Лінеаризований цифровий керуючий пристрій для автоматичного регулювання підсилення (арп) і спосіб лінеаризованого цифрового арп
Формула / Реферат
1. Лінеаризований цифровий керуючий пристрій для автоматичного регулювання підсилення (АРП) у радіопристрої з передавальним і приймальним підсилювачами з АРП, який має у складі:
- вимірювач сили прийнятого сигналу, з'єднаний з приймальним підсилювачем з АРП і призначений для формування цифрового сигналу, що відповідає енергетичному рівню прийнятого сигналу,
- інтегратор, з'єднаний з вимірювачем сили прийнятого сигналу і призначений для формування цифрового керуючого сигналу для системи АРП, який відрізняється тим, що має
- приймальний лінеаризатор, який містить сукупність приймальних значень крутизни і сукупність приймальних значень зсуву, з'єднаний з інтегратором і призначений для формування лінеаризованого приймального керуючого сигналу, що відповідає одному з сукупності приймальних значень крутизни і одному з сукупності приймальних значень зсуву,
- приймальний ЦАП, з'єднаний з приймальним лінеаризатором і призначений для перетворення лінеаризованого цифрового приймального керуючого сигналу у аналоговий приймальний керуючий сигнал, який керує підсиленням приймального підсилювача з АРП,
- передавальний лінеаризатор, який містить сукупність передавальних значень крутизни і сукупність передавальних значень зсуву, з'єднаний з інтегратором і призначений для формування лінеаризованого передавального керуючого сигналу, що відповідає одному з сукупності передавальних значень крутизни і одному з сукупності передавальних значень зсуву,
- передавальний ЦАП, з'єднаний з передавальним лінеаризатором і призначений для перетворення лінеаризованого передавального керуючого сигналу у аналоговий передавальний керуючий сигнал, який регулює підсилення передавального підсилювача з АРП.
2. Лінеаризований цифровий керуючий пристрій за п. 1, який відрізняється тим, що додатково має:
- замкнений контур керування потужністю, який приймає команди керування потужністю передачі і
- суматор, перший вхід якого з'єднано з замкненим контуром керування потужністю, другий - з інтегратором, а вихід з'єднано з передавальним лінеаризатором, призначений для складання прийнятого цифрового сигналу керування потужністю з цифровим регулюючим сигналом АРП.
3. Лінеаризований цифровий керуючий пристрій за п. 2, який відрізняється тим, що додатково має передавальний обмежувач потужності передачі, з'єднаний з входом замкненого контура керування потужністю і призначений для обмеження цифрового регулюючого сигналу АРП значеннями, що відповідають максимально припустимому значенню коефіцієнта підсилення.
4. Лінеаризований цифровий керуючий пристрій за п. 1, який відрізняється тим, що додатково має підсилювач потужності, з’єднаний з виходом передавального підсилювача з АРП, і низькошумовий підсилювач, з'єднаний з входом приймального підсилювача з АРП.
5. Лінеаризований цифровий керуючий пристрій за п. 4, який відрізняється тим, що додатково має схему керування динамічним діапазоном підсилювача потужності, з'єднану з інтегратором і з керуючим входом підсилювача потужності і призначену для формування сигналу керування підсиленням підсилювача потужності.
6. Лінеаризований цифровий керуючий пристрій за п. 5, який відрізняється тим, що зазначена схема керування динамічним діапазоном підсилювача потужності має:
- сукупність компараторів, призначених для формування сукупності сигналів порівняння у відповідь на передавальні регулюючі сигнали АРП і сукупність сигналів, визначаючих порогові значення динамічного діапазону і
- кодувач пріоритету, з'єднаний з зазначеною сукупністю компараторів і призначений для формування зазначеного сигналу керування підсиленням підсилювача потужності відповідно до зазначеної сукупності сигналів порівняння.
7. Лінеаризований цифровий керуючий пристрій за п. 4, який відрізняється тим, що додатково має схему керування підсиленням низькошумового підсилювача, з'єднану з інтегратором і з керуючим входом низькошумового підсилювача і призначену для формування сигналу керування підсиленням низькошумового підсилювача.
8. Лінеаризований цифровий керуючий пристрій за п. 7, який відрізняється тим, що зазначений низькошумовий підсилювач має сукупність динамічних діапазонів підсилення, які обираються зазначеним сигналом керування підсиленням низькошумового підсилювача, а схема керування зазначеним динамічним діапазоном підсилення низькошумового підсилювача має:
- компаратор, призначений для формування сигналу порівняння у відповідь на зазначений цифровий регулюючий сигнал АРП і сукупність сигналів, визначаючих порогові значення динамічного діапазону, і
- суматор, з'єднаний з зазначеним компаратором і призначений змінювати зазначений цифровий регулюючий сигнал АРП на значення компенсуючого зсуву, коли зазначений низькошумовий підсилювач переходить від першого динамічного діапазону до другого динамічного діапазону зазначеної сукупності динамічних діапазонів.
9. Лінеаризований цифровий керуючий пристрій за п. 2, який відрізняється тим, що приймальний цифровий сигнал керування потужністю калібровано заздалегідь визначеною константою.
10. Лінеаризований цифровий керуючий пристрій за п. 1, який відрізняється тим, що інтегратор з'єднано з передавальним лінеаризатором через рекурсивний фільтр нижніх частот першого порядку.
11. Лінеаризований цифровий керуючий пристрій за п. 1, який відрізняється тим, що цифровий сигнал, визначаючий рівень потужності, визначається логарифмічною функцією.
12. Лінеаризований цифровий керуючий пристрій для автоматичного регулювання підсилення (АРП) у радіопристрої з передавальним підсилювачем, з'єднаним з підсилювачем потужності і з низькошумовим підсилювачем, з'єднаним з приймальним підсилювачем з АРП,
який має у складі:
- вимірювач сили прийнятого сигналу, з'єднаний з приймальним підсилювачем з АРП і призначений для формування цифрового сигналу, що визначає рівень потужності і відповідає логарифму значення прийнятого сигналу,
- інтегратор, з'єднаний з вимірювачем сили прийнятого сигналу і призначений для формування цифрового керуючого сигналу для системи АРП,
- фільтр, з'єднаний з інтегратором і призначений для фільтрування цифрового регулюючого сигналу АРП,
- схему керування підсиленням низькошумового підсилювача, з'єднану з інтегратором і з низькошумовим підсилювачем і призначену для керування підсиленням низькошумового підсилювача, який відрізняється тим, що має
- приймальний лінеаризатор, який містить сукупність приймальних значень крутизни і сукупність приймальних значень зсуву, з'єднаний з схемою керування підсиленням низькошумового підсилювача і призначений для формування лінеаризованого приймального керуючого сигналу, що відповідає одному з сукупності приймальних значень крутизни і одному з сукупності приймальних значень зсуву,
- приймальний ЦАП, з'єднаний з приймальним лінеаризатором і призначений для перетворення приймального лінеаризованого керуючого сигналу у аналоговий приймальний керуючий сигнал, який керує підсиленням приймального підсилювача з АРП,
- схему обмеження потужності передачі, з'єднану з фільтром і призначену для обмеження цифрового керуючого сигналу згідно з максимальним значенням підсилення,
- передавальний лінеаризатор, який містить сукупність передавальних значень крутизни і сукупність передавальних значень зсуву, з'єднаний з інтегратором і схемою обмеження потужності передачі і призначений для формування передавального лінеаризованого керуючого сигналу, що відповідає одному з сукупності передавальних значень крутизни і одному з сукупності передавальних значень зсуву,
- передавальний ЦАП, з'єднаний з передавальним лінеаризатором і призначений для перетворення лінеаризованого передавального керуючого сигналу у аналоговий передавальний керуючий сигнал, який керує підсиленням передавального підсилювача з АРП.
13. Спосіб лінеаризованого цифрового АРП у радіопристрої з передавальним і приймальним підсилювачами з АРП, з передавальним лінеаризатором, який містить сукупність передавальних значень крутизни і сукупність передавальних значень зсуву, і з приймальним лінеаризатором, який містить сукупність приймальних значень крутизни і сукупність приймальних значень зсуву,
який передбачає операції;
- прийом сигналів радіотелефоном,
- формування на основі прийнятого сигналу цифрового сигналу, що відповідає енергетичному рівню прийнятого сигналу,
- інтегрування цифрового сигналу, що відповідає енергетичному рівню прийнятого сигналу, для формування цифрового керуючого сигналу для системи АРП, який відрізняється тим, що
- формують лінеаризований цифровий приймальний керуючий сигнал, що відповідає одному з сукупності приймальних значень крутизни і одному з сукупності приймальних значень зсуву,
- перетворюють лінеаризований приймальний цифровий керуючий сигнал у аналоговий приймальний керуючий сигнал, який керує підсиленням приймального підсилювача з АРП,
- лінеаризирують цифровий передавальний керуючий сигнал і
- перетворюють лінеаризований передавальний цифровий керуючий сигнал у аналоговий передавальний керуючий сигнал, який керує підсиленням передавального підсилювача з АРП.
14. Спосіб за п. 13, який відрізняється тим, що додатково передбачає обмеження цифрового передавального керуючого сигналу згідно з максимальним значенням підсилення.
Текст
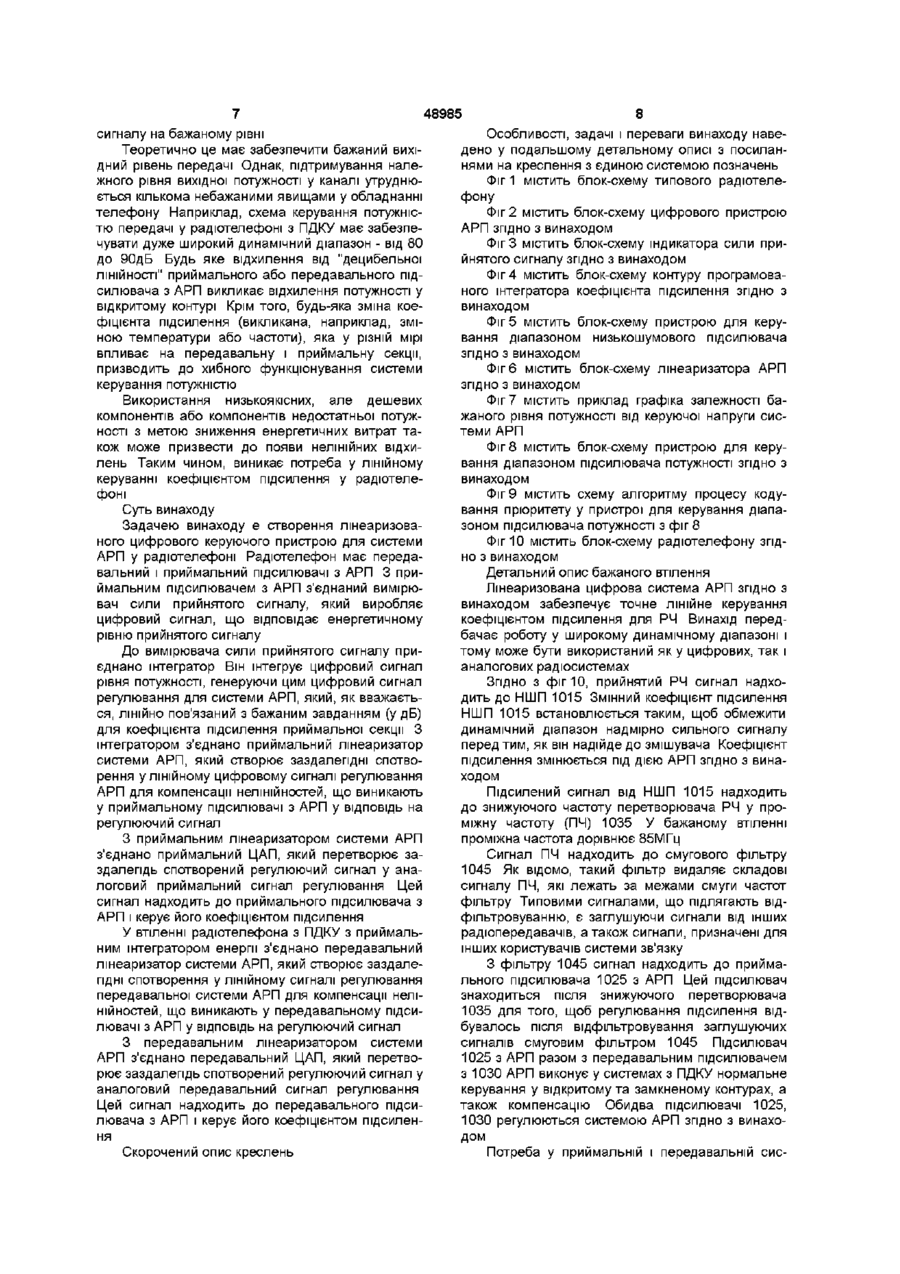
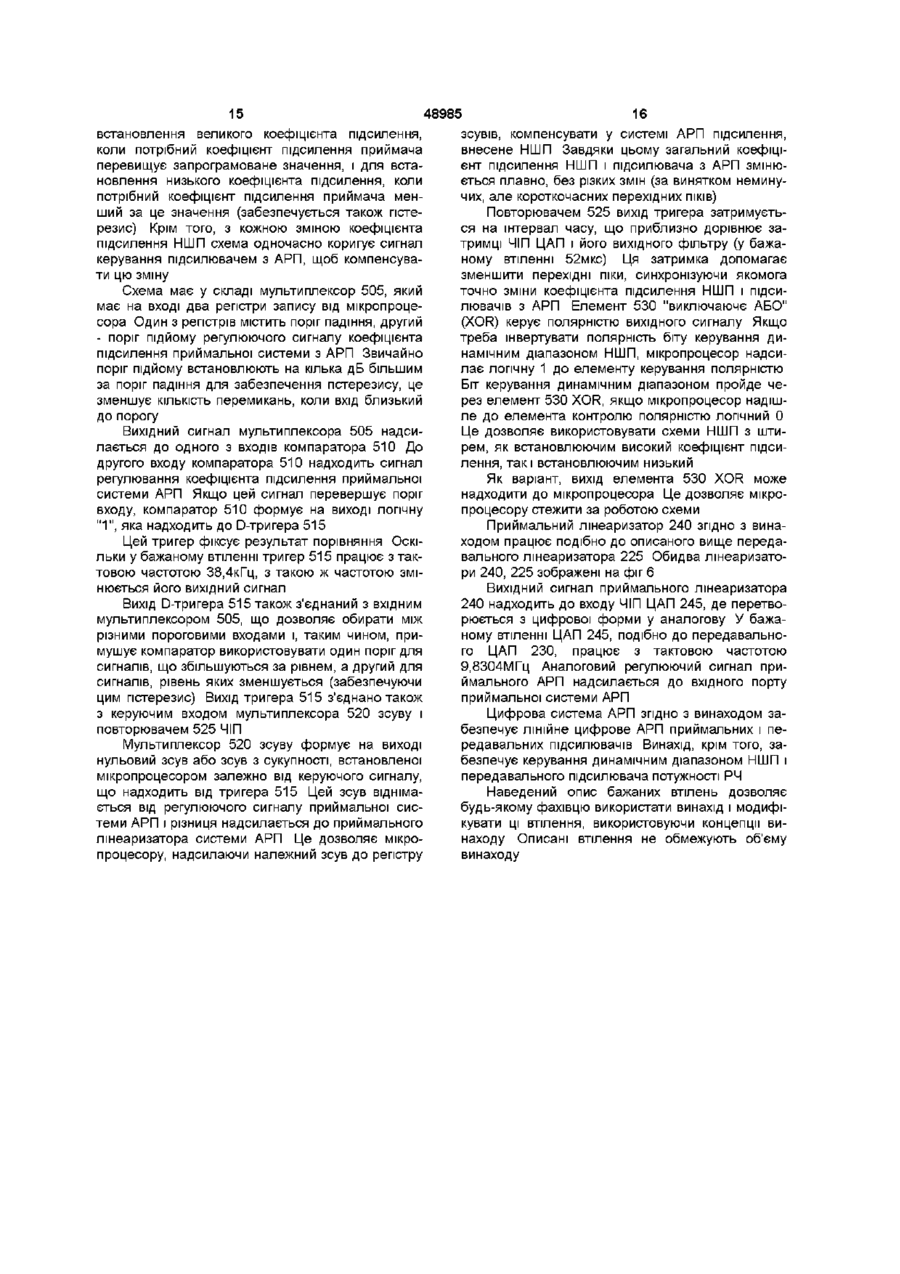
1 Лінеаризований цифровий керуючий пристрій для автоматичного регулювання підсилення (АРП) у радюпристрої з передавальним і приймальним підсилювачами з АРП, який має у складі - вимірювач сили прийнятого сигналу, з'єднаний з приймальним підсилювачем з АРП і призначений для формування цифрового сигналу, що відповідає енергетичному рівню прийнятого сигналу, - інтегратор, з'єднаний з вимірювачем сили прийнятого сигналу і призначений для формування цифрового керуючого сигналу для системи АРП, який відрізняється тим, що має - приймальний лінеаризатор, який містить сукупність приймальних значень крутизни і сукупність приймальних значень зсуву, з'єднаний з інтегратором і призначений для формування лінеаризованого приймального керуючого сигналу, що відповідає одному з сукупності приймальних значень крутизни і одному з сукупності приймальних значень зсуву, - приймальний ЦАП, з'єднаний з приймальним лінеаризатором і призначений для перетворення лінеаризованого цифрового приймального керуючого сигналу у аналоговий приймальний керуючий сигнал, який керує підсиленням приймального підсилювача з АРП, - передавальний лінеаризатор, який містить сукупність передавальних значень крутизни і сукупність передавальних значень зсуву, з'єднаний з інтегратором і призначений для формування лінеаризованого передавального керуючого сигналу, що відповідає одному з сукупності передавальних значень крутизни і одному з сукупності передавальних значень зсуву, - передавальний ЦАП, з'єднаний з передавальним лінеаризатором і призначений для перетворення лінеаризованого передавального керуючого сигналу у аналоговий передавальний керуючий сигнал, який регулює підсилення передавального підсилювача з АРП 2 Лінеаризований цифровий керуючий пристрій за п 1, який відрізняється тим, що додатково має - замкнений контур керування потужністю, який приймає команди керування потужністю передачі і - суматор, перший вхід якого з'єднано з замкненим контуром керування потужністю, другий - з інтегратором, а вихід з'єднано з передавальним лінеаризатором, призначений для складання прийнятого цифрового сигналу керування потужністю з цифровим регулюючим сигналом АРП 3 Лінеаризований цифровий керуючий пристрій за п 2, який відрізняється тим, що додатково має передавальний обмежувач потужності передачі, з'єднаний з входом замкненого контура керування потужністю і призначений для обмеження цифрового регулюючого сигналу АРП значеннями, що відповідають максимально припустимому значенню коефіцієнта підсилення 4 Лінеаризований цифровий керуючий пристрій за п 1, який відрізняється тим, що додатково має підсилювач потужності, з'єднаний з виходом передавального підсилювача з АРП, і низькошумовий підсилювач, з'єднаний з входом приймального підсилювача з АРП 5 Лінеаризований цифровий керуючий пристрій за п 4, який відрізняється тим, що додатково має схему керування динамічним діапазоном підсилювача потужності, з'єднану з інтегратором і з керуючим входом підсилювача потужності і призначену для формування сигналу керування підсиленням підсилювача потужності 6 Лінеаризований цифровий керуючий пристрій за п 5, який відрізняється тим, що зазначена схема керування динамічним діапазоном підсилювача потужності має - сукупність компараторів, призначених для формування сукупності сигналів порівняння у ВІДПОВІДЬ на передавальні регулюючі сигнали АРП і сукупність сигналів, визначаючих порогові значення динамічного діапазону і О ю 00 о> 00 48985 - кодувач пріоритету, з єднаний з зазначеною сукупністю компараторів і призначений для формування зазначеного сигналу керування підсиленням підсилювача потужності ВІДПОВІДНО ДО зазначеної сукупності сигналів порівняння 7 Лінеаризований цифровий керуючий пристрій за п 4, який відрізняється тим, що додатково має схему керування підсиленням низькошумового підсилювача, з'єднану з інтегратором і з керуючим входом низькошумового підсилювача і призначену для формування сигналу керування підсиленням низькошумового підсилювача 8 Лінеаризований цифровий керуючий пристрій за п 7, який відрізняється тим, що зазначений низькошумовий підсилювач має сукупність динамічних діапазонів підсилення, які обираються зазначеним сигналом керування підсиленням низькошумового підсилювача, а схема керування зазначеним динамічним діапазоном підсилення низькошумового підсилювача має - компаратор, призначений для формування сигналу порівняння у ВІДПОВІДЬ на зазначений цифровий регулюючий сигнал АРП і сукупність сигналів, визначаючих порогові значення динамічного діапазону, і - суматор, з'єднаний з зазначеним компаратором і призначений змінювати зазначений цифровий регулюючий сигнал АРП на значення компенсуючого зсуву, коли зазначений низькошумовий підсилювач переходить від першого динамічного діапазону до другого динамічного діапазону зазначеної сукупності динамічних діапазонів 9 Лінеаризований цифровий керуючий пристрій за п 2, який відрізняється тим, що приймальний цифровий сигнал керування потужністю калібровано заздалегідь визначеною константою 10 Лінеаризований цифровий керуючий пристрій за п 1, який відрізняється тим, що інтегратор з'єднано з передавальним лінеаризатором через рекурсивний фільтр нижніх частот першого порядку 11 Лінеаризований цифровий керуючий пристрій за п 1, який відрізняється тим, що цифровий сигнал, визначаючий рівень потужності, визначається логарифмічною функцією 12 Лінеаризований цифровий керуючий пристрій для автоматичного регулювання підсилення (АРП) у радюпристрої з передавальним підсилювачем, з'єднаним з підсилювачем потужності і з низькошумовим підсилювачем, з'єднаним з приймальним підсилювачем з АРП, який має у складі - вимірювач сили прийнятого сигналу, з'єднаний з приймальним підсилювачем з АРП і призначений для формування цифрового сигналу, що визначає рівень потужності і відповідає логарифму значення прийнятого сигналу, - інтегратор, з'єднаний з вимірювачем сили прийнятого сигналу і призначений для формування цифрового керуючого сигналу для системи АРП, - фільтр, з'єднаний з інтегратором і призначений для фільтрування цифрового регулюючого сигналу АРП, - схему керування підсиленням низькошумового підсилювача, з'єднану з інтегратором і з низькошумовим підсилювачем і призначену для керуван ня підсиленням низькошумового підсилювача, який відрізняється тим, що має - приймальний лінеаризатор, який містить сукупність приймальних значень крутизни і сукупність приймальних значень зсуву, з'єднаний з схемою керування підсиленням низькошумового підсилювача і призначений для формування лінеаризованого приймального керуючого сигналу, що відповідає одному з сукупності приймальних значень крутизни і одному з сукупності приймальних значень зсуву, - приймальний ЦАП, з'єднаний з приймальним лінеаризатором і призначений для перетворення приймального лінеаризованого керуючого сигналу у аналоговий приймальний керуючий сигнал, який керує підсиленням приймального підсилювача з АРП, - схему обмеження потужності передачі, з'єднану з фільтром і призначену для обмеження цифрового керуючого сигналу згідно з максимальним значенням підсилення, - передавальний лінеаризатор, який містить сукупність передавальних значень крутизни і сукупність передавальних значень зсуву, з'єднаний з інтегратором і схемою обмеження потужності передачі і призначений для формування передавального лінеаризованого керуючого сигналу, що відповідає одному з сукупності передавальних значень крутизни і одному з сукупності передавальних значень зсуву, - передавальний ЦАП, з'єднаний з передавальним лінеаризатором і призначений для перетворення лінеаризованого передавального керуючого сигналу у аналоговий передавальний керуючий сигнал, який керує підсиленням передавального підсилювача з АРП 13 Спосіб лінеаризованого цифрового АРП у радюпристрої з передавальним і приймальним підсилювачами з АРП, з передавальним лінеаризатором, який містить сукупність передавальних значень крутизни і сукупність передавальних значень зсуву, і з приймальним лінеаризатором, який містить сукупність приймальних значень крутизни і сукупність приймальних значень зсуву, який передбачає операції, - прийом сигналів радіотелефоном, - формування на основі прийнятого сигналу цифрового сигналу, що відповідає енергетичному рівню прийнятого сигналу, - інтегрування цифрового сигналу, що відповідає енергетичному рівню прийнятого сигналу, для формування цифрового керуючого сигналу для системи АРП, який відрізняється тим, що - формують лінеаризований цифровий приймальний керуючий сигнал, що відповідає одному з сукупності приймальних значень крутизни і одному з сукупності приймальних значень зсуву, - перетворюють лінеаризований приймальний цифровий керуючий сигнал у аналоговий приймальний керуючий сигнал, який керує підсиленням приймального підсилювача з АРП, - лінеаризирують цифровий передавальний керуючий сигнал і - перетворюють лінеаризований передавальний цифровий керуючий сигнал у аналоговий переда 48985 вальний керуючий сигнал, який керує підсиленням передавального підсилювача з АРП 14 Спосіб за п 13, який відрізняється тим, що додатково передбачає обмеження цифрового пе редавального керуючого сигналу згідно з максимальним значенням підсилення Федеральна КОМІСІЯ З зв'язку визначає використання спектру радіочастот (РЧ) Ця КОМІСІЯ призначає певні діапазони РЧ для спеціального використання Користувачі призначеного діапазону РЧ повинні вживати засобів, які б гарантували, що рівень випромінювання у цьому діапазоні і поза ним утримується у припустимих межах, щоб уникнути створення перешкод для інших користувачів, що працюють у цьому або іншому діапазоні Ці межі встановлюються як зазначеною КОМІСІЄЮ, так і групами користувачів діапазону У СТІЛЬНИКОВІЙ 800МГц радіотелефонній системі прямий зв'язок від чарунки до радіотелефону здійснюється у діапазоні від 869,01МГц до 893,97МГц Зворотний зв'язок від радіотелефону до чарунки здійснюється у діапазоні від 824,01МГц до 848,97МГц Діапазони прямого та зворотного зв'язків розділено на канали, кожен з яких займає смугу ЗОкГц Користувач може працювати у одному або кількох з цих каналів одночасно У СТІЛЬНИКОВІЙ радіотелефонній системі можна використовувати кілька різних способів модуляції Прикладами можуть бути паралельний доступ з розподілом частот (ПДРЧ) і паралельний доступ з кодовим ущільненням (ГІДКУ) Модуляція для ПДРЧ створює сигнали, які у кожний момент часу займають один канал, сигнали, модульовані для ПДКУ, займають кілька каналів Обидва способи вимагають утримання випромінювання зворотного зв'язку у прийнятних межах у призначених діапазоні або діапазонах або поза ними Щоб досягти максимальної ефективності системи з ПДКУ, користувачі мають ретельно контролювати рівень випромінюваної енергії у своїх каналах Приймач ПДКУ, який приймає інформаційні сигнали з цифровою модуляцією, звичайно має у складі підсилювач з коефіцієнтом підсилення, який регулюється керуючим сигналом Регулювання коефіцієнта підсилення прийнятого сигналу за допомогою керуючого сигналу називають автоматичним регулюванням підсилення (АРП) У цифрових приймачах АРП передбачає вимірювання потужності вихідного сигналу підсилювача Щоб створити сигнал розузгодження, виміряне значення порівнюється з еталонним, яке відповідає бажаній потужності сигналу Сигнал розузгодження потім використовується для керування змінним коефіцієнтом підсилення підсилювача, щоб регулювати силу сигналу до його збігу з бажаною потужністю сигналу Для здійснення цифрової демодуляції з оптимальним відношенням сигнал/шум система АРП підтримує амплітуду модулюючого сигналу згідно з динамічним діапазоном АЦП для модулюючих сигналів Для цього звичайно потрібно, щоб АРП охоплювало повний динамічний діапазон потужно стей прийнятого сигналу На фіг 1 зображено типовий стільниковий радіотелефон Він має передавальну секцію 102 і приймальну секцію 103 У передавальній секції 102 мікрофон 110 приймає голосовий сигнал і перетворює його у аналоговий, який кодується і модулюється (115) Модульований сигнал Тх має проміжну частоту Тх надходить до підсилювача 120 з АРП Для радіотелефонів з ПДКУ передавальна система 120 АРП сумісно керується (125) рівнем потужності прийнятого сигналу, тобто у відкритому контурі, і командами керування потужністю передачі, що надходять від чарунки 130, тобто у замкненому контурі керування потужністю Керування як у відкритому, так і замкненому контурах детально описано у патенті США 5 056 109 Від підсилювача з АРП сигнал надходить до підсилювача 101 потужності, а від нього до дуплексера 145, який надсилає сигнал до антени 150 для передачі Прийнятий антеною 150 сигнал спрямовується дуплексером 145 до приймальній секції 103, де він надходить до низькошумового підсилювача (НШП) 155 Підсилений сигнал від НШП 155 надходить до приймальної системи АРП 160 Ця система керується рівнем 165 потужності прийнятого сигналу Після ЦЬОГО сигнал демодулюється і декодується (170) і у вигляді аналогового голосового сигналу транслюється гучномовцем 175 У радіотелефонах з ПДКУ може трапитись, що вихідну потужність підсилювача 101 передавача буде доведено до рівня, перевершуючого рівень, що відповідає припустимому позаканальному випромінюванню Причиною цього є, головним чином, підвищений рівень спотворень на виході підсилювача 101 потужності при великих значеннях вихідної потужності Крім того, коли вихідна потужність підсилювача 101 потужності перевищує певний рівень, це створює внутрішні перешкоди у радіотелефоні У радіотелефонах з ПДКУ належна вихідна потужність визначається командами "відкритого контуру" телефону і командами "замкненого контуру" від базової станції Оцінки у відкритому контурі виробляються у телефоні шляхом вимірювання потужності, що приймається від базової станції з увагою до симетричного каналу, тобто виходячи з припущення, що наскільки (у дБ) прийнятий сигнал не досягає певного еталонного рівня, настільки (у дБ) сигнал, що передається телефоном, перевищуватиме інший еталонний рівень Цього звичайно можна досягти, використовуючи підсилювачі з АРП приймального і передавального шляхів, які є "децибельно ЛІНІЙНИМИ", І надсилаючи керуючий сигнал до загального керуючого пристрою, функцією якого є встановлення прийнятого 48985 сигналу на бажаному рівні Теоретично це має забезпечити бажаний вихідний рівень передачі Однак, підтримування належного рівня вихідної потужності у каналі утруднюється кількома небажаними явищами у обладнанні телефону Наприклад, схема керування потужністю передачі у радіотелефоні з ПДКУ має забезпечувати дуже широкий динамічний діапазон - від 80 до 90дБ Будь яке відхилення від "децибельної ЛІНІЙНОСТІ" приймального або передавального підсилювача з АРП викликає відхилення потужності у відкритому контурі Крім того, будь-яка зміна коефіцієнта підсилення (викликана, наприклад, зміною температури або частоти), яка у різній мірі впливає на передавальну і приймальну секції, призводить до хибного функціонування системи керування потужністю Використання низькоякісних, але дешевих компонентів або компонентів недостатньої потужності з метою зниження енергетичних витрат також може призвести до появи нелінійних відхилень Таким чином, виникає потреба у лінійному керуванні коефіцієнтом підсилення у радіотелефоні Суть винаходу Задачею винаходу є створення лінеаризованого цифрового керуючого пристрою для системи АРП у радіотелефоні Радіотелефон має передавальний і приймальний підсилювачі з АРП 3 приймальним підсилювачем з АРП з'єднаний вимірювач сили прийнятого сигналу, який виробляє цифровий сигнал, що відповідає енергетичному рівню прийнятого сигналу До вимірювача сили прийнятого сигналу приєднано інтегратор Він інтегрує цифровий сигнал рівня потужності, генеруючи цим цифровий сигнал регулювання для системи АРП, який, як вважається, ЛІНІЙНО пов'язаний з бажаним завданням (у дБ) для коефіцієнта підсилення приймальної секції З інтегратором з'єднано приймальний лінеаризатор системи АРП, який створює заздалегідні спотворення у лінійному цифровому сигналі регулювання АРП для компенсації нелінійностей, що виникають у приймальному підсилювачі з АРП у ВІДПОВІДЬ на регулюючий сигнал З приймальним лінеаризатором системи АРП з'єднано приймальний ЦАП, який перетворює заздалегідь спотворений регулюючий сигнал у аналоговий приймальний сигнал регулювання Цей сигнал надходить до приймального підсилювача з АРП і керує його коефіцієнтом підсилення У втіленні радютелефона з ПДКУ з приймальним інтегратором енергії з'єднано передавальний лінеаризатор системи АРП, який створює заздалегідні спотворення у лінійному сигналі регулювання передавальної системи АРП для компенсації нелінійностей, що виникають у передавальному підсилювачі з АРП у ВІДПОВІДЬ на регулюючий сигнал З передавальним лінеаризатором системи АРП з'єднано передавальний ЦАП, який перетворює заздалегідь спотворений регулюючий сигнал у аналоговий передавальний сигнал регулювання Цей сигнал надходить до передавального підсилювача з АРП і керує його коефіцієнтом підсилення Скорочений опис креслень 8 Особливості, задачі і переваги винаходу наведено у подальшому детальному описі з посиланнями на креслення з єдиною системою позначень Фіг 1 містить блок-схему типового радіотелефону Фіг 2 містить блок-схему цифрового пристрою АРП згідно з винаходом Фіг 3 містить блок-схему індикатора сили прийнятого сигналу згідно з винаходом Фіг 4 містить блок-схему контуру програмованого інтегратора коефіцієнта підсилення згідно з винаходом Фіг 5 містить блок-схему пристрою для керування діапазоном низькошумового підсилювача згідно з винаходом Фіг 6 містить блок-схему лшеаризатора АРП згідно з винаходом Фіг 7 містить приклад графіка залежності бажаного рівня потужності від керуючої напруги системи АРП Фіг 8 містить блок-схему пристрою для керування діапазоном підсилювача потужності згідно з винаходом Фіг 9 містить схему алгоритму процесу кодування пріоритету у пристрої для керування діапазоном підсилювача потужності з фіг 8 Фіг 10 містить блок-схему радіотелефону згідно з винаходом Детальний опис бажаного втілення Лінеаризована цифрова система АРП згідно з винаходом забезпечує точне лінійне керування коефіцієнтом підсилення для РЧ Винахід передбачає роботу у широкому динамічному діапазоні і тому може бути використаний як у цифрових, так і аналогових радіосистемах Згідно З фіг 10, прийнятий РЧ сигнал надходить до НШП 1015 Змінний коефіцієнт підсилення НШП 1015 встановлюється таким, щоб обмежити динамічний діапазон надмірно сильного сигналу перед тим, як він надійде до змішувача Коефіцієнт підсилення змінюється під дією АРП згідно з винаходом Підсилений сигнал від НШП 1015 надходить до знижуючого частоту перетворювача РЧ у проміжну частоту (ПЧ) 1035 У бажаному втіленні проміжна частота дорівнює 85МГц Сигнал ПЧ надходить до смугового фільтру 1045 Як відомо, такий фільтр видаляє складові сигналу ПЧ, які лежать за межами смуги частот фільтру Типовими сигналами, що підлягають відфільтровуванню, є заглушуючи сигнали від інших радіопередавачів, а також сигнали, призначені для інших користувачів системи зв'язку З фільтру 1045 сигнал надходить до приймального підсилювача 1025 з АРП Цей підсилювач знаходиться після знижуючого перетворювача 1035 для того, щоб регулювання підсилення відбувалось після відфільтровування заглушуючих сигналів смуговим фільтром 1045 Підсилювач 1025 з АРП разом з передавальним підсилювачем з 1030 АРП виконує у системах з ПДКУ нормальне керування у відкритому та замкненому контурах, а також компенсацію Обидва підсилювачі 1025, 1030 регулюються системою АРП згідно з винаходом Потреба у приймальній і передавальній сис 48985 темах АРП зумовлюється вимогою широкого динамічного діапазону у передавальному і приймальному каналах систем з ПДКУ У бажаному втіленні система АРП забезпечує динамічний діапазон коефіцієнта підсилення більше 80 дБ Контрольовано підсилений сигнал ПЧ від підсилювача 1025 з АРП надходить до другого знижуючого перетворювача 1050 Цей перетворювач зводить ВХІДНІ сигнали до базової смуги (з центром у ОГц) частот і створює дві сукупності сигналів Іпфази і квадратурної Q-фази (І & Q) у цифровій формі Зрозуміло, що перетворення сигналу з цифрової у аналогову форму, яке здійснюється перетворювачем 1050, можливе як до, так і після перетворення до базової смуги У системі з ПДКУ сигнали базової смуги являють собою І та Q примірники закодованих цифрових даних, які надсилаються для подальших демодуляції і кореляції У дуальному режимі приймач, що працює у режимах як ЧМ, так і ПДКУ, ВИХІДНІ сигнали І, Q знижуючого перетворювача 1050 далі піддаються частотній демодуляції для одержання вихідного аудюсигнала І, Q сигнали надсилаються до індикатора сили прийнятого сигналу ОСПС) і логарифмічного підсилювача 205 (фіг 2) Ця схема вимірює потужність прийнятого сигналу Крім того, оскільки АРП номінальне відтворює експоненціальну залежність коефіцієнта підсилення (тобто "децибельно лінійну", а саме якщо зміна керуючої напруги, що дорівнює X вольт, викликає зміну коефіцієнта підсилення на УдБ, то зміна керуючої напруги, що дорівнює 2Х вольт, викликає зміну коефіцієнта підсилення на 2УдБ), вхідний сигнал до інтегратора 210 згідно з винаходом має бути логарифмічним для того, щоб константа часу контуру АРП була узгодженою у всьому динамічному діапазоні Функцією ICDC і логарифмичного підсилювача 205, таким чином, є одержання логарифму значення ІСПС і віднімання логарифма значення бажаного рівня сигналу Таким чином, вихідний сигнал логарифмичного підсилювача буде позитивним для вхідних сигналів, що перевищують бажаний, і негативним у протилежному випадку Сигнал різниці надсилається до інтегратора 210 Більш детально ІСПС і логарифмічний підсилювач 205 наведено на фіг 3 Схема містить мультиплексор 305, до входів котрого надходять сигнали І, Q Тактовий сигнал спричиняє чергування сигналів і, Q, і, отже, ЮПС виробляє середнє компонентів І, Q Оскільки сигнали у системі з ПДКУ є гаусівськими, для вимірювання потужності сигналу усереднювання сигналів і, Q має виконуватись на багатьох примірниках Схема 310 визначення абсолютного значення і інтегруючий і перетворюючий у десятичну форму вихідний фільтр 315 нижніх частот (ФНЧ) разом визначають середні значення сигналів І, Q на зумовленому інтервалі часу У бажаному втіленні (для систем з ПДКУ у США, де швидкість передачі елементів коду дорівнює 1,2288МГц) цей інтервал дорівнює періоду тактових імпульсів 38,4кГц, протягом якого усереднюються 64 примірники Тактові 38,4кГц імпульси очищують фільтр 315 до нуля після усереднення кожної групи з 64 примірників Фільтр 315 синхро 10 нізується тактовими імпульсами частоти, що удвічі перевищують частоту тактових імпульсів для мультиплексора 305 ВИХІДНІ сигнали ФНЧ 315 використовуються для адресації ПЗП, яка містить логарифмічну таблицю 320, де зберігаються значення, що відповідають різницям між одержаними і еталонними значеннями ІСПС Еталонне значення ІСПС це бажаний рівень сигналів, що приймаються системою Значення, що зберігаються у таблиці 320, піддаються додатковому коригуванню для одержання логарифмічних значень ІСПС і логарифмічний підсилювач 205 обробляють 38400 примірників за сек У бажаному втіленні ВИХІДНІ сигнали мають динамічний діапазон ± 15дБ кроками 0,234дБ на найменш значущий біт Слід відзначити, що динамічний діапазон ІСПС і логарифмічного підсилювача згідно з винаходом мають перевершувати динамічний діапазон АЦП, від якого до них надходить вхідний сигнал У цій схемі використовується гаусівська природа прямого зв'язку системи з ПДКУ ПЗУ 320 не тільки реалізує логарифмічну функцію для вхідних сигналів поблизу центру динамічного діапазону, але й компенсує зріз гаусівського розподілу на кінцях динамічного діапазону Сигнал ІСПС надходить до інтегратора 210 коефіцієнта підсилення контуру Вихід інтегратора 210 встановлюється на рівні, що примушує вихідний сигнал приймального підсилювача з АРП дорівнювати еталонному Програмований інтегратор 210, що відповідає винаходу, більш детально зображений на фіг 4 Від має у складі перемножувач 405, який перемножує значення ІСПС на константу коефіцієнта підсилення Змінюючи ЦЮ константу в залежності від обставин, можна змінювати константу часу повного контуру АРП У бажаному втіленні ця константа програмне уводиться у інтегратор під час виготовлення радютелефона або іншого приладу, у якому застосовано винахід Константа коефіцієнта підсилення визначається експериментальне і залежить від затримки у РЧ схемах Для смугового фільтру контуру константа часу встановлюється якнайшвидшою Уповільнення константи часу занадто уповільнює реакцію, а занадто швидка константа часу спричиняє небажані коливання Вихід перемножувача 403 надходить до 16бітового накопичувача 410 з насиченням Цей накопичувач додає кожний новий примірник, що надходить, до попереднього значення вихідного сигналу Однак, він входить у насичення, а не виконує циклічного зсуву, коли суматор виробляє біт переносу Дані для керування передавальним підсилювачем з АРП надходять від інтегратора 210 до рекурсивного ФНЧ 215 першого порядку Цей фільтр у бажаному втіленні має константу часу 26,7мс Мікропроцесор радіотелефону згідно з винаходом одержує сигнали до і після ФНЧ 215 Сигнал перед ФНЧ 215 несе для мікропроцесора інформацію проте, який саме регулюючий сигнал керує приймальною системою АРП Сигнал після ФНЧ інформує мікропроцесор, який саме регулюючий 12 11 48985 сигнал керує передавальною системою АРМ 225 генерує для передавальної системи АРМ 9бітове вихідне керуюче слово, яке являє собою Сигнал, що пройшов через ФНЧ, надходить до найкращу апроксимацію керуючого слова, що відсуматора 270, який складає цей сигнал з керуючим повідає бажаному рівню вихідної потужності сигналом для замкненого контуру керування потужністю, що надходить від базової станції, з якою Більш детально лінеаризатор 225 наведено на радіо має зв'язок Цей керуючий сигнал несе кофіг 6 Він функціонує як вибіркова таблиця Але, манду радіотелефону підвищити або знизити його оскільки безпосередній варіант вимагає 1024 завихідну потужність в залежності від сигналу, приписів, у бажаному втіленні передбачено дві невейнятого базовою станцією Ця команда від базової ликі вибіркові таблиці і застосування лінійної інстанції є вхідним сигналом схеми 265 замкненого терполяції Це спрощує схему і зменшує об'єм контуру керування потужністю калібраційних даних, що мають зберігатися у радіотелефоні Лінеаризатор 225 має дві таблиці, Перед операцією складання команда керуванзаписані у пам'ять з довільним доступом (RAM) У ня потужністю, що надійшла від базової станції, одній з таблиць міститься крутизна 610, у другій піддається коригуванню константою і операції 260 зсув 605 Для адресації у RAM таблицях 605, 610 додання знаку Ця операція змінює команду керувикористовуються чотири старших біти вхідного вання потужністю у замкненому контурі, що надхорегулюючого сигналу системи АРП Обидві таблидить від схеми 265 замкненого контуру керування ці 605, 610 мають формат 1 6 x 8 потужності, таким чином, щоб одержати належний розмір кроку Для радіотелефонів з ПДКУ у США Фіг 7 містить графік, що ілюструє використання кожний біт команди керування потужності, що надцих таблиць По осі х відкладену бажану потужходить від базової станції, відповідає ± 1дБ У баність, по осі у - регулюючу напругу АРП Відрізок жаному втіленні це відповідає множенню на 12 і, 710 осі бажаних потужностей ідентифікується чотаким чином, вихід інтегратора 210 має вагу тирма старшими бітами вхідного слова ВІДПОВІД0,083дБ/біт У інших втіленнях для підвищення НИЙ ВИХІДНИЙ сегмент 715 має крутизну і зсув, вигнучкості ця константа може визначатись програмтягнуті з двох RAM таблиць ВІДПОВІДНО ДО 4 не старших бітів вхідного слова Множення значення крутизни, одержаного з Масштабований сигнал керування потужністю і відповідної вибіркової таблиці, на 6 молодших бітів сигнал від ФНЧ складаються і результат надходає 9-бітове слово Складання результату з 8 бідить до обмежувача 220 потужності Обмеження тами даних про зсув, одержаних з відповідної випотужності необхідне для того, щоб передавальбіркової таблиці, дає 9-бітовий вихід ний підсилювач потужності не перевершив припустимої межі, і здійснюється шляхом стеження за Дані від передавального лінеаризатора надтим, наскільки цей підсилювач збільшить коефіціходять до частотно-імпульсного модулятора (ЧІП) єнт підсилення після одержання відповідної коЦАП 230 ЦАП 230 перетворює цифровий сигнал у манди аналоговий для використання у регулюючому вході передавального підсилювача з АРП згідно з виЗгідно З винаходом, припустимий рівень вихіднаходом (фіг 2) У бажаному втіленні ЦАП 230 ної потужності цього підсилювача встановлюється працює з тактовою частотою 9,8304МГц на стадії його виготовлення Це значення відоме обмежувачу потужності Значення коефіцієнта Сигнал від обмежувача 220 потужності також підсилення, яке відповідає максимальній ВИХІДНІЙ надходить до схеми 250 керування динамічним потужності може зберігатись у схемі обмежувача діапазоном підсилювача потужності (далі потужності або може бути записане туди мікроКДДПП) Схема 250 КДДПП являє собою сукуппроцесором за допомогою ВІДПОВІДНОГО програмність шести компараторів, пов'язаних з кодуючим ного забезпечення пристроєм пріоритету з гістерезисом Рівень регулювання передавального АРП порівнюється з різУ певних випадках, наприклад, коли радіотеними рівнями потужності, щоб встановлювати у лефон знаходиться за перешкодою, базова станпередавальному підсилювачі потужності чотири ція може передавати до радютелефона багато різні динамічні діапазони вихідної потужності Кекоманд на підвищення потужності Коли внаслідок рування динамічним діапазоном підсилювача поприйому цих команд вихід підсилювача потужності тужності закодовано двобітним вихідним сигналом, досягає припустимого максимуму, обмежувач поякий може бути використаний підсилювачем потутужності надсилає до замкненого контуру керуванжності, наприклад, для обрання належного струму ня потужністю інструкцію ігнорувати подальші козсуву У іншому варіанті вихід схеми КДДПП може манди на підвищення потужності Це не дозволяє бути використаний для обрання одного з кількох підсилювачу потужності перевершити припустиме підсилювачів потужності, оптимізованих для обзначення вихідної потужності, але призводить до меженого динамічного діапазону спотворень сигналу, що передається Команди на зниження потужності виконуються замкненим конСхема КДДПП, наведена більш детально на туром керування потужністю нормально фіг 8, має у складі шість різних регістрів 801 - 806, у які мікропроцесор записує бажані пороги підйому Сигнал від схеми 220 обмеження потужності і зменшення для регулюючого сигналу передаванадсилається до передавального лінеаризатора льної системи АРП Якщо, наприклад, потрібний 225 Цей лінеаризатор компенсує нелінійності, які динамічний діапазон регулюючого сигналу перевиникають у передавальному підсилювачі з АРП, давального підсилювача потужності дорівнює коли той піддається регулюванню Ці нелінійності 18дБм (тобто на рівні 1мВт), поріг підйому може збільшують помилки у рівні вихідної потужності бути встановлений на рівні 19дБм, а поріг зменпередавача Якщо бажаний вихідний рівень решення на рівні 17дБм, що дає гістерезис 2дБ презентується 10-бітовим словом, лінеаризатор 14 13 48985 У бажаному втіленні регулюючий сигнал перекомпаратор регістру 1 падіння виконує перевірку давальної системи АРП порівнюється з цими поро940, у іншому разі, якщо кодуючий пристрій має говими значеннями, і компаратори 820 - 825 форлогічний стан 00 (945), стан кодуючого пристрою мують логічну " 1 " , коли регулюючий сигнал не змінюється Якщо логічний стан кодуючого приперевершує поріг Кодуючий пристрій пріоритету строю не 00, він набирає логічного стану 01 Якщо 830 потім закодовує результати порівняння двобікомпаратор регістру 1 падіння не в логічному стані тним словом керування підсилювачем потужності 1, логічний вихід кодуючого пристрою встановлюється рівним 00, і це означає, що регулюючий сигУ простому кодуючому пристрої пріоритету гіснал передавальної системи АРП знаходиться у терезис не використовується, тому для визначенмежах між мінімальною можливою потужністю і ня чотирьох динамічних діапазонів потрібні лише З рівнем, визначеним першою парою регістрів компаратори Логічний вихід складатиме 11, якщо (вихід > поріг 3), 10, якщо (вихід > поріг 2) AND Коли динамічний діапазон потужності підси(вихід поріг 1) AND лювача потужності змінюється, може змінитись (вихід < поріг 2), і 00, якщо (вхід ~ X J : D Q 1 ISjtilll ШІСІР 1 1 I I p n p.1' А 7 Рівень техніки *ч: , 1 ^ HM A a эсрй ИШКЙІІЇЕІ ФІГ. 1 н 205 /-265 s~ 210 •610 ^260 ni p t n u ФІГ. 6 її-1 l ікдїі НВ-І № H Щ Mill! «wpsscii 'ЛІІЕШПІ 1 HWil 4 -225 -250 "Г ФІГ. 5 605 ' \»c, { ФІГ. 2 Т 19 48985 20 f Ґ VI t_i_3 CSI HO = г „т т т J Ф1Г.8 Фїг. 9 ,13 -05 ЩЖЇІПІІІ ВЁРШРШЧ її 104S шиш tmtmi !л и Щ) тшіШ ІЕМЯД. аншіш! ЇЕНТВІРІВИ ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital device for automatic gain control for providing a linear characteristic and a method of automatic gain control by using the proposed method
Назва патенту російськоюЦифровое устройство для автоматической регулировки усиления для формирования линейной характеристики и способ автоматической регулировки усиления с помощью предлагаемого устройства
МПК / Мітки
Мітки: лінеаризований, керуючий, арп, підсилення, лінеаризованого, регулювання, автоматичного, спосіб, цифровий, цифрового, пристрій
Код посилання
<a href="https://ua.patents.su/10-48985-linearizovanijj-cifrovijj-keruyuchijj-pristrijj-dlya-avtomatichnogo-regulyuvannya-pidsilennya-arp-i-sposib-linearizovanogo-cifrovogo-arp.html" target="_blank" rel="follow" title="База патентів України">Лінеаризований цифровий керуючий пристрій для автоматичного регулювання підсилення (арп) і спосіб лінеаризованого цифрового арп</a>
Спосіб підсилення амплітудно-модульованих та фазоманіпульованих сигналів та пристрій для його здійснення
Номер патенту: 30592
Опубліковано: 15.01.2002
Автор: СИНЕЛЬНИК ОЛЕКСАНДР ІВАНОВИЧ
Мітки: спосіб, сигналів, пристрій, здійснення, фазоманіпульованих, підсилення, амплітудно-модульованих
Формула / Реферат:
1. Спосіб підсилення амплітудно-модульованих та фазоманіпульованих сигналів, здійснюваний в електричному колі, яке містить керований двополюсник повного імпедансу, залежність між вхідним діянням та вихідним сигналом близька до залежності між напругою та струмом у вказаному двополюснику, залежністю між напругою та струмом керують за допомогою сигналу керування, який містить частоту, що дорівнює подвійній несучій сигналу, фаза несучої сигналу...
Спосіб підсилення амплітудно-модульованих та фазо-маніпульованих сигналів та пристрій для його здійснення
Номер патенту: 30592
Опубліковано: 15.12.2000
Автор: СИНЕЛЬНИК ОЛЕКСАНДР ІВАНОВИЧ
Мітки: пристрій, амплітудно-модульованих, підсилення, здійснення, спосіб, фазо-маніпульованих, сигналів
Формула / Реферат:
1. Спосіб підсилення амплітудно-модульованих та фазоманіпульованих сигналів, здійснюваний в електричному колі, яке містить керований двополюсник повного імпедансу, залежність між вхідним діянням та вихідним сигналом близька до залежності між напругою та струмом у вказаному двополюснику, залежністю між напругою та струмом керують за допомогою сигналу керування, який містить частоту, що дорівнює подвійній несучій сигналу, фаза несучої сигналу...
Спосіб підсилення рівня електричного сигналу
Номер патенту: 43400
Опубліковано: 17.12.2001
Автор: Костирко Леонід Миколайович
Мітки: сигналу, рівня, електричного, спосіб, підсилення
Формула / Реферат:
1. Спосіб підсилення рівня електричного сигналу з можливістю регулювання рівня в межах від найменшого до найбільшого значення, який складається з регулювання рівня електричного сигналу, наступного двотактного підсилення рівня електричного сигналу та передачі підсиленого електричного сигналу до навантаження, який відрізняється тим, що після регулювання рівня електричного сигналу до зони найменшого рівня сигнал підсилюють додатковою операцією...
Пристрій для автоматичного регулювання електричного режиму трифазної дугової електропечі
Номер патенту: 6810
Опубліковано: 29.12.1994
Автори: Паранчук Ярослав Степанович, Ізаак Корнєй Іванович, Лозинський Орест Юліанович, Сметанюк Ярослав Богданович, Костинюк Лев Дмитрович, Марущак Ярослав Юрієвич, Бабічев Алєксєй Константіновіч
МПК: H05B 7/148
Мітки: регулювання, електропечі, електричного, трифазної, режиму, пристрій, автоматичного, дугової
Формула / Реферат:
(57) Устройство для автоматического регулирования электрического режима трехфазной дуговой электропечи, содержащее в цепи управления каждой фазы датчик эффективного значения тока, блок задания уставки тока, датчик эффективного значения фазного напряжения и датчик эффективного значения напряжения дуги, блок сравнения, первый вход которого соединен с выходом датчика эффективного значения напряжения дуги, а выход соединен с задатчиком мощности...
Спосіб визначення похибок датчиків систем автоматичного регулювання параметрів технологічних процесів та пристрій для його здійснення
Номер патенту: 18197
Опубліковано: 01.07.1997
Автори: Дубровний Віктор Опанасович, Шевченко Костянтин Леонідович, Скрипник Юрій Олексійович
МПК: G05B 23/00
Мітки: датчиків, параметрів, автоматичного, здійснення, процесів, систем, регулювання, технологічних, похибок, пристрій, визначення, спосіб
Формула / Реферат:
1. Способ определения погрешностей датчиков систем автоматического регулирования параметров технологических процессов, заключающийся в том, что задатчиком устанавливают требуемое значение параметра технологического процесса, изменяют выходной сигнал датчика несколько раз, меняя соответствующим образом измеряемый параметр технологического процесса и вычисляют погрешности датчика по значениям калиброванных воздействий на выходной сигнал...
Попередній патент: Система гральних пристроїв
Наступний патент: Препарат для лікування серцево-судинних захворювань’кардіофіт”
Випадковий патент: Трос дистанційного керування