Бортова рлс для виявлення підземного об’єкту та вимірювання глибини його залягання
Номер патенту: 15170
Опубліковано: 30.06.1997
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
Формула / Реферат
Бортовая РЛС для обнаружения подземного объекта и измерения глубины его залегания, содержащая приемопередающую антенну, связанную с антенным переключателем, который связан с приемником и передатчиком периодических несинусоидальных импульсных сигналов, отличающаяся тем, что в нее введены первое и второе устройства связи, усилитель видеоимпульсов, линия задержки, связанная с выходом второго и входом первого устройств связи, измеритель длительности импульсов и вычислитель глубины залегания подземного объекта, причем выход приемника через первое устройство связи связан со входом усилителя, выход которого через второе устройство связи соединен со входом измерителя длительности импульсов, выход которого соединен с вычислителем глубины залегания подземного объекта.
Текст
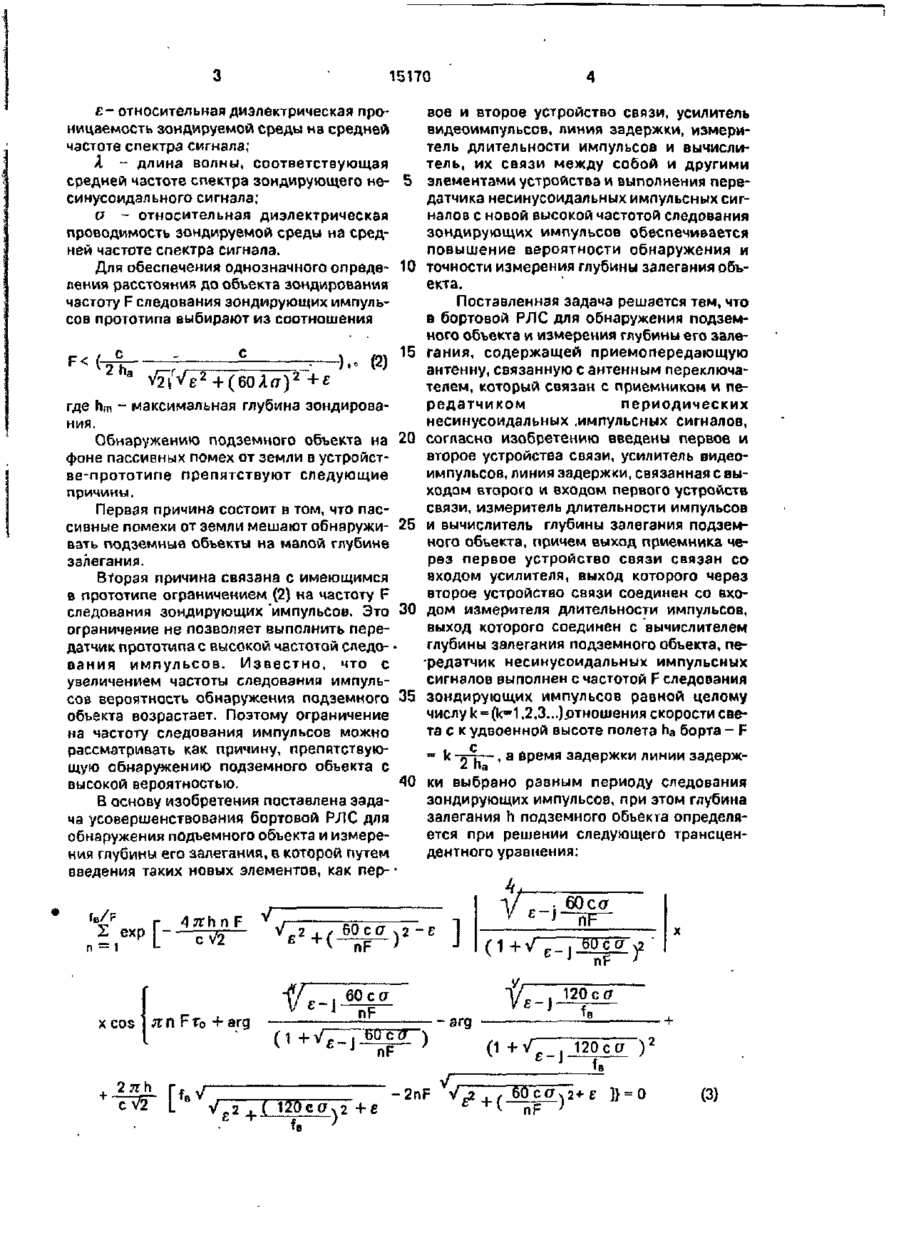
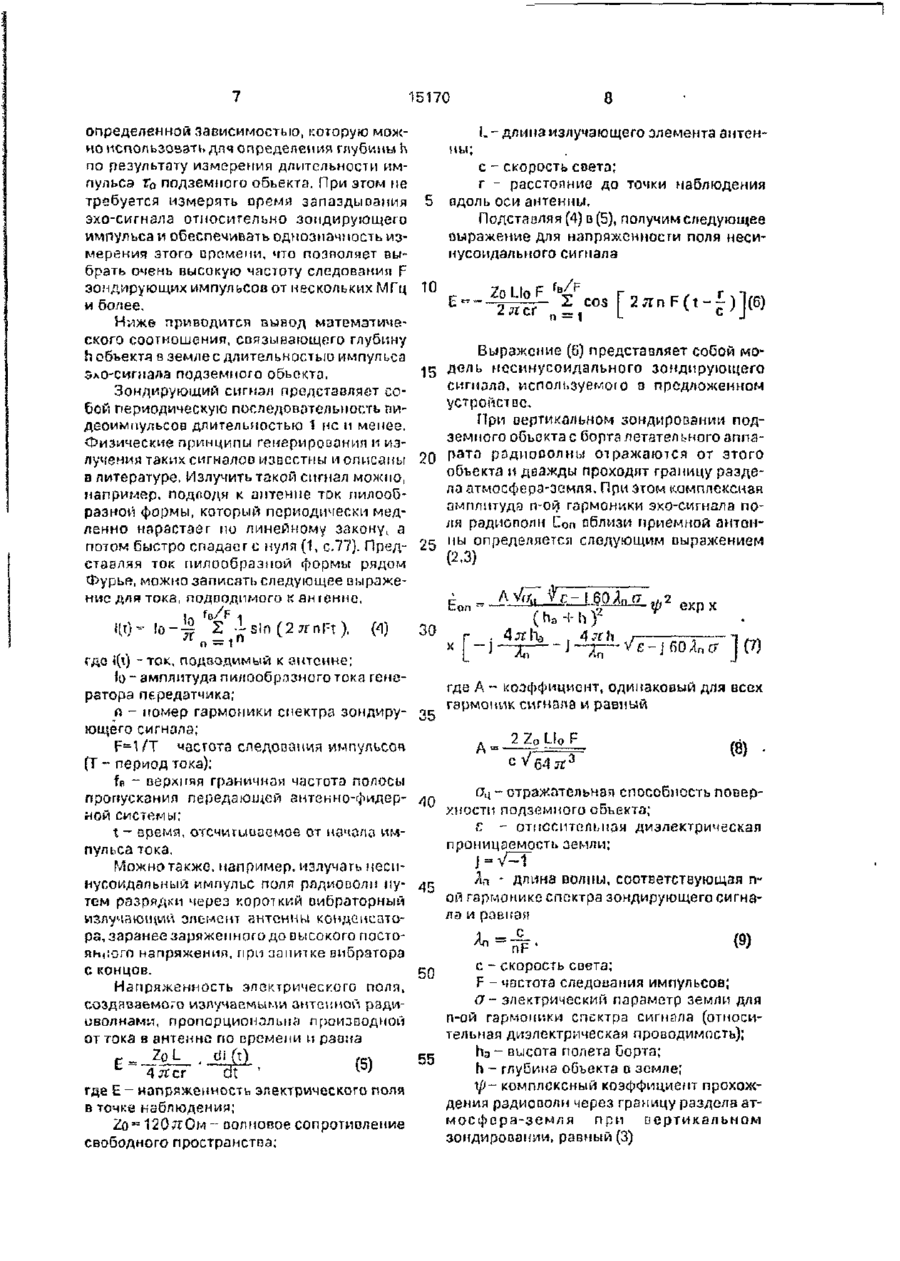
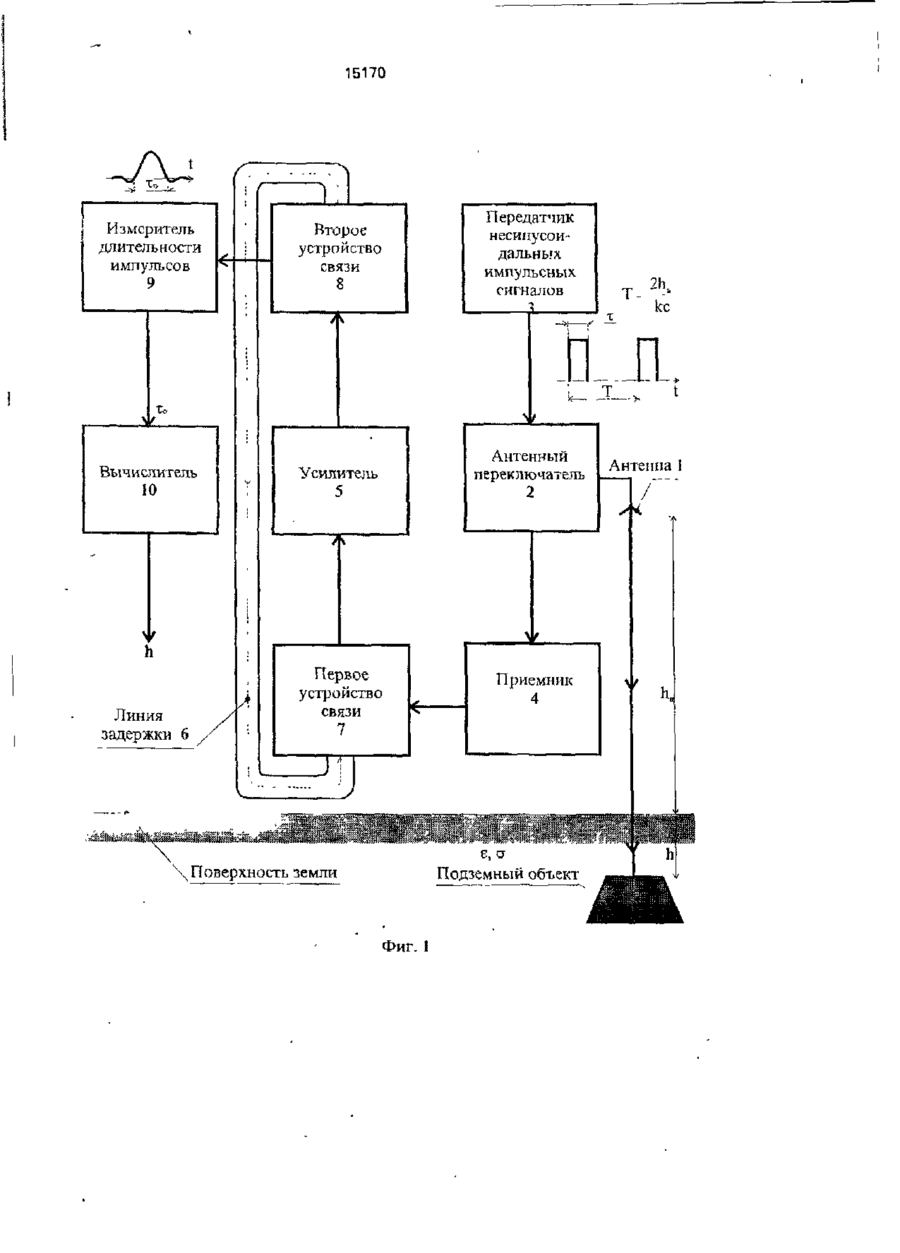
УКРАЇНА (19) U А о» (5і)5 G01 S 15170 (ІЗ) 17/06 ОПИС ДО ПАТЕНТУ ДЕРЖАВНЕ ПАТЕНТНЕ ВІДОМСТВО НА ВИНАХІД без проведення експертизи по суті на підставі Постанови Верховної Ради України Г* 3769-ХП від 23 XII 1993 р. Публікується в редакцП заявника (54) 50РТ0ВАРЛСДЛЯ ВИЯВЛЕННЯ ПІДЗЕМНОГО ОБ'ЄКТУ ТА ВИМІРЮВАННЯ ГЛИБИНИ ЙОГО ЗАЛЯГАННЯ 1 (21)95041645 (22)11.04.95 (24)30.06 97 (46) 30.06.97. Бюл. № З (56) Хармут Х.В. Несинусоидальные волны в радиолокации и радиосвязи. Пер. с англ. М., Радио и связь, 1985, с.42, 43, рис. 1,6,9. (72) Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович (73) Київський університет їм.Тараса Шевченка (U А) (57) Бортовая РЛС для обнаружения подземного объекта и измерения глубины его залегания, содержащая приемопередающую антенну, связанную с антенным переключаИзобретение относится к области радиолокации и может быть использовано для обнаружения подземных объектов и измерения глубины залегания их в земле с борта летательного аппарата. В качестве прототипа выбран бортовой радиолокатор без несущей частоты, установленный на вертолете береговой охраны США для проведения ледовой разведки. Прототип содержит приемопередающую бортовую антенну с антенным переключателем, передатчик несинусоидальных импульсных сигналов в виде периодической последовательности видеоимпульсов наносе кундной длительности без несущей частоты и приемник для приема таких сигналов, отраженных от подземных объектов. Антенный переключатель прототипа подключает антенну к передатчику на время передачи зондирующего импульса и к приемнику в телем, который связан с приемником и передатчиком периодических несинусоидальных импульсных сигналов, о т л и ч а ю щ а яся тем, что в нее введены первое и второе устройства связи, усилитель видеоимпульсов, линия задержки, связанная с выходом второго и входом первого устройств связи, измеритель длительности импульсов и ЙЫчислитель глубины залегания подземного объекта, причем выход приемника через первое устройство связи связан со входом усилителя, выход которого через второе устройство связи соединен со входом измерителя длительности импульсов, выход которого соединен с вычислителем глубины залегания подземного объекта. другое время. Бортовая антенна прототипа направлена вертикально вниз, то есть используется вертикальное зондирование как наиболее энергетически выгодный режим зондирования. В таком радиолокаторе при обнаружении подземного объекта измеряют время запаздывания гз эхо-сигнала этого объекта относительно зондирующего импульса, а глубину h залегания объекта определяют по формуле (1) где с - скорость света; h a - высота полета борта; С > ел VI О 15170 в- относительная диэлектрическая провое и второе устройство связи, усилитель ницаемость зондируемой среды на средней видеоимпульсов, линия задержки, измеричастоте спектра сигнала; тель длительности импульсов и вычислиА - длина волны, соответствующая тель, их связи между собой и другими средней частоте спектра зондирующего неэлементами устройства и выполнения пересинусоидального сигнала; датчика несинусоидальных импульсных сиго - относительная диэлектрическая налов с новой высокой частотой следования проводимость зондируемой среды на средзондирующих импульсов обеспечивается ней частоте спектра сигнала. повышение вероятности обнаружения и Для обеспечения однозначного опреде- 10 точности измерения глубины залегания объления расстояния до объекта зондирования екта. частоту F следования зондирующих импульПоставленная задача решается тем, что сов прототипа выбирают из соотношения в бортовой РЛС для обнаружения подземного объекта и измерения глубины его зале15 гания, содержащей приемопередающую ° ).* (2) антенну, связанную с антенным переключателем, который связан с приемником и передатчиком периодических где h m - максимальная глубина зондированесинусоидальных импульсных сигналов, ния. Обнаружению подземного объекта на 20 согласно изобретению введены первое и второе устройства связи, усилитель видеофоне пассивных помех от земли в устройстимпульсов, линия задержки, связанная с выве-прототипе препятствуют следующие ходом второго и входом первого устройств причины. связи, измеритель длительности импульсов Первая причина состоит в том, что пассивные помехи от земли мешают обнаружи- 25 и вычислитель глубины залегания подземного объекта, причем выход приемника чевать подземные объекты на малой глубине рез первое устройство связи связан со залегания. входом усилителя, выход которого через Вторая причина связана с имеющимся второе устройство связи соединен со вхов прототипе ограничением (2) на частоту F следования зондирующих импульсов. Это 30 дом измерителя длительности импульсов, выход которого соединен с вычислителем ограничение не позволяет выполнить переглубины залегания подземного объекта, педатчик прототипа с высокой частотой следо-. редатчик несинусоидальных импульсных вания импульсов. Известно, что с сигналов выполнен с частотой F следования увеличением частоты следования импульсов вероятность обнаружения подземного 35 зондирующих импульсов равной целому числу к = (к=1,2,3...)_отношения скорости свеобъекта возрастает. Поэтому ограничение та с к удвоенной высоте полета ha борта - F на частоту следования импульсов можно рассматривать как причину, препятствую" . n с і а время задержки линии задерж* u щую обнаружению подземного объекта с £. Па высокой вероятностью. 40 ки выбрано равным периоду следования В основу изобретения поставлена задазондирующих импульсов, при этом глубина ча усовершенствования бортовой РЛС для залегания h подземного объекта определяобнаружения подъемного объекта и измереется при решении следующего трансценний глубины его залегания, в которой путем дентного уравнения; введения таких новых элементов, как пер- * fe/F АЖh n F • с V2 2 ехр п =1 L X COS Fr0 +arg , бОсст nF J 60 Cg Ч 2 ~Е 1 (1 +V . C J b"UC a nF f у— 60cff nF lt (1 + е J ^ГТ'ьиса v n F -2nF -arg (1+V, nF J fB о (3) 15170 где fB - верхняя граничная частота полосы пропускания приемника; F - частота следования импульсов; п - номер гармоники спектра несинусоидального зондирующего сигнала; h - глубина залегания объекта в земле; с - скорость света; е- относительная диэлектрическая проницаемость земли; а-относительная диэлектрическая про.водимость земли на соответствующей частоте спектра сигнала; Го -длительность импульса эхо-сигнала подземного объекта. При этом полагается, что электрические параметры земли є , а в диапазоне спектра зондирующего сигнала известны или заранее измерены. Введение новых элементов: первого и второго устройства связи, усилителя видеоимпульсов, линии задержки, измерителя длительности импульсов и вычислителя глубины залегания подземного объекта в указанной связи их между собой и другими элементами бортовой РЛС, выбор передатчика с частотой следования зондирующих импульсов равной F = к » . 10 15 20 25 позволяют подавлять пассивные помехи от земли и усилить эхо-сигналы подземного объекта и в связи с этим повышается точность измерения глубины залегания этого объекта. Техническая сущность и принцип действия предложенного устройства поясняются графическими материалами, изображенными на фиг. 1,2. На фиг. 1 представлена упрощенная структурная схема предлагаемой бортовой РЛС обнаружения подземного объекта и измерения глубины его залегания, а также условно показаны подземный объект, поверхность земли и упрощенные эпюры импульсов зондирующего сигнала и эхо-сигнала подземного объекта. На фиг. 2 представлены зависимости длительности импульса Го эхо-сигнала подземного объекта от глубины h залегания объекта в земле при различных значениях частоты следования импульсов F, рассчитанные с помощью уравнения (3). В состав предложенного устройства (фиг.1) входят следующие элементы: приемопередающая бортовая антенна 1, направленная вертикально вниз и связанная с антенным переключателем 2, который подключает антенну к приемнику на время приема сигналов и к передатчику (закорачивает вход приемника) во время передачи зондирующего импульса передатчик 3 несинусоидальных импульсных сигналов в виде 30 35 40 45 50 55 периодической последовательности с частотой следования F - kc/2h a коротких однополярных видеоимпульсов наносекундной длительности без несущей частоты, приемник 4, усилитель 5 принятых видеоимпульсов эхо-сигналов; линия задержки 6 с временем задержки, равным периоду следования зондирующих импульсов Т =2ha/kct в виде отрезка коаксиального кабеля, вход которой связан через второе устройство связи 8 с выходом усилителя 5, а выход этой линии связан через первое устройство связи 7 со входом усилителя 5; измеритель 9 длительности импульса То принятого эхо-сигнала и вычислитель 10, вычисляющий глубину h залегания объекта в земле по измеренной длительности импульса г 0 путем решения трансцендентного уравнения (3). Антенна 1 связана с антенным переключателем 2, который связан с приемником 4 и передатчиком 3. Выход приемника связан с первым входом первого устройства связи 7, второй вход которого связан с выходом линии задержки 6, вход которой связан с первым выходом второго устройства связи 8. Выход первого устройства связи связан со входом усилителя 5, выход которого связан со вторым устройством связи, второй выход которого связан с измерителем длительности импульсов 9, а выход этого измерителя связан с вычислителем 10 глубины залегания подземного объекта. Физическая сущность и принцип действия предложенного устройства поясняются следующим. Используемый несинусоидальный импульсный зондирующий сигнал в виде периодической последовательности видеоимпульсов одинаковой полярности и очень короткой длительности (менее 1 не) без несущей частоты имеет очень широкий спектр во всем микроволновом диапазоне. При распространении радиоволн в земле высокочастотные составляющие спектра сигнала будут ослабляться сильнее, чем низкочастотные составляющие, так как поглощение радиоволн и проводимость почвы возрастает при увеличении частоты. Известно, что подавление высокочастотных составляющих спектра импульсного несинусоидального сигнала приводит к увеличению длительности импульса. При этом, чем глубже объект находится в земле, тем шире будет импульс отраженного эхо-сигнала. Это свойство несинусоидальных импульсных сигналов использовано в предложенном устройстве. Ширина импульса эхо-сигнала подземного объекта связана с глубиной объекта в земле 15170 определенной зависимостью, которую можно использовать для определения глубины h по результату измерения длительности импульса То подземного обьекта. При этом не требуется измерять время запаздывания эхо-сигнала относительно зондирующего импульса и обеспечивать однозначность измерения этого времени, что позволяет выбрать очень высокую частоту следования F зондирующих импульсов от нескольких МГц и бо/see. НЇІЖЄ приводится вывод математического соотношения, связывающего глубину U обьектя в земле с длительностью импульса ЗлО-сигпала подземного обьекта, Зондирующий сигнал представляет собой периодическую последовательность видеоимпульсов длительностью 1 нем менее. Физические принципы генерирования и излучения таких сигналов известны и описаны в литературе. Излучить такой сигнал можно, например, подводя к антенне ток пилообразной формы, который периодически медленно нарастает по линейному закону, а потом быстро спадает с нуля (1, с.77). Представляя ток пилообразной формы рядом Фурье, можно записать следующее выражение для тока, подводимого к аніонне. • *і _ lo f B I. - длина излучающего элемента антенмы; 5 10 с - скорость света; г - расстояние до точки наблюдения одаль оси антенны. Подставляя (4) в (5), получим следующее выражение для напряженности поля несинусоидального сигнала F f~ = Выражение (6) представляет собой мо15 доль месинусоидального зондирующего 15 сигнала, используемою в предложенном устройстве. При вертикальном зондировании подземного обьекта с борта летательного апла2Q рата радиоволны отражаются от этого объекта и дважды проходит границу раздело атмосферз-земпя. При этом комплексная амплитуда п-ой гармоники эхо-сигнала поля радиополн L o вблизи приемной антенTn 2^ пы определяется следующим выражением " (2,3) vP 1 гдо *М ~ ток, подводимый к антенне; )о-амплитуда пилообразного тока генератора передатчика; п - помер гармоники спектра зондирующего сигнала; F-1/T частота следования импульсоп (Т - период тока); fn - верхняя граничная частота полосы пропускания передающей антенно-фидерной системы; t - время, отсчитываемое от начала импульса тока. Можно также, например, излучать несинусоидальный импульс поля рядиоволи нутем разрядки через короткий вибраторный излучающий элемент антенны конденсатора, заранее заряженного до высокого постоянного напряжения, при аанитке вибратора с концов. Напряженность электрического поля, создаваемого излучаемыми антенной радиоволнами, пропорциональна производной от тока в антенне по вр по времени и равна i Йill m at где E - напряженность электрического поля в точке наблюдения; Zo^ 120 л О м - волновое сопротивление свободного пространства; 35 где А • кооффицисит, одинаковый для всех гармоник сигнала и равный А 2 Zo L!o F (8) ^Q а1} - отражательная способность поверхности подземного объекта; с - относительная диэлектрическая проницаемость земли; 45 An - длина волны, соответствующая пой гармонике спектра зондирующего сигнала и ровная Ап-^р. 50 55 (9) с - скорость света; F - частота следования импульсов; (7- электрический параметр земли для п-ой гармоники спектра сигнала (относительная диэлектрическая проводимость); h a - высота полета борта; h - глубина обьекта о земле; tp- комплексный коэффициент прохождения радиоволн через границу раздела атмосфера-земля при вертикальном зондировании, равный (3) 15170 каждой комплексной гармоники с учетом указанного выбора частоты следования импульсов и суммируя все гармоники, получим следующее выражение для напряженности поля несинусоидального импульсного эхосигнала вблизи приемной антенны РЛС (10) Умножая выражение (7) на множитель е J2 п nFt , вычисляя вещественную часть 4JThn F V arg nF 10 VI-160 V nF (ID В формуле (11) отсчет времени t ведется быстро рассчитать в очень узком интервале от середины импульса зондирующего сигнаизмерения временигот0доГо/2. При такой ла, при этом учтено изменение полярности записи формулы (11) отсчет времени ведется импульса на противоположную при отраже- 5 от середины импульса эхо-сигнала и при t нии от подземного объекта. =Го/2 напряжение эхо-сигнала будет равно Расчеты по формуле (11) показали, что нулю, что соответствует моменту конца время запаздывания t a импульса эхо-сигнаглавного лепестка импульса и началу первола относительно зондирующего импульса го бокового лепестка импульса несинусоиможно приближенно определить по форму- 10 дального эхо-сигнала от подземного ле объекта. Подставляя в модифицированную формулу (11) вместо t величину Го/2 и приравнивая напряженность поля эхо-сигнала нулю, 15 получим трансцендентное уравнение (3), связывающее неизвестную глубину h зале(12) гания подземного объекта с измеренным значением Го длительности импульса эхосигнала. Уравнение (3) рекомендуется исгде электрические параметры земли є, стбе- 20 пользовать для определения глубины h рутся для средней частоты спектра зондирузалегания объекта в земле по результату ющего сигнала, равной f B /2. измерения длительности Го импульса эхоРасчеты формы импульса эхо-сигнала сигнала подземного обьекта. по формуле (11) не удобны, так как время t Уравнение (3) имеет единственное реприхода импульса не известно, а расчеты в 25 шение. Это можно видеть из анализа кришироком временном интервале требуют вых на фиг. 2. Расчеты зависимостей больших затрат машинного времени. Поэтопроведены для трех значений частоты слему целесообразно отсчет времени t вести от дования импульсов F для суглинистой почвы середины импульса эхо-сигнала и принять влажностью 2,2%, а значения электричефазу гармоники эхо-сигнапа на средней ча- 30 ских параметров земли во всем микроволстоте спектра f o /2 равной нулю- При этом новом диапазоне брались на основе вид формулы (11) изменится и аргумент коэкспериментальных данных, известных для синуса в фигурных скобках будет таким же, этого типа почв. При этом полагалось, что как в формуле (3), если в последней замеверхняя граничная частота полосы пропунить г 0 на 2t. В этом случае форму импульса 35 екания приемника РЛС была f = 1 ГГц. АнаB эхо-сигнала от подземного объекта можно 11 15170 12 Таким образом, предложенный способ может быть практически реализован, а указанные выше отличительные признаки яолпются существенными и принципиально необходимы для реализации этого устройства, Элементы структурной схемы предложенного устройства на фиг. 2 выполнены следующим образом. Антенна 1 с антенным переключателем 2, передатчик 3 и приемник 4 выполнены для передачи и приема наносекундиых видеоимпульсов. Физические основы и принципы построения таких элементов известны к описаны о литерзтуре [1]. Антенный переключатель 2 переключает приемопередающую антенну 1 к передатчику 3 на время передачи зондирующего импульса и закорачивает вход приемника 4 на это время. Принципы построения сверхширокополосного усилителя видеоимпульсов 5 с кольцом обратной соязи в оиде линии задержки б с устройством связи 7, 8 известны и описаны и литературе. Периос устройство соязи 7 имеет один выход, связанный со сходом усилителя 5, и дол выхода, один из которых связан с выходом приемника 4, а другой - с выходом линии задержки 6. Второе устройство связи 0 имеет один аход, связанный с оыхолом усилителя 5, и два выхода, один из которых связан со входом линии задержки б, а другой - со входом измерителя длительности импульса эхо-сишала 9, выход которого связан с вычислителем 10 глубины залегания подземного объекта. Линия задержки G, время задержки которой РЭЙНО периоду Т~1 /F следования зонди ру ю щи х импульсов, может бить выполнена D виде отрезка коаксиального кабеля или полосковой линии. Измеритель длительности наносекундмых импульсов 9 может быть выполнен на основе известных измерительных средстп, освоенных отечественной прамышлеиностью. Вычислитель 10 представляет собой обычную микроЭЕМ, используемую для решения трансцендентного уравнения (3). Эти расчеты могут быть выполнены почти и реальном масштабе времени, так как интерТакое техническое решение позволяет накопить слабый эхо-сигнал от подземного 50 вол поиска корня уравнения (3) сравнительно мал, а частота следования имобъекта и выделить его па фоне собственпульсов Г: велика и количество суммируеных шумов приемника. Высокая частота слемых гармоник п сумме уравнения (3) будет довзнил импульсоо F, используемая в сравнительно tie велико. предложенном устройстве, способствует 55 Таким образом, принципы построения быстрому накоплению эхо-сигнала и обесэлементной базы предложенного устройстпечивает приемные (сравнительно небольва известны и производство этих элементов шие) размеры линии задержки 6, которая может быть освоено отечественной проможет быть выполнена в виде отрезка коакмышленностью. кабеля. логичные расчеты, проведенные также для других реальных типов почвы, показали, что длительность импульса т0 эхо-сигнала подземного объекта для почти всех реальных типов почвы существенно зависит от глуби- 5 ны h объекта в земле и увеличивается в несколько раз по сравнению с длительностью импульса зондирующего сигнала на глубине до 15 м. Такие значительные изменения длительности импульса эхо-сигнала могут быть 10 измерены с помощью иэоестмых измерительных средств современной радиозлектоаникм, что свидетельствует о возможности определении глубины h объекта о земле с помощью предложенного устройства по 15 длительности импульса г о эхо-сигмала без измерения оремеми запаздывания этого сигнала. В предложенном устройстве частоту следования зондирующих импульсов выби- 20 рают равной целому числу отношения скоросги осета к удвоенной высоте полета (•орта F = kc/2ha. Такое техническое реше» ние позволяет эффективно подавлять обратные помеховые отражения зондирующих 25 сигналов от зомной поверхности, так как при этом время прихода отраженного от земли импульса к антенне РЛ С будет совпадать со временем излучения очередного зондирующего импульса, когда приемник 30 отключен от антенны и вход его закорочен. В результате, обратные помехооыо отражения от земной поверхности не будут приниматься приемником и не будут мешать 35 работе РЛС. Усилитель видеоимпульсов 5 и линия задержки 6 с первым и вторым устройствами связи 7,8, связывающим эту линию со входом и выходом этого усилителя, необходима для накопления от импульса к импульсу 40 и усилений эхо-сигнала от подземного объекта, при этом собстоекные шумы приемника накапливаться и усиливаться не будут, так как эти шумы имеют непериодическую структуру, а используемая схема нэкаплпвз- АЪ ет только периодический эхо-сигпэл с периодом Т= 1/F. 13 15170 Динамика работы предложенного устосуществляется следующим образом. Передатчик 3 генерирует нссиьусоидальный сверхширокополосной г^риодический сигнал, который через ан- 5 тенш й переключатель 2 подводится к антечье 1, которая излучает периодическую последовательность наносекундных видеоимпульсов одинаковой полярности и почти прямоугольной формы с частотой следова- 10 ний F -= kc/2ha вертикально вниз в направ• л^ьч
ДивитисяДодаткова інформація
Назва патенту англійськоюAirborne radar station for r4eveal of underground object and measurement of depth of its position
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Rodin Oleksandr Valeriiovych
Назва патенту російськоюБортовая рлс для выявления подземного объекта и измерения глубины его залегания
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Родин Александр Валериевич
МПК / Мітки
МПК: G01S 17/06
Мітки: виявлення, бортова, рлс, вимірювання, глибини, об'єкту, залягання, підземного
Код посилання
<a href="https://ua.patents.su/10-15170-bortova-rls-dlya-viyavlennya-pidzemnogo-obehktu-ta-vimiryuvannya-glibini-jjogo-zalyagannya.html" target="_blank" rel="follow" title="База патентів України">Бортова рлс для виявлення підземного об’єкту та вимірювання глибини його залягання</a>
Спосіб виявлення підземних об’єктів з борту літального апарату на фоні пасивних перешкод від земної поверхні
Номер патенту: 15946
Опубліковано: 30.06.1997
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: земної, підземних, об'єктів, виявлення, перешкод, борту, поверхні, фоні, спосіб, апарату, пасивних, літального
Формула / Реферат:
Способ обнаружения подземных объектов с борта летательного аппарата на фоне пассивных помех от земной поверхности, заключающийся в излучении вертикально вниз с борта летательного аппарата несинусоидальных импульсных зондирующих сигналов наносекундной длительности, и приеме и индикации эхо-сигналов от подземных объектов, отличающийся тем, что излучают периодическую последовательность пары разнополярных видеоимпульсов, а которой второй...
Бортовий секвентний радіолокатор виявлення об’єктів поблизу земної поверхні
Номер патенту: 17471
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: виявлення, радіолокатор, об'єктів, земної, секвентний, бортовий, поблизу, поверхні
Формула / Реферат:
Бортовой секвентный радиолокатор обнаружения объектов вблизи земной поверхности, содержащий приемо-передающую антенну с антенным переключателем, приемник и передатчик несинусоидальных сигналов в виде периодических прямоугольных видеоимпульсов наносекундной длительности с высокой частотой следования импульсов отличающийся тем, что на выходе приемника установлен полосовой фильтр с полосой пропускания от нижней частоты равной до верхней...
Радіолокаційний імпульсний дальномір

Номер патенту: 17451
Опубліковано: 06.05.1997
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: імпульсний, радіолокаційний, дальномір
Формула / Реферат:
Радиолокационный импульсный дальномер, содержащий передатчик импульсных зондирующих сигналов с периодом следования T1 > 2rm/c, приемо-передающую антенну с антенным переключателем, приемник, синхронизатор и индикатор, отличающийся тем, что антенна, приемник и передатчик выполнены для несинусоидальных импульсных сигналов наносекундной длительности t без несущей частоты в виде периодической пачки n таких импульсов с периодом T1 и периодом...
Спосіб вимірювання пікової напруги електричних імпульсів та пристрій для його реалізації
Номер патенту: 14790
Опубліковано: 18.02.1997
Автори: Соловйов Валентин Сергійович, Тимофеєв Євген Петрович, Балабан Василь Михайлович
МПК: G01R 19/04
Мітки: пристрій, вимірювання, імпульсів, спосіб, електричних, напруги, пікової, реалізації
Формула / Реферат:
1. Способ измерения пикового напряжения электрических импульсов, при котором один электрический импульс длительностью подают на вход диодно-емкостной запоминающей ячейки с постоянной цепи заряда и по величине напряжения на конденсаторе определяют пиковое напряжение электрического импульса отличающийся тем, что исходный электрический импульс преобразуют в два электрических импульса и такой же длительности и одинаковой амплитуды, равной...
Рлс виявлення малорозмірних цілей
Номер патенту: 17463
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: цілей, виявлення, рлс, малорозмірних
Формула / Реферат:
РЛС обнаружения малоразмерных целей, содержащая передатчик с передающей антенной, приемник и индикатор, отличающаяся тем, что передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, приемная антенна выполнена в виде вибраторной антенной решетки с уголковым рефлектором из двух проводящих плоскостей с углом раскрыва 60°, в которой удаление ближнего вибратора от ребра рефлектора втрое меньше...
Попередній патент: Пристрій фазової автопідстройки частоти
Наступний патент: Спосіб вимірювання глибини залягання об’єкту у землі
Випадковий патент: Протипожежні двері з дверною коробкою, що їх облямовує