Комплексний пілотажний тренажер екіпажу вертольота
Номер патенту: 80606
Опубліковано: 10.06.2013
Автори: Лушніченко Володимир Миколайович, Казєєв Євгеній Івановіч, Матвієвський Микола Олександрович, Удовенко Володимир Олексійович, Матвієвський Олександр Миколайович
Формула / Реферат
1. Комплексний пілотажний тренажер екіпажу вертольота, що містить змонтований на системі рухливості імітатор кабіни екіпажу вертольота (І) з розміщеними усередині нього імітаторами приладів, індикаторів та органів керування, систему проекційної візуалізації закабінної обстановки (V) з блоком проекторів (34) зі стаціонарним сферичним екраном проекції (35), всередині якого розміщено імітатор кабіни екіпажу вертольота (І), робоче місце інструктора (VI) з програмно-обчислювальним комплексом, а також локальну обчислювальну мережу (ЛОМ) і мережеві пристрої, який відрізняється тим, що як системи рухливості комплексного пілотажного тренажера екіпажу вертольота тренажер містить три послідовно встановлені одна на одній електромеханічні платформи у вигляді вібраційної платформи (II), динамічної платформи (III) і платформи кругового обертання (IV), вібраційна платформа (II) виконана з можливістю реалізації трьох ступенів свободи і із забезпеченням вібрації імітатора кабіни екіпажу (І) по поперечній, поздовжній і вертикальній осях, динамічна платформа (III) виконана у вигляді шестиступеневої платформи із забезпеченням імітації акселеративних навантажень при зміні кутів крену, курсу і тангажа, а також при лінійних зсувах імітатора кабіни екіпажу (І) уздовж вертикальної, поздовжньої і поперечної осях, платформа кругового обертання (IV) виконана у вигляді жорстко прикріпленого до основи приміщення, в якому монтується тренажер, погона кругового обертання з обертовим контактним пристроєм, виконаним з можливістю передачі електроживлення на власний привід, на приводи динамічної платформи (III) і вібраційної платформи (II), а також в імітатор кабіни екіпажу (І), в імітаторі кабіни екіпажу вертольота (І) розташовані імітатори панелей з автоматами захисту мережі (АЗМ), які виконані з модулями керованої імітації спрацьовування штатних АЗМ у залежності від введених перед початком і в ході тренування несправностей у захищуваних електромережах вертольота, а система проекційної візуалізації закабінної обстановки виконана у вигляді стаціонарного сферичного екрана зворотної проекції (35) і проекторів (34), розташованих назовні щодо цього екрану (35).
2. Комплексний пілотажний тренажер за п. 1, який відрізняється тим, що робоче місце інструктора (VI) містить програмно-апаратні засоби, які містять програмовані логічні інтегральні схеми (ПЛІС), що підтримують "зашиття" алгоритмів задання умов і реалізації різних сценаріїв тренувань, об'єктивного контролю і оцінки дій учнів, діагностики і моніторингу технічного стану тренажера, а також імітації різних несправностей і збоїв функціонування бортових систем вертольота, при цьому в імітаторі кабіни екіпажу вертольота (І) змонтовані імітатори панелей з керованими АЗМ (4), з'єднані з ЛОМ (55), цифровою мережею передачі даних усередині імітатора кабіни екіпажу (19) і пристроєм сполучення (8), причому АЗМ (4) виконані у вигляді штатних АЗМ імітованого типу вертольота з найменшим номінальним значенням струму спрацьовування.
3. Комплексний пілотажний тренажер за п. 1, який відрізняється тим, що стаціонарний сферичний екран зворотної проекції (35) виконаний у вигляді прозорої зрізаної в основі сфери, із зовнішнього боку якої наклеєна плівка зворотної проекції, з діаметром, що забезпечує безперешкодні переміщення імітатора кабіни екіпажу вертольота (І) всередині цієї сфери, при цьому динамічна платформа (III) виконана у вигляді шестиступеневої платформи за схемою Стюарта.
Текст
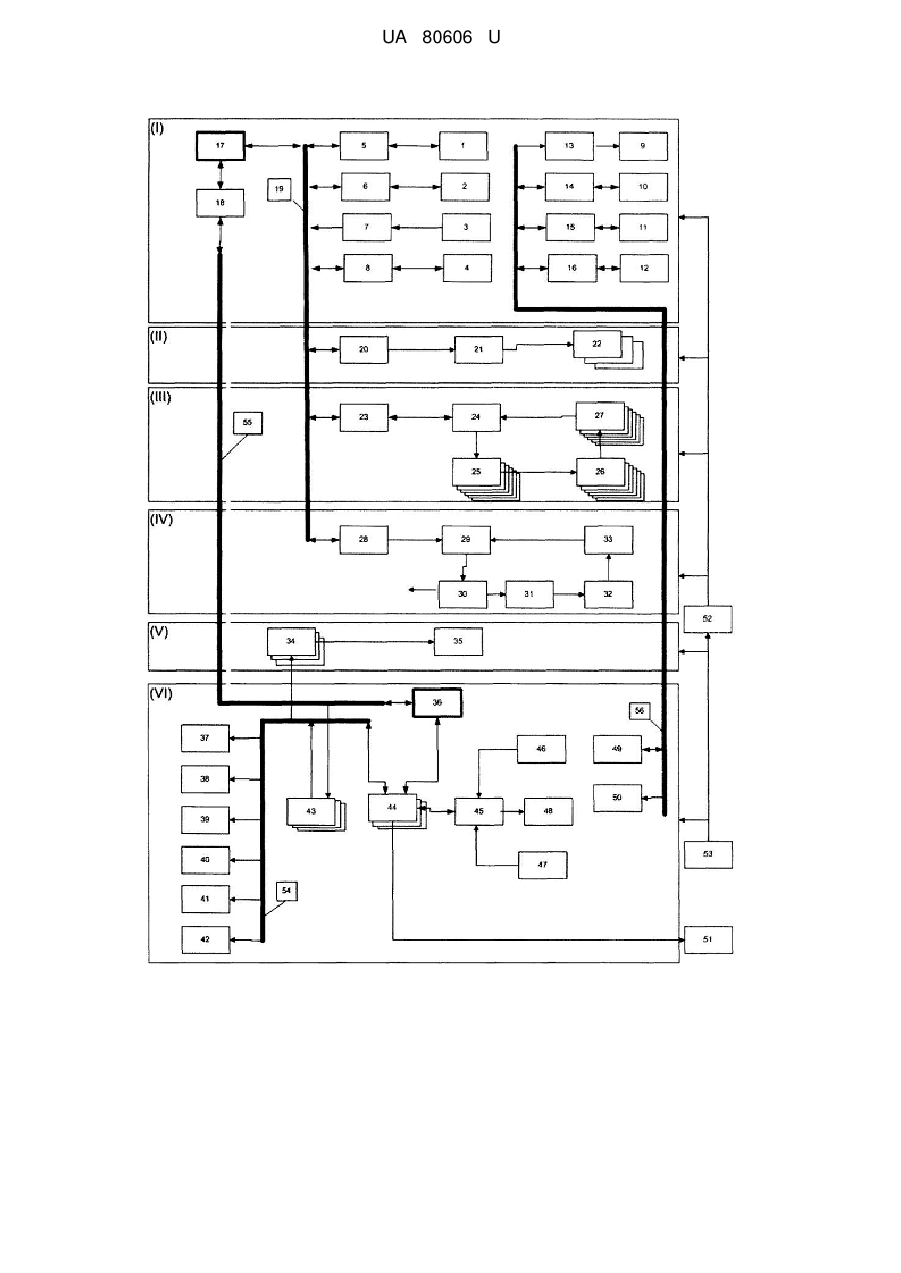
Реферат: Комплексний пілотажний тренажер екіпажу вертольота містить змонтований на системі рухливості імітатор кабіни екіпажу вертольота (І) з розміщеними усередині нього імітаторами приладів, індикаторів та органів керування, систему проекційної візуалізації закабінної обстановки з блоком проекторів зі стаціонарним сферичним екраном проекції. всередині якого розміщено імітатор кабіни екіпажу вертольота (І), робоче місце інструктора (VI) з програмнообчислювальним комплексом, а також локальну обчислювальну мережу (ЛОМ) і мережеві пристрої. Системи рухливості комплексного пілотажного тренажера екіпажу вертольота тренажер містить три послідовно встановлені одна на одній електромеханічні платформи у вигляді вібраційної платформи (II), динамічної платформи (III) і платформи кругового обертання (IV). UA 80606 U (12) UA 80606 U UA 80606 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до автоматизованих технічних засобів, призначених для навчання і тренування членів екіпажів вертольотів, наприклад, типу Мі-8МТВ-1 (Мі-17-1В), діям в обсязі їх функціональних обов'язків з пілотування, навігації та експлуатації бортових систем і устаткування вертольота, комунікативної діяльності, ефективній взаємодії в складі екіпажу, в тому числі і при наявності відмов, несправностей і в особливих випадках, відповідно до Керівництва з льотної експлуатації конкретного типу вертольота. Відома інтерактивна автоматизована система імітаційного моделювання у вигляді багатофункціонального тренажера, призначеного для навчання і підготовки екіпажів вертольотів типу Мі-8, що містить локальну обчислювальну мережу (далі - ЛОМ), уніфіковане робоче місце інструктора, комплекс уніфікованих робочих місць учнів, екран колективного користування, пристрій введення польотної інформації та базу даних сценаріїв тренувань. Тренажер містить програмні модулі реалізації сценаріїв тренувань, об'єктивного контролю дій учнів і об'єктивного контролю дій інструктора [1]. Головним недоліком зазначеного багатофункціонального тренажера екіпажів вертольотів типу Мі-8 є низька реалістичність створюваних умов тренувань, оскільки з його допомогою можливо впливати лише на тактильні (через органи управління), слухові - (аудіо, за допомогою акустичних пристроїв) і візуальні (через екран колективного користування) канали сприйняття учнів. Як найбільш близького прототип вибраний вертолітний навчально-тренувальний комплекс для підготовки екіпажів вертольотів типу Мі-8МТВ [2], до складу якого входить комплексний тренажер, який включає кабіну екіпажу вертольота (з робочими місцями членів екіпажу, оснащену імітаторами індикаторів роботи силової установки, систем і обладнання вертольота, реальними органами управління), імітатор акустичних шумів, робоче місце інструктора з системою відеоспостереження, імітатор візуального оточення і цифровий обчислювальний комплекс, що містить модельний комп'ютер, комп'ютер інструктора, комп'ютер імітації акустичних шумів, комп'ютери та проектори системи візуалізації закабінної обстановки, з'єднані між собою в локальну обчислювальну мережу, а також стаціонарний екран прямої проекції у вигляді сегмента сфери. Недоліками відомого найбільш близького аналога є: відсутність системи рухливості імітатора кабіни екіпажу для імітації акселераційних навантажень, що виникають при русі вертольота на землі і в повітрі; відсутність системи імітації вібрацій, що впливають на членів екіпажу вертольота при різних режимах роботи систем вертольота в різних умовах польоту; неможливість імітації кругового обертання імітатора кабіни екіпажу вертольота, відсутність імітації спрацьовування автоматів захисту мереж (АЗМ) вертольота при несправностях в його електричних мережах. Зазначені недоліки істотно знижують ефективність проведених з його допомогою тренувань, оскільки на вертолітних тренажерах без правильної імітації акселераційних ефектів, вібрацій і кругових обертань імітатора кабіни, а також без імітації спрацьовувань АЗМ неможливо створити для учнів екіпажів досить реалістичний динамічний зворотний зв'язок з працюючими бортовим устаткуванням, двигунами і гвинтами, що критично важливий для правильного управління вертольотом. Крім того, у найбільш близькому аналогу відсутній модуль автоматизованої діагностики технічного стану тренажера з дисплеєм для відображення результатів технічної діагностики і поточного технічного стану тренажера, які б забезпечували максимальне скорочення часу на пошук і локалізацію технічних несправностей і, тим самим, сприяли б підвищенню інтенсивності використання тренажера за призначенням. Задачею пропонованого технічного рішення є створення комплексного пілотажного тренажера екіпажу вертольота (далі - тренажера), призначеного для навчання і тренування членів екіпажів вертольотів в обсязі їх функціональних обов'язків з пілотування, навігації та експлуатації бортових систем і устаткування вертольота (відповідного типу, модифікації та серії), комунікативної діяльності та взаємодії у складі екіпажу (особливо за наявності відмов і несправностей, в особливих випадках і в аварійних ситуаціях) шляхом введення до його складу нових елементів і встановлення ефективного взаємозв'язку між всіма елементами тренажера, що буде сприяти підвищенню реалістичності створюваних умов тренувань і, відповідно, прищеплення членам екіпажів вертольотів більш правильних (адекватних) навичок дій, особливо, в нештатних ситуаціях. Вказана задача вирішується тим, що в комплексному пілотажному тренажері екіпажу вертольота, що містить змонтований на системі рухливості імітатор кабіни екіпажу вертольота (І) з розміщеними усередині нього імітаторами приладів, індикаторів та органів керування, систему проекційної візуалізації закабінної обстановки (V) з блоком проекторів (34) зі 1 UA 80606 U 5 10 15 20 25 30 35 40 45 50 55 60 стаціонарним сферичним екраном проекції (35), всередині якого розміщено імітатор кабіни екіпажу вертольота (І), робоче місце інструктора (VI) з програмно-обчислювальним комплексом, а також локальну обчислювальну мережу (ЛОМ) і мережеві пристрої, новим є те, що, як системи рухливості комплексного пілотажного тренажера екіпажу вертольота тренажер містить три послідовно встановлені одна на одній електромеханічні платформи у вигляді вібраційної платформи (II), динамічної платформи (III) і платформи кругового обертання (IV), вібраційна платформа (II) виконана з можливістю реалізації трьох ступенів свободи і із забезпеченням вібрації імітатора кабіни екіпажу (І) по поперечній, поздовжній і вертикальній осях, динамічна платформа (III) виконана у вигляді шестиступеневої платформи із забезпеченням імітації акселеративному навантажень при зміні кутів крену, курсу і тангажа, а також при лінійних зсувах імітатора кабіни екіпажу (І) уздовж вертикальної, поздовжньої і поперечної осях, платформа кругового обертання (IV) виконана у вигляді жорстко прикріпленого до основи приміщення, в якому монтується тренажер, погона кругового обертання з обертовим контактним пристроєм, виконаним з можливістю передачі електроживлення на власний привід, на приводи динамічної платформи (III) і вібраційної платформи (II), а також в імітатор кабіни екіпажу (І), в імітаторі кабіни екіпажу вертольота (І) розташовані імітатори панелей з автоматами захисту мережі (АЗМ), які виконані з модулями керованої імітації спрацьовування штатних АЗМ у залежності від вводимих перед початком і в ході тренування несправностей у захищуваних електромережах вертольота, а система проекційної візуалізації закабінної обстановки виконана у вигляді стаціонарного сферичного екрана зворотної проекції (35) і проекторів (34), розташованих назовні щодо цього екрану (35). Робоче місце інструктора (VI) містить програмно-апаратні засоби, які містять програмовані логічні інтегральні схеми (ПЛІС), що підтримують "зашиття" алгоритмів задання умов і реалізації різних сценаріїв тренувань, об'єктивного контролю і оцінки дій учнів, діагностики і моніторингу технічного стану тренажера, а також імітації різних несправностей і збоїв функціонування бортових систем вертольота. В імітаторі кабіни екіпажу вертольота (І) змонтовані імітатори панелей з керованими АЗМ (4), з'єднані з ЛОМ (55), цифровою мережею передачі даних усередині імітатора кабіни екіпажу (19) і пристроєм сполучення (8), причому АЗМ (4) виконані у вигляді штатних АЗМ імітованого типу вертольота з найменшим номінальним значенням струму спрацьовування. Стаціонарний сферичний екран зворотної проекції (35) виконаний у вигляді прозорої зрізаної в основі сфери, із зовнішнього боку якої наклеєна плівка зворотної проекції, з діаметром, що забезпечує безперешкодні переміщення імітатора кабіни екіпажу вертольота (І) всередині цієї сфери. Динамічна платформа (III) виконана у вигляді шестиступеневої платформи за схемою Стюарта. Вищеперелічені ознаки складають суть заявленого технічного рішення. Наявність причинно-наслідного зв'язку між сукупністю суттєвих ознак заявленого технічного рішення і технічним результатом, що досягається, полягає в наступному. Особливістю структури і функціонування розробленого тренажера, який містить в собі робоче місце інструктора (з програмно-обчислювальним комплексом, програмованими логічними інтегральними схемами (ПЛІС), різними базами даних і спеціальним програмним забезпеченням, засобами службового зв'язку і імітованого радіозв'язку з учнями, модулями діагностики технічного стану тренажера і об'єктивного контролю дій учнів), імітатор кабіни екіпажу вертольота (з імітаторами кабінного обладнання, які за зовнішнім виглядом та розташуванням не відрізняються від штатних приладів, індикаторів та органів керування в кабіні екіпажу вертольота конкретного типу, модифікації та серії), розміщений на системі рухливості (що складається з триступеневої вібраційної платформи, до якої кріпиться імітатор кабіни екіпажу; шестиступеневої динамічної платформи, на якій через демпфіруючі вставки встановлена вібраційна платформа, платформи кругового обертання, до якої жорстко прикріплено основу шестиступеневої динамічної платформи), систему візуалізації закабінної обстановки (включає проектори та стаціонарний сферичний екран зворотної проекції, виготовлений у вигляді сфери, зрізаної в основі таким чином, щоб усередині сфери забезпечувалися безперешкодні переміщення імітатора кабіни екіпажу вертольота при максимальних ходах шестиступеневої динамічної платформи і при будь-якій орієнтації кабіни в просторі), мережеве обладнання тренажера, є наступне: - реалізована адекватна імітація акселеративному навантажень по крену, курсом і тангажу, а також забезпечено обертання імітатора кабіни екіпажу вертольота вкругову без обмежень, що істотно підвищує реалістичність тренувань по управлінню вертольотом, особливо при наявності відмов, несправностей, особливих випадків та аварійних ситуацій; 2 UA 80606 U 5 10 15 20 25 30 35 40 45 50 55 - забезпечена можливість імітації вібрацій гелікоптера шляхом керованих переміщень (за допомогою спеціальної вібраційної платформи) імітатора кабіни екіпажу вертольота по вертикальній, поперечної та поздовжньої осях з амплітудами і частотами, відповідними режимам вібрації, що виникають при різних умовах реального польоту вертольота, що критично важливо для правильного навчання вертолітних екіпажів, оскільки штатні і позаштатні (відмова, обмерзання або пошкодження несучих гвинтів) умови польоту визначаються суб'єктивно через частоту і амплітуду вібрацій, що відчуваються; - використана схема розміщення імітатора кабіни екіпажу вертольота, змонтованого на описаній вище системі рухливості, всередині стаціонарного сферичного екрана зворотної проекції, що дозволяє виконувати вправи з розворотом імітатора кабіни екіпажу вертольота вкругову з можливістю одночасної зміни її крену і тангажа, а, отже, з більш широким (ніж у прототипі) оглядом як верхньої, так і нижньої зони віртуального простору, що імітує закабінну обстановку в полі видимості членів екіпажу, без будь-яких затемнень, характерних при використанні прямого проекціювання зсередини сферичного стаціонарного екрану, всередині якого розміщено імітатор кабіни екіпажу вертольота на системі рухливості; - проектори (34) системи візуалізації закабінної обстановки встановлені в розрахункових точках поза сферичного екрану (35), виконаного у вигляді прозорої зрізаної сфери, із зовнішнього боку якої наклеєна плівка зворотної проекції, чим забезпечується постійна кругова проекція (включаючи купол сфери) зображення віртуального оточення, в якому знаходиться вертоліт у процесі тренування; - забезпечена повна імітація роботи АЗМ вертольота шляхом програмно-апаратного управління їх спрацьовуваннями при імітації відповідних ситуацій в роботі захищуваних електричних ланцюгів у приладах і бортових системах вертольота. На фіг.1 показана структура комплексного пілотажного тренажера екіпажу вертольота. Тренажер включає в себе шість (укрупнених) систем (позначені на кресленні римськими цифрами І - VI): імітатор кабіни екіпажу (І), обладнаний панелями, пультами та щитками з програмно керованими АЗМ і розміщений на вібраційній платформі (II), встановленій на динамічній платформі (III), погон кругового обертання (IV), на якому встановлена динамічна платформа, проекційна система (V), а також робоче місце інструктора (VI), а також мережеве обладнання тренажера. У імітаторі кабіни екіпажу (І) розміщені наступні елементи і блоки: 1 - імітатор пілотажнонавігаційних приладів; 2 - імітатор приладів контролю двигуна і окремих систем вертольота; 3 імітатори органів управління вертольотом; 4 - імітатори панелей з керованими АЗМ; 5 - пристрій сполучення пілотажно-навігаційних приладів; 6 - пристрій сполучення приладів контролю двигуна і окремих систем вертольота; 7 - пристрій сполучення органів управління вертольотом; 8 - пристрій сполучення імітаторів панелей (4) з керованими АЗМ; 9 - аудіосистема в імітаторі кабіни екіпажу; 10 - імітатор апаратури внутрішнього зв'язку екіпажу; 11 - апаратура службового зв'язку тренажера; 12 - імітатор апаратури зовнішнього (командного) радіозв'язку; 13 - пристрій сполучення аудіосистеми імітатора кабіни екіпажу; 14 - пристрій сполучення імітатора апаратури внутрішнього зв'язку екіпажу; 15 - пристрій сполучення апаратури службового зв'язку тренажера; 16 - пристрій сполучення імітатора апаратури зовнішнього (командного) радіозв'язку; 17 - системний блок-резидент цифрової мережі імітатора кабіни екіпажу; 18 пристрій сполучення цифрової мережі передачі даних усередині імітатора кабіни екіпажу з ЛОМ тренажера; 19 - цифрова мережа передачі даних усередині імітатора кабіни екіпажу (І). Вібраційна платформа (II) має три ступені свободи і включає: 20 - пристрій сполучення блоку управління вібраційною платформою; 21 - блок управління вібраційною платформою; 22 приводи вібраційної платформи (3 шт.). Динамічна (рухлива) платформа (III), що має шість ступенів свободи, виконана, наприклад, за схемою Стюарта [4], і включає: 23 - пристрій сполучення блоку керування динамічною платформою; 24 - блок керування динамічною платформою; 25 - частотні перетворювачі (у кількості 6 шт.); 26 - приводи динамічної платформи (в кількості 6 шт.); 27 - датчики положення приводів динамічної платформи (в кількості 6 шт.). Платформа кругового обертання (IV), на якій встановлена динамічна платформа, складається з наступних елементів і блоків: 28 - пристрій сполучення блоку управління погоном кругового обертання; 29 - блок управління погоном кругового обертання; 30 - частотний перетворювач; 31 - привід погона кругового обертання; 32 - погон кругового обертання с обертовим контактним пристроєм; 33 - датчик положення приводу погона кругового обертання. Проекційна система візуалізації (V) складається з наступних елементів і блоків: 34 - блок проекторів; 35 - стаціонарний сферичний екран зворотної проекції. 3 UA 80606 U 5 10 15 20 25 30 35 40 45 50 55 У робочому місці інструктора (VI) розміщені: 36 - системний блок-сервер тренажера; 37 дисплей для відображення головного меню інструктора з підменю управління режимами роботи тренажера, введення даних про учнів, підготовки і вибору варіантів вправ, редагування вправ, перегляду електронної карти та тривимірної моделі місцевості, умов тренування, перегляду виконаних вправ; 38 - дисплей для відображення стану та стану органів управління, приладів та індикаторів вертольота; 39 - дисплей для візуального контролю дій учнів всередині імітатора кабіни екіпажу; 40 - дисплей для відображення поточного становища вертольота у віртуальному просторі із зовнішньої камери (з будь-якої висоти і під будь-яким ракурсом); 41 - дисплей для відображення результатів технічної діагностики і поточного технічного стану тренажера, а також для управління несправностями вертолітних систем в ході тренування; 42 - дисплей для управління імітацією зовнішнього зв'язку і управління службової зв'язком з екіпажем; 43 системні блоки - графічні станції системи проекційної візуалізації; 44 - системні блоки з програмними модулями тренажера (ПЛІС); 45 - системний блок керування режимами роботи тренажера; 46 - оптичний маніпулятор; 47 - клавіатура; 48 - принтер; 49 - апаратура зв'язку в робочому місці інструктора; 50 - аудіосистема в робочому місці інструктора. Програмно-апаратні засоби робочого місця інструктора (VI) містять ПЛІС, що підтримують "зашиття" алгоритмів задання умов і реалізації різних сценаріїв тренувань, об'єктивного контролю та оцінки дій учнів, діагностики і моніторингу технічного стану тренажера, а також імітації різних несправностей і збоїв функціонування бортових систем вертольота. До мережевого устаткування тренажера відносяться наступні елементи: 51 - великий екран колективного користування (виконаний у вигляді плазмової панелі, рідкокристалічного монітора або проекційного екрану), призначений для спостереження іншими учнями за ходом виконання поточної вправи, для підведення підсумків заняття та перегляду запису виконання будь-якої вправи; 52 - обертовий контактний пристрій; 53 - система електроживлення тренажера; 54 мережа трактів передачі відеосигналів; 55 -ЛОМ тренажера; 56 - мережа трактів передачі акустичних сигналів. Тренажер використовується наступним чином. Вихідні дані для виконання вправи, введені інструктором зі свого робочого місця за допомогою клавіатури (47) і оптичного маніпулятора (46) в головному меню тренажера на дисплеї (37), підключеному до системного блоку керування режимами роботи тренажера (45), передаються по ЛОМ тренажера (55) на системний блок - сервер тренажера (36). За допомогою останнього розраховується траса польоту, швидкість і прискорення, нахили вертольота, висота польоту над землею, визначається положення всіх об'єктів, розраховуються результати взаємодії між різними об'єктами, земною та водною поверхнею у віртуальному просторі. Ці дані по ЛОМ тренажера (55) з системного блоку - сервера тренажера (36) передаються на системні блоки - графічні станції тренажера (43), за допомогою яких формуються зображення для проекційної системи візуалізації. Ці зображення передаються по мережі трактів передачі відеосигналів (54) на блок проекторів (34), формують на стаціонарному сферичному екрані (35) кругове зображення віртуального простору, видиме як-би із прозорої кабіни з точки огляду пілота (для одномісних вертольотів) або з компромісної точки огляду, відповідній середині умовного відрізка між очима пілотів (для вертольотів, у яких є можливість пілотування з двох робочих місць). У відповідності зі сценарієм виконуваної вправи інформація і сигнали з системного блоку сервера тренажера (36) по ЛОМ тренажера (55) через радіоканал і пристрій сполучення (18) надходять на системний блок - резидент цифрової мережі імітатора кабіни екіпажу (17), за допомогою якого на основі цієї інформації виробляють і передають по цифровій мережі передачі даних (19) всередині імітатора кабіни екіпажу (І) сигнали на пристрої сполучення (5) (8), (20), (23) і (28). На основі отриманих даних за допомогою пристроїв сполучення (5) - (8), (20), (23) і (28) виробляються команди управління роботою імітатора пілотажно-навігаційних приладів (1), імітатора приладів контролю двигуна і окремих систем вертольота (2), імітатора органів управління вертольотом (3), імітатора панелей з програмно-керованими АЗМ (4), а також для управління платформами (II), (III) та (IV) системи рухливості тренажера (у разі її використання в поточній вправі). Зазначені імітатори приладів і органів управління змінюють поточні показання та положення згідно з імітованими режимами роботи бортових систем вертольота і керуючими впливами учнів членів екіпажу на органи управління вертольота, забезпечують імітацію зовнішнього і внутрішнього зв'язку екіпажу вертольота, а також службовий зв'язок інструктора екіпажу. 4 UA 80606 U 5 10 15 20 25 30 35 40 45 50 55 60 У вібраційній платформі (II) у відповідності з сигналами управління, які надходять від пристрою сполучення (20) за допомогою сигналів, що надходять від блоку управління (21), змінюють амплітуду і частоту напруги живлення трьох електромеханічних приводів (22). У результаті переміщення приводів (22) імітатор кабіни екіпажу вертольота (І) переміщається по вертикальній, поздовжній і поперечній осях з частотою і амплітудою, відповідними імітованій вібрації вертольота. У динамічній платформі (III) у відповідності з сигналами управління, які надходять через пристрій сполучення динамічної платформи (23) на блок управління (24), який через частотні перетворювачі (25) управляють приводами (26) динамічної платформи. Датчики положення приводів (27) контролюють і видають у блок управління (24) як сигнали зворотного зв'язку параметри поточного становища кожного приводу динамічної платформи. У результаті переміщення приводів динамічної платформи імітатор кабіни екіпажу вертольота (І) нахиляється і переміщується всередині сферичного проекційного екрану у відповідності з імітованими прискореннями і нахилами вертольота. З шести приводів динамічної платформи три забезпечують імітацію кутових прискорень вертольота за курсом, крену і тангажа, а інші три - імітацію поздовжніх, поперечних і вертикальних прискорень вертольота в ході тренування. У платформі кругового обертання (IV) у відповідності з сигналами управління, які надходять від пристрою сполучення (28), за допомогою сигналів, що надходять від блоку управління (29), через частотні перетворювачі (30) подаються команди управління на привід погона кругового обертання (31). Привід погона приводить в рух погон кругового обертання (32). Датчик положення приводу (33) контролюють і видають як сигнали зворотного зв'язку параметри поточного становища платформи кругового обертання в блок керування (29). У результаті переміщення погона (32) імітатор кабіни екіпажу вертольота (І) обертається навколо своєї вертикальної осі зі швидкістю, що відповідає імітованому обертанню вертольота або затяжному маневру вертольота за курсом. Відповідно з діями учнів і вводимими з робочого місця інструктора (VI) несправностями систем і приладів вертольота змінюється стан імітатора пілотажно-навігаційних приладів (1), імітатора приладів контролю двигуна і окремих систем (2), імітатора органів управління вертольотом (3), імітатора панелей з програмно-керованими АЗМ (4). Крім того, забезпечується підтримання внутрішнього зовнішнього (командного) і службового зв'язку інструктора з екіпажем. Сигнали від зазначених імітаторів надходять через відповідні пристрої сполучення (5-8) в яких вони обробляються і по цифровій мережі передачі даних (19) передаються на системний блок-резидент (17) імітатора кабіни екіпажу (І), звідки інформація по радіоканалу передається через ЛОМ тренажера (55) в системний блок - сервер тренажера (36) для розрахунку імітованих параметрів руху і внутрішнього стану вертольота на наступному кроці моделювання в ході виконання вправи. Зовнішні та внутрішні шуми і звуки, сформовані системним блоком - сервером тренажера (36), відповідно з імітованими режимами руху вертольота і режимами роботи його бортового обладнання, а також мовні повідомлення, якими обмінюються члени екіпажу по імітуємій системі внутрішнього зв'язку вертольота (і чутні інструкторові), переговори по імітуємій системі зовнішнього зв'язку екіпажу, а також по службовому зв'язку тренажера по мережі передачі акустичних сигналів (56) передаються через пристрої сполучення (13) - (16) в аудіосистему імітатора кабіни екіпажу (9), в імітатор апаратури внутрішнього зв'язку екіпажу (10), в імітатор апаратури зовнішнього (командного) радіозв'язку (12), в апаратуру службового зв'язку тренажера (11) і в апаратуру зв'язку в робочому місці інструктора (49), а також в акустичну систему робочого місця інструктора (50). На етапі підготовки тренування інструктор на своєму робочому місці, з'єднаному з системним блоком (45) керування режимами роботи тренажера, в головному меню за допомогою оптичного маніпулятора (46) на екрані дисплея (37) проводить наступні операції на електронних текстових і графічних документах: а) вибирає тип вправи, час дня, року, погодні умови, тип місцевості. У підменю вибору номера вправи оптичним маніпулятором (46) на екрані дисплея (37) керівник вибирає з бази раніше записаних вправ номер потрібної для даного тренування вправи. У підменю редагування вправ на екрані дисплея (37) інструктор оптичним маніпулятором (46) і за допомогою клавіатури (47) змінює тип і розташування об'єктів на місцевості, їх кількість, колір, час появи, швидкість руху, маршрут і профіль польоту (руху). У підменю умов виконання вправ інструктор вводить погодні умови за допомогою шкал 5 UA 80606 U 5 10 15 20 25 30 35 40 45 50 55 60 температури, швидкості і напряму вітру, тиску повітря, виду та інтенсивності метеоопадів, характеристик хмарності; б) вводить дані про учнів. У підменю введення даних про учнів за допомогою клавіатури (47) інструктор вносить у відповідні поля на екрані дисплея (37) прізвища, імена та по батькові учнів, реквізити організацій або підрозділів, з яких вони прибули. Ці дані використовуються при подальшому виставлянні оцінки, для ведення бази даних учнів, формування звітів та їх друку на принтері (48); в) ставить задання навчуваним. Використовуючи електронну карту місцевості на великому екрані колективного користування (51), інструктор знайомить учнів з умовами виконання вправи, розміщенням об'єктів, оціночними показниками, часом на виконання вправи. Після введення всіх вихідних даних на екрані дисплея (37) у формі електронних текстових і графічних документів, інструктор контролює заняття навчаємими членами екіпажу вертольота зі своїх робочих місць в імітаторі кабіни екіпажу (І) і починає виконання вправи. Динамічна платформа (III) (в разі її використання в ході даного тренування) плавно піднімається в своє нейтральне положення. На сферичному екрані (35) проекційної системи (V), а також на відповідних дисплеях робочого місця інструктора відображаються місцевість, наземні і повітряні об'єкти, видимі з компромісної точки зору всередині імітатора кабіни екіпажу вертольота. Під час виконання вправи інструктора може постійно контролювати на екранах дисплеїв свого робочого місця (VI) загальну працездатність тренажера за станом контрольного індикатора і за повідомленнями програми в головному меню тренажера. Інструктор безперервно контролює дії учнів за допомогою відеотрансляції на екрані дисплея (39) ситуації всередині імітатора кабіни екіпажу, а також по відображенню на екрані дисплея (38) поточного становища приладів і органів управління в імітаторі кабіни екіпажу, а також по положенню вертольота на електронній карті місцевості і в тривимірному віртуальному просторі на екрані дисплея (40). Під час виконання вправи вібраційна платформа (II) (в разі її використання в даній вправі) створює коливання імітатора кабіни екіпажу (І), відповідні імітованим режимам роботи агрегатів і систем вертольота. Блок проекторів (34) створює кругове зображення віртуального простору на сферичному екрані (35). Під час виконання вправи інструктор має можливість за допомогою оптичного маніпулятора (46) і клавіатури (47) давати вступні [3] про несправності приладів і бортових систем вертольота. Учні, що не беруть участі в даному тренуванні, спостерігають на великому екрані колективного користування (51) за діями учнів, що знаходяться в імітаторі кабіни екіпажу (І). Інструктор за допомогою службового зв'язку тренажера звертає увагу на допущені помилки і неправильні дії учнів. Помилки учнів автоматично фіксуються і записуються програмою тренажера. Після завершення вправи, при необхідності, відбувається повторний показ запису виконаної вправи на екрані колективного користування (51), проводиться розбір допущених помилок, оголошується оцінка, яка фіксується в електронній формі в протоколі і роздруковується на принтері (48). У програму тренажера вбудовані модулі, за допомогою яких автоматично фіксуються помилкові дії учнів, що порушують правила керівництв з льотної та технічної експлуатації вертольота (конкретного типу, модифікації та серії), і видаються повідомлення про це інструктору на екранах дисплея (37). У тренажер вбудована мережа електроживлення тренажера (53), яка забезпечує включення і виключення систем тренажера, живлення їх стабілізованою однофазною напругою 220В, 50Гц, безперебійне живлення системних блоків тренажера протягом 10 хвилин після зникнення напруги в зовнішній електромережі. Комплексний пілотажний тренажер екіпажу вертольота, в залежності від потреби, може використовуватися для виконання тренувань як у складі повного екіпажу вертольота, так і в скороченому складі. Даний тренажер можна використовувати також як пілотажний тренувальний пристрій або пілотажно-навігаційний тренажер (без включення системи рухливості і при проектуванні закабінного простору тільки на сегмент сферичного екрану, видимий з нерухомої кабіни екіпажу вертольота) і як процедурний тренажер (без включення систем рухливості і проекційної системи візуалізації закабінного простору). Використання розробленого тренажера дозволяє вирішувати наступні задання: а) відпрацьовування і закріплення навичок використання всього штатного обладнання вертольота; б) початкове навчання та вдосконалення навичок управління вертольотом у польотах над різною місцевістю, в різних умовах метеовідімості і в різних режимах; в) об'єктивну оцінку дій учнів г) моделювання у вправах таких умов польоту і відмов бортових приладів та систем 6 UA 80606 U 5 10 вертольота, які недосяжні іншими методами в реальних навчальних польотах; д) злагодження екіпажів вертольотів в умовах, максимально наближених до реальних польотним умов. Таким чином, підвищення ефективності використання пілотажного тренажера екіпажу вертольота в порівнянні з найближчим аналогом досягається за рахунок забезпечення максимальної реалістичності умов тренувальних польотів та імітацією неможливих в реальних навчальних польотах ситуацій. Апробація тренажера була успішно проведена в київському НВО "Енергія 2000" (Україна) в 2011-2012р.р. і в Алматинському TOO "Алматиенергосервіс" (Республіка Казахстан) в 2012 році. Джерела інформації: 1. Патент RU №2087037, МПК 8 G09B 9/08. Опубл. 10.08.1997, бюл. № 25. 2. Патент UA № 77605, МПК G09B 9/02. Опубл. 15.12.2006, бюл. № 12. 3. Словарь военных терминов (http://military_terms.academic.ru/). 4. D. Stewart, A Platform with Six Degrees of Freedom, UK Institution of Mechanical Engineers Proceedings 1965-66, Vol 180, Pt 1, No 15. 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 40 45 50 55 1. Комплексний пілотажний тренажер екіпажу вертольота, що містить змонтований на системі рухливості імітатор кабіни екіпажу вертольота (І) з розміщеними усередині нього імітаторами приладів, індикаторів та органів керування, систему проекційної візуалізації закабінної обстановки (V) з блоком проекторів (34) зі стаціонарним сферичним екраном проекції (35), всередині якого розміщено імітатор кабіни екіпажу вертольота (І), робоче місце інструктора (VI) з програмно-обчислювальним комплексом, а також локальну обчислювальну мережу (ЛОМ) і мережеві пристрої, який відрізняється тим, що як системи рухливості комплексного пілотажного тренажера екіпажу вертольота тренажер містить три послідовно встановлені одна на одній електромеханічні платформи у вигляді вібраційної платформи (II), динамічної платформи (III) і платформи кругового обертання (IV), вібраційна платформа (II) виконана з можливістю реалізації трьох ступенів свободи і із забезпеченням вібрації імітатора кабіни екіпажу (І) по поперечній, поздовжній і вертикальній осях, динамічна платформа (III) виконана у вигляді шестиступеневої платформи із забезпеченням імітації акселеративних навантажень при зміні кутів крену, курсу і тангажа, а також при лінійних зсувах імітатора кабіни екіпажу (І) уздовж вертикальної, поздовжньої і поперечної осей, платформа кругового обертання (IV) виконана у вигляді жорстко прикріпленого до основи приміщення, в якому монтується тренажер, погона кругового обертання з обертовим контактним пристроєм, виконаним з можливістю передачі електроживлення на власний привід, на приводи динамічної платформи (III) і вібраційної платформи (II), а також в імітатор кабіни екіпажу (І), в імітаторі кабіни екіпажу вертольота (І) розташовані імітатори панелей з автоматами захисту мережі (АЗМ), які виконані з модулями керованої імітації спрацьовування штатних АЗМ у залежності від введених перед початком і в ході тренування несправностей у захищуваних електромережах вертольота, а система проекційної візуалізації закабінної обстановки виконана у вигляді стаціонарного сферичного екрана зворотної проекції (35) і проекторів (34), розташованих назовні щодо цього екрана (35). 2. Комплексний пілотажний тренажер за п. 1, який відрізняється тим, що робоче місце інструктора (VI) містить програмно-апаратні засоби, які містять програмовані логічні інтегральні схеми (ПЛІС), що підтримують "зашиття" алгоритмів задання умов і реалізації різних сценаріїв тренувань, об'єктивного контролю і оцінки дій учнів, діагностики і моніторингу технічного стану тренажера, а також імітації різних несправностей і збоїв функціонування бортових систем вертольота, при цьому в імітаторі кабіни екіпажу вертольота (І) змонтовані імітатори панелей з керованими АЗМ (4), з'єднані з ЛОМ (55), цифровою мережею передачі даних усередині імітатора кабіни екіпажу (19) і пристроєм сполучення (8), причому АЗМ (4) виконані у вигляді штатних АЗМ імітованого типу вертольота з найменшим номінальним значенням струму спрацьовування. 3. Комплексний пілотажний тренажер за п. 1, який відрізняється тим, що стаціонарний сферичний екран зворотної проекції (35) виконаний у вигляді прозорої зрізаної в основі сфери, із зовнішнього боку якої наклеєна плівка зворотної проекції, з діаметром, що забезпечує безперешкодні переміщення імітатора кабіни екіпажу вертольота (І) всередині цієї сфери, при цьому динамічна платформа (III) виконана у вигляді шестиступеневої платформи за схемою Стюарта. 7 UA 80606 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюComplex flight simulator for a helicopter crew
Автори англійськоюMatvievskyi Oleksandr Mykolaiovych, Matvievskyi Mykola Oleksandrovych, Lushnichenko Volodymyr Mykolaiovych, Udovenko Volodymyr oleksiiovych, Kazeiev Yevhenii Ivanovich
Назва патенту російськоюКомплексный пилотажный тренажер экипажа вертолета
Автори російськоюМатвиевский Александр Николаевич, Матвиевский Николай Александрович, Лушниченко Владимир Николаевич, Удовенко Владимир Алексеевич, Казеев Евгений Иванович
МПК / Мітки
МПК: F41G 3/00, G09B 9/00, G09B 9/12, G09B 7/00
Мітки: тренажер, екіпажу, комплексний, вертольота, пілотажний
Код посилання
<a href="https://ua.patents.su/10-80606-kompleksnijj-pilotazhnijj-trenazher-ekipazhu-vertolota.html" target="_blank" rel="follow" title="База патентів України">Комплексний пілотажний тренажер екіпажу вертольота</a>
Комплексний тренажер екіпажу бронетранспортера бтр-80
Номер патенту: 80604
Опубліковано: 10.06.2013
Автори: Казєєв Євгеній Івановіч, Касьян Владімір Івановіч, Матвієвський Олександр Миколайович, Бондаренко Тарас Григорович, Матвієвський Микола Олександрович, Касьян Іван Алєксандровіч
МПК: F41G 3/00, G09B 7/00, G09B 9/00, G09B 9/04
Мітки: бронетранспортера, екіпажу, тренажер, бтр-80, комплексний
Формула / Реферат:
1. Комплексний тренажер екіпажу бронетранспортера БТР-80, що містить розміщену на динамічній платформі систему імітаторів у вигляді імітаторів робочих місць учнів з розміщеними усередині них імітаторами засобів управління, автоматизоване робоче місце (АРМ) керівника занять з програмно-обчислювальним комплексом з програмним забезпеченням (ПЗ), а також систему обміну даними, при цьому елементи тренажера з'єднані між собою через локальну...
Комплексний тренажер екіпажу багатоцільового тягача мтлб з бойовим модулем
Номер патенту: 80605
Опубліковано: 10.06.2013
Автори: Матвієвський Микола Олександрович, Казєєв Євгеній Івановіч, Матвієвський Олександр Миколайович, Касьян Владімір Івановіч, Бондаренко Тарас Григорович, Касьян Іван Александровіч
МПК: G09B 9/04, G09B 7/00, F41G 3/00, G09B 9/00
Мітки: багатоцільового, тягача, бойовим, екіпажу, тренажер, модулем, мтлб, комплексний
Формула / Реферат:
1. Комплексний тренажер екіпажа багатоцільового тягача МТЛБ з бойовим модулем, що містить розміщений на динамічній платформі систему імітаторів у вигляді імітатора кабіни МТЛБ з бойовим модулем з розміщеними усередині нього імітаторами засобів управління, автоматизоване робоче місце (АРМ) керівника занять з програмно-обчислювальним комплексом з програмним забезпеченням (ПЗ), а також систему обміну даними, при цьому елементи тренажера...
Комплексний тренажер екіпажу танка т-72

Номер патенту: 80603
Опубліковано: 10.06.2013
Автори: Касьян Владімір Івановіч, Матвієвський Олександр Миколайович, Касьян Іван Александровіч, Казєєв Євгеній Івановіч, Матвієвський Микола Олександрович, Бондаренко Тарас Григорович
МПК: F41G 3/00, G09B 7/00, G09B 9/04, G09B 9/00
Мітки: т-72, танка, комплексний, тренажер, екіпажу
Формула / Реферат:
1. Комплексний тренажер екіпажу танка Т-72, що містить розміщену на рухомій динамічній платформі систему імітаторів у вигляді імітаторів робочих місць учнів з розміщеними усередині них імітаторами засобів управління, автоматизоване робоче місце (АРМ) керівника занять з програмно-обчислювальним комплексом з програмним забезпеченням (ПЗ), а також систему обміну даними, при цьому елементи тренажера з'єднані між собою через локальну...
Комплексний тренажер екіпажу бойової машини піхоти бмп-2

Номер патенту: 80602
Опубліковано: 10.06.2013
Автори: Бондаренко Тарас Григорович, Матвієвський Олександр Миколайович, Матвієвський Микола Олександрович, Казєєв Євгеній Івановіч, Касьян Іван Александровіч, Касьян Владімір Івановіч
МПК: G09B 9/04, G09B 9/00, F41G 3/00, G09B 7/00
Мітки: комплексний, бмп-2, машини, екіпажу, бойової, тренажер, піхоти
Формула / Реферат:
1. Комплексний тренажер екіпажу бойової машини піхоти БМП-2, що містить розміщену на рухомій динамічній платформі систему імітаторів у вигляді імітаторів робочих місць учнів з розміщеними усередині них імітаторами засобів управління, автоматизоване робоче місце (АРМ) керівника занять з програмно-обчислювальним комплексом з програмним забезпеченням (ПЗ), а також систему обміну даними, при цьому всі елементи тренажера з'єднані між собою через...
Комплексний тренажер вертольота
Номер патенту: 81720
Опубліковано: 25.01.2008
Автори: Матюха Володимир Михайлович, Барвінок Дмитро Володимирович, Коваль Дмитро Орестович, Тупіков Костянтин Сергійович, Петров Роман Миколайович, Моцарь Юрій Анатолійович, Моцарь Валерій Анатолійович, Моцарь Анатолій Іванович, Зінченко Володимир Павлович, Сененко Руслан Григорович, Моцар Петро Іванович
МПК: G09B 9/04
Мітки: тренажер, комплексний, вертольота
Формула / Реферат:
1. Комплексний тренажер вертольота, що містить кабіну з робочими місцями пілотів, оснащену комплектом приладів, устаткування і органів керування, зовнішній вигляд і розташування яких відповідають їх зовнішньому вигляду і розташуванню в кабіні реального вертольота, системою адаптерів, випромінювачами акустичних шумів і відеокамерами, робоче місце інструктора, що включає блок керування, блок контролю і блок імітації радіозв'язку, цифровий...
Попередній патент: Комплексний тренажер екіпажу багатоцільового тягача мтлб з бойовим модулем
Наступний патент: Комплексний пілотажний тренажер екіпажу літака
Випадковий патент: Лікарський засіб для лікування ран "поліфен"