Спосіб визначення значень фізичних величин за результатами їх непрямих вимірювань
Номер патенту: 100288
Опубліковано: 10.12.2012
Автори: Рачковський Дмитро Андрійович, Гриценко Володимир Ілліч, Ревунова Олена Георгіївна
Формула / Реферат
1. Спосіб визначення значень фізичних величин (х), які характеризують стан об'єктів, за результатами їх непрямих вимірювань (b'), отриманих існуючими засобами вимірювань та пов'язаних з шуканими значеннями фізичних величин (х) лінійним перетворенням b'=Ах+е, де e - вектор адитивного шуму, А (n на m) - відома матриця лінійного перетворення з великим числом обумовленості і має невизначений чисельний ранг (ряд сингулярних чисел плавно спадає до нуля), який передбачає дії:
отримання результатів непрямих вимірювань фізичної величини (b') та відповідний вибір матриці лінійного перетворення А;
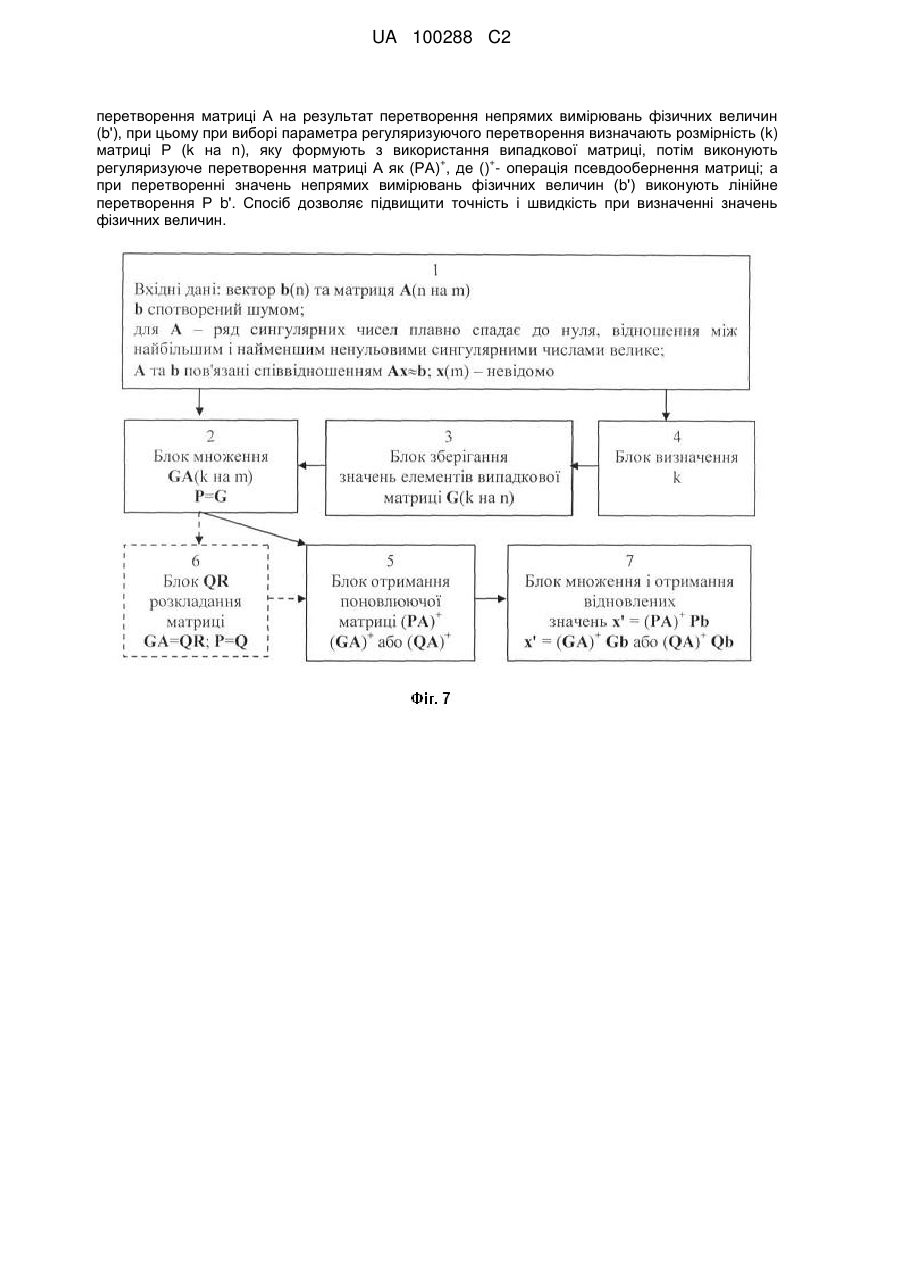
визначення матриці поновлюючого перетворення (Z) в блоці отримання поновлюючої матриці (5) з використанням матриці лінійного перетворення (А) та з урахуванням параметра регуляризації;
визначення шуканих значень фізичних величин (х') в блоці множення і отримання відновлених значень (7) шляхом множення матриці поновлюючого перетворення (Z) на результат непрямих вимірювань фізичних величин (b'): х'=Zb';
який відрізняється тим, що
визначають цілочисельний параметр регуляризації (k) в блоці визначення регуляризуючого параметра (4) з використанням вибраної матриці лінійного перетворення (А) та результатів непрямих вимірювань фізичної величини (b') за існуючими критеріями, що дозволяють вибирати оптимальне число членів в лінійних за параметрами регресійних моделях;
формують матрицю проекційного перетворення Ρ в блоці множення (2) з використанням випадкової матриці з блока зберігання значень елементів випадкової матриці (3), причому число рядків матриці Ρ дорівнює значенню к, а число стовпців матриці Ρ дорівнює значенню n;
визначають матрицю відновлюючого перетворення (Ζ) в блоці отримання поновлюючої матриці (5) як Ζ=(ΡΑ)*Ρ, де (РА)* - операція псевдообернення матриці РА:
причому вказані дії виконують в автоматичному режимі на відповідних функціональних блоках комп'ютера.
2. Спосіб за п. 1, який відрізняється тим, що матрицю проекційного перетворення Ρ формують як випадкову матрицю з випадковими елементами, які вибрані з Гаусова розподілу.
3. Спосіб за п. 1, який відрізняється тим, що матрицю проекційного перетворення Ρ формують як випадкову матрицю з випадковими елементами, які вибрані з рівномірного розподілу.
4. Спосіб за п. 1, який відрізняється тим, що матрицю проекційного перетворення Ρ формують як матрицю з ортонормованими стовпцями, які отримують в результаті QR- або SVD- розкладання матриці GA, де G - випадкова матриця з елементами, вибраними з Гаусова або рівномірного розподілу.
5. Спосіб за одним із пп. 1-4, який відрізняється тим, що цілочисельний параметр регуляризації (k) визначають за критеріями регуляризації Тихонова, такими як критерій L-кривої, узагальненої нев'язки, узагальненої перехресної перевірки, та ін.
6. Спосіб за одним із пп. 1-4, який відрізняється тим, що цілочисельний параметр регуляризації (k) визначають за критеріями, що застосовуються в статистичних моделях, які включають, але не вичерпуються критеріями Акаіке, Маллоуза, Бін Ю, та ін.
Текст
Реферат: Спосіб визначення значень фізичних величин за результатами їх непрямих вимірювань належить до області обчислювальної техніки, методів та способів обробки даних. Спосіб визначення значень фізичних величин (х) за результатами їх непрямих вимірювань (b'), пов'язаних з невідомими значеннями фізичних величин (х) лінійним перетворенням b' = Ах+е, де e - невідомий вектор адитивного шуму, А - відома матриця (n на m) лінійного перетворення, що є погано обумовленою (число обумовленості велике) і має невизначений чисельний ранг (ряд сингулярних чисел плавно спадає до нуля), який передбачає отримання відомих результатів непрямих вимірювань фізичних величин (b') і відомої матриці лінійного перетворення А, вибір параметра регуляризуючого перетворення, регуляризуюче перетворення матриці А, перетворення значень непрямих вимірювань фізичних величин (b'), визначення значень фізичних величин (х') шляхом множення результату регуляризуючого UA 100288 C2 (12) UA 100288 C2 перетворення матриці А на результат перетворення непрямих вимірювань фізичних величин (b'), при цьому при виборі параметра регуляризуючого перетворення визначають розмірність (k) матриці Р (k на n), яку формують з використання випадкової матриці, потім виконують + + регуляризуюче перетворення матриці А як (РА) , де () - операція псевдообернення матриці; а при перетворенні значень непрямих вимірювань фізичних величин (b') виконують лінійне перетворення Р b'. Спосіб дозволяє підвищити точність і швидкість при визначенні значень фізичних величин. UA 100288 C2 5 Винахід належить до області обчислювальної техніки, методів та способів обробки даних, і може бути використаний для стійкого визначення числових значень фізичних величин за результатами їх непрямих вимірювань. Значення фізичних величин в різних точках простору вимірюються за допомогою технічних вимірювальних засобів. Вимагається визначити значення фізичних величин за результатами вимірювань. Вимірювальні засоби розташовані на відстані від точок простору, в яких вимагається отримати значення фізичних величин. В результаті взаємодії з середовищем і особливостей технічних вимірювальних засобів, значення фізичних величин трансформуються в результати вимірювань лінійним перетворенням. Це перетворення описується виразом: 10 Ах≈b, 15 20 25 (1) де вектор b - результат вимірювань; вектор x - невідомі значення фізичної величини, які потрібно визначити; А - відома матриця, яка описує лінійне перетворення невідомих значень фізичних величин у відомі результати вимірювань. Задача оцінювання невідомих значень x для випадку, коли відоме лінійне перетворення А має наступні властивості: ряд сингулярних чисел плавно спадає до нуля; відношення між найбільшим і найменшим ненульовими сингулярними числами велике; значення b містять шум, - називається дискретною некоректною задачею [Hansen P.С. Rank-deficient and discrete illposed problems. Numerical Aspects of Linear Inversion. - SIAM, Philadelphia, 1998.-247 p.]. Рішенням дискретної некоректної задачі є відновлені значення х, які для описуваного випадку є значеннями фізичної величини. Проте для А, х, b іншої природи x може бути даними будь-якої природи. Тому цей винахід призначений для вирішення будь-яких дискретних некоректних задач. Відомий спосіб рішення дискретної некоректної задачі, тобто оцінювання значень х, здійснюється за допомогою звичайного псевдообернення матриці даних лінійного перетворення А. Згідно з цим способом, невідомі значення x знаходять шляхом множення вектора b на + матрицю А , яка є псевдозворотною для матриці А: + x'pinv=A b. 30 35 40 (2) + Матрицю А , яка є псевдозворотною для матриці А, відшукується у вигляді добутку трьох T матриць: матриць лівих U і правих V сингулярних векторів і зворотної матриці сингулярних -1 значень S : + -1 T А =VS U Відомий метод має наступні недоліки: T - необхідність розкладання по сингулярних значеннях (SVD) відомої матриці А=USV , яке має велику обчислювальну складність О(mn min{m;n}); - нестійкість і низька точність. Точність оцінювання рішення х' цим відомим способом прийнятна тільки при дуже малому шумі в b. Найбільш близьким до пропонованого в цьому винаході способу є спосіб оцінювання x за допомогою регуляризації Тихонова [Hansen P.C. Rank-deficient and discrete ill-posed problems. Numerical Aspects of Linear Inversion. - SIAM, Philadelphia, 1998.-247 p., Тихонов А.Н., Арсенин В.Я. Методы решения некорректных задач. - Μ.: Наука, 1979.-285 с.]. У цьому способі рішення х + оцінюється шляхом множення b на відновлюючу матрицю ATihonov : + х'=ATihonov b. 45 50 55 (3) + Відновлююча матриця ATihonov відшукується шляхом розкладання відомої матриці лінійного перетворення А на добуток трьох матриць: матриць лівих і правих сингулярних векторів і зворотної матриці сингулярних значень (1/i), зваженої фільтруючими множниками fi, отриманими з урахуванням спеціально підібраного параметра регуляризації λ: + T ATihonov =Vdiag (fi/i)U , 2 2 2 де fi= i/( i+ ) - фільтруючі множники. Проте цей відомий спосіб має недоліки: - велика обчислювальна складність. Потрібно розкладання по сингулярних значеннях T А=USV з великою складністю О(mn min{m;n}); - необхідність підбору адекватного параметра регуляризації , що вимагає додаткових обчислень і не завжди дозволяє досягти потрібного результату, тобто не завжди забезпечується стійке і точне рішення х'. 1 UA 100288 C2 5 10 15 20 25 30 У винаході поставлено задачу створення вдосконаленого шляхом підвищення обчислювальної ефективності способу рішення дискретної некоректної задачі, який дає стійке і точне відновлення невідомих числових значень фізичної величини за результатами її непрямих вимірювань або будь яких інших прикладів дискретних некоректних задач. Актуальність такого способу рішення дискретних некоректних задач обумовлена тим, що дискретні некоректні задачі зустрічаються в таких галузях науки і техніки, де існує необхідність роботи й прийняття рішення в реальному часі, прискорення обробки великих масивів вимірювальних даних. Типові приклади дискретних некоректних задач виникають при дискретизації безперервних некоректних задач, таких як інтегральні рівняння Фредгольма першого роду. Важливі задачі спектрометрії [Забулонов Ю.Л., Коростиль Ю.М., Ревунова Е.Г. Оптимизация решения обратной задачи по восстановлению функции плотности распределения поверхностных загрязнений // Сборник научных трудов ИПМЭ НАН Украины "Моделирование и информационные технологии".-2006. - С. 77-83.], гравіметрії [Булах Е.Г. О новом аппроксимационном подходе к решению обратных задач гравиметрии в классе трехмерных контактных поверхностей // Докл. НАНУ.-2006. - № 1. - С. 108-112.], магнітометрії [Strakhov V.N. The fundamental computational problem in gravimetry, magnetometry, geodesy, and geoinformatics, Izvestiya Physics of the Solid Earth, 44(2): 142-157, 2008.], електричної розвідки [Хмелевский В.К., Бондаренко В.М. Электроразведка. - Μ.: Недра, 1999.-438 с.] та інші мають властивості дискретних некоректних задач. Поставлена технічна задача, а саме рішення дискретної некоректної зворотної задачі, вирішується використанням перетворення даних шляхом випадкової проекції. Випадкова проекція здійснюється за допомогою матриці Р, елементи якої - випадкові числа, генеровані з певним розподілом. Перетворення випадковими проекціями застосовуються останнім часом для різних задач. Наприклад, для перетворення даних початкового векторного простору у вторинний векторний простір із збереженням міри схожості векторів в початковому просторі. Алгоритми з перетворенням випадковими проекціями використовують також для задачі найменших квадратів, факторизації матриць, аналізу головних компонент та ін. Так, для зменшення обчислювальної складності рішення звичайної задачі найменших квадратів за допомогою випадкової проекції, відомі матриця А, а також вектор b множаться на випадкову матрицю Р, одна з розмірностей якої дорівнює відповідній розмірності А, а інша розмірність k - менша. За рахунок цього, розмірність РА менше розмірності А. Після проекції наближене рішення х' отримують як: + х' - (РА) (Рb). (4) 35 40 45 50 55 Його обчислювальна складність менша, ніж для рішення (2), оскільки здійснюється + псевдообернення (РА) матриці РА, розмірність якої менше розмірності А. Дослідники цієї задачі (наприклад, [Drineas P., Mahoney M.W., Muthukrishnan S., Sarlos T. Faster least squares approximation // Tech. Rep. 0710.1435.-2007.]) доводять, що рішення х' по формулі (4) з ростом k наближається до рішення за допомогою псевдообернення по наведеній + вище формулі (2) х'pinv=А b. Це доведення проведено для випадку, коли вектор b не спотворений шумом, матриця А є добре обумовленою і має повний ранг. Проте у конкретному випадку дискретної некоректної задачі, що розглядається нами, матриця А погано обумовлена і має невизначений чисельний ранг, а права частина b спотворена адитивним шумом, рішення (2), як вже згадувалося вище, нестійке і дає неприйнятно низьку точність. Тому для дискретної некоректної задачі близькість рішення х', отриманого із застосуванням випадкової проекції, до рішення х'pinv є небажаною. Винаходом пропонується для вирішення дискретної некоректної задачі (Ах=b, де А - погано обумовлена і з невизначеним чисельним рангом матриця, вектор b спотворений шумом) використовувати попереднє перетворення матриці А шляхом множення (проекції) матриці А на матрицю даних, яка є згаданою вище випадковою матрицею Р, проте з розмірністю k, яка залежить від зашумленості вектора правої частини b, так що рішення початкової дискретної некоректної задачі, отримане з використанням псевдообернення результуючої матриці (4), виявляється стійким і точним, і не вимагає застосування методів регуляризації Тихонова (3). Таким чином, за запропонованим способом, стійке і точне відновлення сигналу шляхом рішення дискретної некоректної задачі отримують таким чином + х'=(РА) Рb, + + T T де (РА) обчислюється як (РА) =Vdiag(1/i)U , PA=Udiag(i)V . 2 UA 100288 C2 5 10 15 20 25 30 35 40 45 50 55 Відзначимо, що як матриця проектора може використовуватися не тільки безпосередньо матриця Р, сформована значеннями випадкових величин, а й матриця, отримана з її використанням. Наприклад, матриця Q отримана в результаті qr-розкладання [Demmel J.W. Applied Numerical Linear Algebra. - SI AM, Philadelphia.-1997. 419 p.] матриці PA. Перевагами запропонованого способу є підвищення очності визначення шуканих значень величин при зменшенні часу на їх обчислення. Розмірність РА (k на m), складність розкладання РА по сингулярних значеннях дорівнює О(km min{m;k}), що при k
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for the determination of magnitudes of physical quantities
Автори англійськоюHrytsenko Volodymyr Illich, Rachkovskyi Dmytro Andriiovych, Revunova Olena Heorhiivna
Назва патенту російськоюСпособ определения значений физических величин по результатам их косвенных измерений
Автори російськоюГриценко Владимир Ильич, Рачковский Дмитрий Андреевич, Ревунова Елена Георгиевна
МПК / Мітки
МПК: G06F 17/16, G06F 17/00
Мітки: вимірювань, значень, фізичних, визначення, спосіб, величин, результатами, непрямих
Код посилання
<a href="https://ua.patents.su/11-100288-sposib-viznachennya-znachen-fizichnikh-velichin-za-rezultatami-kh-nepryamikh-vimiryuvan.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення значень фізичних величин за результатами їх непрямих вимірювань</a>
Волоконно-оптична система інтервальних вимірювань фізичних величин
Номер патенту: 54286
Опубліковано: 17.02.2003
Автор: Шабатура Юрій Васильович
МПК: H04B 10/00
Мітки: фізичних, система, величин, волоконно-оптична, інтервальних, вимірювань
Формула / Реферат:
Волоконно-оптична система інтервальних вимірювань фізичних величин, що містить послідовно з'єднані за допомогою відрізків волоконних світловодів випромінювач, n волоконно-оптичних датчиків і фотоприймач, вихід якого з'єднаний з блоком обробки, яка відрізняється тим, що датчики виконані як вимірювальні блоки, на вході кожного з яких встановлений оптичний розгалужувач, перший вихід якого з'єднаний з коротким відрізком волоконного світловоду...
Спосіб вимірювання фізичних величин
Номер патенту: 38414
Опубліковано: 15.05.2001
Автори: Водотовка Володимир Ілліч, Репа Федір Михайлович
МПК: G01R 19/00
Мітки: фізичних, величин, спосіб, вимірювання
Формула / Реферат:
Спосіб вимірювання фізичних величин, що включає перше вимірювання обернено перетвореної фізичної величини (ФВ) х, друге вимірювання при зміні в q<1 разів чутливості оберненого перетворення ФВ, який відрізняється тим, що виконують додатково третє і четверте вимірювання, причому перед третім вимірюванням до вимірюваної ФВ додають сигнал еталонної ФВ х0, перед четвертим вимірюванням встановлюють чутливість...
Рекурентний спосіб оптимального керування комплексуванням вимірників при нерівно точних вимірах фізичних величин
Номер патенту: 45289
Опубліковано: 10.11.2009
Автори: Конахович Георгій Филимонович, Ігнатов Володимир Олексійович, Нікулін В'ячеслав Ігорович, Кудренко Станіслава Олексіївна
МПК: G01C 3/00
Мітки: вимірах, комплексуванням, фізичних, спосіб, величин, оптимального, рекурентний, точних, нерівної, керування, вимірників
Формула / Реферат:
Рекурентний спосіб оптимального керування комплексуванням вимірників при нерівно точних вимірах фізичних величин, у якому для вимірювання значення фізичної величини послідовно, такт за тактом, застосовують m≥2 вимірювальних систем з різними погрішностями вимірювань, результати вимірювань запам'ятовують і по них за допомогою формул непрямих вимірювань обчислюють істинне значення фізичної величини, який відрізняється тим, що оптимальну...
Спосіб вимірювання декількох фізичних величин за допомогою п’єзоелемента
Номер патенту: 45979
Опубліковано: 10.12.2009
Автори: Дідук Віталій Андрійович, Коваленко Анна Михайлівна, Куценко Станіслав Васильович, Мусієнко Максим Павлович
МПК: G01L 1/16, G01P 15/09
Мітки: п'єзоелемента, спосіб, вимірювання, допомогою, величин, фізичних, декількох
Формула / Реферат:
Спосіб вимірювання декількох фізичних величин за допомогою п'єзоелемента, який здійснюється за допомогою одночасної дії на п'езоелемент декількох електричних коливань, який відрізняється тим, що збудження коливань в п'єзоелементі здійснюється за допомогою електричних сигналів різної форми, що підводяться до п'єзоелемента від генераторів електричних сигналів через додаткові електроди, при цьому кількість форм сигналів відповідає кількості...
Спосіб вимірювання фізичних величин
Номер патенту: 42472
Опубліковано: 15.10.2001
Автори: Репа Федір Михайлович, Водотовка Володимир Ілліч
МПК: G01R 19/00
Мітки: фізичних, спосіб, величин, вимірювання
Формула / Реферат:
Спосіб вимірювання фізичних величин (ФВ), що включає знаходження залежності між результатами проміжних вимірів ФВ x і зразковою мірою x0 при масштабуванні останньої, вимірювання масштабно перетвореної міри та визначення значення ФВ за отриманою залежністю, який відрізняється тим, що по черзі при одному і тому ж масштабі вимірюють значення ФВ та зразкової міри, змінюють масштаб при вибраній границі вимірювання ФВ, повторно вимірюють значення...
Попередній патент: Електродне покриття для зварювання різнорідних сталей
Наступний патент: Спосіб фіксації термінальної частини сухожилка розгинача пальця кисті
Випадковий патент: Спосіб транспозиції сосочко-ареолярного комплексу при естетичній маммопластиці