Спосіб вимірювання глибини залягання об’єкту у землі
Номер патенту: 15171
Опубліковано: 30.06.1997
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Осипа Володимир Олександрович
Формула / Реферат
Способ измерения глубины залегания объекта в земле, заключающийся в излучении импульсного зондирующего сигнала и приеме отраженного от подземного объекта эхо-сигнала, отличающийся тем, что излучают несинусоидальный импульсный сигнал в виде периодической последовательности видеоимпульсов длительностью менее 1нс и по измеренной длительности импульса эхо-сигнала подземного объекта определяют глубину залегания объекта в земле путем решения следующего трансцендентного уравнения
где - глубина залегания объекта в земле;
- длительность импульса эхо-сигнала, отраженного от подземного объекта;
- частота следования импульсов,
- верхняя граничная частота полосы пропускания приемника сигнала;
- номер гармоники спектра зондирующего сигнала,
- скорость света,
- высота подъема антенны над землей,
- относительная диэлектрическая проницаемость земли;
- относительная диэлектрическая проводимость земли на соответствующей частоте спектра сигнала,
Текст
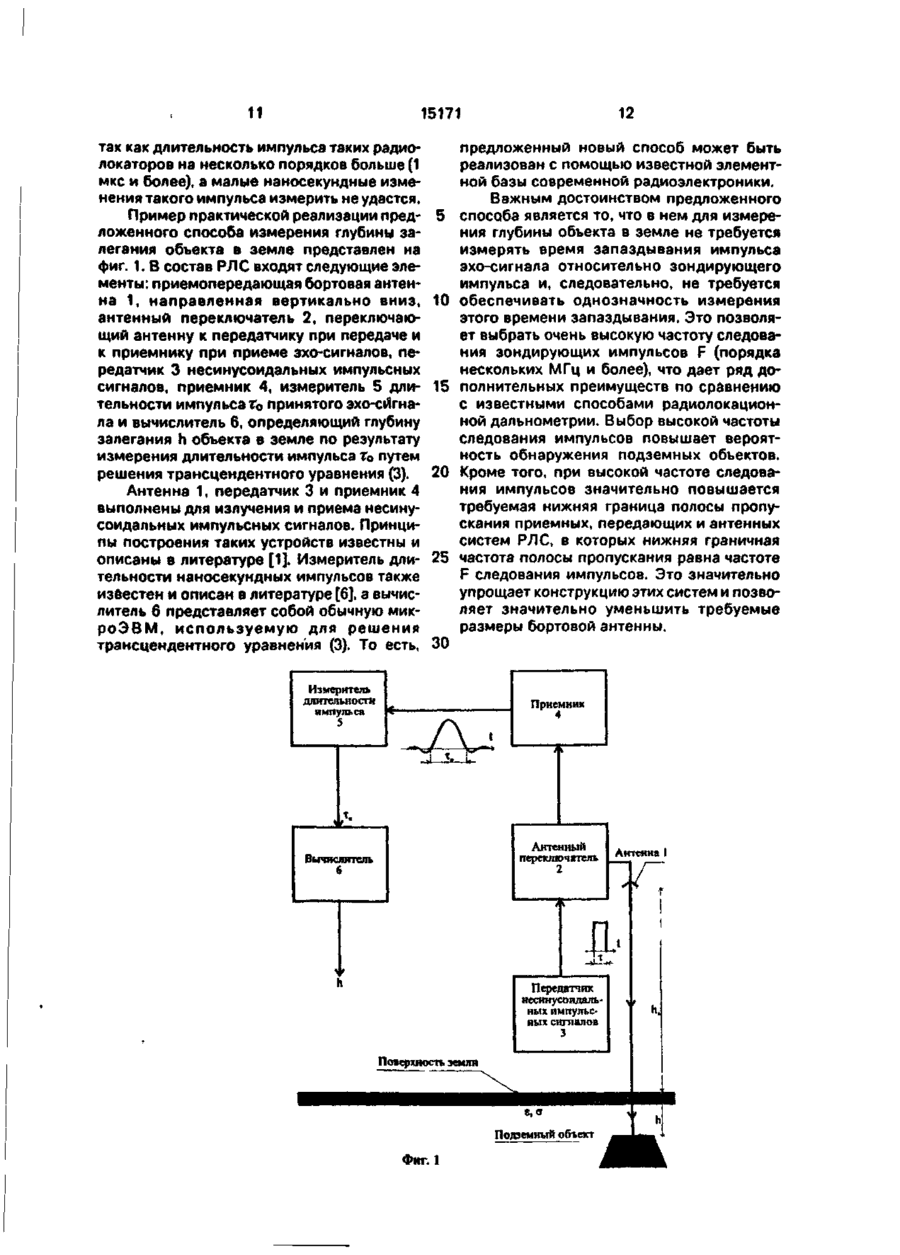
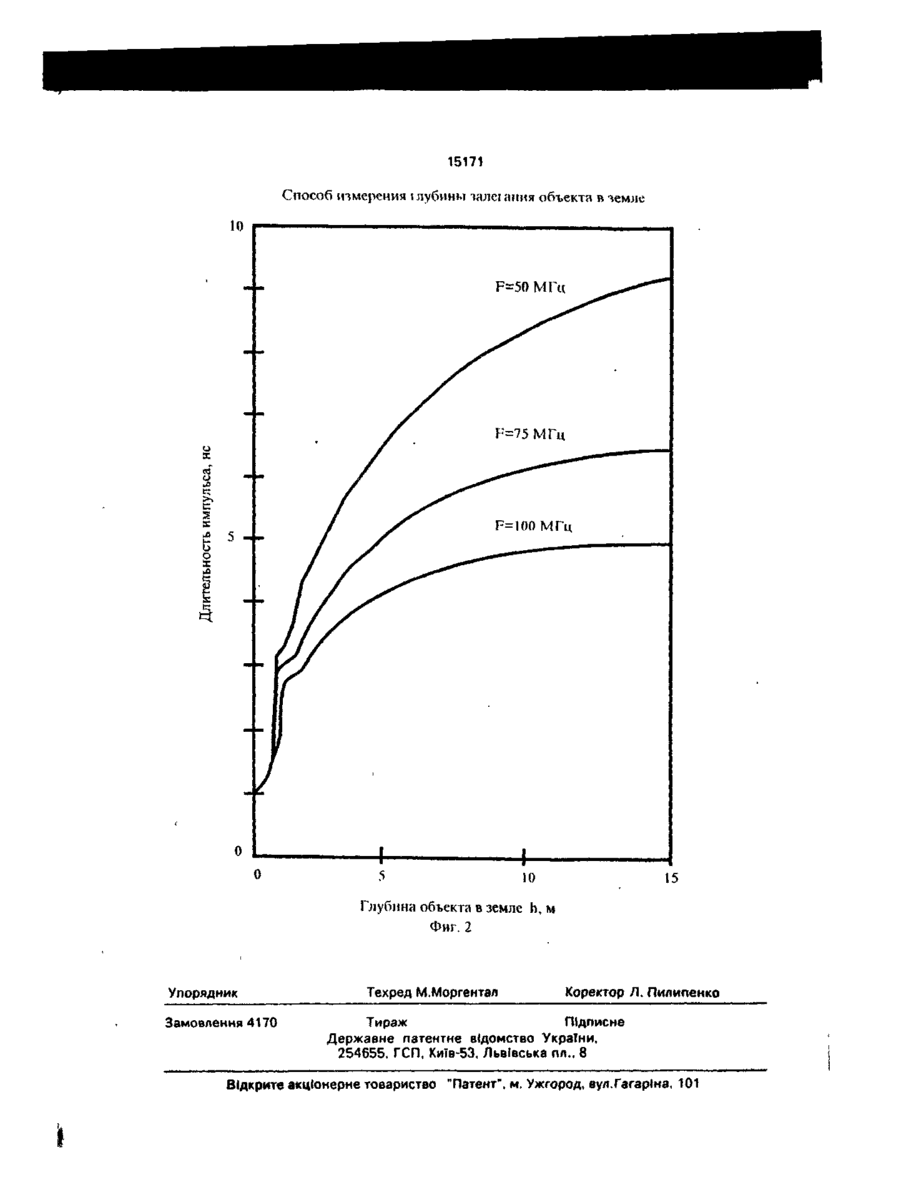
Способ измерения глубины залегания объекта в земле, заключающийся в излучении импульсного зондирующего сигнала и приеме отраженного от подземного объекта эхо-сигнала, о т л и ч а ю щ и й с я тем, что излучают несинусоидальный импульсный сигнал в виде периодической последовательности видеоимпульсов длительностью менее 1 нс и по измеренной длительности импульса Го эхо-сигнала подземного объекта определяют глубину залегания объекта в земле путем решения следующего трансцендентного уравнения С > СЛ -f-arg X COS 2л:п fBV v (1 +V r . (1 +V nF (12fQc7 + где h - глубина залегания объекта в земле; т о - длительность импульса эхо-сигнала, отраженного от подземного объекта; F - частота следования импульсов, 12бса J "2nF fB V^ , ^ 6 0 c q y -fg D = 0 nF f 8 - верхняя граничная частота полосы пропускания приемника сигнала; п - номер гармоники спектра зондирующего сигнала, с - скорость света, 15171 h a - высота подъема антенны над землей, £ - относительная диэлектрическая проницаемость земли; а-относительная диэлектрическая проводимость земли на соответствующей частоте спектра сигнала, j ределения глубины залегания объекта в Изобретение относится к области радиземле и разрешение по глубине будут очень олокации и может быть использовано для низкими. измерения глубины залегания подземных Вторая причина связана с тем, что в объектов с борта летательного аппарата в 5 бортовых РЛСлодповерхностного зондироспособе-прототипе требуется измерять вревания. мя запаздывания сигнала в земле и поэтому нельзя использовать высокую частоту слеВ качестве прототипа выбран радиоимдования зондирующих импульсов из-за возпульсный способ зондирования слоистых при такой частоте земных покровов. Способ заключается в 10 никающей неоднозначности определения глубины затом, что излучают вертикально вниз с борта легания объекта в земле. Известно, что при зондирующие сигналы в виде радиоимпульувеличении частоты следования зондируюсов на несущей частоте, принимают отращих импульсов возрастает вероятность обженные от подземного объекта эхо-сигналы и измеряют время запаздывания сигнала в 15 наружения подземного объекта. Поэтому земле. При этом глубину h объекта в земле имеющееся ограничение на частоту следоопределяют по формуле вания зондирующих импульсов в способепрототипе можно рассматривать как вторую причину, препятствующую обнаружению 20 подземного объекта. t3C (2) В основу изобретения поставлена задаVfc\T ча усовершенствования способа измерения глубины залегания объекта в земле, в котором благодаря излучению импульсного зонгде t3 - время запаздывания сигнала в зем25 дирующего сигнала в виде периодической ле; последовательности видеоимпульсов поля с - скорость света; радиоволн длительностью менее 1 не и опе - относительная диэлектрическая проределению по измеренной длительности Го ницаемость земли; импульса эхо-сигнала подземного объекта Я-длина волны, соответствующая несу30 глубины залегания этого объекта в земле щей частоте сигнала; обеспечиваются высокая точность опредеа - относительная диэлектрическая ления глубины и высокое разрешение по проводимость земли. глубине при высокой частоте следования Несущую частоту сигнала выбирают в зондирующих импульсов и приемлемых рэзмикроволновом диапазоне из условия возможности обеспечения требуемого энерге- 35 мерах устройства, реализующего данный тического потенциала бортовой РЛС. Эту способ. частоту нельзя брать очень высокой, так как высокие частоты сильно поглощаются в земПоставленная задача решается тем, что ле, что значительно уменьшает возможную в способе измерения глубины залегания глубину зондирования. 40 объекта в земле, заключающемся в излучении импульсного зондирующего сигнала и Практическое использование способаприеме отраженного от подземного объекта прототипа и определение глубины залегаэхо-сигнала, согласно изобретению излучания подземного объекта с требуемой ют несинусоидальный импульсный сигнал в точностью и высоким разрешением по глубине затруднено следующими причинами. 45 виде периодической последовательности видеоимпульсов поля радиоволн длительноПервая причина состоит в том, что при стью менее 1 нс и по измеренной длительприемлемой для зондирования несущей чаности То эхо-сигнала подземного объекта стоте сигнала длительность зондирующего определяют глубину залегания объекта в импульса и длина волны окажутся сравнительно большими. В результате точность оп- 50 земле путем решения следующего трансцендентного уравнения 15171 f./F nF C xcos arg J nF ' -arg ( 1 4-V c (1 + V g + е -2nF 120 e g у rл+ І Ґ 6 0 с а Ч 2 + с v nF ) + где fB - верхняя граничная частота полосы ляющая устройство реализации предложенпропускания приемника сигнала; ного способа, а также условно показаны приемопередающая антенна РЛС, подземF - частота следования импульсов; ный объект, поверхность земли и упрощенп - номер гармоники спектра зондируные эпюры импульсов зондирующего ющего сигнала; сигнала и эхо-сигнала подземного объекта. h - глубина залегания объекта в земле; На фиг. 2 представлены зависимости длис - скорость света; тельности импульса То эхо-сигнала подземha - высота подъема антенны над земного объекта от глубины h залегания объекта лей; е - относительная диэлектрическая про- 10 в земле при различных значениях частоты следования импульсов F, рассчитанные с ницаемость земли; помощью уравнения (3). о - относительная диэлектрическая проводимость земли на соответствующей Физическая сущность предложенного частоте спектра сигнала; способа измерения глубины залегания объ15 екта в земле поясняется следующим. Используемый несинусоидальный То ~ длительность импульса эхо-сигнала импульсный зондирующий сигнал в виде пеподземного объекта. риодической последовательности видеоимПри этом полагается, что электрические параметры земли є, а в диапазоне спектра 20 пульсов очень короткой длительности (менее 1 нс) без несущей частоты имеет зондирующего сигнала известны или зараочень широкий спектр во всем микроволнонее измерены. вом диапазоне. При распространении радиИзлучение несинусоидального импульоволн в земле высокочастотные сного сигнала в виде периодической послесоставляющие спектра сигналов будут осдовательности видеоимпульсов 25 лабляться сильнее, чем низкочастотные содлительностью менее 1 нс позволяет улучставляющие, так как поглощение радиоволн шить разрешение по глубине (разрешение и проводимость почвы возрастает при увепо глубине будет не более 0,3 м) и точность личении частоты. Известно, что подавление определения глубины залегания объекта в высокочастотных составляющих спектра земле. Определение этой глубины по измеимпульсного несинусоидального сигнала ренной длительности импульса г о эхо-сигприводит к увеличению длительности имнала подземного объекта позволяет не пульса. При этом, чем глубже объект нахоизмерять время запаздывания сигнала в дится в земле, тем шире будет импульс земле (как в прототипе), а это позволяет использовать высокую частоту следования 35 отраженного эхо-сигнала. Это свойство несинусоидального импульсного сигнала исзондирующих импульсов, что повышает вепользовано в предлагаемом способе. роятность обнаружения подземного объекШирина импульса эхо-сигнала подземного та и способствует повышению точности объекта связана с глубиной залегания этого определения глубины залегания этого объобъекта в земле определенной зависимоекта в земле. 40 стью, которую можно использовать для опНа фиг. 1 представлена упрощенная ределения глубины залегания h по структурная схема бортовой РЛС подповеррезультату измерения длительности имхностного зондирования земли, представ 15171 8 пульса То подземного объекта. При этом не сигнала, используемого в предлагаемом требуется измерять время запаздывания способе измерения глубины залегания объэхо-сигнала относительно зондирующего екта в земле. импульса. Ниже приводится вывод матемаПри вертикальном зондировании подтического соотношения, связывающего глу- 5 земного объекта с борта летательного аппабину h объекта в земле с длительностью рата радиоволны отражаются от этого импульса То эхо-сигнала подземного объекта. объекта и дважды проходят границу раздела Зондирующий сигнал представляет соатмосфера-земля. При этом комплексная амплитуда n-ой гармоники эхо-сигнала бой периодическую последовательность видеоимпульсов поля радиоволн 10 вблизи приемной антенны Eon определяется следующим выражением (3,4) длительностью 1 нс и менее. Представляя ток пилообразной формы рядом Фурье, можно записать следующее выражение для Ал£*ц~ Vg-f бОАпа ^2 тока, подводимого к антенне. -on (ha + h ) 2 15 f e/F l(t) = lo -£ 2 - sin(2jrnFt), 2 (4) n = 1" где l(t) - ток, подводимый к антенне; 20 lo~ амплитуда пилообразного тока генератора передатчика; fB - верхняя граничная частота полосы пропускания передающей антенно-фидер25 ной системы; F ~ 1 /Т - частота следования импульсов (Т - период тока); п - номер гармоники спектра тока; t - время, отсчитываемое от начала импульса тока. 30 Напряженность электрического поля, создаваемого излучаемыми антенной радиоволнами, пропорциональна производной от тока в антенне по времени и равна 35 ZoL dl(t) с _ (5) 3t ' 4 лег где Е - напряженность электрического поля в точке наблюдения. Zo • 120 л Ом - волновое сопротивление свободного пространства; L - длина излучающего элемента антенны; с - скорость света; г - расстояние до точки наблюдения вдоль оси антенны. Подставляя (4) в (5), получим следующее выражение для напряженности поля несинусоидального зондирующего сигнала РЯС, реализующей предложенный способ, ZQLIQF fB/F C 0 S Соотношение (6) представляет собой модель несинусоидального зондирующего Z (ha4-h) n=1c где А - коэффициент, одинаковый для всех гармоник сигнала и равный: 2 Zo LloF (8) Оц - отражательная способность поверхности подземного объекта; є - относительная диэлектрическая проницаемость земли для л-ой гармоники спектра сигнала; An - длина волны, соответствующая п-ой гармонике спектра зондирующего сигнала и равная Дп=£. (9) с - скорость света; F - частота следования импульсов; а- относительная диэлектрическая проводимость земли для п-ой гармоники спектра сигнала; ha - высота антенны над землей; h - глубина объекта в земле; tp- комплексный коэффициент прохождения радиоволн через границу раздела атмосфера-земля при вертикальном зондировании, равный (4) 2 п. (10) Умножая выражение (7) на множитель е , вычисляя вещественную часть каждой комплексной гармоники и суммируя все гармоники, получим следующее выражение для напряженности поля несинусоидального импульсного эхо-сигнала вблизи приемной антенны РЛС: 15171 cos / 2 7 r n F t 4jrhn F , ( 60ca ч 10 t3 (12) V 120 c 4л:ha n F (1 + V г- \ В формуле (11) отсчет времени t ведется от середины импульса зондирующего сигнала, при этом учтено изменение полярности импульса на противоположную при отражении от подземного объекта. Расчеты по формуле (11) показали, что время запаздывания ь импульса эхо-сигнала относительно зондирующего импульса можно приближенно определить по формуле x 10 15 где электрические параметры земли є, а берутся для средней частоты спектра зондирующего сигнала, равной f B /2. Расчеты формы импульса эхо-сигнала 20 по формуле (11) не удобны, так как время t прихода импульса не известно, а расчеты в широком временном интервале требуют больших затрат машинного времени. Поэтому целесообразно отсчет времени т вести от 25 середины импульса эхо-сигнала и принять фазу гармоники эхо-сигнала на средней частоте спектра f B /2 равной нулю. При этом вид формулы (11) изменится и аргумент косинуса в фигурных скобках будет таким же, 30 как в формуле (3), если в последней заменить Го на 2t. В этом случае форму импульса эхо-сигнала от подземного объекта можно быстро рассчитать в узком интервале измерения времени t от 0 до г о /2. При такой 35 записи формулы (11) отсчет времени ведется от середины импульса эхо-сигнала и при t То/2 напряжение эхо-сигнала будет равно нулю, что соответствует моменту конца главного лепестка импульса и началу перво- 40 го бокового лепестка импульса несинусоидального эхо-сигнала от подземного объекта. Подставляя в модифицированную формулу (11) вместо t величину Го/2 и приравни- 45 вая напряженность поля эхо-сигнала нулю, получим трансцендентное уравнение (3), 01) б 0 eg связывающее неизвестную глубину h залегания подземного объекта с измеренным значением Го длительности импульса эхосигнала подземного объекта. Уравнение (3) рекомендуется использовать для определения глубины h залегания объекта в земле по результату измерения длительности То импульса эхо-сигнала подземного объекта. Уравнение (3) имеет единственное решение. Это можно видеть из фиг. 2. Расчеты проведены для трех значений частоты следования импульсов F для суглинистой почвы влажностью 2,2%, а значения электрических параметров земли во всем микроволновом диапазоне брались на основе экспериментальных данных, известных для этого типа почв (5). При этом полагалось, что верхняя граничная частота полосы пропускания приемника РЛС была fe-ІГГц. Аналогичные расчеты, проведенные также для других реальных типов почвы, показали, что длительность импульса г о эхо-сигнала подземного объекта для почти всех реальных типов почвы существенно зависит от глубины h объекта в земле и увеличивается в несколько раз по сравнению с длительностью импульса зондирующего сигнала на глубине до 15 м. Такие значительные изменения длительности импульса эхо-сигнала могут быть измерены с помощью известных измерительных средств современной радиоэлектроники, что свидетельствует о возможности практической реализации предложенного способа. Для реализации предложенного способа принципиально необходимо использовать несинусоидальный зондирующий сигнал с очень малой длительностью импульса (менее 1 не), так как при импульсах большей длительности разрешение по глубине будет более 0,3 м, что зачастую является недостаточным для практического использования способа. Традиционные радиолокаторы с синусоидальным сигналом в виде радиоимпульсов на несущей частоте не пригодны для реализации этого способа, 11 12 15171 так как длительность импульса таких радиолокаторов на несколько порядков больше (1 мкс и более), а малые наносекундные изменения такого импульса измерить не удастся. Пример практической реализации пред- 5 ложенного способа измерения глубины залегания объекта в земле представлен на фиг. 1. В состав РЛС входят следующие элементы: приемопередающая бортовая антенна 1, направленная вертикально вниз, 10 антенный переключатель 2, переключающий антенну к передатчику при передаче и к приемнику при приеме эхо-сигналов, передатчик 3 несинусоидальных импульсных сигналов, приемник 4, измеритель 5 дли- 15 тельности импульса Го принятого эхо-сйгнала и вычислитель 6, определяющий глубину залегания h объекта в земле по результату измерения длительности импульса То путем решения трансцендентного уравнения (3). 20 Антенна 1, передатчик 3 и приемник 4 выполнены для излучения и приема несинусоидальных импульсных сигналов. Принципы построения таких устройств известны и описаны в литературе [1]. Измеритель дли- 25 тельности наносекундных импульсов также известен и описан в литературе [6], а вычислитель 6 представляет собой обычную микр о Э В М , используемую для решения трансцендентного уравнения (3). То есть, 30 предложенный новый способ может быть реализован с помощью известной элементной базы современной радиоэлектроники. Важным достоинством предложенного способа является то, что в нем для измерения глубины объекта в земле не требуется измерять время запаздывания импульса эхо-сигнала относительно зондирующего импульса и, следовательно, не требуется обеспечивать однозначность измерения этого времени запаздывания. Это позволяет выбрать очень высокую частоту следования зондирующих импульсов F (порядка нескольких МГц и более), что дает ряд дополнительных преимуществ по сравнению с известными способами радиолокационной дальнометрии. Выбор высокой частоты следования импульсов повышает вероятность обнаружения подземных объектов. Кроме того, при высокой частоте следования импульсов значительно повышается требуемая нижняя граница полосы пропускания приемных, передающих и антенных систем РЛС, в которых нижняя граничная частота полосы пропускания равна частоте F следования импульсов. Это значительно упрощает конструкцию этих систем и позволяет значительно уменьшить требуемые размеры бортовой антенны. Измеритель длительности импульса 5 Приемник Антенный переключатель 2 Вычислитель 6 Передатчик несинусоидаль ных импульсных сигналов 3 Поверхность земли Є.О Подземный объект Фнг. 1 Антенна I 15171 Способ измерения ілубинм іалсіішия объекта в чемле 10 F=50MFn 5 10 15 "лубина объекта в земле h, м Фиг. 2 Упорядник Замовлення 4170 Техред М.Моргентал Коректор / І . Пилипенко Тираж Підписне Державне патентне відомство України, 254655. ГСП, Київ-53, Львівська пл.. 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of depth of object position in earth
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Osypa Volodymyr Oleksandrovych
Назва патенту російськоюСпособ измерения глубины залегания объекта в земле
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Осипа Владимир Александрович
МПК / Мітки
МПК: G01S 17/06
Мітки: об'єкту, спосіб, землі, вимірювання, залягання, глибини
Код посилання
<a href="https://ua.patents.su/8-15171-sposib-vimiryuvannya-glibini-zalyagannya-obehktu-u-zemli.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання глибини залягання об’єкту у землі</a>
Бортова рлс для виявлення підземного об’єкту та вимірювання глибини його залягання
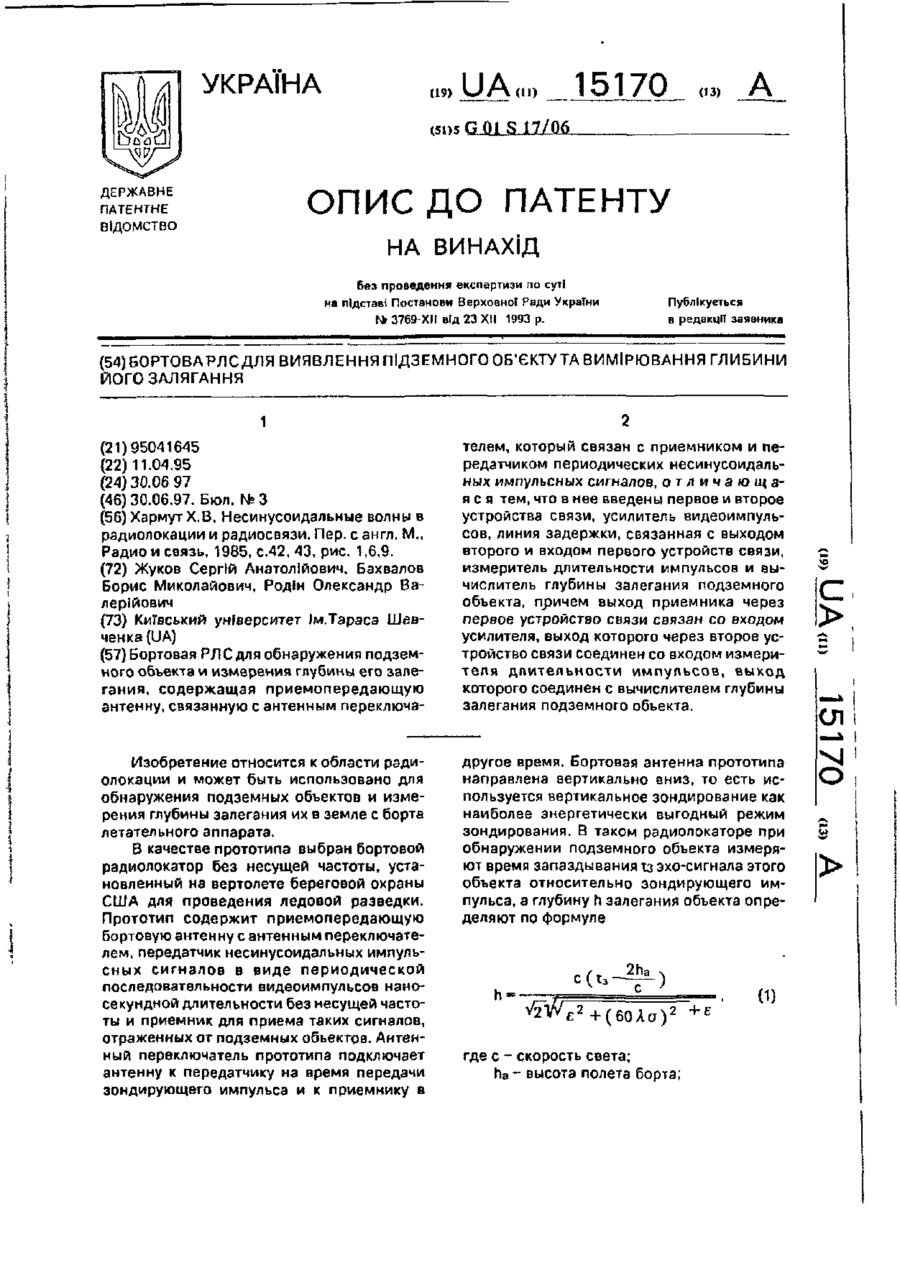
Номер патенту: 15170
Опубліковано: 30.06.1997
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: об'єкту, рлс, глибини, підземного, вимірювання, бортова, виявлення, залягання
Формула / Реферат:
Бортовая РЛС для обнаружения подземного объекта и измерения глубины его залегания, содержащая приемопередающую антенну, связанную с антенным переключателем, который связан с приемником и передатчиком периодических несинусоидальных импульсных сигналов, отличающаяся тем, что в нее введены первое и второе устройства связи, усилитель видеоимпульсов, линия задержки, связанная с выходом второго и входом первого устройств связи, измеритель...
Спосіб виявлення підземних об’єктів з борту літального апарату на фоні пасивних перешкод від земної поверхні
Номер патенту: 15946
Опубліковано: 30.06.1997
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: поверхні, спосіб, пасивних, виявлення, перешкод, літального, об'єктів, апарату, земної, підземних, фоні, борту
Формула / Реферат:
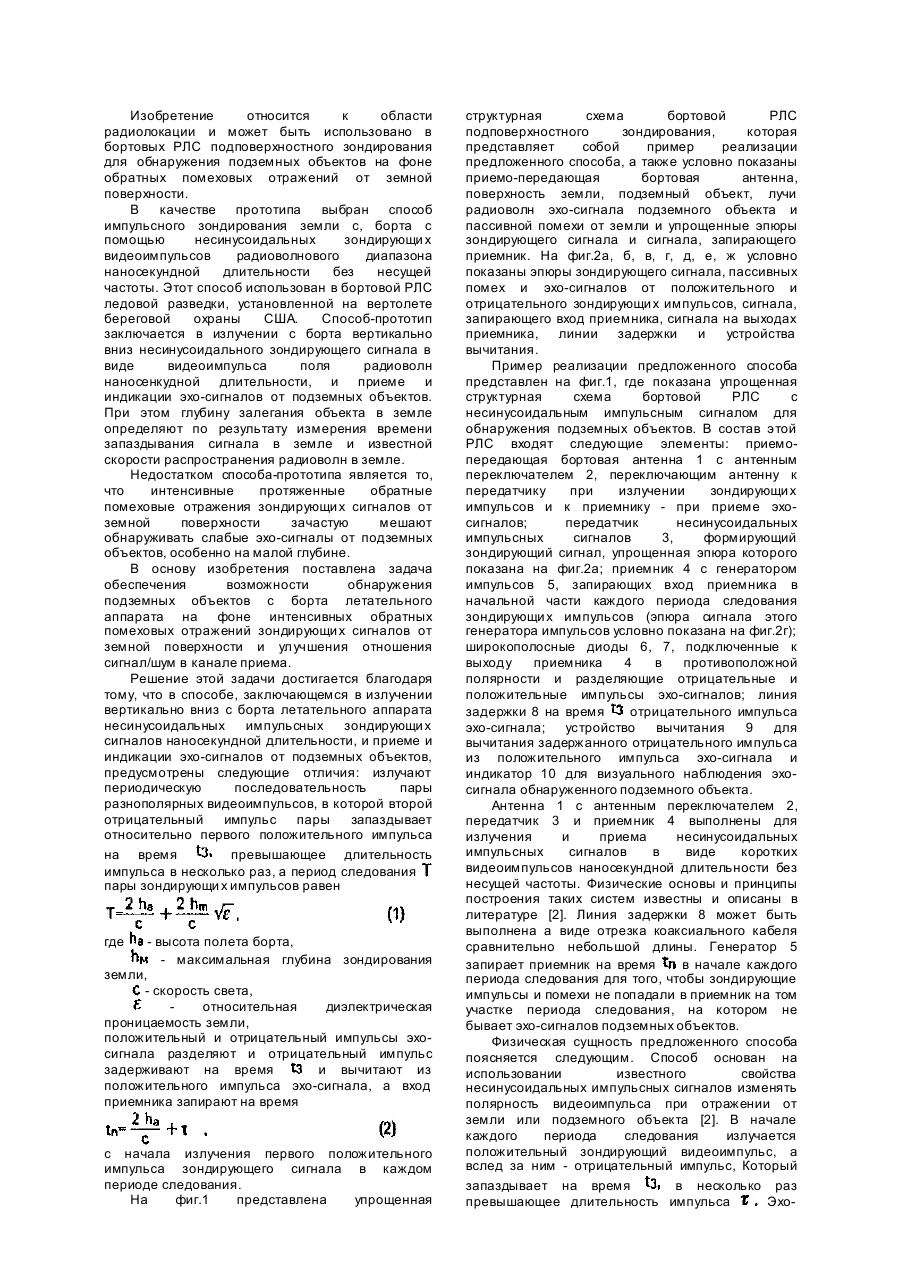
Способ обнаружения подземных объектов с борта летательного аппарата на фоне пассивных помех от земной поверхности, заключающийся в излучении вертикально вниз с борта летательного аппарата несинусоидальных импульсных зондирующих сигналов наносекундной длительности, и приеме и индикации эхо-сигналов от подземных объектов, отличающийся тем, что излучают периодическую последовательность пары разнополярных видеоимпульсов, а которой второй...
Пристрій для вимірювання лінійних розмірів об’єкту
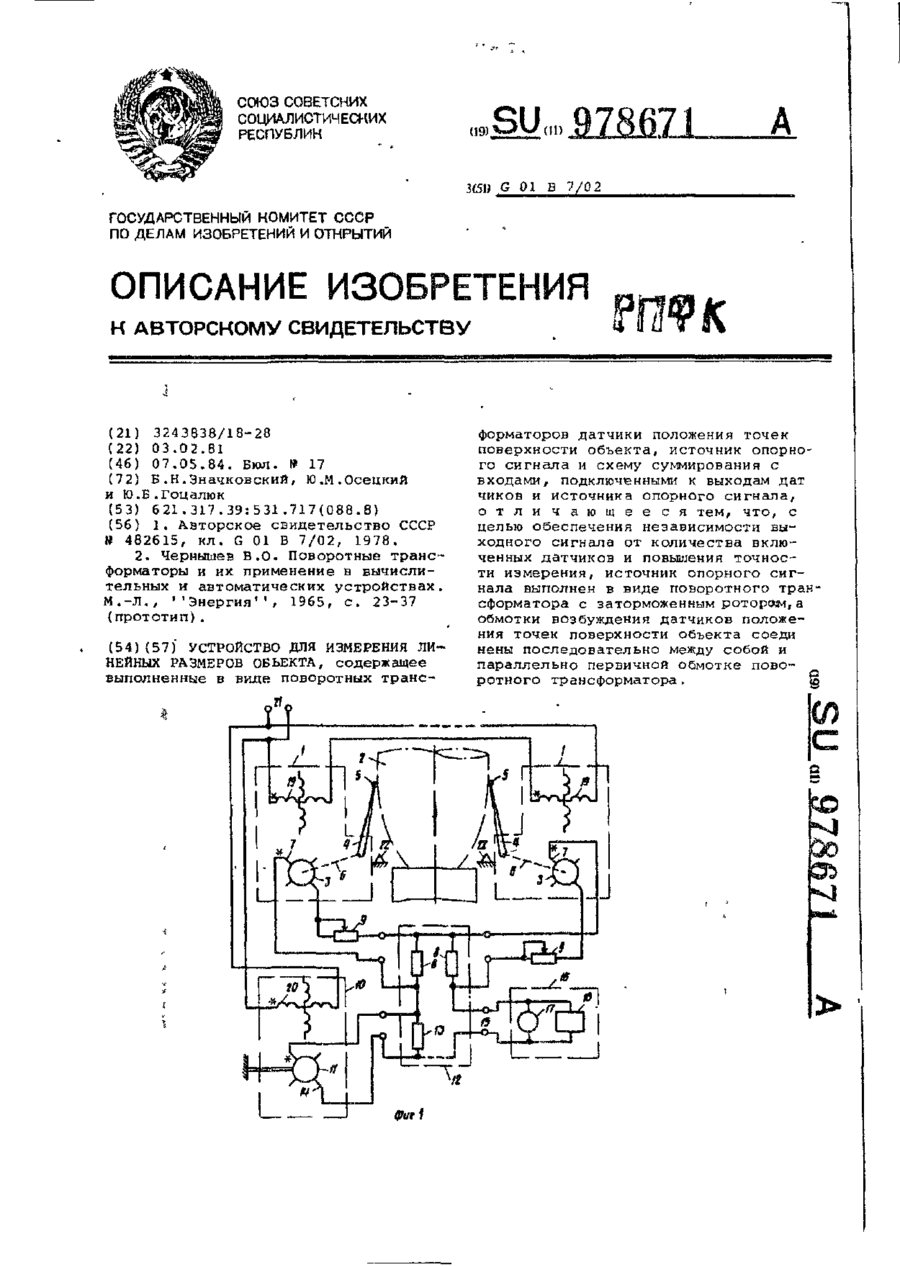
Номер патенту: 5080
Опубліковано: 28.12.1994
Автори: Осецький Юрій Михайлович, Значковський Борис Миколайович, Гоцалюк Юрій Борисович
МПК: G01B 11/00, G01B 7/02
Мітки: об'єкту, вимірювання, розмірів, лінійних, пристрій
Формула / Реферат:
Устройство для измерения линейных размеров объектов, содержащее выполненные в виде поворотных трансформаторов датчики положения точек поверхности объекта, источник опорного сигнала и схему суммирования со входами, подключенными к выходам датчиков и источника опорного сигнала, отличающееся тем, что, с щелью обеспечения независимости выходного сигнала от количества включенных датчиков и повышения точности измерения, источник опорного...
Спосіб вимірювання азимуту повітряних цілей
Номер патенту: 13423
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: цілей, повітряних, вимірювання, азимуту, спосіб
Формула / Реферат:
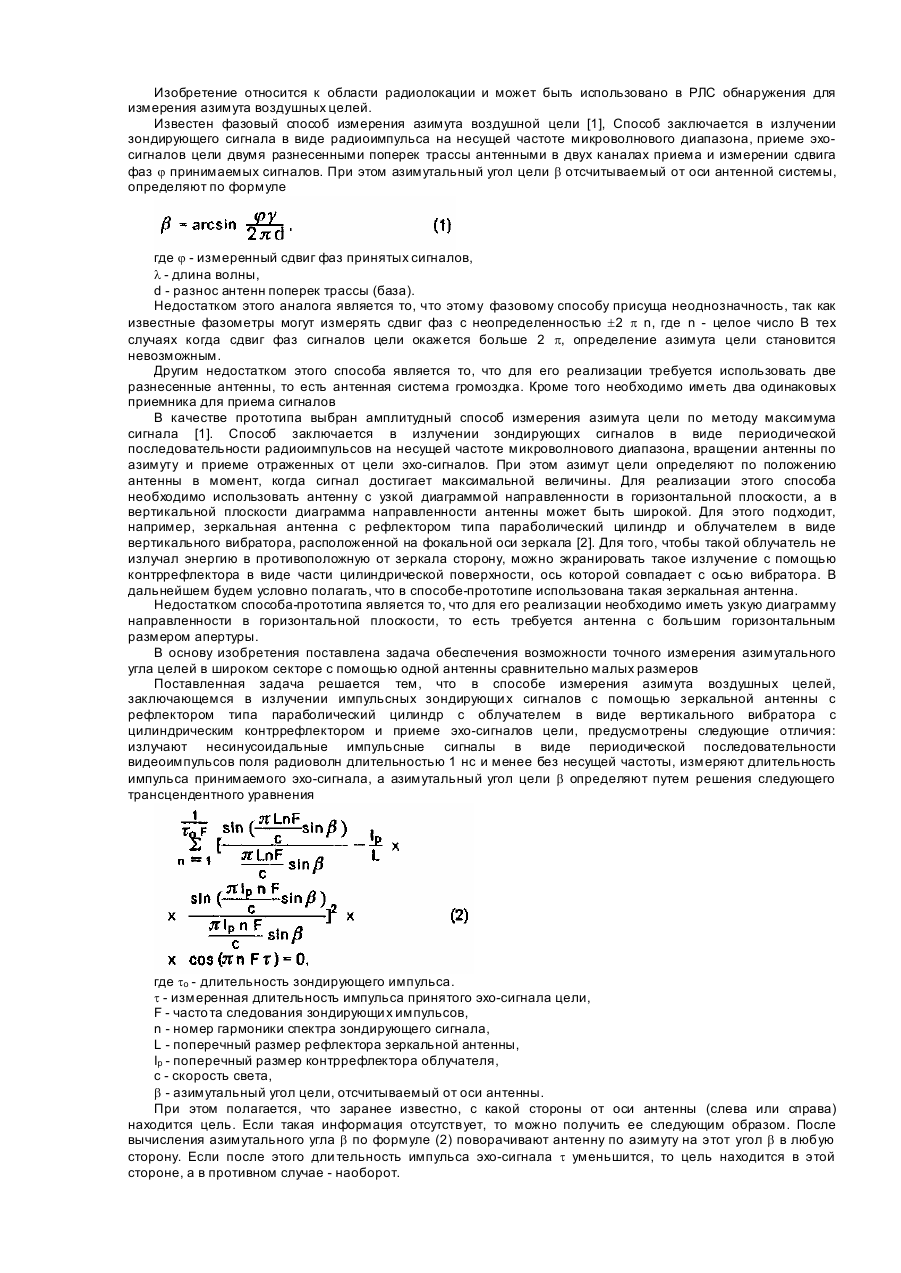
Способ измерения азимута воздушных целей, заключающийся в излучении импульсных зондирующих сигналов с помощью зеркальной антенны с рефлектором типа параболический цилиндр с облучателем в виде вертикального вибратора с цилиндрическим контррефлектором и приеме эхо-сигналов цели, отличающийся тем, что излучают несинусоидальные импульсные сигналы в виде периодической последовательности видеоимпульсов поля радиоволн длительностью 0,1-1 не без...
Спосіб виявлення малошвидкісної цілі на фоні пасивних перешкод від землі для радіолокатора з безперервним випромінюванням
Номер патенту: 17670
Опубліковано: 20.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: виявлення, безперервним, спосіб, перешкод, фоні, цілі, радіолокатора, пасивних, випромінюванням, малошвидкісної, землі
Формула / Реферат:
Способ обнаружения малоскоростной цели на фоне пассивных помех от земли для радиолокатора с непрерывным излучением, заключающийся в излучении непрерывного сигнала с помощью передающей антенны, приеме и индикации эхо-сигнала цели, отличающийся тем, что прием осуществляют с помощью двух одинаковых симметричных приемных антенн, симметрично расположенных относительно передающей антенны на одинаковой высоте над землей, и вычитают сигнал одной...
Попередній патент: Бортова рлс для виявлення підземного об’єкту та вимірювання глибини його залягання
Наступний патент: Система мостового землеробства
Випадковий патент: Керований гідравлічний мотор-барабан