прийнятих електромагнітних хвиль при розповсюдженні акустичного імпульсу вздовж траси зондування для умови відсутності горизонтального вітру та визначають показник її ослаблення, надалі амплітуду піддають кореляційній обробці для визначення фазової швидкості розповсюдження акустичного імпульсу, розраховують температуру повітря вздовж траси зондування, отримані показник ослаблення амплітуди та значення температури використовують для визначення вологості повітря.
Текст
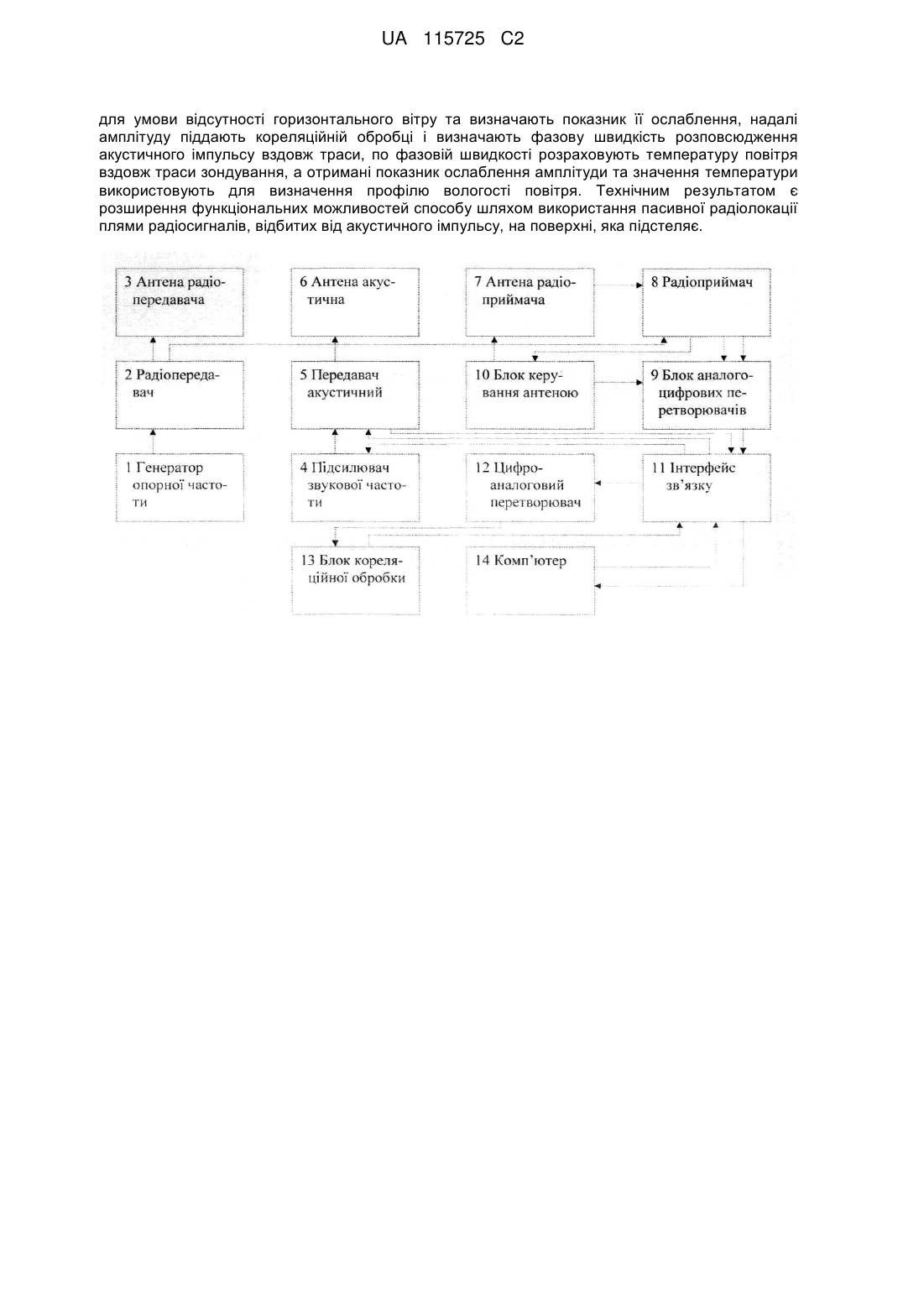
Реферат: Спосіб визначення вологості повітря радіоакустичним зондуванням атмосфери належить до радіолокаційної метеорології, а саме до радіоакустичних способів вимірювання метеорологічних величин атмосфери, і може бути використаний при метеорологічному забезпеченні екологічного моніторингу атмосфери у зоні розміщення АБС та сховищ енергоносіїв, комплексів метеорологічного забезпечення стартів космічних апаратів, безпеки зльоту і посадки літальних апаратів різного призначення, при складанні короткострокових прогнозів погоди, при складанні радіокліматичних карт, досліджень з фізики атмосфери, зокрема туманів різного походження і таке інше. Спосіб полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють неоднорідності середовища, які виникають під дією акустичного імпульсу, електромагнітними хвилями, довжина хвилі яких удвоє більше довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають відбиті акустичним імпульсом електромагнітні хвилі, вимірюють амплітуду і частоту допплерівського зсуву прийнятих електромагнітних хвиль, причому приймання відбитих від акустичного імпульсу електромагнітних хвиль здійснюють після їх повторного відбиття від підстеляючої поверхні, для чого розміщують приймальну антену над підстеляючою поверхнею та орієнтують її таким чином, що напрямок максимуму діаграми скерованості приймальної радіоантени співпадає з центром фокальної плями відбитих електромагнітних хвиль на підстеляючій поверхні, вимірюють кути відхилення напрямку максимуму діаграми скерованості приймальної радіоантени на центр плями по азимуту та куту місця під дією горизонтального вітру від вихідного положення них кутів при відсутності вітру і розраховують швидкість горизонтального вітру, по допплерівському зсуву частоти розраховують групову швидкість акустичного імпульсу, розраховують амплітуду прийнятих електромагнітних хвиль при розповсюдженні акустичного імпульсу вздовж траси зондування UA 115725 C2 (12) UA 115725 C2 для умови відсутності горизонтального вітру та визначають показник її ослаблення, надалі амплітуду піддають кореляційній обробці і визначають фазову швидкість розповсюдження акустичного імпульсу вздовж траси, по фазовій швидкості розраховують температуру повітря вздовж траси зондування, а отримані показник ослаблення амплітуди та значення температури використовують для визначення профілю вологості повітря. Технічним результатом є розширення функціональних можливостей способу шляхом використання пасивної радіолокації плями радіосигналів, відбитих від акустичного імпульсу, на поверхні, яка підстеляє. UA 115725 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до радіолокаційної метеорології, а саме до радіоакустичних способів вимірювання метеорологічних величин атмосфери, і може бути використаний при метеорологічному забезпеченні екологічного моніторингу атмосфери у зоні розміщення АЕС та сховищ енергоносіїв, комплексів метеорологічного забезпечення стартів космічних апаратів, безпеки зльоту і посадки літальних апаратів різного призначення, при складанні короткострокових прогнозів погоди, при складанні радіокліматичних карт, досліджень з фізики атмосфери, зокрема туманів різного походження і таке інше. Відомий спосіб вимірювання вологості для дистанційного визначення вологості атмосферного повітря [А.С. СССР № 671535, MIIKGOIS 13/95, опубл. 23.11.84. Бюл. № 43], згідно з яким у атмосферу випромінюють акустичний імпульс з синусоїдальним заповненням довжиною хвилі λа, опромінюють акустичний імпульс, який розповсюджується, за допомогою радіолокаційної станції електромагнітним випромінюванням довжиною хвилі 2λа, приймають відбитий від акустичного імпульсу радіолокаційний сигнал, вимірюють потужність відбитого радіолокаційного сигналу у кожній точці траси, за якою знаходять коефіцієнт послаблення звуку у кожній точці, визначають профіль температури по висоті і по отриманих значеннях температури та коефіцієнта послаблення звуку знаходять значення вологості, які розшукуються, для кожної точки траси; профіль температури визначають по швидкості розповсюдження акустичного імпульсу шляхом вимірювання допплерівського зсуву частот відбитого радіолокаційного сигналу. Недоліком цього способу є недостатня точність вимірювання вологості повітря через відсутність апріорної інформації про вертикальний розподіл швидкості горизонтального вітру в реальних умовах зондування. Вітер здійснює горизонтальне перенесення акустичного імпульсу, останній виноситься вітром з діаграм скерованості антен радіоканалу, внаслідок чого потужність радіосигналів, що приймаються, зменшується без впливу молекулярного поглинання енергії акустичного імпульсу, яке є основою даного способу [Е.Г.Прошкин, В.М.Карташов, Бабкин С.И., Волох А.В. Современное состояние, проблемы и перспективы систем радиоакустического зондирования. Радиотехника: Всеукр. меж вед. научн.-техн. сб. Вып. 150, 2007. С. 5-16.]. Відомий радіоакустичний спосіб визначення вологості повітря [А.С.СССР № 1780071, G01S 13/95 опубл. 07.12.92, бюл. №45], згідно з яким випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс, що розповсюджується, електромагнітним сигналом, довжина хвилі якого удвоє більше довжини хвилі акустичного імпульсу, приймають відбитого від акустичного імпульсу електромагнітного сигналу та вимірюють його потужності і частоти допплерівського зсуву, визначення температури повітря і коефіцієнта ослаблення звуку, визначення вологості за значеннями температури і коефіцієнта ослаблення звуку, одночасно з основним випромінюють додатковий акустичний імпульс, приймають електромагнітний сигнал, відбитий від додаткового акустичного імпульсу, та вимірюють його потужність, приймають відбитий від температурних неоднорідностей атмосфери сумарний (основний та додатковий) акустичний сигнал та вимірюють його потужність і допплерівський зсув частоти, приймають відбитий від вітрових неоднорідностей атмосфери сумарний акустичний відбитий сигнал і вимірюють його потужність, причому визначення коефіцієнта ослаблення звуку проводять з урахуванням потужностей електромагнітних сигналів, відбитих від основного і додаткового акустичних імпульсів, та потужностей сумарних акустичних сигналів, відбитих від температурних і вітрових неоднорідностей, а частоту допплерівського зсуву сумарного акустичного сигналу використовують при визначенні температури повітря, причому точку випромінювання додаткового акустичного імпульсу виносять назустріч вітру на відстань 0,5-5 м від точки випромінювання основного акустичного імпульсу, сумарний акустичний сигнал, відбитий від температурних неоднорідностей атмосфери, приймають у точці випромінювання основного акустичного імпульсу, а сумарний акустичний сигнал, відбитий від вітрових неоднорідностей атмосфери, приймають у точці, винесеної назустріч вітру по лінії, яка проходить через точки випромінювання акустичних імпульсів, у напрямку на трасу зондування під кутом 45 до обрію. Недоліками такого способу дистанційного визначення вологості повітря радіоакустичним зондуванням атмосфери є невисока точність вимірювання вологості повітря через приблизний характер просторового розміщення додаткових акустичних випромінювачів через відсутність апріорної інформації про вертикальний розподіл швидкості вітру при проведенні зондування, необхідність додаткових акустичних випромінювачів, низька оперативність вимірювань при оптимізації їх розміщення. Найближчим за технічною суттю до заявленого є спосіб радіоакустичного зондування атмосфери [А.С.СССР №1658105, GO IS 13/95, опубл. 23.06.91. Бюл. № 23], згідно з яким випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, 1 UA 115725 C2 5 10 15 20 25 30 35 40 45 50 55 опромінюють неоднорідності середовища, які виникають під дією акустичного імпульсу, електромагнітними хвилями, довжина хвилі яких удвоє більше довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають відбиті акустичним імпульсом електромагнітні хвилі, вимірюють амплітуду та частоту допплерівського зсуву відбитих електромагнітних хвиль, розраховують за вимірюваними амплітудою та частотою допплерівського зсуву відбитих радіохвиль параметри атмосфери, а приймання відбитих радіохвиль здійснюють після їх повторного відбиття від підстеляючої поверхні, для чого розміщують приймальну антену над підстеляючою поверхнею та орієнтують її таким чином, що напрямок максимуму діаграми скерованості приймальної антени співпадав з центром фокальної плями відбитих радіохвиль на підстеляючій поверхні, сфокусованій сферичними фронтами акустичного імпульсу. Нажаль, цей спосіб не дозволяє вимірювати вологість повітря. В основу винаходу радіоакустичного способу визначення вологості атмосферного повітря поставлена задача розширення функціональних можливостей способу шляхом використання пасивної радіолокації плями радіосигналів, відбитих від акустичного імпульсу, на поверхні, яка підстеляє. Ця задача вирішена наступним чином. У радіоакустичному способі визначення вологості атмосферного повітря, який полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють неоднорідності середовища, які виникають під дією акустичного імпульсу, електромагнітними хвилями, довжина хвилі яких удвоє більше довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають відбиті акустичним імпульсом електромагнітні хвилі, вимірюють амплітуду і частоту допплерівського зсуву прийнятих електромагнітних хвиль, причому приймання відбитих від акустичного імпульсу електромагнітних хвиль здійснюють після їх повторного відбиття від підстеляючої поверхні, для чого розміщують приймальну антену над підстеляючою поверхнею та орієнтують її таким чином, що напрямок максимуму діаграми скерованості приймальної радіоантени співпадає з центром фокальної плями відбитих електромагнітних хвиль на підстеляючій поверхні, згідно з винаходом, вимірюють кут відхилення напрямку максимуму діаграми скерованості приймальної радіоантени на центр плями по азимуту та куту місця під дією горизонтального вітру від вихідного положення цих кутів при відсутності вітру і розраховують швидкість горизонтального вітру, по допплерівському зсуву частоти розраховуюсь групову швидкість акустичного імпульсу, розраховують амплітуду прийнятих електромагнітних хвиль при розповсюдженні акустичного імпульсу вздовж траси зондування для умови відсутності горизонтального вітру та визначають показник її ослаблення, надалі амплітуду піддають кореляційній обробці і визначають фазову швидкість розповсюдження акустичного імпульсу вздовж траси, по фазовій швидкості розраховують температуру повітря вздовж траси зондування, а отримані показник ослаблення амплітуди та значення температури використовують для визначення профілю вологості повітря. На фіг. 1 подано структурну схему пристрою для реалізації пропонованого способу. Розглянемо більш докладно пропонований спосіб. Пропонований спосіб ґрунтується на відомій залежності поглинання енергії акустичних хвиль від кількості водяної пари у атмосферному повітрі [Каллистратова М.А., Кон А.И. Радиоакустическое зондирование атмосферы.- М.: Наука. 1985.- С. 35]. При радіоакустичному зондуванні потужність прийнятих електромагнітних хвиль реальної атмосфери залежить від цілого ряду факторів: атмосферних (вітер, температура і вологість повітря, атмосферний тиск, турбулентність) та методичних (умова Брега, дзеркальність відбиття електромагнітних хвиль). Експериментальні дослідження впливу різних факторів (наприклад, Е.Г.Прошкин, В.М.Карташов, С.И.Бабкин, А.В. Волох. Современное состояние, проблемы и перспективы систем радиоакустического зодирования// Радиотехника. Всеукр. межвед. научно-техн. сб.Харків: ХНУРЕ - 2007. Вып. 150, с. 5-16) довели, що основним атмосферним фактором, який найбільше впливає на рівень потужності радіосигналів, що приймаються при радіоакустичному зондуванні, є горизонтальний вітер: через винесення акустичного імпульсу з діаграм скерованості антен радіоканалу потужність помітно знижується. Відділити таке зниження потужності від зменшення потужності, що виникає при зміні параметра розстроювання умови Брега, практично неможливо. Це і є одним із джерел виникнення похибки вимірювань вологості повітря відомими способами, які як інформаційний параметр радіосигналу використовують потужність прийнятих сигналів. Для підвищення точності вимірювань вологості повітря радіоакустичним зондуванням необхідно мати достовірну апріорну інформацію про вертикальний розподіл горизонтальної швидкості вітру у шарі метеорологічних спостережень. Наявність такої інформації дозволяє визначити вплив горизонтального вітру на ослаблення 2 UA 115725 C2 5 потужності радіосигналів, що приймаються, та скорегувати її для обчислення показника ослаблення, обумовленого дією вологості повітря на поглинання енергії звукових хвиль. Потужність прийнятих радіосигналів Р в залежності від співвідношення реальних швидкостей акустичного імпульсу і середнього горизонтального вітру у шарі зондування визначається як [Каллистратова М.А., Кон А.И. Радиоакустическое зондирование атмосферы.- М.: Наука. 1985.- С. 121] 2 2R 2 , (1) 0 exp 2r 2 r 2 a де Р0 - потужність відбитого радіосигналу у точці траси, де W 0 ; W 10 15 20 25 30 35 40 45 - середнє C1 значення поперечного числа Маха у шарі атмосфери 0R метрів, W - середня швидкість горизонтального вітру, С1 - групова швидкість акустичного імпульсу, 2rа і 2r - ефективні діаметри акустичного випромінювача і передавальної радіоантени відповідно. Отримані значення потужності прийнятих з кожного рівня реєстрації радіосигналів можна скоригувати (без урахування дії вітру) згідно з виразом 0 , . (2) 2 2 R 2 exp 2r 2 r 2 a Отримання інформації про вертикальний розподіл горизонтальної швидкості вітру пропонується здійснювати способом пасивної локації радіосигналів, відбитих від акустичного імпульсу і сфокусованих його сферичними фазовими фронтами в пляму на поверхню, яка підстеляє. Для реалізації пасивної радіолокації плями приймальна радіоантена розміщується на щоглі таким чином, що напрямок максимуму діаграми скерованості приймальної радіоантени направлений на центр плями. Під впливом горизонтальної швидкості вітру акустичний імпульс переноситься вітром горизонтально над підстеляючою поверхнею, внаслідок чого фокальна пляма /мігрує по площині /від вихідного положення у залежності від швидкості та напрямку вітру (див. рис.2 статті Kartashov V.M., Babkin S.I., Tolstykh E.G. Passive location of a spot of scattered signals at radio acoustic atmospheric sounding. Applied Radio Electronics. Scientific and Technical Journal. 2015, V.I4, #1, P. 59-63), що і є основою вимірювання параметрів горизонтального вітру. Слідкування за фокальною плямою здійснюється за допомогою приймальної радіоантени, здатної до переміщень максимуму її діаграми скерованості на центр фокальної плями по азимуту та куту місця, які виникають при міграції плями під дією горизонтального вітру від вихідного положення цих кутів при відсутності вітру. Для створення такого типу радіоантен використовуються методи максимальної чи мінімальної амплітуди прийнятого сигналу, або метод рівних сигналів [Васин В.В., Власов О.В., В.В.Григорин-Рябов и др./ Радиолокационные устройства// Под ред. В.В.Григорина-Рябова.- М: Советское радио, 1970.- 680 с.]. Визначення кутів напрямку максимуму діаграми скерованості приймальної радіоантени здійснюється за допомогою сельсин-давачів, які механічно зв'язані з валами двигунів азимутального приводу та приводу по куту місця [Современная радиолокация. Пер. с англ. Под ред. Ю.Б. Кобзарева.- М.: Советское радио, 1969.-704 с.]. У залежності від напрямку вітру для формування фокальної плями на площині Р' використовується передавальні акустична антена А та радіоантена П, які розміщені нормально сторонам квадрата у точках 1, 2,3, 4 таким чином, щоб при відсутності вітру фокальна пляма знаходилась у вихідній точці F0 (при знаходженні акустичного пакета на висоті нижньої точці вимірювання параметрів вітру). Для наведеної схеми антенного пристрою системи РАЗ з пасивною радіолокацією формули для розрахунку параметрів вітру W та φw мають такий вигляд: Z W 0 tg 0 cos 0 tg 1 cos 1 2 tg 0 sin 0 tg 1 sin 1 2 (3) t та tg 0 sin 0 tg 1 sin 1 w arctg , (4) tg 0 cos 0 tg 1 cos 1 де - азимут проекції напрямку максимуму діаграми скерованості приймальної радіоантени на підстеляючу поверхню, - кут місця напрямку максимуму діаграми скерованості приймальної радіоантени. 3 UA 115725 C2 5 10 15 20 25 30 Другий атмосферний параметр у виразі (1), необхідний для розрахунку потужності електромагнітних хвиль, прийнятих при зондуванні в умовах дії горизонтального вітру, а саме, групова швидкість С1 акустичного імпульсу при його вертикальному розповсюдженні, визначається вимірюванням допплерівського зсуву частоти прийнятих електромагнітних хвиль як Fd C1 , (5) 2 де Fd - допплерівський зсув частоти прийнятих радіосигналів, λ - довжина хвилі прийнятих радіосигналів (Радиолокационные устройства/ Васин В.В, Власов О.В., Григорин-Рябов В.В. и др.// Под ред. Григорина-Рябова В.В. -М.: Советское радио, 1970.- 680 с). Фазова швидкість розповсюдження акустичного імпульсу у реальній атмосфері обумовлюється конкретними значеннями атмосферного тиску, температури і вологості повітря, теплоємностями сухого повітря і водяної пари [Ультразвук. Маленькая энциклопедия. Гл. ред. И.П. Голямина. - М: Советская энциклопедия.- 1979. - 400 с.]. Ця залежність у загальному виді може бути подана як Ca Fa a , (6) де C a - фазова швидкість, Fa - частота випромінених у атмосферу акустичних коливань, a - довжина акустичної хвилі. Фазову швидкість розповсюдження звуку в атмосфері методом радіоакустичного зондування можна одночасно виміряти по значенню розстроювання умови Брега згідно з виразом 2 Fa Ca , (7) 4f / C e q де Се - швидкість розповсюдження електромагнітних хвиль, f - частота електромагнітних хвиль, q - параметр розстроювання умови Брега [В.М.Карташов В.М., С.В.Пащенко. Алгоритм формирования оценок максимального правдоподобия параметров сигнала, рассеянного акустическим волновым пакетом.- Радиотехника. Всеукр. межвед. науч.-техн. сборник, вып. 164.-2011.- С. 35-40]. А параметр розстроювання умови Брега можна знайти за допомогою кореляційної обробки прийнятих радіосигналів [Карташов В.М., Бабкін СІ., Волох.А.В., Семеняка А.В., Пащенко СВ., Яценко П.О. Спосіб радіоакустичного зондування атмосфери для дистанційної реєстрації вертикального профілю температури повітря. Патент України № 89344. Опубл. 11.01.2010. Бюл. № 1]. У такому випадку температура повітря може бути розрахована з використанням формули: 2 35 40 45 50 2 Fa , C 273,15 , (8) 2f 20 q Cs яка отримана з використанням формули (7) з роботи [Карташов В.М., Волох А.В., Родионова В.В. Тела неопределенности зондирующих сигналов систем радиоакустического зондирования атмосферы. -- Радиотехника. Всеукр. меж-вед, науч.-техн. сборник. 2007. Вып. 150. С. 94-99.] З використанням скорегованої амплітуди прийнятих електромагнітних хвиль (2) при розповсюдженні акустичного імпульсу вздовж траси зондування визначається показник її ослаблення, а власне амплітуда піддається кореляційній обробці для визначення фазової швидкості розповсюдження акустичного імпульсу (7). За значеннями фазової швидкості розраховується температура повітря (8) вздовж траси зондування. Отримані ж показник ослаблення амплітуди та значення температури використовуються для визначення вертикального профілю вологості повітря. Таким чином, при радіолокації плями сигналів, відбитих від акустичного імпульсу з синусоїдальним заповненням, може бути досягнутою максимальна точність вимірювання вологості повітря за рахунок виключення впливу горизонтального вітру на результати зондування. Реалізація запропонованого способу здійснюється таким чином. Визначення парціального тиску водяної пари повітря проводять за допомогою системи радіоакустичного зондування з пасивною локацією фокальної плями. При цьому вертикально угору випромінюють акустичний імпульс синусоїдальним заповненням, акустичний імпульс опромінюють електромагнітними коливаннями з довжиною хвиль удвоє більшими довжин хвиль синусоїдального заповнення акустичного імпульсу. Параметри акустичного імпульсу - середню 4 UA 115725 C2 частоту синусоїдального заповнення, тривалість, а період повторення - формують за допомогою звукової карти персонального комп'ютера. Значення цих параметрів вибирають у такий спосіб, щоб умова Брега виконувалась на заданій висоті (практично, на нижній висоті) зондування Надалі термометром вимірюють приземну температуру повітря на рівні верхнього 5 10 15 20 25 30 35 40 45 50 55 60 зрізу акустичної антени і розраховують швидкість звуку за наближеною формулою Ca 20 , де - температура повітря у градусах Кельвіна, а також довжину акустичної хвилі, необхідної для виконання умови Брега на цьому рівні для заданої довжини хвилі електромагнітного коливання системи радіоакустичного зондування [Каллистратова М, А., Кон А.И. Радиоакустическое зондирование атмосферы. - М.: Наука. 1985.-С. 121]. Відбиті від акустичного імпульсу електромагнітні коливання приймають, підсилюють та виділяють допплерівсокий зсув частоти цих коливань. За допомогою автоматичної системи слідкування за рухомою ціллю (фокальної плями) вимірюють кути відхилення напрямку максимуму діаграми скерованості приймальної радіоантени на центр плями по азимуту та куту місця φ1 та β1 відповідно під дією горизонтального вітру від вихідного положення цих кутів φ 0 та β0 при відсутності вітру і розраховують швидкість горизонтального вітру згідно з виразом (3,4), по допплерівському зсуву частоти розраховують групову швидкість акустичного імпульсу. Використовуючи співвідношення реальних швидкостей акустичного імпульсу і середнього горизонтального вітру у шарі зондування розраховують амплітуду прийнятих електромагнітних хвиль при розповсюдженні акустичного імпульсу вздовж траси зондування для умови відсутності горизонтального вітру на ній та визначають показник її ослаблення. Надалі амплітуду піддають кореляційній обробці і визначають фазову швидкість розповсюдження акустичного імпульсу вздовж траси, по фазовій швидкості розраховують температуру повітря вздовж тієї траси, а отримані показник ослаблення амплітуди та значення температури використовують для визначення вертикального профілю вологості повітря. Всі розрахунки швидкостей горизонтального вітру і акустичного імпульсу, корегованих значень амплітуди, показника ослаблення і температури повітря для визначення парціального тиску водяної пари виконуються згідно з відповідними програмами персональним комп'ютером за командами, які формує комп'ютер. Він же задає середню частоту синусоїдального заповнення, види функції розсіяння для генераторів опорної напруги та при необхідності - кількість зондувань (тривалість часу необхідного осереднення одиничних значень парціального тиску водяної пари, що традиційно для вимірювань у метеорології) та термін виводу результатів визначення парціального тиску водяної пари на екран монітора або до зовнішніх засобів відображення метеорологічної інформації. Розглянемо пристрій для реалізації пропонованого способу. Структурна схема пристрою наведена на фіг. 1. Пристрій містить генератор опорної частоти 1, вихід якого підключено до входу радіопередавача 2, першим виходом підключеного до входу антени радіопередавача 3, а другим - до першого входу радіоприймача 8, підсилювач звукової частоти 4, вихід якого підключений до входу передавача акустичного 5, антену акустичну 6, вхід якої підключений до виходу передавача акустичного 5, антену радіоприймача 7, вихід якої підключено до другого входу радіоприймача 8, перший вихід якого підключений до першого входу блока аналогоцифрових перетворювачів 9, другий вихід радіоприймача 8 підключений до другого входу блока аналого-цифрових перетворювачів 9, третій вихід радіоприймача 8 підключено до входу блока керування антеною 10, перший вихід якого підключений до другого входу блока аналогоцифрових перетворювачів 9, а другий вихід блока керування антеною 10 - до входу антени радіоприймача 7, а вихід блока аналого-цифрових перетворювачів 9 підключений до першого входу інтерфейсу зв'язку 11, до другого входу інтерфейсу зв'язку 11 підключений другий вихід передавача акустичного 5, другий вхід якого підключений до першого виходу інтерфейсу зв'язку 11, другий вихід інтерфейсу зв'язку 11 підключений до входу підсилювача звукової частоти 4, третій вихід інтерфейсу зв'язку 11 підключений до входу цифро-аналогового перетворювача 12, вихід якого підключений до входу блока кореляційної обробки 13, вихід якого підключений до третього входу інтерфейсу зв'язку 11, четвертий вхід якого підключений до виходу комп'ютера 14, а вхід комп'ютера 14 підключений до четвертого виходу інтерфейсу зв'язку 11. Робота пристрою. Перед зондуванням у комп'ютер 14, програма роботи якого має вісім підпрограм: підпрограму зондування, підпрограму формування звукового імпульсу, підпрограму розрахунку функцій розсіювання для кореляційної обробки сигналів, підпрограму визначення q, підпрограму розрахунку горизонтальної швидкості вітру і групової швидкості акустичного імпульсу, підпрограму розрахунку амплітуди прийнятих сигналів без вітру у шарі зондування та коефіцієнт ослаблення амплітуди з висотою, підпрограму кореляційної обробки скорегованої амплітуди прийнятих радіосигналів, підпрограму розрахунку фазової швидкості акустичного імпульсу і температури повітря. Одночасно вводяться дані: про дату та час зондування, 5 UA 115725 C2 5 10 15 20 25 30 35 40 45 50 55 60 довжину електромагнітних хвиль, значення частоти зондування Fa, тривалість та період повторення звукового імпульсу, кількість звукових імпульсів, необхідних для зондування, кількість градацій N для q, значення приземної температури повітря, яка вимірюється термометром. Генератор опорної частоти 1 генерує неперервні коливання високої частоти з високою стабільністю, які подаються на вхід радіопередавача 2, де формуються вихідні коливання радіопередавача 2 заданої потужності, які подаються на вхід антени радіопередавача 3, де перетворюються у електромагнітні коливання та випромінюються вертикально угору. За командою "Пуск" комп'ютер 14 за допомогою звукової карти генерує звуковий імпульс із заданими параметрами тривалості та періодом повторення і частотою синусоїдального заповнення Fa, який подається на вхід підсилювача звукової частоти 4, у якому коливання звукової частоти попередньо підсилюються та подаються до входу передавача акустичного 5, де підсилюються до заданої потужності і з виходу якого подаються до входу антени акустичної 6, за допомогою якої електричні коливання звукової частоти перетворюються у потужні акустичні коливання, які випромінюються у напрямку зондування атмосфери. Відбиті від акустичного імпульсу електромагнітні коливання приймаються антеною радіоприймача 7, перетворюються нею у електричні коливання, надходять на вхід радіоприймача 8, де і підсилюються у радіоприймачі 8 за допомогою частки потужності коливань радіопередавача 2 виділяється сигнал допплерівського зсуву частоти цих коливань, який подається на вхід блока аналого-цифрових перетворювачів 9, а за допомогою амплітудного детектора виділяється обвідна амплітуд сигналу допплерівського зсунення частоти цих коливань, яка також подається на блок аналого-цифрових перетворювачів 9. За допомогою спеціальної конструкції антени радіоприймача 7, наприклад, фазованої решітки, на виході радіоприймача також формуються сигнали похибок, які відповідають переміщенню максимуму діаграми скерованості антени радіоприймача 7 на центр фокальної плями по азимуту φ та куту місця β, які виникають при міграції плями під дією горизонтального вітру, від вихідного положення цих кутів при відсутності вітру. Амплітуда сигналів похибки положення антени радіоприймача подається на вхід блока аналого-цифрових перетворювачів 9, де перетворюється у цифровий вигляд і далі передається через інтерфейс зв'язку 11 у комп'ютер 14, за допомогою якого здійснюється розрахунок параметрів вітру на момент зондування за виразами (3,4). З виходу блока аналого-цифрових перетворювачів 9 сигнал допплерівського зсуву частоти подається через інтерфейс зв'язку 11 на вхід комп'ютера 14 для обчислення значень частоти допплерівського зсуву, наприклад, за методом ШПФ и подальшого розрахунку групової швидкості акустичного імпульсу (вираз 5). Обвідна амплітуд сигналу допплерівського зсуву частоти прийнятих електромагнітних коливань з виходу блока аналого-цифрових перетворювачів 9 подається через інтерфейс зв'язку 11 на вхід комп'ютера 14, де програмно здійснюється коригування значень обвідної амплітуд і для умови зондування без дії вітру (вирази 1 та 2). Виправлена обвідна сигналу допплерівської частоти з виходу комп'ютера 14 через інтерфейс зв'язку подається на цифроаналоговий перетворювач 12, з виходу якого обвідна сигналу у аналоговій формі надходить на корелятор блока кореляційної обробки 13. Визначене у блоці кореляційної обробки 13 значення параметра Брега q через інтерфейс зв'язку 11 надходить на вхід персонального комп'ютера 14 для обчислення значень фазової швидкості акустичного імпульсу відповідно до виразу (7), які використовуються для розрахунку одиничних значень температури повітря (вираз 8) на всіх рівнях траси за допомогою комп'ютера 14. За розрахованими параметрами вітру та групової швидкості акустичного імпульсу надалі обчислюється виправлена обвідна амплітуд прийнятих сигналів. Отримані значення обвідної амплітуд для всіх рівнів траси зондування слугують визначенню коефіцієнта послаблення амплітуди сигналів з висотою. Всі розрахунки швидкостей горизонтального вітру і акустичного імпульсу, корегованих значень амплітуди, показника ослаблення і температури повітря для визначення парціального тиску водяної пари виконуються, згідно з відповідними програмами персональним комп'ютером за командами, які формує комп'ютер. Він же задає середню частоту синусоїдального заповнення, види функції розсіяння для генераторів опорної напруги та - при необхідності кількість зондувань (тривалість часу необхідного осереднення одиничних значень парціального тиску водяної пари, що традиційно для вимірювань у метеорології) та термін виводу результатів визначення парціального тиску водяної пари на екран монітора або до зовнішніх засобів відображення метеорологічної інформації. По значеннях коефіцієнта послаблення амплітуди сигналів на заданих рівнях траси зондування та температури повітря на цих рівнях визначають вологість повітря згідно з відомим 6 UA 115725 C2 5 10 співвідношенням між коефіцієнтом молекулярного послаблення звуку заданої довжини хвилі та відносної (або абсолютної) вологості повітря. По закінченні розрахунків комп'ютер 14 генерує команду "Стоп" для системи радіоакустичного зондування і видає одиничне значення парціального тиску водяної пари (або іншу характеристику вологості повітря) у таблицю на моніторі або на інший засіб відтворення та збереження метеорологічної інформації (або профіль характеристики вологості, яка розшукується). Таким чином, розрахунок парціального тиску водяної пари у повітрі з використанням пасивної радіолокації плями радіосигналів, відбитих від акустичного імпульсу, на поверхні, яка підстеляє, дає можливість отримати підвищену точність визначення вологості повітря одно частотним радіоакустичним зондуванням. ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 Спосіб визначення вологості атмосферного повітря радіоакустичним зондуванням атмосфери, який полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють неоднорідності середовища, які виникають під дією акустичного імпульсу, електромагнітними хвилями, довжина хвилі яких удвоє більше довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають відбиті акустичним імпульсом електромагнітні хвилі, вимірюють амплітуду і частоту допплерівського зсуву прийнятих електромагнітних хвиль, причому приймання відбитих від акустичного імпульсу електромагнітних хвиль здійснюють після їх повторного відбиття від підстеляючої поверхні, для чого розміщують приймальну антену над підстеляючою поверхнею та орієнтують її таким чином, що напрямок максимуму діаграми направленості приймальної радіоантени співпадає з центром фокальної плями відбитих електромагнітних хвиль на підстеляючій поверхні, який відрізняється тим, що вимірюють кути відхилення напрямку максимуму діаграми направленості приймальної радіоантени на центр плями по азимуту та куту місця під дією горизонтального вітру від вихідного положення цих кутів при відсутності вітру, розраховують швидкість горизонтального вітру, розраховують групову швидкість акустичного імпульсу, розраховують амплітуду прийнятих електромагнітних хвиль при розповсюдженні акустичного імпульсу вздовж траси зондування для умови відсутності горизонтального вітру та визначають показник її ослаблення, надалі амплітуду піддають кореляційній обробці для визначення фазової швидкості розповсюдження акустичного імпульсу, розраховують температуру повітря вздовж траси зондування, отримані показник ослаблення амплітуди та значення температури використовують для визначення вологості повітря. 7 UA 115725 C2 Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Автори англійськоюBabkin Stanislav Ivanovych, Kartashov Volodymyr Mykhailovych
Автори російськоюБабкин Станислав Иванович, Карташов Владимир Михайлович
МПК / Мітки
МПК: G01S 13/95
Мітки: зондуванням, спосіб, повітря, атмосфери, радіоакустичним, вологості, визначення
Код посилання
<a href="https://ua.patents.su/10-115725-sposib-viznachennya-vologosti-povitrya-radioakustichnim-zonduvannyam-atmosferi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення вологості повітря радіоакустичним зондуванням атмосфери</a>
Спосіб дистанційної реєстрації вертикальних профілів температури повітря радіоакустичним зондуванням атмосфери
Номер патенту: 89342
Опубліковано: 11.01.2010
Автори: Семеняка Андрій Вікторович, Бабкін Станіслав Іванович, Пащенко Сергій Васильович, Яценко Павло Олексійович, Карташов Володимир Михайлович, Волох Андрій Вікторович
МПК: G01S 13/95
Мітки: профілів, спосіб, атмосфери, температури, вертикальних, радіоакустичним, дистанційно, повітря, зондуванням, реєстрації
Формула / Реферат:
Спосіб дистанційної реєстрації вертикального профілю температури повітря радіоакустичним зондуванням атмосфери, який полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, відбиті від акустичних імпульсів,...
Спосіб дистанційної реєстрації вертикальних профілів температури повітря радіоакустичним зондуванням атмосфери
Номер патенту: 105441
Опубліковано: 12.05.2014
Автори: Карташов Володимир Михайлович, Куля Дмитро Миколайович, Бабкін Станіслав Іванович
МПК: G01S 13/95
Мітки: зондуванням, температури, радіоакустичним, дистанційно, вертикальних, спосіб, профілів, реєстрації, повітря, атмосфери
Формула / Реферат:
Спосіб дистанційної реєстрації вертикального профілю температури повітря радіоакустичним зондуванням атмосфери, що полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, відбиті від акустичного імпульсу,...
Спосіб дистанційного вимірювання горизонтальної швидкості вітру радіоакустичним зондуванням атмосфери
Номер патенту: 110731
Опубліковано: 10.02.2016
Автори: Кушнір Маргарита Володимирівна, Карташов Володимир Михайлович, Бабкін Станіслав Іванович
МПК: G01S 13/95
Мітки: спосіб, дистанційного, атмосфери, горизонтально, радіоакустичним, вимірювання, швидкості, зондуванням, вітру
Формула / Реферат:
Спосіб дистанційного вимірювання горизонтальної швидкості вітру радіоакустичним зондуванням атмосфери, який полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом, вимірюють...
Спосіб дистанційного вимірювання вертикальної швидкості вітру радіоакустичним зондуванням атмосфери
Номер патенту: 110446
Опубліковано: 25.12.2015
Автори: Толстих Єлизавета Геннадіївна, Бабкін Станіслав Іванович, Карташов Володимир Михайлович
МПК: G01S 13/95
Мітки: вертикальної, дистанційного, зондуванням, атмосфери, радіоакустичним, вимірювання, вітру, швидкості, спосіб
Формула / Реферат:
Спосіб дистанційного вимірювання вертикальної швидкості вітру радіоакустичним зондуванням атмосфери, який полягає у тому, що випромінюють вертикально угору акустичний пакет з синусоїдальним заповненням, опромінюють акустичний пакет електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного пакета, приймають електромагнітні коливання, розсіяні акустичним пакетом, послідовно перемножують...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46524
Опубліковано: 15.05.2002
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/95, G01S 13/00
Мітки: змін, допомогою, спосіб, вимірювання, відносних, дистанційного, повітря, акустичного, атмосфери, зондування, температури
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань повітря, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних...
Попередній патент: Установка для термообробки м’ясних виробів в оболонці
Наступний патент: Спосіб визначення наявності ендотеліальної дисфункції при неалкогольній жировій хворобі печінки
Випадковий патент: Коток сільськогосподарський