Комплексний тренажер екіпажу багатоцільового тягача мтлб з бойовим модулем
Номер патенту: 80605
Опубліковано: 10.06.2013
Автори: Казєєв Євгеній Івановіч, Матвієвський Микола Олександрович, Касьян Іван Александровіч, Матвієвський Олександр Миколайович, Бондаренко Тарас Григорович, Касьян Владімір Івановіч
Формула / Реферат
1. Комплексний тренажер екіпажа багатоцільового тягача МТЛБ з бойовим модулем, що містить розміщений на динамічній платформі систему імітаторів у вигляді імітатора кабіни МТЛБ з бойовим модулем з розміщеними усередині нього імітаторами засобів управління, автоматизоване робоче місце (АРМ) керівника занять з програмно-обчислювальним комплексом з програмним забезпеченням (ПЗ), а також систему обміну даними, при цьому елементи тренажера з'єднані між собою через локальну обчислювальну мережу (ЛОМ), який відрізняється тим, що система імітаторів виконана у вигляді загального імітатора кабіни МТЛБ з бойовим модулем (II) з розміщеними усередині нього робочими місцями і імітаторами засобів управління всіх членів екіпажу, імітатор кабіни МТЛБ з бойовим модулем (II) містить систему візуалізації у вигляді оптичних приладів, які виконані з можливістю імітації характеристик реальних приладів спостереження механіка-водія, командира машини та оператора бойового модуля МТЛБ, характеристик прицілів оператора бойового модуля, а також з можливістю імітації відображення виду в оглядові люки командира і механіка-водія, тренажер містить рухливу динамічну платформу (III), виконану з можливістю реалізації шести ступенів свободи, і пов'язану з імітатором кабіни МТЛБ з бойовим модулем (II), АРМ керівника занять (І) містить апаратні програмні модулі, які містять ПЗ і програмовані логічні інтегральні схеми (ПЛІС), що підтримують ″зашиття″ алгоритмів реалізації сценаріїв тренувань, алгоритмів об'єктивного контролю та оцінки учня, алгоритмів об'єктивного контролю та оцінки керівника, а також алгоритмів імітації рельєфу реальної місцевості, при цьому тренажер містить локальну обчислювальну мережу (38), цифрову мережу (39) обміну даними, мережа трактів передачі відеосигналів (40), мережа передачі (41) імітованих звуків, мережа обміну (42) сигналами внутрішнього зв'язку, а також мережу стабілізованої напруги тренажера (43).
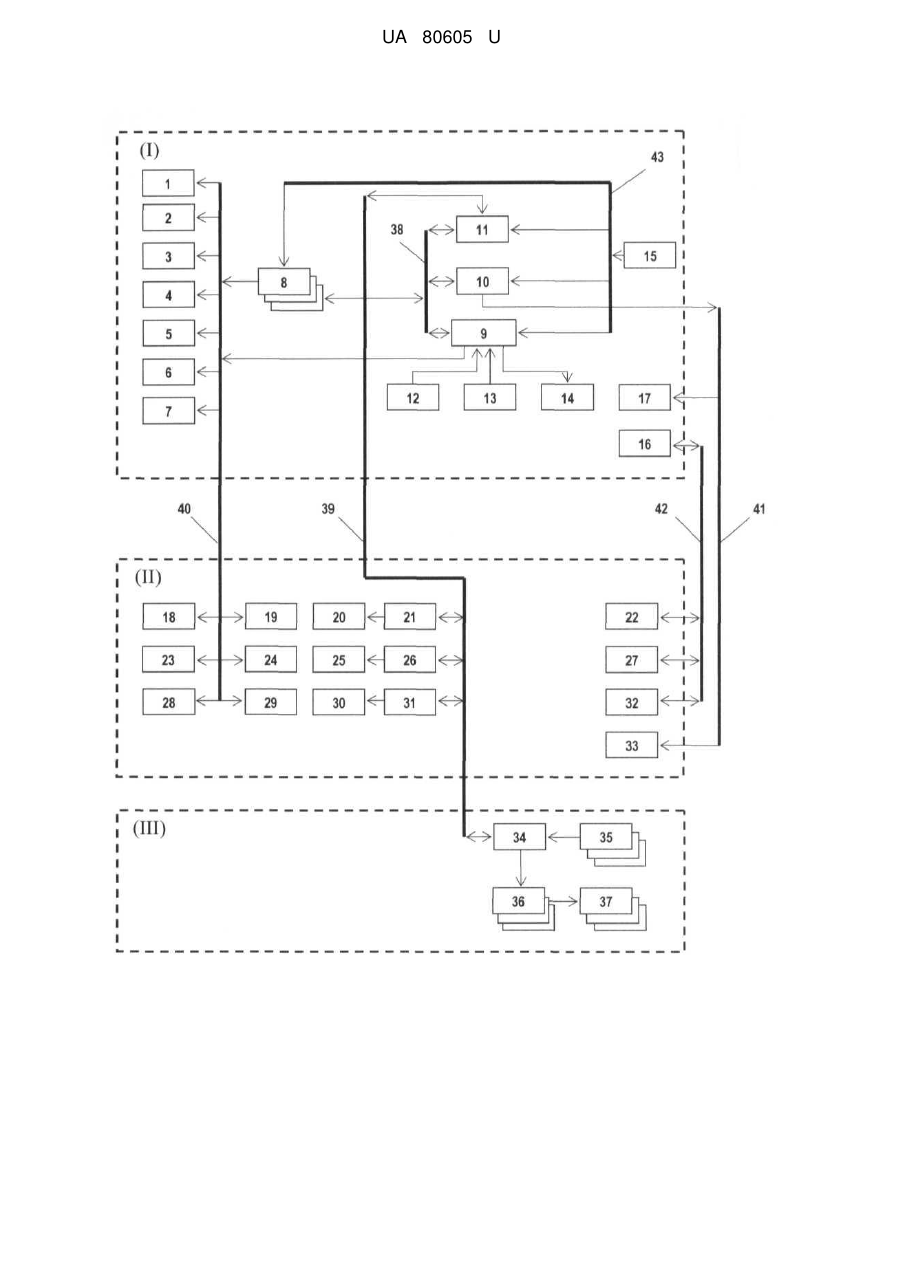
2. Тренажер по п. 1, який відрізняється тим, що цифрова мережа (39) обміну даними з'єднує системний блок-резидент імітатора кабіни МТЛБ з бойовим модулем (11), який розміщений в АРМ керівника занять (І), з пристроєм сполучення приладів і органів управління механіка-водія (21), з пристроєм сполучення приладів і органів управління командира (26), з пристроєм сполучення приладів і органів управління оператора (31), які розташовані в імітаторі кабіни МТЛБ з бойовим модулем (II), а в динамічній платформі (III) - з пристроєм сполучення динамічної платформи (34), при цьому мережа трактів передачі відеосигналів (40) з'єднує системні блоки-графічні станції тренажера (8) і системний блок (9) з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера, і дисплеї, що входять до складу в АРМ керівника занять (І), а саме дисплей (1) для відображення головного меню керівника занять (1), дисплей (2) для відображення положення і стану органів управління і засобів індикації командира, оператора і механіка-водія, дисплей (3) для відображення зовнішнього виду на трасу водіння або на поле бою, дисплей (4) для відображення зображення, спостережуваного на моніторі прицільного комплексу оператора, дисплей (5) для відображення зображення, спостережуваного в перископічний прилад спостереження механіка-водія, дисплей (6) для відображення зображення, спостережуваного в приладі спостереження командира, з великим екраном колективного користування (7), а також імітатори, що входять до складу імітатора кабіни МТЛБ з бойовим модулем (II), а саме імітатор перископічних приладів спостереження механіка-водія (18), імітатор відображення виду в оглядовий люк механіка-водія (19), імітатор приладів спостереження командира (23), імітатор відображення виду в оглядовий люк командира (24), імітатор прицілів оператора (28) та імітатор приладів спостереження оператора (29).
3. Тренажер по п. 1, який відрізняється тим, що мережа передачі імітованих звуків (41) від системного блока-сервера тренажера (10) з'єднує аудіосистему (17) в АРМ керівника занять (І) і аудіосистему (33) в імітаторі кабіни МТЛБ з бойовим модулем (II), мережа обміну сигналами внутрішнього зв'язку (42) з'єднана з апаратурою внутрішнього зв'язку керівника занять (16), механіка-водія (22), командира (27) і оператора (32), а ЛОМ тренажера (38) виконано з можливістю роботи по протоколу User Datagram Protocol і з'єднує системний блок-сервер тренажера (10), системний блок (9) з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера, системний блок-резидент імітатора кабіни МТЛБ з бойовим модулем (11), системні блоки-графічні станції тренажера (8), які розташовані в АРМ керівника занять (І), при цьому рухлива динамічна платформа (III) містить пристрій сполучення динамічної платформи (34), а також в кількості шести штук кожні датчики положення динамічної платформи (35), частотні перетворювачі (36) і приводи (37) динамічної платформи.
Текст
Реферат: Комплексний тренажер екіпажу багатоцільового тягача МТЛБ з бойовим модулем, що містить розміщену на динамічній платформі систему імітаторів у вигляді імітатора кабіни МТЛБ з бойовим модулем з розміщеними усередині нього імітаторами засобів управління, автоматизоване робоче місце (АРМ) керівника занять з програмно-обчислювальним комплексом з програмним забезпеченням (ПЗ), а також систему обміну даними, при цьому елементи тренажера з'єднані між собою через локальну обчислювальну мережу (ЛОМ). Система імітаторів виконана у вигляді загального імітатора кабіни МТЛБ з бойовим модулем (II) з розміщеними усередині нього робочими місцями і імітаторами засобів управління всіх членів екіпажу, імітатор кабіни МТЛБ з бойовим модулем (II) містить систему візуалізації у вигляді оптичних приладів UA 80605 U (12) UA 80605 U UA 80605 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до автоматизованих засобів, а саме до тренажерів, які призначені для навчання екіпажів багатоцільових тягачів легких броньованих (далі - МТЛБ) з бойовим модулем типу, наприклад, "Шквал", "Штурм", "Клівер", 3ТМ-1, "Тандем" або їх модифікацій (далі - МТЛБ з бойовим модулем), у складі командира, оператора і механіка-водія, в ході технічної, вогневої і тактичної підготовки мотострілкових (механізованих) підрозділів Сухопутних військ. Відома інтерактивна автоматизована система імітаційного моделювання у вигляді багатофункціонального тренажера, призначеного для навчання і підготовки авіаційних фахівців, що містить локальну обчислювальну (комп'ютерну) мережу (далі - ЛОМ), уніфіковане робоче місце інструктора, комплекс уніфікованих робочих місць учнів в льотній групі інструктора, екран колективного користування, пристрій введення польотної інформації та базу даних сценаріїв тренувань. При цьому ЛОМ містить програмні модулі реалізації сценаріїв тренувань, об'єктивного контролю, що навчаються, і об'єктивного контролю інструктора [1]. Недоліком пристрою аналога є його невисока ефективність, а також неможливість застосування для навчання і бойової підготовки механізованих (мотострілкових) підрозділів і частин Сухопутних військ, зокрема екіпажів МТЛБ з бойовим модулем. Як пристрій найбільш близького аналога (прототип) вибраний автоматизований тренажерний комплекс для підготовки екіпажів кораблів, який містить систему імітаторів у вигляді імітатора робочого місця механіка-водія з розміщеними у середині нього імітаторами засобів управління, комплекту навчально-діючого зразка автоматизованого робочого місця (АРМ), встановленого на хиткій платформі з двома-трьома ступенями свободи, комплекту АРМ операторів, пост керівництва навчанням, обчислювально-модульний комплекс з програмним забезпеченням (ПЗ) і систему обміну даними, при цьому всі елементи комплексу з'єднані між собою через ЛОМ [2]. Недоліком відомого пристрою найбільш близького аналога є неможливість його застосування для навчання і бойової підготовки механізованих (мотострілкових) підрозділів і частин Сухопутних військ, зокрема екіпажів МТЛБ з бойовим модулем, а також те, що воно не дозволяє індивідуалізувати процес навчання, і, отже, значно звужує коло вирішуваних завдань. У свою чергу, існуючі бази сценаріїв тренувань не дозволяють зробити навчання інтерактивним, вносити до нього зміни по ходу навчання в залежності від прийнятих рішень кожним учнем та оцінювати їх вплив на інших учнів, що призводить до небезпеки виховання переважно «віртуальних фахівців». Задачею пропонованого технічного рішення є створення комплексного тренажера екіпажа (далі - тренажера) для проведення занять з технічної, вогневої і тактичної підготовки з механізованими (мотострілецькими) підрозділами Сухопутних військ, а саме з ротою, взводом, екіпажем МТЛБ з бойовим модулем, шляхом введення в його склад нових елементів і встановлення ефективної взаємозв'язку між всіма елементами тренажера, а також виконання тренажера з можливістю моделювання умов тренажного одностороннього та двостороннього бою, максимально наближеного до реальних бойових дій, з програмно генерованими об'єктами, що буде сприяти підвищенню ефективності і інтенсивності технічної та бойової підготовки підрозділів при мінімальних витратах ресурсних та матеріальних (грошових) коштів на організацію та проведення занять за цими видами підготовки. Вказана задача вирішується тим, що в комплексному тренажері екіпажі багатоцільового тягача МТЛБ з бойовим модулем, що містить розміщений на динамічній платформі систему імітаторів у вигляді імітатора кабіни МТЛБ з бойовим модулем з розміщеними усередині нього імітаторами засобів управління, автоматизоване робоче місце (АРМ) керівника занять з програмно-обчислювальним комплексом з програмним забезпеченням (ПЗ), а також систему обміну даними, при цьому елементи тренажера з'єднані між собою через локальну обчислювальну мережу (ЛОМ), новим є те, що, система імітаторів виконана у вигляді загального імітатора кабіни МТЛБ з бойовим модулем (II) з розміщеними усередині нього робочими місцями і імітаторами засобів управління всіх членів екіпажу, імітатор кабіни МТЛБ з бойовим модулем (II) містить систему візуалізації у вигляді оптичних приладів, які виконані з можливістю імітації характеристик реальних приладів спостереження механіка-водія, командира машини та оператора бойового модуля МТЛБ, характеристик прицілів оператора бойового модуля, а також з можливістю імітації відображення виду в оглядові люки командира і механікаводія, тренажер містить рухливу динамічну платформу (III), виконану з можливістю реалізації шести ступенів свободи, і пов'язану з імітатором кабіни МТЛБ з бойовим модулем (II), АРМ керівника занять (І) містить апаратні програмні модулі, які містять ПЗ і програмовані логічні інтегральні схеми (ПЛІС), що підтримують «зашиття» алгоритмів реалізації сценаріїв тренувань, алгоритмів об'єктивного контролю та оцінки учня, алгоритмів об'єктивного контролю та оцінки керівника, а також алгоритмів імітації рельєфу реальної місцевості, при цьому тренажер містить 1 UA 80605 U 5 10 15 20 25 30 35 40 45 50 55 60 локальну обчислювальну мережу (38), цифрову мережу (39) обміну даними, мережа трактів передачі відеосигналів (40), мережа передачі (41) імітованих звуків, мережа обміну (42) сигналами внутрішнього зв'язку, а також мережу стабілізованого напруги тренажера (43). Цифрова мережа (39) обміну даними з'єднує системний блок-резидент імітатора кабіни МТЛБ з бойовим модулем (11), який розміщений в АРМ керівника занять (І), з пристроєм сполучення приладів і органів управління механіка-водія (21), з пристроєм сполучення приладів і органів управління командира (26), з пристроєм сполучення приладів і органів управління оператора (31), які розташовані в імітаторі кабіни МТЛБ з бойовим модулем (II), а в динамічній платформі (III) - з пристроєм сполучення динамічної платформи (34). Мережа трактів передачі відеосигналів (40) з'єднує системні блоки-графічні станції тренажера (8) і системний блок (9) з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера, і дисплеї, що входять до складу в АРМ керівника занять (І), а саме дисплей (1) для відображення головного меню керівника занять (1), дисплей (2) для відображення положення і стану органів управління і засобів індикації командира, оператора і механіка-водія, дисплей (3) для відображення зовнішнього виду на трасу водіння або на поле бою, дисплей (4) для відображення зображення, спостережуваного на моніторі прицільного комплексу оператора, дисплей (5) для відображення зображення, спостережуваного в перископічний прилад спостереження механіка-водія, дисплей (6) для відображення зображення, спостережуваного в приладі спостереження командира, з великим екраном колективного користування (7), а також імітатори, що входять до складу імітатора кабіни МТЛБ з бойовим модулем (II), а саме імітатор перископічних приладів спостереження механіка-водія (18), імітатор відображення виду в оглядовий люк механіка-водія (19), імітатор приладів спостереження командира (23), імітатор відображення виду в оглядовий люк командира (24), імітатор прицілів оператора (28) та імітатор приладів спостереження оператора (29). Мережа передачі імітованих звуків (41) від системного блока-сервера тренажера (10) з'єднує аудіосистему (17) в АРМ керівника занять (І) і аудіосистему (33) в імітаторі кабіни МТЛБ з бойовим модулем (II), мережа обміну сигналами внутрішнього зв'язку (42) з'єднана з апаратурою внутрішнього зв'язку керівника занять (16), механіка-водія (22), командира (27) і оператора (32), а ЛОМ тренажера (38) виконано з можливістю роботи по протоколу User Datagram Protocol і з'єднує системний блок-сервер тренажера (10), системний блок (9) з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера, системний блок-резидент імітатора кабіни МТЛБ з бойовим модулем (11), системні блоки-графічні станції тренажера (8), які розташовані в АРМ керівника занять (І). Рухлива динамічна платформа (III) містить пристрій сполучення динамічної платформи (34), а також в кількості шести штук кожні датчики положення динамічної платформи (35), частотні перетворювачі (36) і приводи (37) динамічної платформи. Вищеперелічені ознаки складають суть заявлюваного технічного рішення. Наявність причинно-наслідного зв'язку між сукупністю суттєвих ознак заявлюваного технічного рішення і досягуваним технічним результатом полягає в наступному. Особливістю структури і функціонування розробленого комплексного тренажера екіпажа багатоцільового тягача МТЛБ з бойовим модулем, який містить в собі розміщений на рухомій динамічній платформі імітатор кабіни МТЛБ з розташованими усередині нього робочими місцями механіка-водія, оператора бойового модуля і командира тягача з імітаторами засобів штатного озброєння; АРМ керівника занять з програмно-обчислювальним комплексом з ПЗ, що містить сценарії тренувань, об'єктивного контролю та оцінки учнів, а також ЛОМ, є, зокрема, таке. ПЗ програмно-обчислювального комплексу АРМ керівника занять (І) пропонованого тренажера в деяких вправах з водіння і зі стрільби виконано з використанням імітованих місцевих предметів і рельєфу місцевості, створених на основі цифрових (електронних) карт земної поверхні, отриманих космічною і аерофотозйомкою. Завдяки установці імітатора кабіни МТЛБ з бойовим модулем (II) на шестиступеневій рухомій динамічній платформі (III), реалізовані поперечні і поздовжні переміщення та прискорення імітатора кабіни МТЛБ, прискорення і обмежене обертання його навколо вертикальної осі, з урахуванням можливого повороту корпусу МТЛБ під час вправ, що істотно підвищує реалістичність імітації руху тягача під час бою. Система візуалізації в імітаторі кабіни МТЛБ з бойовим модулем (II) містить імітатори оптичних приладів, які імітують характеристики реальних прицілів оператора і приладів спостереження командира і механіка-водія МТЛБ. Таким чином, вищевказане конструктивне виконання тренажера, а також можливість моделювання за допомогою тренажера умов тренажно одностороннього та двостороннього 2 UA 80605 U 5 10 15 20 25 30 35 40 45 50 55 60 бою, максимально наближеного до реальних бойових дій, з програмно генерованими об'єктами, сприяє підвищенню ефективності й інтенсивності технічної, вогневої та тактичної підготовки підрозділів при мінімальних витратах ресурсних і матеріальних (грошових) засобів на організацію та проведення занять по цим видам підготовки [3]. На кресленні показана структура комплексного тренажера екіпажа багатоцільового тягача МТЛБ з бойовим модулем. Тренажер включає в себе три (укрупнені) системи (позначені на фіг. римськими цифрами І III): АРМ керівника занять (І), імітатор кабіни МТЛБ з бойовим модулем (II) на рухомій динамічній платформі (III). В АРМ керівника занять (І) розміщені: 1 - дисплей для відображення головного меню керівника занять, з ПЗ (програмами) підменю управління режимами роботи тренажера, редагування вправ, введення даних про учнів, вибору погодних умов, перегляду електронної карти місцевості, поточного контролю за діями учнів, перегляду протоколів (у формі електронних текстових документів (файлів) про виконання вправи); 2 - дисплей для відображення стану та стану органів управління і засобів індикації командира, оператора та механіка-водія; 3 - дисплей для відображення зовнішнього вигляду на трасу водіння або на полі бою; 4 - дисплей для відображення зображення, спостережуваного на моніторі прицільного комплексу оператора; 5 - дисплей для відображення зображення, спостережуваного в перископічний прилад спостереження механіка-водія; 6 - дисплей для відображення зображення, спостережуваного в приладі спостереження командира; 7 - великий екран колективного користування (виконаний у вигляді плазмової панелі, ЖК монітора або проекційного екрана), призначений для спостереження за ходом виконання вправи іншими учнями, для підведення підсумків заняття і повторення виконання вправи в запису; 8 - системні блоки-графічні станції тренажера; 9 - системний блок з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера; 10 - системний блок-сервер тренажера; 11 системний блок-резидент імітатора кабіни МТЛБ з бойовим модулем; 12 - оптичний маніпулятор; 13 - клавіатура; 14 - принтер; 15 - система електроживлення тренажера, призначена для безперебійного живлення системних блоків тренажера; 16 - апаратура внутрішнього зв'язку керівника занять; 17 - аудіосистема в АРМ керівника занять (І). В імітаторі кабіни МТЛБ з бойовим модулем (II) розміщені наступні елементи і блоки: 18 імітатор перископічних приладів спостереження механіка-водія; 19 - імітатор відображення виду в оглядовий люк механіка-водія; 20 - імітатор щитка приладів і органів управління механікаводія; 21 - пристрій сполучення приладів і органів управління механіка-водія; 22 - апаратура внутрішнього зв'язку механіка-водія; 23 - імітатор приладів спостереження командира; 24 імітатор відображення виду в оглядовий люк командира; 25 - імітатор приладів і органів управління командира; 26 - пристрій сполучення приладів і органів управління командира; 27 апаратура внутрішнього зв'язку командира; 28 - імітатор прицілів оператора; 29 - імітатор приладів спостереження оператора; 30 - імітатор приладів і органів управління оператора; 31 пристрій сполучення приладів і органів управління оператора; 32 - апаратура внутрішнього зв'язку оператора; 33 - аудіосистема в імітаторі кабіни МТЛБ з бойовим модулем (II). Динамічна платформа (III) є рухливою шестиступеневою платформою. До її складу входять наступні блоки: 34 - пристрій сполучення динамічної платформи; 35 - датчики положення динамічної платформи, що виконують роль датчиків зворотного зв'язку (у кількості шість шт.); 36 - частотні перетворювачі (у кількості шість шт.); 37 - приводи динамічної платформи (у кількості шість шт.). У тренажері розміщені і функціонують наступні телекомунікаційні мережі та мережі електричних з'єднань: 38 - ЛОМ тренажера, що з'єднує системний блок-сервер тренажера (10), системний блок (9) з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера, системний блок-резидент імітатора кабіни МТЛБ з бойовим модулем (11), системні блоки графічні станції тренажера (8) (всі вищевказані елементи і блоки розташовані в АРМ керівника занять (І); 39 - цифрова мережа обміну даними між системним блоком-резидентом імітатора кабіни МТЛБ з бойовим модулем (11) (в АРМ керівника занять (І), пристроєм сполучення приладів і органів управління механіка-водія (21), пристроєм сполучення приладів і органів управління командира (26), пристроєм сполучення приладів і органів управління оператора (31) (всі вищевказані пристрою сполучення розташовані в імітаторі кабіни МТЛБ з бойовим модулем (II), з пристроєм сполучення динамічної платформи (34) в динамічній платформі (III); 40 - мережа трактів передачі відеосигналів від системних блоків-графічних станцій тренажера (8) і системного блока (9) з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера, на дисплеї (1 - 6), на великий екран колективного користування 3 UA 80605 U 5 10 15 20 25 30 35 40 45 50 55 60 (7) в АРМ керівника занять (І), на імітатор перископічних приладів спостереження механіка-водія (18), на імітатор відображення виду в оглядовий люк механіка-водія (19), на імітатор приладів спостереження командира (23), на імітатор відображення виду в оглядовий люк командира (24), на імітатор прицілів оператора (28), на імітатор приладів спостереження оператора (29) в імітаторі кабіни МТЛБ з бойовим модулем (II); 41 - мережа передачі імітованих звуків від системного блока-сервера тренажера (10) на аудіосистему (17) в АРМ керівника занять (І) і на аудіосистему (33) в імітаторі кабіни МТЛБ з бойовим модулем (II); 42 - мережа обміну сигналами внутрішнього зв'язку між апаратурою внутрішнього зв'язку керівника занять (16) в АРМ керівника занять (І), механіка-водія (22), командира (27) і оператора (32) в імітаторі кабіни МТЛБ з бойовим модулем в (II); 43 - мережа стабілізованої напруги тренажера, 220 В, 50 Гц, до якої підключені всі системні блоки тренажера (8) - (11). ЛОМ тренажера (38) працює, наприклад, за протоколом UDP (User Datagram Protocol, тобто це транспортний протокол користувацьких дейтаграм, в рамках якого передаються дані в мережах без встановлення з'єднання). Системний блок (9) з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера, підключений до оптичного маніпулятора (12), до клавіатури (13) і до принтера (14), а по мережі трактів (40) передачі відеосигналів - до дисплея (1) для відображення головного меню керівника занять. Комплексний тренажер екіпажа багатоцільового тягача МТЛБ з бойовим модулем використовується наступним чином. Вихідні дані для виконання вправи, введені керівником занять в АРМ з допомогою клавіатури (13) і оптичного маніпулятора (12) в головному меню керівника занять на дисплеї (1), підключеному до системного блоку (9) з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера, передаються по ЛОМ тренажера (38) на системний блок-сервер тренажера (10). За допомогою останнього розраховується рельєф місцевості, визначається положення всіх об'єктів, розраховуються взаємодії та зіткнення об'єктів, нахил і поворот корпусу, траєкторія польоту куль і снарядів, маршрут руху МТЛБ, формуються звуки роботи апаратури. Ці дані по ЛОМ тренажера (38) з системного блока-сервера тренажера (10) передаються на системні блоки-графічні станції тренажера (8), за допомогою яких виробляються зображення для імітаторів приладів спостереження й прицілів. Отримані зображення передають по мережі трактів передачі відеосигналів (40) на дисплеї (1-6) і на великий екран колективного користування (7), що знаходяться в АРМ керівника занять (І), на імітатор перископічних приладів спостереження механіка-водія (18), на імітатор відображення виду в оглядовий люк механіка-водія (19), на імітатор приладів спостереження командира (23), на імітатор відображення виду в оглядовий люк командира (24), на імітатор прицілів оператора (28), на імітатор приладів спостереження оператора (29), що знаходяться в імітаторі кабіни МТЛБ з бойовим модулем (II). У відповідності зі сценарієм виконуваної вправи сигнали з системного блока-сервера тренажера (10) по ЛОМ тренажера (38) надходять на системний блок-резидент імітатора кабіни МТЛБ з бойовим модулем (11), в якому на основі цієї інформації виробляються і передаються по цифровій мережі обміну даними (39) сигнали на пристрої сполучення приладів і органів управління механіка-водія (21), командира (26), оператора (31) і на пристрій сполучення динамічної платформи (34). З отриманих даних за допомогою пристроїв сполучення (21), (26) і (31) виробляють команди управління роботою імітатора щитка приладів і органів управління механіка-водія (20), імітатора приладів і органів управління командира (25), імітатора приладів і органів управління оператора (30) і для управління динамічною платформою (III). У динамічній платформі (III) у відповідності з сигналами управління, які надходять від пристрою сполучення динамічної платформи (34), за допомогою шести частотних перетворювачів (36) змінюють амплітуду і частоту напруги живлення шістьма однаковими приводами динамічної платформи (37). У результаті переміщення приводів (37) змінюють положення в просторі динамічної платформи (III) у відповідності з імітованими прискореннями і нахилами кабіни МТЛБ. Сигнали зворотного зв'язку про поточний стан динамічної платформи (III) знімають з шести датчиків (35) становища динамічної платформи і подають в пристрій сполучення динамічної платформи (34), і далі по цифровій мережі обміну даними (39) передають на системний блокрезидент (11) імітатора кабіни МТЛБ з бойовим модулем, а потім по ЛОМ тренажера (38) на 4 UA 80605 U 5 10 15 20 25 30 35 40 45 50 55 60 системний блок-сервер тренажера (10) для обробки. З метою підвищення реалістичності відчуттів учнів в конструкцію імітатора щитка приладів і органів управління механіка-водія (20) введені пристрої навантаження (на фіг. не позначені). Відповідно з діями учнів змінюється стан імітатора щитка приладів і органів управління механіка-водія (20), імітатора приладів і органів управління командира (25), імітатора приладів і органів управління оператора (30). Сигнали від зазначених імітаторів надходять по цифровій мережі (39) обміну даними на пристрої сполучення приладів і органів управління (21, 26 і 31), в яких вони обробляються, після чого передаються на системний блок - резидент імітатора кабіни МТЛБ з бойовим модулем (11), звідки інформація по ЛОМ тренажера (38) передається на системний блок - сервер тренажера (10) для розрахунку ходу виконання вправи. По мережі передачі імітованих звуків (41) звуки вправи, сформовані системним блоком сервером тренажера (10), відповідно до ПЗ і програмних модулів передаються для відтворення на аудіосистему (17) в АРМ керівника занять (1) і на аудіосистему (33) в імітаторі кабіни МТЛБ з бойовим модулем (II). На етапі підготовки заняття його керівник на своєму АРМ на дисплеї (1), з'єднаному з системним блоком (9) з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера, в головному меню за допомогою оптичного маніпулятора (12) на екрані дисплея (1) проводить наступні операції на електронних текстових і графічних документах: а) вибирає тип вправи, час дня, року, тип місцевості. У підменю вибору номера вправи оптичним маніпулятором (12) на екрані дисплея (1) керівник вибирає тип і номер вправи, у підменю умов виконання вправ оптичним маніпулятором (12) вводить погодні умови за допомогою шкал температури, швидкості вітру, тиску повітря, інтенсивності туману; б) вводить дані про учнів. У підменю введення даних про учнів за допомогою клавіатури (13) керівник вносить прізвища і номер підрозділу у відповідні поля на екрані дисплея (1). Дані використовуються при подальшому виставлянні оцінки, формування звіту та його друку на принтері (14); в) редагує вправу. У підменю редагування вправ на екрані дисплея (1) керівник оптичним маніпулятором (12) і клавіатурою (13) змінює тип і розташування цілей, об'єктів та перешкод на місцевості, їх кількість і характеристики. У цьому ж підменю, використовуючи схему місцевості на екрані дисплея (1), керівник знайомить учнів на електронній карті місцевості з умовами виконання вправи, розміщенням та кількістю цілей, оціночними показниками, вимогами до якості виконання вправ, часом на виконання вправи. Після введення всіх вихідних даних на екрані дисплея (1) в електронні текстові та графічні документи керівник починає виконання вправи. Командир, оператор і механік-водій займають свої місця в імітаторі кабіни МТЛБ з бойовим модулем (II). Динамічна платформа (III) піднімається в середнє положення. У імітаторі перископічних приладів спостереження механіка-водія (18), в імітаторі відображення виду в оглядовий люк механіка-водія (19), в імітаторі приладів спостереження командира (23), в імітаторі відображення виду в оглядовий люк командира (24), в імітаторі прицілів оператора (28), в імітаторі приладів спостереження оператора (29) в імітаторі кабіни МТЛБ з бойовим модулем (II), на дисплеях (1-6) АРМ керівника занять (І) відображені місцевості, цілі, об'єкти, перешкоди. Механік-водій заводить двигун МТЛБ. Динамічна платформа (III) здійснює хитання і повороти у відповідності з рельєфом імітованої місцевості. Механік-водій керує машиною за допомогою імітатора щитка приладів і органів управління механіка-водія (20), спостерігаючи за місцевістю в імітаторі перископічних приладів спостереження механіка-водія (18) і в імітаторі відображення виду в оглядовий люк механікаводія (19). Командир машини веде спостереження за місцевістю в імітаторі приладів спостереження командира (23) і в імітаторі відображення виду в оглядовий люк командира (24). Оператор виявляє цілі в імітаторі приладів спостереження оператора (29) і в імітаторі прицілів оператора (28), виробляючи їх імітувати ураження зброєю бойового модуля за допомогою імітатора приладів і органів управління оператора (30). Під час виконання вправи керівник може постійно контролювати на екрані дисплея (1) загальну працездатність тренажера за станом контрольного індикатора і за повідомленнями програми в головному меню в електронних текстових і графічних документах. Керівник безперервно контролює дії учнів по зображенню органів управління на екрані дисплея (2) для відображення положення і стану органів управління і засобів індикації командира, оператора і механіка-водія, і по положенню МТЛБ на електронній карті місцевості на екрані дисплея (1), а також спостерігаючи на екранах дисплеїв (3-6) зовнішній вигляд місцевості 5 UA 80605 U 5 10 15 20 25 30 35 40 45 50 55 60 і зображення, що збігається із зображенням в імітаторах приладів спостереження механікаводія (18), командира (23) і оператора (29). Під час виконання вправи керівник має можливість за допомогою оптичного маніпулятора (12) і клавіатури (13) давати вступні [5] про несправності апаратури МТЛБ. Учні, що знаходяться поза тренажером, на великому екрані колективного користування (7) спостерігають за діями екіпажу, що знаходиться в імітаторі кабіни МТЛБ з бойовим модулем (II). Керівник за допомогою голосового зв'язку звертає увагу на допущені помилки і неправильні дії учнів в тренажері (наприклад: неправильна послідовність дій при включенні апаратури, пропуск цілі, неправильне вимірювання дальності, неправильне управління польотом ПТУР, перевищення оборотів двигуна, перевищення допустимої температури охолоджуючої рідини, неподання сигналу про початку руху). Помилки тих, що навчються, фіксуються програмою тренажера і роздруковуються в звіті на принтері (14). Після завершення вправи, при необхідності, відбувається повторний показ запису виконання вправи на екрані колективного користування (7) або на екранах дисплеїв (1-6) АРМ керівника занять (І), проводиться розбір допущених помилок, оголошується оцінка, яка фіксується в електронній формі в вигляді послідовних кодів в протоколі і роздруковується на принтері (14). У програму тренажера вбудовані модулі, за допомогою яких автоматично фіксують помилкові дії учня, що порушують правила інструкції з експлуатації МТЛБ з бойовим модулем, і повідомляють про це керівнику занять на екранах дисплеїв (1), (2). В тренажер вбудована система електроживлення тренажера (15), яка забезпечує включення і виключення систем тренажера, живлення їх стабілізованою однофазною напругою 220 В, 50 Гц по мережі стабілізованої напруги тренажера (43), безперебійне живлення системних блоків тренажера протягом не менше 8 хвилин після пропажі напруги в зовнішній мережі живлення. Розроблений тренажер максимально повно імітує інтер'єр робочих місць екіпажа МТЛБ з бойовим модулем, включаючи систему керування машиною, систему управління зброєю, прилади спостереження, всі перемикачі, індикатори, рукоятки, педалі. За допомогою тренажера, програмних модулів і ПЗ можливе створення комп'ютерних моделей реальних ділянок місцевості. При цьому забезпечується моделювання ландшафту, об'єктів, шумів, звукових ефектів роботи апаратури, стрільби та руху машини, імітується робота засобів індикації, важелів, рукояток і органів управління МТЛБ з бойовим модулем в імітаторі щитка приладів і органів управління механіка-водія (20), імітаторі приладів і органів управління командира (25), імітаторі приладів і органів управління оператора (30), хитання і повороти імітатора кабіни МТЛБ з бойовим модулем (II). Візуалізація зображень виробляється з високою (не гірше за 1280 х 1024) розподільною здатністю. Таким чином, використання розробленого комплексного тренажера екіпажа багатоцільового тягача МТЛБ з бойовим модулем дозволяє вирішувати наступні завдання: а) відпрацьовування і закріплення навичок у використанні всього штатного озброєння МТЛБ з бойовим модулем (30мм гармата; 7,62-мм ПКТ; пускові установки ПТУР; 30-мм автоматичний гранатомет; 81-мм система запуску димових гранат 902Б "Хмара"), б) початкове навчання та вдосконалення навичок водіння МТЛБ на різній місцевості, в умовах різної видимості і метеорологічних умовах; в) гарантовану підтримку на високому рівні навичок в стрільбі екіпажів МТЛБ; г) об'єктивну оцінку дій учнів; д) моделювання у вправах таких умов реального бою, які недосяжні іншими методами в мирних умовах бойової підготовки; е) злагодження [5] екіпажів МТЛБ в умовах, максимально наближених до реальних бойових умов. Крім того, підвищення ефективності використання тренажера механіка-водія МТЛБ у порівнянні з найближчим аналогом досягається за рахунок поліпшення реалістичності навчання, імітацією неможливих в мирний час ситуацій, збільшенням числа ступенів свободи динамічної платформи. Апробація тренажера була успішно проведена в київському НВО "Енергія-2000" (Україна) в 2010-2012 рр. і в Алматинському ТОВ "Алматиенергосервіс" (Республіка Казахстан) в 2011-2012 pp. [6-7]. Джерела інформації 1. Патент RU № 2087037, МПК 8 G09B9/08. Опубл. 10.08.1997, Бюл. № 25. 2. Патент RU № 2234138, МПК 8 G09B9/00. Опубл. 08.10.2004. 3. Кириллов А.И., Кузнецов В.П., Агафонов В.И. и др./Под ред. Ю.А. Науменко. Подготовка офицеров запаса Сухопутных войск: Учебное пособие. - М.: Воениздат, 1989. -448 с. 4. IEEE Standard for Modeling and Simulation (M&S) High Level Architecture (HLA) - Framework and Rules. IEEE Std. 1516-2000. The Institute of Electrical and Electronics Engineers, Inc., 2000. 21p. 5. Словарь военных терминов (http://military_terms.academic.ru/). 6 UA 80605 U 6. www.simulator.com.ua. 7. http://kzaes.kz. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 30 35 40 45 50 55 60 1. Комплексний тренажер екіпажу багатоцільового тягача МТЛБ з бойовим модулем, що містить розміщену на динамічній платформі систему імітаторів у вигляді імітатора кабіни МТЛБ з бойовим модулем з розміщеними усередині нього імітаторами засобів управління, автоматизоване робоче місце (АРМ) керівника занять з програмно-обчислювальним комплексом з програмним забезпеченням (ПЗ), а також систему обміну даними, при цьому елементи тренажера з'єднані між собою через локальну обчислювальну мережу (ЛОМ), який відрізняється тим, що система імітаторів виконана у вигляді загального імітатора кабіни МТЛБ з бойовим модулем (II) з розміщеними усередині нього робочими місцями і імітаторами засобів управління всіх членів екіпажу, імітатор кабіни МТЛБ з бойовим модулем (II) містить систему візуалізації у вигляді оптичних приладів, які виконані з можливістю імітації характеристик реальних приладів спостереження механіка-водія, командира машини та оператора бойового модуля МТЛБ, характеристик прицілів оператора бойового модуля, а також з можливістю імітації відображення виду в оглядові люки командира і механіка-водія, тренажер містить рухливу динамічну платформу (III), виконану з можливістю реалізації шести ступенів свободи, і пов'язану з імітатором кабіни МТЛБ з бойовим модулем (II), АРМ керівника занять (І) містить апаратні програмні модулі, які містять ПЗ і програмовані логічні інтегральні схеми (ПЛІС), що підтримують ″зашиття″ алгоритмів реалізації сценаріїв тренувань, алгоритмів об'єктивного контролю та оцінки учня, алгоритмів об'єктивного контролю та оцінки керівника, а також алгоритмів імітації рельєфу реальної місцевості, при цьому тренажер містить локальну обчислювальну мережу (38), цифрову мережу (39) обміну даними, мережу трактів передачі відеосигналів (40), мережу передачі (41) імітованих звуків, мережу обміну (42) сигналами внутрішнього зв'язку, а також мережу стабілізованої напруги тренажера (43). 2. Тренажер по п. 1, який відрізняється тим, що цифрова мережа (39) обміну даними з'єднує системний блок-резидент імітатора кабіни МТЛБ з бойовим модулем (11), який розміщений АРМ керівника занять (І), з пристроєм сполучення приладів і органів управління механіка-водія (21), з пристроєм сполучення приладів і органів управління командира (26), з пристроєм сполучення приладів і органів управління оператора (31), які розташовані в імітаторі кабіни МТЛБ з бойовим модулем (II), а в динамічній платформі (III) - з пристроєм сполучення динамічної платформи (34), при цьому мережа трактів передачі відеосигналів (40) з'єднує системні блоки-графічні станції тренажера (8) і системний блок (9) з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера, і дисплеї, що входять до складу в АРМ керівника занять (І), а саме дисплей (1) для відображення головного меню керівника занять (1), дисплей (2) для відображення положення і стану органів управління і засобів індикації командира, оператора і механіка-водія, дисплей (3) для відображення зовнішнього виду на трасу водіння або на поле бою, дисплей (4) для відображення зображення, спостережуваного на моніторі прицільного комплексу оператора, дисплей (5) для відображення зображення, спостережуваного в перископічний прилад спостереження механіка-водія, дисплей (6) для відображення зображення, спостережуваного в приладі спостереження командира, з великим екраном колективного користування (7), а також імітатори, що входять до складу імітатора кабіни МТЛБ з бойовим модулем (II), а саме імітатор перископічних приладів спостереження механіка-водія (18), імітатор відображення виду в оглядовий люк механіка-водія (19), імітатор приладів спостереження командира (23), імітатор відображення виду в оглядовий люк командира (24), імітатор прицілів оператора (28) та імітатор приладів спостереження оператора (29). 3. Тренажер по п. 1, який відрізняється тим, що мережа передачі імітованих звуків (41) від системного блока-сервера тренажера (10) з'єднує аудіосистему (17) в АРМ керівника занять (І) і аудіосистему (33) в імітаторі кабіни МТЛБ з бойовим модулем (II), мережа обміну сигналами внутрішнього зв'язку (42) з'єднана з апаратурою внутрішнього зв'язку керівника занять (16), механіка-водія (22), командира (27) і оператора (32), а ЛОМ тренажера (38) виконано з можливістю роботи по протоколу User Datagram Protocol і з'єднує системний блок-сервер тренажера (10), системний блок (9) з основним ПЗ і програмними модулями, керуючими режимами роботи тренажера, системний блок-резидент імітатора кабіни МТЛБ з бойовим модулем (11), системні блоки-графічні станції тренажера (8), які розташовані в АРМ керівника занять (І), при цьому рухлива динамічна платформа (III) містить пристрій сполучення динамічної платформи (34), а також в кількості шести штук кожні датчики положення динамічної платформи (35), частотні перетворювачі (36) і приводи (37) динамічної платформи. 7 UA 80605 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюComplex simulator for a crew of multi-purpose tractor mtlb with fighting module
Автори англійськоюMatvievskyi Oleksandr Mykolaiovych, Matvievskyi Mykola Oleksandrovych, Bondarenko Taras Hryhorovych, Kasian Vladimir Ivanovich, Kasian Ivan Aleksandrovich, Kazeiev Yevhenii Ivanovich
Назва патенту російськоюКомплексный тренажер экипажа многоцелевого тягача мтлб с боевым модулем
Автори російськоюМатвиевский Александр Николаевич, Матвиевский Николай Александрович, Бондаренко Тарас Григорьевич, Касьян Владимир Иванович, Касьян Иван Александрович, Казеев Евгений Иванович
МПК / Мітки
МПК: F41G 3/00, G09B 9/04, G09B 9/00, G09B 7/00
Мітки: багатоцільового, тренажер, бойовим, комплексний, екіпажу, мтлб, модулем, тягача
Код посилання
<a href="https://ua.patents.su/10-80605-kompleksnijj-trenazher-ekipazhu-bagatocilovogo-tyagacha-mtlb-z-bojjovim-modulem.html" target="_blank" rel="follow" title="База патентів України">Комплексний тренажер екіпажу багатоцільового тягача мтлб з бойовим модулем</a>
Комплексний тренажер екіпажу танка т-72

Номер патенту: 80603
Опубліковано: 10.06.2013
Автори: Матвієвський Микола Олександрович, Казєєв Євгеній Івановіч, Касьян Іван Александровіч, Касьян Владімір Івановіч, Бондаренко Тарас Григорович, Матвієвський Олександр Миколайович
МПК: G09B 9/04, G09B 7/00, F41G 3/00, G09B 9/00
Мітки: тренажер, екіпажу, т-72, комплексний, танка
Формула / Реферат:
1. Комплексний тренажер екіпажу танка Т-72, що містить розміщену на рухомій динамічній платформі систему імітаторів у вигляді імітаторів робочих місць учнів з розміщеними усередині них імітаторами засобів управління, автоматизоване робоче місце (АРМ) керівника занять з програмно-обчислювальним комплексом з програмним забезпеченням (ПЗ), а також систему обміну даними, при цьому елементи тренажера з'єднані між собою через локальну...
Комплексний тренажер екіпажу бронетранспортера бтр-80
Номер патенту: 80604
Опубліковано: 10.06.2013
Автори: Бондаренко Тарас Григорович, Казєєв Євгеній Івановіч, Матвієвський Микола Олександрович, Касьян Владімір Івановіч, Матвієвський Олександр Миколайович, Касьян Іван Алєксандровіч
МПК: F41G 3/00, G09B 9/00, G09B 9/04, G09B 7/00
Мітки: бронетранспортера, тренажер, бтр-80, комплексний, екіпажу
Формула / Реферат:
1. Комплексний тренажер екіпажу бронетранспортера БТР-80, що містить розміщену на динамічній платформі систему імітаторів у вигляді імітаторів робочих місць учнів з розміщеними усередині них імітаторами засобів управління, автоматизоване робоче місце (АРМ) керівника занять з програмно-обчислювальним комплексом з програмним забезпеченням (ПЗ), а також систему обміну даними, при цьому елементи тренажера з'єднані між собою через локальну...
Комплексний тренажер екіпажу бойової машини піхоти бмп-2

Номер патенту: 80602
Опубліковано: 10.06.2013
Автори: Касьян Владімір Івановіч, Касьян Іван Александровіч, Бондаренко Тарас Григорович, Матвієвський Олександр Миколайович, Казєєв Євгеній Івановіч, Матвієвський Микола Олександрович
МПК: G09B 9/00, G09B 7/00, G09B 9/04, F41G 3/00
Мітки: машини, бмп-2, піхоти, екіпажу, комплексний, бойової, тренажер
Формула / Реферат:
1. Комплексний тренажер екіпажу бойової машини піхоти БМП-2, що містить розміщену на рухомій динамічній платформі систему імітаторів у вигляді імітаторів робочих місць учнів з розміщеними усередині них імітаторами засобів управління, автоматизоване робоче місце (АРМ) керівника занять з програмно-обчислювальним комплексом з програмним забезпеченням (ПЗ), а також систему обміну даними, при цьому всі елементи тренажера з'єднані між собою через...
Колісний бронетранспортер бтр-3е1 з бойовим модулем “штурм”
Номер патенту: 35839
Опубліковано: 10.10.2008
Автори: Лисенко Валерій Олександрович, Бондарчук Сергій Васильович, Богомол Володимир Іванович, Медвідь Володимир Станіславович, Коваленко Олександр Володимирович
МПК: F41H 7/00, B62D 55/00, B62D 39/00, B62D 63/00
Мітки: бтр-3е1, бронетранспортер, штурм, бойовим, модулем, колісний
Формула / Реферат:
1. Колісний бронетранспортер БТР-ЗЕ1 з бойовим модулем "Штурм", який містить корпус, розділений конструктивно на відділення керування, бойове відділення та відділення силової установки, башту з розміщеними на ній озброєнням, механізмом повороту, прицільним комплексом та комплексом керування стрільбою, встановлену на корпусі, сидіння командира, механіка-водія, оператора та особового складу, встановлені, відповідно, усередині...
Модульний комплексний тренажер екіпажа бойової машини піхоти бмп-2
Номер патенту: 74262
Опубліковано: 25.10.2012
Автори: Удачин Артем Альбертович, Семиглазов Всеволод Володимирович, Рибченко Сергій Миколайович, Чистяков Геннадій Володимирович, Семиглазов Володимир Всеволодович, Пашковський Олександр Ювеналійович, Клімов Олександр Сергійович
МПК: G09B 9/04, F41G 3/00, F41G 3/26
Мітки: екіпажа, комплексний, бойової, піхоти, тренажер, бмп-2, модульний, машини
Формула / Реферат:
Модульний комплексний тренажер екіпажа бойової машини піхоти БМП-2, що містить робоче місце керівника з програмним і апаратним (залежно від комплектації) дублюванням полів зору прицілів і приладів спостереження навчаючих, відображенням поля зору з імітованої зовнішньої камери на тактичне поле, системою зв'язку з робочими місцями навчаючих, першим адаптером спряження з промисловою шиною даних, імітатором пульта управління стабілізатора для...
Попередній патент: Комплексний тренажер екіпажу бронетранспортера бтр-80
Наступний патент: Комплексний пілотажний тренажер екіпажу вертольота
Випадковий патент: Спосіб і пристрій (варіанти) для призначення потоків даних із заданими обмеженнями часових інтервалів передачі