Візуально-оптична система керування протиградовим комплексом
Номер патенту: 29665
Опубліковано: 15.11.2000
Автори: Борисюк Анатолій Олексійович, Киреєв Михайло Степанович
Текст
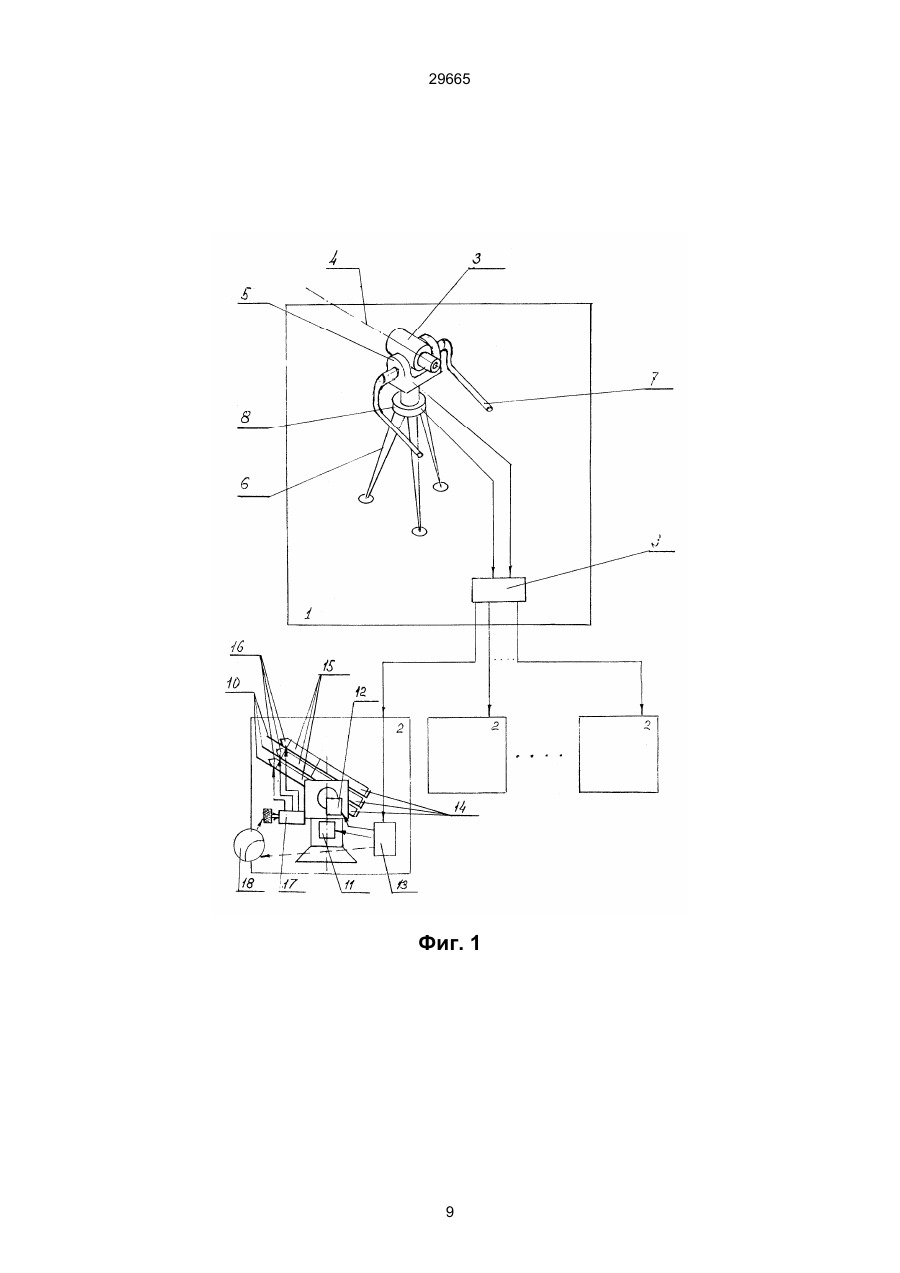
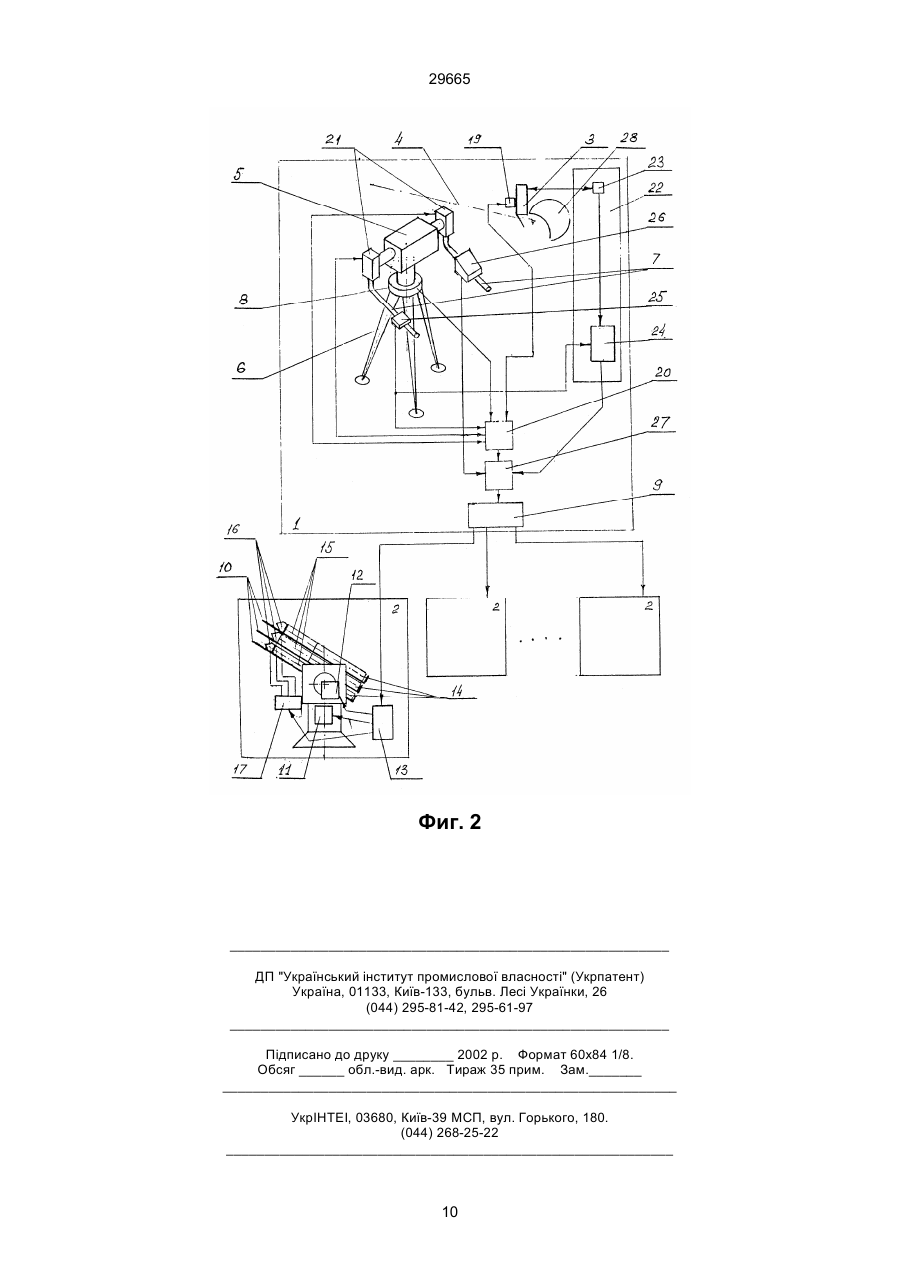
Визуально-оптическая система управления противоградовым комплексом, содержащая входящие в состав выносного поста наблюдения и наведения оптический визир, опору с поворотной траверсой, снабженной датчиком угла азимутального поворота, и аппаратуру передачи сигналов на сервоприводы пространственного разворота направляющих противоградовых установок, каждая из которых оснащена задатчиком времени раскрытия заполненных воздействующим веществом отсеков противоградовых снарядов, отличающаяся тем, что в ней визир снабжен реперным узлом дополнительно введенного измерителя углов пространственного положения контролируемого предмета, включающего блок определения угловых координат объекта визирования, подключенный к датчику угла азимутального поворота траверсы, к реперному узлу, к взаимодействующим с последним посредством электромагнитного излучения и укрепленным на траверсе базовым блокам и к дополнительно введенному узлу фиксации момента измерения координат объекта ви A (54) ВІЗУАЛЬНО-ОПТИЧНА СИСТЕМА КЕРУВАННЯ ПРОТИГРАДОВИМ КОМПЛЕКСОМ 29665 ляющих которых размещены (в контейнерах или без) собственно противоградовые изделия (ПГИ) в виде реактивных или артиллерийских снарядов. Каждый из ПГИ имеет отсек с метеовоздействующим веществом-реагентом (МВР) и таймерное устройство в виде дистанционной трубки (взрывателя) того или иного типа - для раскрытия (срабатывания замков) отсека в нужный момент полета ПГИ, а также для самоликвидации снаряда или выпуска парашютной системна Соответственно, каждая ПГУ снабжена установщиком (задатчиком) времени (момента) раскрытия отсека (в виде совокупности задатчика интервала времени от пуска снаряда до раскрытия отсека и исполнительных механизмов), а также приводами (ручными или, чаще, автоматическими) разворотов направляющих ПГУ по азимуту и углу места. Более подробно о схемотехническом устройстве известных противоградовых комплексов ("Алазань", "Небо", "Кристалл", "Эльбрус" и др.) можно узнать из соответствующих технических описаний (см. также [2-8, 10, 11]). Недостаток СУПГК на базе РЛС заключается в том, что во многих случаях работа РЛС (особенно, в предградовой и градовой обстановке) либо вообще заблокирована атмосферными электрическими разрядами, либо (в большинстве случаев) характеризуется существенно пониженной точностью локализации градоопасных атмосферных образований. Режимы работы метеорологических РЛС во многом также осложняются высоковольтными ЛЭП и/или другими промышленными злектро - и радиопомехами, а также привходящими обстоятельствами [6]. Поэтому вспомогательным (а в некоторых ситуациях единственным) вариантом управления ПГК является визуально-оптическая система управления, которая базируется на использовании оптико-визирных приборов и сопряженных с ними датчиков, располагаемых либо непосредственно на ПГУ, либо на некотором безопасном удалении от нее, в последнем случае - в составе, например, выносного поста наблюдения и наведения (BПHH). Понятно, что ВПНН может быть связан с одной или несколькими ПГУ проводной или радио аппаратурой передачи сигналов (АПС) аналогично тому, как это реализовано в варианте радиолокационной СУ. Существенным преимуществом визуальнооптической СУ является также то обстоятельство, что, как правило, градонесущие образования (ГО), имеют четко контрастирующие очертания на темно-сером фоне грозовой облачности, и их характерные локальности сравнительно хорошо просматриваются визуально и/или с помощью широкоугольных оптических наблюдательно-измерительных приборов, например, визиров телескопического или коллиматорного типа. В известной визуально-оптической СУ основой ВПНН является оптический визир, который установлен на опоре типа, например, треноги и укреплен, на поворотной (по азимуту и углу места) траверсе (типа вертлюга), снабженной датчиками углов пространственного положения визирной оси относительно опоры в некоторой системе координат (например, горизонтированной и связанной с направлением на Север) и соответствующей ру кояткой (рукоятками) поворота траверсы. Наблюдая через оптику визира грозовую облачность, обнаруживают контуры ГО, визируют его характерные пятна (дислокации, локальности) путем совмещения с ними некоторого индекса (перекрестия), связанного однозначно, например, с визирной линией прибора, измеряют угловые координаты этой локальности, и передают эти данные по каналам АПС на ближайший (в смысле эффективной досягаемости) ПВ или непосредственно на ПГУ. Заметим, что более высокая точность измерения угловых координат характерных локальностей ГО, обеспечиваемая оптическим визиром, позволяет, в принципе, более рационально использовать запас МВР, находящийся в комплекте ПГИ, не внося избыточную экологическую нагрузку на окружающую среду. Однако известная визуально-оптическая СУ ПГК имеет два существенных недостатка. Первый из них является следствием недостаточного быстродействия при поиске, визировании, определении угловых координат ГО и выработке данных на развороты направляющих ПГУ. Дело в том, что градообразующие процессы, происходящие в атмосферном ГО и, особенно, фазы, предшествующие непосредственному выпадению града, являются чрезвычайно скоротечными и, как показывают практика и моделирующие эксперименты [6, 8], соизмеримы с временами полета ПГИ от ПГУ до ГО. Поэтому задача сокращения временных затрат на поиск характерных точек (локальностей) в ГО и измерение их относительных (например, полярных) координат, является весьма важной и актуальной. Недостаточное быстродействие известной визуально-оптической СУ ПГК особенно сказывается в весьма частых случаях появления нескольких протяженных ГО над градозащищаемой территорией. Здесь затраты времени на переориентирование визира ВПНН и выработка сигналов на переориентацию ПГУ о помощью известной СУ недопустимо велики. Другой недостаток известной визуально-оптической СУ ПГК заключается в том, что при ее использовании ввод и установку на ПГИ временных интервалов (от момента пуска снаряда до момента раскрытия отсека с МВР) производят на глаз, ориентируясь по интуитивно-глазомерным определениям оператором ПГУ дистанции до ГО (заметим, что при этом неизбежны также существенные потери времени на ручную установку значений на ТУ непосредственно перед пуском ПГИ). Отсюда - невысокая точность выбрасывания МВР и, как следствие, либо пропуск частичного выпадения града, либо неоправданное загрязнение подстилающей поверхности неиспользованным МВР. Отрицательный эффект от обоих недостатков усиливается для случая использования "веерного" метода накрытия ГО, когда необходимо обеспечить последовательные "веерные" развороты ПГУ и доставку МВР до нескольких разнесенных в секторе локальностей ГО или применение ПГИ с одной ПГУ по разным ГО в зоне досягаемости. Из известных визуально-оптических систем управления противоградовым комплексом наибо 2 29665 лее близкой к предлагаемой является принятая за прототип визуально-оптическая СУ ПГК, которая содержит (см. фиг. 1) [11]: - выносной пост наблюдения и наведения (ВПНН) 1, который расположен на некотором известном удалении (например, по соображениям техники безопасности или для более эффективного наблюдения пространства над охраняемой территорией) от одной или нескольких противоградовых установок (ПГУ) 2; - входящий в состав ВПНН 1 оптический визир 3 (например, телескопического типа), снабженный индексом (в виде, например, перекрестия), обозначающий в поле зрения визирную линию 4. Визир 3 укреплен с возможностью поворота по углу места в траверсе (типа вертлюга) 5 и снабжен соответствующим датчиком с отсчетным устройством. Траверса 5 размещена с возможностью кругового поворота по азимуту на опоре 6 (типа, например, треноги) и снабжена одной или двумя рукоятками 7 и азимутальным датчиком 8 с отсчетным устройством. Оба датчика разворотов визирной линии 4 (по углу места и по азимуту) подключены на передающий узел 9 аппаратуры передачи сигналов (АПС), имеющей разветвление на нескольким (по числу ПВ-ПГУ) направлениям; - входящие в состав ПГУ 2 два сервопривода разворотов направляющих 10 установки: по азимуту (азимутальный привод) 11 и по углу места (угломестный привод) 12; которые подключены к приемному узлу 13 АПС. На направляющих 10 расположены противоградовые изделия (ПГИ) 14, выполненные, например, в виде неуправляемых реактивных снарядов, каждый из которых имеет отсек 15 с метеовоздействующим веществом-реагентом (МВР), снабженный соответствующим механизмом раскрытия (срабатывания), который сопряжен с таймерным устройством (ТУ) 16, выполненным, например, в виде дистанционной трубки (или дистанционного взрывателя), установочно-задающие элементы (кольца) которого, например, кинематически связаны с задатчиком (установщиком) временных интервалов раскрытия (срабатывания) отсека (ВИРО) 17, снабженный, например, указателем и ручкой, с которыми взаимодействует оператор 18 ПГУ 2. Необходимые команды по установке заданных значений каждого ТУ (дистанционной трубки) оператор 18 получает через приемный узел 13 от оператора ВПНН 1 или (более вероятная ситуация) определяет сам на глаз, ориентируясь по угломестным и азимутальным разворотам направляющих ПГУ на подлежащее воздействию ГО. Описанная структура визуально-оптической системы управления (СУ) противоградового комплекса (ПГК), принятой за прототип, имеет два существенных недостатка. Первый заключается в невысоком быстродействии при поиске локальностей ГО, их визировании, особенно, при измерении угловых координат быстроразвивающегося градонесущего образования (ГО). что сильно сказывается в ситуации, когда удаленность ГО от противоградовой установки (ПГУ) требует подлетного времени противоградового изделия (ПГИ) - ракеты или снаряда - соиз меримого со временем выпадения града. Положение резко усугубляется в случае нахождения в зоне выносного поста наблюдения и наведения (ВПНН) или поста воздействия (ПВ), содержащего одну или группу ПГУ, одновременно нескольких ГО различной степени развития. В этой ситуации, оборудование известной СУ не позволяет оперативно (с минимальными затратами времени до нескольких секунд), отыскать, завизировать и измерить координаты характерных локальностей ГО, идентифицировать их по очередности градовыпадения, а тем более - выбрать (глазомерно!) необходимое упреждение по горизонту перемещения ГО и по необходимому превышению полета ПГИ и моменту выброса (рассеивания) метеовоздействующего реагента (МВР). Последнее отягчается другим существенным недостатком известной СУ, который заключается в том, что в ней измерение дистанции до ГО реализуется чисто глазомерным способом на основании навыков (опыта, натренированности) оператора ВПНН и/или ПГУ, поскольку именно последний обеспечивает (после автоматического разворота направляющих ПГУ по азимуту и углу места) с помощью задатчика ПГУ ручную установку принятых значений времен на таймерных устройствах (ТУ), в частности, на дистанционных трубках каждого ПГИ. Совместное проявление этих двух недостатков выражается, в конечном итоге, в том, что весьма часто имеет место либо несвоевременная (как правило, запаздывающая) доставка МВР в зону над ГО и/или просто промах трассы полета ПГИ, поскольку неверно было учтено необходимое упреждение по ходу перемещения ГО. Глазомерное определение дистанций приводит к тому, что с опережением или отставанием был раскрыт отсек с МВР. Отрицательный эффект этих недостатков, помимо пропуска (частичного или полного) градобития, проявляется и в повышенном расходе ПГИ, а также в неоправданном загрязнении окружающей среды. В основу изобретения поставлена задача наиболее быстрого измерения относительных координат одного или нескольких ГО и наблюдаемых характерных локальностей с тем, чтобы более точно (с необходимым упреждением и превышением) определить как потребные углы (по азимуту и углу места) запуска ПГИ, так и моменты раскрытия отсека с МВР, и тем самым обеспечить более эффективное противоградовое использование запаса МВР, исключив неоправданное загрязнение окружающей среды. Для решения поставленной задачи в визуально-оптической системе управления противоградовым комплексам, содержащей входящие в состав выносного поста наблюдения и наведения оптический визир, опору с поворотной траверсой, снабженной датчиком угла азимутального поворота, аппаратуру передачи сигналов на сервоприводы пространственного разворота направляющих противоградовых установок, каждая из которых снабжена задатчиком времен раскрытия заполненных воздействующим веществом отсеков противоградовых снарядов, дополнительно введен дистанционный бесконтактный измеритель углов про 3 29665 странственного положения контролируемого предмета, включающий реперный узел, сблокированный с оптический визиром и блок определения угловых координат объекта визирования, подключенный к датчику углов азимутального поворота траверсы, к реперному узлу, к взаимодействующим с последним посредством электромагнитного излучения и укрепленным на траверсе базовым блокам измерителя и к дополнительно введенному узлу фиксации момента измерения координат объекта визирования, который подключен также к дополнительно введенному определителю дистанции до объекта визирования, входные-выходные измерительные компоненты которого коллинеарно связаны с визирной линией визира, при этом выход определителя подсоединен ко входу дополнительного вычислительного блока определения потребных углов пространственного разворота направляющих каждой противоградовой установки и временных интервалов на раскрытие отсеков противоградовых снарядов, другие входы которого .подсоединены к выходу измерителя углов пространственного положения контролируемого предмета и к дополнительно введенному пульту ввода предварительных уставок и метеоусловий, а выход вычислительного блока включен на передающий узел аппаратуры передачи сигналов, причем визир укреплен на дополнительно введенном оголовьи типа шлема так, что выходной зрачок его совмещен с глазом оператора, а задатчик времен раскрытия отсеков подключен к приемному узлу аппаратуры передачи сигналов. Сопоставительный анализ предлагаемой визуально-оптической СУ ПГК и прототипа показывает, что предлагаемая СУ отличается наличием в составе ВПНН: дистанционного бесконтактного измерителя углев пространственного положения контролируемого предмета (УППКП), в качестве которого выступает оптический визир; определителя дистанции до объекта визирования (ДОВ); узла фиксации момента измерения координат объекта визирования (ФМИКОВ); пульта ввода предварительных уставок и метеоусловий (ВПУиМУ); вычислительного блока определения потребных углов пространственного разворота направляющих и временных интервалов (ОПУПРНиВИ) на раскрытие МВР, содержащих отсеков противоградовых снарядов. Отличие заключается также в новом взаиморасположении и функциональных связях известных и вновь введенных компонентов (в том числе входящих в состав измерителя УППКП и определителя ДОВ), а именно: - визир расположен не на траверсе, как у прототипа, а на дополнительно введенном оголовьи типа шлема (каски) наблюдателя и сблокирован с реперным узлом (РУ) из состава дистанционного бесконтактного измерителя УППКП (например, РУ укреплен жестко ориентировано на корпусе визира); - базовые блоки (один или несколько) из комплекта измерителя УППКП укреплены на поворотной траверсе опоры ВПНН; - входные-выходные измерительные компоненты дополнительно введенного определителя ДОВ коллинеарно сопряжены (например, связаны с помощью двукоординатной следящей сервосистемы или укреплены на одном жестком основании) с визиром, точнее - с его визирной линией, - входы измерителя УППКП и определителя ДОВ связаны с дополнительно введенным узлом ФМИКОВ, выполненным, например, в виде кнопки или тангенты; - выходы измерителя УППКП и определителя ДОВ подключены к дополнительному блоку ОПУПРНиВИ, который может быть выполнен, например, в виде автономного (конструктивно законченного) счетно-решающего блока или в виде блока подпрограмм некоторого вычислительного агрегата, входящего в комплект ВПНН, в частности, как блок подпрограмм вычислений в блоке определения угловых координат объекта визирования (ОУКОВ) из состава измерители УППКП; - расположенный на ПГУ приемный узел аппаратуры передачи сигналов (АПС) непосредственно подключен к задатчику временных интервалов раскрытия реагентосодержащих отсеков ПГИ. Известен дистанционный бесконтактный измеритель углов пространственного положения контролируемого предмета (УППКП), который может быть выполнен различным схемотехническим образом. Например, в патентах США 3.983.474 G01R33/02 (1976) и 4.314.251 (G01S5/02 (1982) и других описаны бесконтактные измерители относительных углов пространственного положения некоторого контролируемого (развороты которого хотят измерить) предмета (прибора). Этот измеритель содержит реперный узел (РУ) в виде двух или трех взаимоортогональных "антенных" обмоток, которые воспринимают модулированное электромагнитное излучение, генерируемое одним или несколькими "базовыми" блоками, выполненными в виде совокупности взаимоортогональных излучающих обмоток. И реперный ("антенный") узел и базовый блок (генератор-излучатель) соединены с блоком, в котором воспринимают токи в обмотках РУ и управляют токами в обмотках излучателя (базового блока) в строгом соответствии с математическими зависимостями (уравнениями), однозначное решение которых осуществляют путем нахождения (методом последовательных приближений) значений углов пространственного положения РУ. Аналогично (по структуре и основным функциональным компонентам) построены дистанционные бесконтактные измерители УППКП оптикоэлектронного принципа действия по а. с. СССР 904666 А61В5/10, а также по пат. США: 4.054.881 G01S3/02, НКИ 343/112R (1975); 4.346.384 G01S3/02 НКИ 343/112R (1982); Великобритании: 1.520,154 G01C3/10; EP: 0.058.412 A2 G01S3/10 и др. Блокирование РУ измерителя УППКП с визиром в едином конструктиве и размещение последнего на оголовье (шлеме) оператора позволяет практически мгновенно производить измерение углов пространственного положения визирной ли 4 29665 обеспечивает возможность одновременного измерения угловых координат объекта визирования и дистанции до него. Таким образом, предлагается визуальнооптическая система управления противоградовым комплексом промышленно реализуема, в смысле осуществимости, как вновь вводимых компонентов, так и связей между ними и существующими компонентами. Предлагаемая визуально-оптическая СУ ПГК обеспечивает существенно более высокое быстродействие по поиску, визированию и измерению координат каждой обнаруженной локальности градонесущего образования (ГО), что особенно выгодно сказывается в ситуации, когда над градоохраняемой территорией возникло несколько развивающихся ГО. Наличие сопряженного (сблокированного) с визиром определителя дистанции до объекта визирования в сочетании о вычислительным блоком определения потребных углов пространственного разворота направляющих ПГУ и временных интервалов да раскрытие МВР - содержащих отсеков ПГИ (блоком ОПУПРНиВИ) и пультом ввода предварительных уставок и метеоусловий (ВПУиМУ), а также автоматическая связь по вводу временных интервалов на раскрытие этих отсеков от блока ОПУПРНиВИ через аппаратуру передачи сигналов (АПС) обеспечивают более точное определение необходимых упреждений и превышений по каждой обрабатываемой МВР локальности ГО, а значит - более эффективное использование ПГИ и МВР. Это свидетельствует об изобретательском уровне решения технической задачи. Следовательно, предлагаемая визуально-оптическая ОУ ПГК соответствует всем необходимым критериям патентоспособности. Изложенная сущность предлагаемого технического решения поясняется настоящим описанием и прилагаемыми чертежами, где изображены : - на фиг. 1 - конструктивно-функциональная схема системы-прототипа; - на фиг. 2 - конструктивно-функциональная схема предлагаемой визуально-оптической системы управления противоградовым комплексом (СУ ПГК). В состав предлагаемой визуально-оптической СУ ПЕГ входят: - выносной пост наблюдения и наведения (ВПНН) 1, располагаемый на некотором удалении от так называемого поста воздействия (ПВ), включающего одну или несколько противоградовых установок (ПГУ) 2; - входящие в состав ВПНН 1 оптический визир 3 (например, телескопического или коллиматорного типа), снабженный маркой-индексом, обозначающим в поле зрения визирную линию 4, и траверса 5, установленная с возможностью поворота вокруг вертикальной оси на опоре 6 (типа, например, треноги) и снабженная одной или двумя рукоятками 7 и датчиком угла азимутального поворота 8, а также передающий узел 9 аппаратуры передачи сигналов (АПС), имеющей разветвление на нескольким (по числу ПВ и/или ПГУ) направлениям; - входящие в состав каждой ПГУ 2 два сервопривода разворотов направляющих 10 установ ний (однозначно задаваемой относительно корпуса визира) в системе координат базового блока (одного или нескольких), установленного на азимутально поворотной траверсе опоры BПHH. Известны различного рода визуально-оптические определители дистанций до удаленных объектов. Это могут быть внешнебазовые дальномеры, принцип действия которых заключается в том, что с помощью управляемых индексов в поле зрения визира производят обрамление внешнего контура объекта, максимальный размер (база) которого известны заранее, измеряют угол обрамления и по этим данным вычисляют дистанцию до объекта визирования, имеющего четкий и постоянный контур (см. [14, 15]). Дальномер такого принципа действия не может быть использован в данном техническом решении, поскольку объекты визированиялокальности ГО не имеют четко выраженных и постоянных (заранее известных) размеров. Известны так называемые внутрибазовые дальномеры (см. [15], а также [13]), принцип действия которых заключается в том, что, управляя положением некоторых внутренних оптических элементов дальномера, добиваются сведения изображений объекта визирования, видимых каждым глазом через отдельные оптические каналы, входные зрачки которых разнесены на известное (не менее 1 м) расстояние, измеряют тем самым параллактический угол между сведенными оптическими осями обоих каналов и на основе этих данных вычисляют дистанцию до объекта визирования. Этот прибор также не может быть использован в предлагаемой СУ, так как располагаемый на оголовье визир не может иметь большие габариты и разнесенные на расстояние ³1 м входные зрачки оптической системы. В то же время в предложенной СУПГК может быть использован в качестве устройства грубого определения дистанции оптический дальномер, реализующий оптическую систему т. н. лесотаксационного автоматического высотомера с переменной базой при приборе (см. [15, с. 195-199]). Однако этот определитель ДОВ недопустимо громоздок для размещения на оголовье оператора. Приемлемым для предлагаемой СУ ПГК (по массо-габаритным характеристикам и быстродействию) является также дальномер светолокационного или (более предпочтительно) лазерного типа (см. [16, с. 226-245]), принципы действия которых хорошо известны. В частности, широко распространены лазерные дальномеры (см. [17, с. 135-144] и [18, с. 223-228]) и лазерные локаторы (см. [17, с. 168-184]), схемотехника которых может быть наиболее удачно применена в предлагаемом техническом решении. Особенностью использования дальномеров светолокационного (лазерного) типов в качестве определителя ДОВ является то предложенное техническое решение, согласно которому входные-выходные измерительные компоненты (например, выходной телескоп лазерного излучателя и входное фотоприемное устройство) коллинеарно связаны/сопряжены с визирной линией визира, например, укреплены жестко на одном основании с корпусом визира. Эта особенная взаимосвязь известных технических устройств - визира и определителя ДОВ 5 29665 ки: по азимуту (азимутальный сервопривод АзСП) 11 и по углу места (угломестный сервопривод - УмСП) 12, которые подключены к приемному узлу 13 АПС. На направляющих 10 ПГУ 2 расположены подготовленные к запуску противоградовые изделия (ПГИ) 14, выполненные, например, в виде неуправляемых реактивных снарядов, каждый из которых имеет отсек 15, наполненный метеовоздействующим веществом-реагентом (МВР) и снабженный соответствующим механизмом срабатывания-раскрытия отсека (то есть начала разбрасывания/распыления МВР). Последний сопряжен (кинематически или электрически) с некоторым таймерным (времяотсчитыващим) устройством (ТУ) 16 изделия, выполненным в виде дистанционной трубки или дистанционного взрывателя, установочно-задающие элементы которого (например, кольца трубки) связаны с задатчиком (установщиком) временных интервалов раскрытия (срабатывания) отсека (ВИРО) 17; - введенный дополнительно в ВПНН 1 дистанционный измеритель углов пространственного положения контролируемого предмета (прибора) (УППКП), содержащий: реперный узел (РУ) 19, сблокированный с оптическим визиром 3 (например, на едином кронштейне-основании); блок определения угловых координат объекта визирования (ОУКОВ) 20, соединенный электрически с РУ 19 и датчиком 8 угла азимутального поворота траверсы 6; укрепленные на траверсе 5 один или несколько базовых блоков 21, соединенные электрически с блоком ОУКОВ 20 и взаимодействующие с РУ 19 посредством электромагнитного излучения; - введенный дополнительно в ВПНН 1 определитель дистанции до объекта визирования (ДОВ) 22, который содержит узел входных-выходных измерительных компонентов (ВВИК) 23, выполненный, например (для случая использования в качестве определителя ДОВ лазерного дальномера), в виде комбинации излучающего лазера с телескопической выходной оптикой и фотоприемного устройства с входной оптикой, и электрически соединенной с узлом 23 блок управления излучением и вычисления дистанции (УИВД) 2 ; - введенный дополнительно в ВПНН 1 и установленный, например, на одной из рукояток 7 узел формирования момента измерения координат объекта визирования (ФМИКОВ) 25, выполненный, например, в виде переключателя-кнопки или тангенты, и подключенный электрически ко входам блока ОУКОВ 20 и к определителю ДОВ 22, конкретно - ко входу блока УИВД 24; - введенный дополнительно в ВПНН 1 и установленный на траверсе 5 или на одной из рукояток 7 пульт ввода предварительных уставок и метеоусловий (ВПУиМУ) 26; - введенный дополнительно в ВПНН 1 вычислительный блок определения потребных углов пространственного разворота направляющих и временных интервалов (ОУПРНиВИ) 27, который может быть выполнен либо в виде функционально и конструктивно законченного аппаратнопрограммного устройства, либо в виде программно-алгоритмического пакета (подпрограм мы) некоторого вычислительного агрегата, в частности, блока ОУКОВ 20, входящего в состав измерителя УППКП 1. Входы блока ОУПРНиВИ 27 подсоединены к выходу определителя ДОВ 22, к пульту ВПУиМУ 26 и к выходу блока ОУКОВ 20 из состава измерителя УППКП. Выход блока ОУПРНиВИ 27 подключен к передающему узлу 9 AПC; - введенное дополнительно в ВПНН 1 оголовье 28 для оператора ВПНН 1, выполненное в виде шлема (каски), на котором укреплен оптический визир 3 (например, коллиматорного типа – см. [14, с. 308]) так, что его выходной зрачок совмещен с глазом оператора, например, посредством полупрозрачного отражателя, принадлежащего коллиматорному визиру 3. Как указывалось выше, РУ 19 дистанционного бесконтактного измерителя УППКП сблокирован с оптическим визиром 3. Таким образом, именно визир 3 выступает в качестве контролируемого предмета, то есть, такого предмета, текущие углы пространственного разворота которого (в системе координат базовых блоков 21, а значит, траверсы 5) контролируются (измеряются) с помощью измерителя УППКП. Предлагаемая визуально-оптическая СУ ПГК и ее компоненты функционируют следующим образом. Предполагается, что позиция ПГК на градоохраняемой территории надлежащим образом оборудована и ее соответствующая топогеодезическая подготовка выполнена, а именно : - входящие в состав ПГК ВПНН 1 и одна или несколько ПГУ 2 взаимно сориентированы и привязаны к некоторой (например, "стандартной" земной картографической) системе координат. Это означает, что координаты каждой ПГУ 2 (в виде радиус-векторов или пар ортогональных координат) относительно ВПНН измерены с некоторой точностью, и эти значения посредством пульта ВПУиМУ 26 введены в вычислительные средства ПГК 1, в частности, в вычислительный блок ОПУПРНиВИ 27. Оператор ВПНН с надетым на голову шлемом (оголовьем) 28, на котором укреплен оптический визир 3 (например, коллиматорного типа), сблокированный с входящим в состав дистанционного бесконтактного измерителя УППКП РУ 19„ находясь возле опоры 6 и держась за рукоятки 7 траверсы 5, разворотами головы со шлемом 28 осуществляет обзор и наблюдение воздушного пространства над градоохраняемой территорией. При необходимости поиска ГО в широком секторе оператор спорадически производит (разовые или непрерывные) развороты траверсы 5 вокруг вертикальной оси опоры 6, при этом соответствующие сигналы с датчика УАП 8 поступает в блок ОУКОВ 20 из состава измерителя УППКП. В этот же блок ОУКОВ 20 поступают сигналы с РУ 19 и с взаимодействующих с ним посредством модулированного электромагнитного излучения радиочастотного или оптического диапазона базовых блоков 21, укрепленных на траверсе 5. Таким образом, в блоке ОУКОВ 20 непрерывно формируются сигналы, пропорциональные текущим углам пространственного положения контролируемого предмета, которым является визир 3, а точ 6 29665 нее - его визирная линия 4 (обозначенная в поле зрения, например, некоторым визирным индексом), соединяющая точку расположения ВПНН 1 и любой объект визирования, в частности, обнаруженные оператором и подлежащие метеовоздействию локальности ГО. Отслеживая непрерывно или спорадическими "засечками" обнаруженную локальность ГО, идентифицированную как градоопасная для охраняемой территории, оператор в определенные моменты воздействует (например, нажимает кнопку) на узел ФМИКОВ 25, сигнал с которого поступает в блок ОУКОВ 20 и "выталкивает" оттуда в блок ОПУПРНиВИ 27 пакет сигналов, соответствующих зафиксированным на данный момент значениям углов пространственного положения локальности, подлежащей метеовоздействию. Сигнал с узла ФМИКОВ 25 поступает также на определитель ДОВ 22, в частности, в его блок УИВД 24, где происходит (например, для варианта схемотехнического исполнения определителя ДОВ 22 в виде лазерного дальномера или лидара) формирование импульса посылки измерительного излучения и соответствующий запуск времяизмерительных схем определителя ДОВ 22. Поскольку соединенный электрически с блоком УИВД 24 узел ВВИК 23 сопряжен (связан) коллинеарно с визирной линией оптического визира 3 (например, посредством прецизионных следящих систем или, предпочтительнее, конструктивного блокирования с корпусом визира 3), то апертура (диаграмма) измерительного импульса излучения направлена в это мгновение на объект визирования, и отраженный от него эхо-сигнал воспринимается входным компонентом (фотоприемным устройством) узла ВВИК 23. Таким образом, на выходе определителя ДОВ 22 практически мгновенно после воздействия оператора на узел ФМИКОВ 25 формируется сигнал, пропорциональный дистанции до объекта визирования, то есть до градоопасной локальности ГО. Этот сигнал поступает в вычислительный блок ОУПРНиВИ 27, где в соответствии с заложенным программно-математическим обеспечением, учитывающим упреждение и превышение траекторий, производят вычисление, во-первых, потребных углов пространственного разворота направляющих для каждой из ПТУ 2, и, во-вторых, потребных временных интервалов для каждого из ПГИ 14, расположенных на направляющих 10 и подготовленных к поочередному запуску. Сигналы, полученные в результате этих вычислений, направляют в передающий узел 9 АПС, где производят распределение и передачу этих сигналов на соответствующие ПГУ 2. Приемный узел 13 АПС каждой ПГУ 2 дешифрирует принятые сигналы и передает их значение на азимутальный и угломестный сервоприводы (АзСП 11 и УмСП 12), которые разворачивают направляющие 10 на соответствующие траектории одномоментного или поочередного пуска ПГИ 14. Поскольку приемный узел 13 АПС связан напрямую с задатчиком ВИРО 17, в последнем по полученным значениям сигналов, пропорциональным потребным временным интервалам от запуска каждого ПГИ 14 до раскрытия МВР - содержащего отсека 15, вырабатывают сигналы на установку этих временных интервалов в ТУ 16 каждого ПГИ 14. Например, если ТУ 16 выполнено в виде дистанционного взрывателя (трубки), то задатчик ВИРО 17 разворачивает соответствующие кольца на головной части ПГИ 14. После осуществления всех этих автоматических операций производят пуск снаряда (снарядов) и, в зависимости от метеобстановки, прежде всего, при наличии других градоопасных локальностей в зоне ВПНН 1, обнаруживают и идентифицируют их, визируют и, аналогично предыдущему, производят измерение их относительных координат (угла места, азимута и дистанции) и при необходимости выполняют запуск ПГИ по этому очередному ГО. Таким образом, благодаря предложенному составу и расположению компонентов (известных и дополнительно вводимых) в ВПНН, в частности, установке оптического визира на шлеме оператора, текущие угловые координаты визирной линии которого непрерывно определяются дистанционным бесконтактным измерителем, а также введению непосредственной связи для автоматической установки в ПГУ временных интервалов на срабатывание отсеков с воздействующим МВР, обеспечивается более высокий темп применения ПГИ, существенно повышается точность использования МВР и, соответственно, снижается экологически вредная нагрузка на окружающую среду. Принятые сокращения: ПГК противоградовый комплекс СУ система управления РЛС радиолокационная станция ПВ пункт воздействия ПГУ противоградовая установка ПГЙ противоградовое изделие (снаряд) МВР метеовоздействующее веществореагент ГО градонесущее образование ТУ таймерное устройство ВПНН выносной пост наблюдения и наведения АПС аппаратура передачи сигналов Датчик УАП датчик угла азимутального поворота АзСП азимутальный сервопривод УмСП угломестный сервопривод Задатчик задатчик временных интервалов ВИРО раскрытия отсеков РУ реперный узел Измеритель измеритель углов пространственУППКП ного положения контролируемого предмета (прибора Блок блок определения угловых коорОУКОВ динат объекта визирования Узел узел фиксации момента измереФМИКОВ ния координат объекта визирования Определиопределитель дистанции до обътель ДОВ екта визирования Блок блок определения потребных угОПУПРНиВИ лов пространственного разворота направляющих и временных интервалов Пульт ВПУ пульт ввода предварительных уси МУ тавов и метеоусловий 7 29665 Блок УИВД Узел ВВИК блок управления излучением и вычисления дистанции узел входных-выходных измерительных компонентов Активные воздействия на градообразующие процессы и перспективы усовершенствования льдообразующих реагентов для практики активных воздействий. - М.: Гидрометеоиздат, 1991. С. 238-242. 9. Опыт борьбы с градобитиями в Крыму. / Кулинич А.Е., Ковальчук А.Н. Украинское УГКС. - М.: Гидрометеоиздат, 1984 (ВДНХ). 10. Противоградовый ракетный комплекс "Алазань-2М" / ЦАО-М.: Гидрометеоиздат, 1984 (ВДНХ). 11. Опыт батарейного артиллерийского способа воздействия и его эффективность. / Г.Л. Айрапетян и др. Арм. УГКС - М.: Гидрометеоиздат, 1984 (ВДНХ) - прототип. 12. БМ-21. Техническое описание и инструкция по эксплуатации. - М.: Воениздат, 1982. 13. Техническое описание и инструкция по эксплуатации комплекса 9П140. - М.: Воениздат, 1983. 14. Оптико-механические приборы / С.В. Кулагин и др. - М.: Машиностроение, 1975. 15. Грейм М.А. Оптические дальномеры и высотомеры геометрического типа. - М.: Недра, 1983. 16. Стернзат М.С. Метеорологические приборы и измерения. - Л: Гидрометеоиздат, 1978. 17. Федоров Б.Ф. Лазерные приборы и системы летательных аппаратов. - М: Машиностроение, 1979. 18. Справочник по лазерной технике. – Киев: Техника, 1978. - С. 223-228. Источники иформации: 1. Противоградовая защита в СССР / М.Т Абшаев, И.И. Бурцев, Л.М.Федченко: Сб. "Труды ВТИ". Вып. 20. - М.: Гидрометеоиздат, 1991. - С. 101-108. 2. Временные методические указания по воздействию на градовые процессы / М.Т. Абшаев и др. М.: Гидрометеоиздат, 1987. 3. Абшаев М.Т., Клигер Б.А. Методические указания по применению противоградового комплекса "Алазань" для активных воздействий на гидрометеорологические процессы. – Л.: Гидрометеоиздат, 1989. 4. Противоградовый комплекс ПГИ-М/ЦАО - М.: Гидрометеоиздат, 1984 (ВДНХ). 5. Абшаев М.Т., Клигер Б.А. Методические указания по применению противоградового комплекса "Кристалл" для активных воздействий на гидрометеорологические процессы. – Л.: Гидрометеоиздат, 1989. 6. Дубинин Б.Н. Технико-экономический анализ противоградовых пусковых установок: Сб. научных трудов "Труды ВГИ". – Вып. 80. М.: Гидрометеоиздат, 1991. - С. 160-171. 7. Противоградовый ракетный комплекс "Небо" / ЦАО - ВДНХ - М.: Гидрометеоиздат, 1984. 8. Оценка возможностей применения самоходных противоградовых комплексов / А.В. Кобак и др. / 8 29665 Фиг. 1 9 29665 Фиг. 2 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 10
ДивитисяДодаткова інформація
Назва патенту англійськоюVisual-optical system for control antihail system
Автори англійськоюBorysiuk Anatolii Oleksiiovych, Kyreiev Mykhailo Stepanovych
Назва патенту російськоюВизуально-оптическая система управления противоградовым комплексом
Автори російськоюБорисюк Анатолий Алексеевич, Киреев Михаил Степанович
МПК / Мітки
МПК: G01S 5/00, A01G 15/00
Мітки: комплексом, керування, візуально-оптична, система, протиградовим
Код посилання
<a href="https://ua.patents.su/10-29665-vizualno-optichna-sistema-keruvannya-protigradovim-kompleksom.html" target="_blank" rel="follow" title="База патентів України">Візуально-оптична система керування протиградовим комплексом</a>
Візуально-оптична система керування протиградовим комплексом
Номер патенту: 28429
Опубліковано: 16.10.2000
Автори: Борисюк Анатолій Олексійович, Кирєєв Михайло Степанович
МПК: A01G 15/00, G01S 5/00
Мітки: керування, протиградовим, комплексом, система, візуально-оптична
Формула / Реферат:
1. Визуально-оптическая система управления противоградовым комплексом, содержащая смонтированные на каждой противоградовой установке азимутальный и угломестный приводы разворотов направляющих, а также установщик времен раскрытия реагентосодержащих отсеков каждого из расположенных на направляющих противоградовых изделий, выносной пост наблюдения и наведения, состоящий из опоры с поворотной вокруг вертикальной оси траверсой, снабженной...
Пристрій для керування гірничопрохідницьким комплексом
Номер патенту: 9365
Опубліковано: 30.09.1996
Автори: Олексієв Геннадій Георгієвич, Татаринський Володимир Борисович, Фішман Йосип Давидович, Швиченко Олександр Володимирович, Яроцький Микола Іванович, Ліндаєв Володимир Вікторович
МПК: E21D 9/06, E21C 35/24
Мітки: комплексом, пристрій, керування, гірничопрохідницьким
Формула / Реферат:
1. Устройство для управления горнопроходческим комплексом, содержащее два гидронасоса, гидроблок управления рабочим органом, гидроблок управления элементами крепления забоя, напорные магистрали обоих гидронасосов, соединенные через обратные клапаны с напорной магистралью гидроблока управления элементами крепления забоя, а напорная магистраль одного из гидронасосов соединена с напорной магистралью гидроблока управления рабочим органом...
Оптична система для приціла

Номер патенту: 14994
Опубліковано: 04.03.1997
Автори: Завальний Валерій Володимирович, Орлов Анатолій Іванович
МПК: F41G 1/00
Мітки: оптична, приціла, система
Формула / Реферат:
Оптическая система прицела, содержащая объектив, оборачивающую систему, состоящую из двух компонентов, причем второй компонент выполнен из одиночной линзы, и окуляр, отличающаяся тем, что первый компонент оборачивающей системы выполнен из трех линз, первая из которых расположена относительно второй на расстоянии 0,1 ... 0,5мм, вторая и третья линзы первого компонента оборачивающей системы склеены, при этом фокусное расстояние первого...
Електронно-оптична система для електроннопроменевого пристрою
Номер патенту: 19732
Опубліковано: 25.12.1997
Автор: Гловацький Іван Григорович
МПК: H01J 29/46
Мітки: електронно-оптична, пристрою, електроннопроменевого, система
Формула / Реферат:
1. Электронно-оптическая система для электронно-лучевого прибора, содержащая группу электродов для формирования и предварительной фокусировки электронного пучка, а также главную бипотенциальную линзу, сформированную цилиндрическими фокусирующим электродом и анодом с пружинами, для крепления в колбе, отличающаяся тем, что цилиндр анода выполнен автономно от арматуры электронно-оптической системы и закреплен в горловине электронно-лучевого...
Електронно-оптична система для кольорових кінескопів
Номер патенту: 9066
Опубліковано: 30.09.1996
Автори: Шумик Іван Йосифович, Аксенов Миколай Матвійович, Гейзлер Евген Стефанович, Івашків Володимир Йосифович, Мартинова Віра Петрівна, Ващенюк Микола Миколайович, Циганенко Вячеслав Володимирович
МПК: H01J 29/02
Мітки: електронно-оптична, кінескопів, система, кольорових
Формула / Реферат:
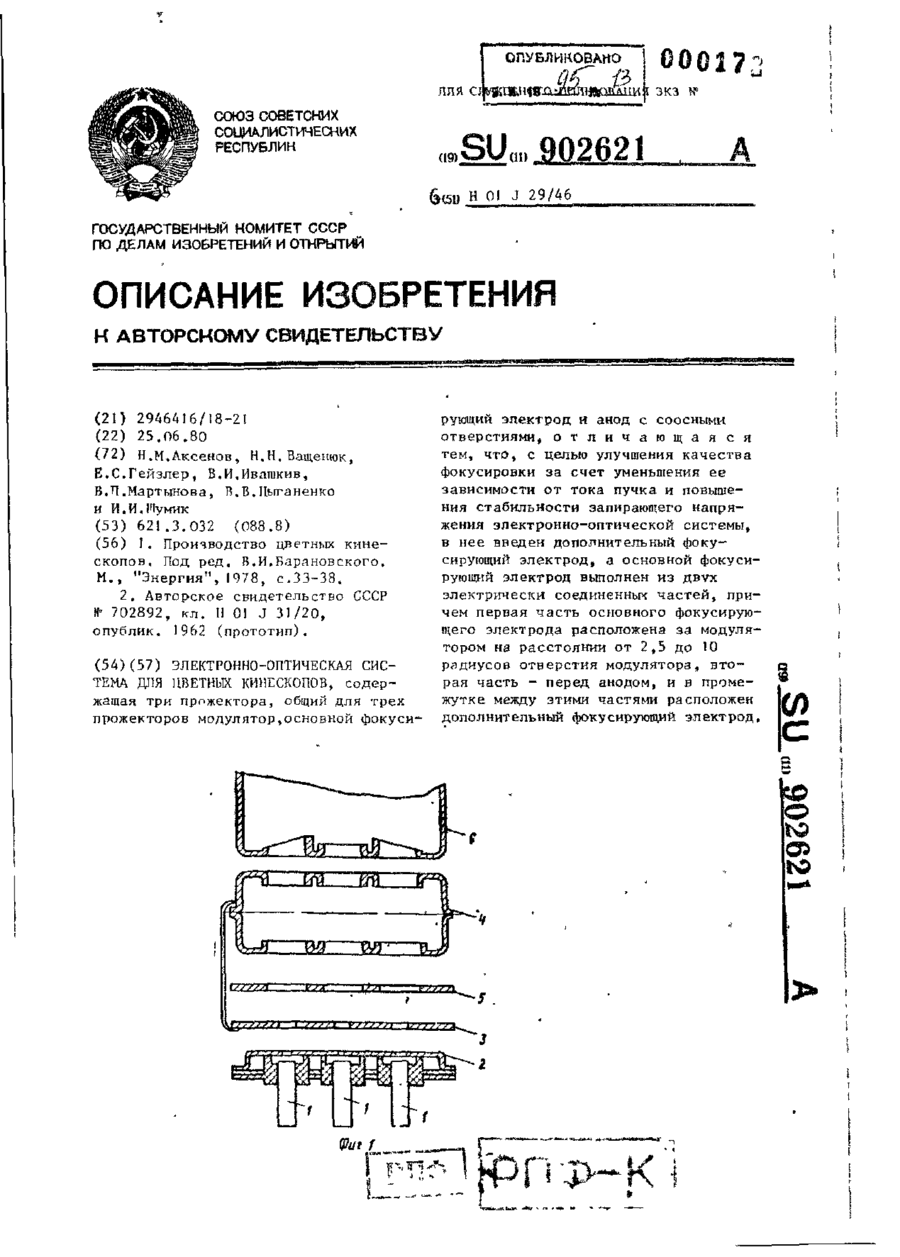
Электронно-оптическая система для цветных кинескопов, содержащая три прожектора, общий для трех прожекторов модулятор, основной фокусирующий электрод и анод с соосными отверстиями, отличающаяся тем, что, с целью улучшения качества фокусировки за счет уменьшения ее зависимости от тока пучка и повышения стабильности запирающего напряжения электронно-оптической системы, в нее введен дополнительный фокусирующий электрод, а основной...
Попередній патент: Спосіб одержання оксиду азоту
Наступний патент: Ударний роз’єднувач колони труб
Випадковий патент: Знімний елемент для установлення на прилади