Мікропроцесорний пристрій захисту й контролю роботи механізмів мостових кранів
Номер патенту: 57816
Опубліковано: 10.03.2011
Автори: Ткаченко Григорій Іванович, Вайнер Аркадій Йосипович, Мохнатий Олексій Володимирович, Денисик Дмитро Ігорович, Бесараб Сергій Михайлович, Хижняк Вячеслав Якович, Коротченков Валерій Михайлович
Формула / Реферат
1. Мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів, що містить блок датчиків параметрів крана, блок обробки даних і блок контролю, реєстрації та зберігання даних про роботу крана, який відрізняється тим, що він додатково оснащений блоком (5) гальванорозв'язки і нормалізації вхідних-вихідних сигналів контролера (6), блоком (1) динамічного гальмування, підключеним входами до ліній живлення крана, а виходами до двох статорних обмоток двигуна, при цьому сигнали керування блока (1) підключені до виходів модулів блока (5) гальванічної розв'язки 5.3 (МГР3), а також блоком (4) безперебійного живлення (ДБЖ), вхід якого підключений до мережі змінного струму (220 В, 50 Гц), а вихід - до контролера (6); при цьому блок датчиків параметрів крана складається із блока (2) первинних датчиків струму, що являють собою шунти або трансформатори струму, включені в силовий ланцюг двигуна, виходи шунтів або трансформаторів струму підключені до входів модуля блока (5) гальванічної розв'язки (5.1) (МГР1) і блока датчиків температури (3), встановлених на корпуси двигунів або безпосередньо в їх статорні обмотки з виходами датчиків, підключеними до входів модулів блока (5) гальванічної розв'язки (5.3) (МГР3); блок обробки даних складається із блока (7) GSM-модемів, підключених: GSM (7.1) - до контролера (6), GSM (7.2) - до блока (8) вводу-виводу даних (пульт машиніста) і GSM (7.3) - до блока (9) (робоча станція); а блок контролю, реєстрації та зберігання даних про роботу крана складається із блока контролера (6), що приймає сигнали датчиків і видає сигнали керування в блок (5) гальванорозв'язки (модулі МГР1...МГР3), а також через блок (7) GSM-модемів обмінюється даними із блоком (8) вводу-виводу даних і блоком 9 (робочою станцією), із блока (8) вводу-виводу даних, зв'язаного з контролером (6) GSM-модемами (7.1) і (7.2), і із блока (9) (робоча станція), зв'язаного з контролером (6) GSM-модемами (7.1) і (7.3).
2. Мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що час роботи і-го механізму розраховують за формулами:
за умови, що Ii ≠ 0,
де: tЗВі (tЗНі) - момент часу зникнення сигналу "Вперед" ("Назад");
![]() - момент часу появи сигналу "Вперед" ("Назад");
- момент часу появи сигналу "Вперед" ("Назад");
![]() - час руху механізму вперед (назад);
- час руху механізму вперед (назад);
tк - проміжок часу реєстрації, наприклад: година, зміна й т.д.;
ТВ, ТН - "чистий" час роботи механізму вперед, назад за час tк;
ТР - "чистий" час роботи механізму за проміжок часу реєстрації;
Ii - струм і-го механізму.
3. Мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що витрати електроенергії і-го механізму визначають за виразами:
P=3·UIcosφ,
![]()
де: U - фазна напруга;
B, Ii - значення діючих струмів у кожний проміжок часу Δτ, сек;
cosφ - середньозважений коефіцієнт потужності по цеху.
4. Мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що сигнал заборони на виконання реверса в режимі противключення (Uзв) і сигнал на гальмування (Uг) з появою команди "Вперед" на номінальній швидкості пересування "Назад" видається:
Uзв=1, Uг=1, якщо: I≥0,7·Ін і при tпв-tзн£tзі,
де І - виміряне значення струму;
Ін - номінальне значення струму двигуна;
tзн - момент часу зняття команди "Назад";
tпв - момент часу появи команди "Вперед";
tзi - тут і далі заданий інтервал часу, величину якого визначають при налагодженні.
5. Мікропроцесорний пристрій захисту й контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що сигнал заборони на виконання реверса в режимі противключення (Uзв) і сигнал на гальмування (Uг) з появою команди "Вперед" на номінальній швидкості пересування "Назад" знімається:
Uзв=0, Uг=0, якщо: I£0,35·Ін і при t-tпв≥tзі,
де t - показання годинника.
6. Мікропроцесорний пристрій захисту й контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що сигнал заборони на виконання реверса в режимі противключення (Uзн) і сигнал на гальмування (Uг) з появою команди "Назад" на номінальній швидкості пересування "Вперед" видається:
Uзн=1, Uг=1, якщо: I≥0,7·Ін і при tпн-tзв£tзі,
де І - виміряне значення струму;
Ін - номінальне значення струму двигуна;
tзв - момент часу зняття команди "Вперед";
tпн - момент часу появи команди "Назад".
7. Мікропроцесорний пристрій захисту й контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що сигнал заборони на виконання реверса в режимі противключення (Uзн) і сигнал на гальмування (Uг) з появою команди "Назад" на номінальній швидкості пересування "Вперед" знімається:
Uзн=0, Uг=0, якщо: I£0,35·Ін і при t-tпн≥tзі,
де t - показання годинника,
сигнал про перевищення різниці навантажень двигунів моста Uпрн = 1,
якщо Ідв1 - Ідв2 ![]() 0,3·Ін, де 0,3·Ін - абсолютна різниця струмів щодо номінального.
0,3·Ін, де 0,3·Ін - абсолютна різниця струмів щодо номінального.
8. Мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що сигнал про перевищення різниці часів появи навантаження на двигунах моста Uпpч = 1, якщо /t1-t2/³tзi,
де t1 - момент часу появи струму двигуна 1;
t2 - момент часу появи струму двигуна 2.
Текст
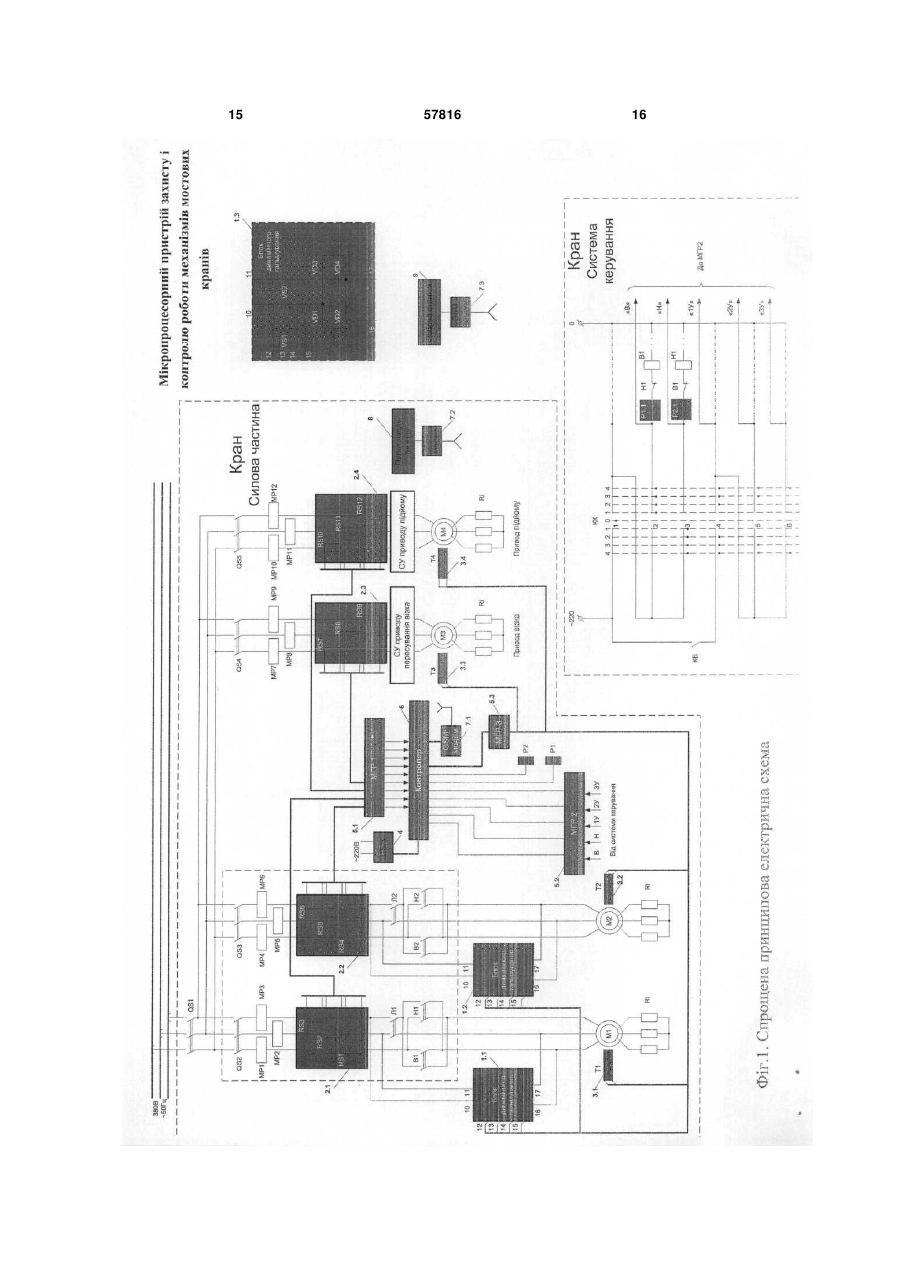
1. Мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів, що містить блок датчиків параметрів крана, блок обробки даних і блок контролю, реєстрації та зберігання даних про роботу крана, який відрізняється тим, що він додатково оснащений блоком (5) гальванорозв'язки і нормалізації вхідних-вихідних сигналів контролера (6), блоком (1) динамічного гальмування, підключеним входами до ліній живлення крана, а виходами до двох статорних обмоток двигуна, при цьому сигнали керування блока (1) підключені до виходів модулів блока (5) гальванічної розв'язки 5.3 (МГР3), а також блоком (4) безперебійного живлення (ДБЖ), вхід якого підключений до мережі змінного струму (220 В, 50 Гц), а вихід - до контролера (6); при цьому блок датчиків параметрів крана складається із блока (2) первинних датчиків струму, що являють собою шунти або трансформатори струму, включені в силовий ланцюг двигуна, виходи шунтів або трансформаторів струму підключені до входів модуля блока (5) гальванічної розв'язки (5.1) (МГР1) і блока датчиків температури (3), встановлених на корпуси двигунів або безпосередньо в їх статорні обмотки з виходами датчиків, підключеними до входів модулів блока (5) гальванічної розв'язки (5.3) (МГР3); блок обробки даних складається із блока (7) GSMмодемів, підключених: GSM (7.1) - до контролера (6), GSM (7.2) - до блока (8) вводу-виводу даних (пульт машиніста) і GSM (7.3) - до блока (9) (робоча станція); а блок контролю, реєстрації та 2 3 57816 4 де: U - фазна напруга; B, Ii - значення діючих струмів у кожний проміжок часу Δτ, сек; cosφ - середньозважений коефіцієнт потужності по цеху. 4. Мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що сигнал заборони на виконання реверса в режимі противключення (Uзв) і сигнал на гальмування (Uг) з появою команди "Вперед" на номінальній швидкості пересування "Назад" видається: Uзв=1, Uг=1, якщо: I≥0,7·Ін і при tпв-tзнtзі, де І - виміряне значення струму; Ін - номінальне значення струму двигуна; tзн - момент часу зняття команди "Назад"; tпв - момент часу появи команди "Вперед"; tзi - тут і далі заданий інтервал часу, величину якого визначають при налагодженні. 5. Мікропроцесорний пристрій захисту й контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що сигнал заборони на виконання реверса в режимі противключення (Uзв) і сигнал на гальмування (Uг) з появою команди "Вперед" на номінальній швидкості пересування "Назад" знімається: Uзв=0, Uг=0, якщо: I0,35·Ін і при t-tпв≥tзі, де t - показання годинника. 6. Мікропроцесорний пристрій захисту й контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що сигнал заборони на виконання реверса в режимі противключення (Uзн) і сигнал на гальмування (Uг) з появою команди "Назад" на номінальній швидкості пересування "Вперед" видається: Uзн=1, Uг=1, якщо: I≥0,7·Ін і при tпн-tзвtзі, де І - виміряне значення струму; Ін - номінальне значення струму двигуна; tзв - момент часу зняття команди "Вперед"; tпн - момент часу появи команди "Назад". 7. Мікропроцесорний пристрій захисту й контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що сигнал заборони на виконання реверса в режимі противключення (Uзн) і сигнал на гальмування (Uг) з появою команди "Назад" на номінальній швидкості пересування "Вперед" знімається: Uзн=0, Uг=0, якщо: I0,35·Ін і при t-tпн≥tзі, де t - показання годинника, сигнал про перевищення різниці навантажень двигунів моста Uпрн = 1, якщо Ідв1 - Ідв2 0,3·Ін, де 0,3·Ін - абсолютна різниця струмів щодо номінального. 8. Мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів за п. 1, який відрізняється тим, що сигнал про перевищення різниці часів появи навантаження на двигунах моста Uпpч = 1, якщо /t1-t2/tзi, де t1 - момент часу появи струму двигуна 1; t2 - момент часу появи струму двигуна 2. Корисна модель відноситься до підйомнотранспортного устаткування та може бути використана у системах захисту та обліку роботи кранів. Відомий спосіб контролю і реєстрації роботи вантажопідйомного крану, що включає передачу команд керування з розташованого поза крану пульта дистанційного керування з використанням лінії двостороннього бездротового зв'язку, вимірювання робочих параметрів крану, перетворення виміряних величин у цифрові сигнали, визначення припустимого навантаження та граничних положень обладнання крану і відключення його механізмів, коли фактичне навантаження на кран перевищить припустиме значення або при досягненні граничних положень устаткування, запис на крані керуючих та інформаційних сигналів і часу їхньої появи в довгострокову енергонезалежну пам'ять з можливістю зчитування за необхідності, а також їхню дистанційну передачу по провідній лінії зв'язку на розташовану поза краном станцію диспетчерського контролю, реєстрації та зберігання даних про роботу крану. Даний спосіб реалізований у системі керування, контролю й реєстрації роботи вантажопідйомного крану, що містить цифровий блок обробки даних (електронний блок контролю й керування), що включає реєстратор даних, датчики параметрів крану, прийомопередаваючий радіомодуль, пульт дистанційного керування краном, що включає клавіатуру та прийомопередаваючий модуль, і цифрову станцію диспетчерського контролю, реєстрації та зберігання даних про роботу крану (термінал оператора або термінал дистанційного керування), підключену до цифрового блоку обробки даних [див. патент РФ № 2259579, G 05В 19/05, 27.08.2005]. Відомий спосіб не забезпечує систему необхідною надійністю контролю та реєстрації робочих параметрів крану через складність передачі інформації з розташованого на крані електронного блоку керування й контролю на термінал оператора або термінал дистанційного керування, розташований відносно далеко від крана, з використанням провідної лінії зв'язку. Недоліком системи, що реалізує даний спосіб, є також складність її монтажу на крані з використанням провідних ліній зв'язку між датчиками, розташованими на рухливих елементах крану та мікропроцесором, а також значна трудомісткість налагодження системи на кранах великого розміру (висоти). Відома також система керування вантажопідйомним краном з контролем і реєстрацією його роботи [див. патент РФ № 2328443 від 19.09.2006 p.], що містить цифровий блок обробки даних, до якого підключені датчики параметрів крану, реєстратор параметрів крану і прийомопередаваючий радіомодуль, пульт 5 дистанційного керування, що включає клавіатуру й прийомопередаваючий радіомодуль, та цифрову станцію диспетчерського контролю, реєстрації і зберігання даних про роботу крана, при цьому пульт дистанційного керування зв'язаний лініями двостороннього бездротового зв'язку з датчиками параметрів крану та цифровою станцією диспетчерського контролю реєстрації і зберігання даних та виконаний з можливістю видачі додаткових керуючих команд на датчики параметрів крану для калібрування системи і для прийому інформації про поточні параметри крану та їх запис, а також з можливістю передачі прийнятої інформації на цифрову станцію диспетчерського контролю, реєстрації і зберігання даних про роботу крану, окрім цього, датчики параметрів крану та цифрова станція диспетчерського контролю реєстрації і зберігання даних про роботу крану обладнані додатковими прийомопередаваючими радіомодулями, а всі прийомопередаваючі радіомодулі системи зв'язані між собою радіозв'язком, створюючи тим самим бездротову лінію послідовного інтерфейсу. Крім того, пульт дистанційного керування додатково оснащений блоком ідентифікації, блоком зчитування інформації, блоком настроювання системи та блоком запису інформації, при цьому вихід блоку керування підключений через блок ідентифікації до входів блоків зчитування, настроювання системи і запису інформації, виходи блоків настроювання системи і блоку запису інформації підключені до входів прийомопередаваючого радіомодуля пульта дистанційного керування, а блок зчитування інформації підключений до зазначеного радіомодуля за допомогою двосторонньої лінії зв'язку. Дана система керування вантажопідйомним краном із засобами захисту, контролю та реєстрації його роботи є найбільш близькою до технічного рішення, що заявляється (мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів) і обрана як прототип. Недоліком даної системи є те, що система не забезпечує: - контролю стану ланцюгів захисту від спроби використання режиму проти включення та заборони його реалізації; - режим електричного гальмування; - контроль моментів подачі напруги на двигуни мосту, - контроль різниці навантажень двигунів мосту, - контроль температури обмоток двигунів; облік спожитої електроенергії; - автоматичне виявлення факту навмисного виведення пристрою з роботи; - підтримка напруги живлення на засобах контролю та обліку при короткочасному зникненні напруги живлення; - видачу поточних та архівних даних машиністові крану. Сукупними ознаками технічного рішення, що заявляється (мікропроцесорного пристрою захисту 57816 6 і контролю роботи механізмів мостових кранів) інайближчого аналогу (прототипу) є: - блок датчиків параметрів крана, - блок обробки даних, - блок контролю, реєстрації і зберігання даних про роботу крана. В основу корисної моделі поставлено задачу удосконалення мікропроцесорного пристрою захисту і контролю роботи механізмів мостових кранів за рахунок підвищення надійності контролю та реєстрації робочих параметрів крану шляхом створення додаткових засобів захисту, контролю й реєстрації робочих параметрів крана, що дозволить забезпечити високу ефективність його роботи. Зазначений технічний результат досягається тим, що мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів, що містить блок датчиків параметрів крана, блок обробки даних і блок контролю, реєстрації та зберігання даних про роботу крана, відповідно до технічного рішення, що заявляється, додатково оснащений блоком (5) гальванорозв'язки і нормалізації вхідних-вихідних сигналів контролеру (6), блоком (1) динамічного гальмування, підключеного входами до силових ліній живлення крану, а виходами до двох статорних обмоток двигуна, при цьому сигнали керування блоку (1) підключені до виходів модулів блоку (5) гальванічної розв'язки 5.3 (МГРЗ), а також блоком (4) безперебійного живлення (БПЖ), вхід котрого підключено до мережі змінного струму (220 В, 50 Гц), а вихід - до контролеру (6), при цьому блок датчиків параметрів крану складається із блоку (2) первинних датчиків струму, наприклад , шунти або трансформатори струму, включені в силові ланцюги двигуна, виходи шунтів або трансформаторів струму, підключені до входів модулів блоку (5) гальванічної розв'язки 5.1 (МГР1), і блоку датчиків температури (3), встановлених на корпуси двигунів або безпосередньо в їхні статорні обмотки з виходами датчиків, підключених до входів модуля блоку (5) гальванічної розв'язки 5.3 (МГР1); блок обробки даних, що складається із блоку (7) GSM-модемів, підключених: GSM 7.1 - до контролеру (6), GSM 7.2 до блоку (8) вводу-виводу даних (пульта машиніста) і GSM 7.3 до блоку (9) (робочої станції); а блок контролю, реєстрації і зберігання даних про роботу крану - із блоку контролера (6), що приймає сигнали датчиків і видає сигналів керування в блок (5) гальванорозв'язки (модулі МГР 1 - МГР 3), а також через блок (7) GSMмодемів обмінюється даними із блоком (8) вводувиводу даних (пультом машиніста) і блоком 9 (робочою станцією), із блоку (8) вводу-виводу даних (пульта машиніста), зв'язаного з контролером (6) GSM-модемами 7.1 і 7.2, та з блоку (9) (робочої станції), зв'язаного з контролером (6) GSM-модемами 7.1 і 7.3; - час роботи і-го механізму розраховують за формулами: 7 57816 t ЗВі t ПВі tBi , t tк TB t Bi , t 0 t ЗHі t ПHі tHi , t tк TH t Hi, t 0 Tp Tв Tн, за умови, що Ii 0, де: t3Bi ( t3Hi) - момент часу зникнення сигналу «Вперед» («Назад»); t ПВі ( t ПHі ) - момент часу появи сигналу «Вперед» («Назад»); tВі ( tHі) час руху механізму вперед (назад); tк - проміжок часу реєстрації, наприклад: година, зміна й т.д.; ТВ, ТН - «чистий» час роботи механізму вперед, назад за час tк ; Тр - «чистий» час роботи механізму за проміжок часу реєстрації; Ii - струм і - го механізму. - витрати електроенергії і-го механізму визначається за виразами: P 3 U I cos , t tк I I, i t 0 де: U - фазна напруга, B, Ii - значення діючих струмів у кожний проміжок часу , сек, cos середньозважений коефіцієнт потужності по цеху; - сигнал заборони на виконання реверсу в режимі противключення (Uв) і сигнал на гальмування (Uг) з появою команди «Вперед» на номінальній швидкості пересування «Назад» видається: Uзв=1, Uг=1, якщо: I 0,7 Ін і при tпв-tзнtзі, де І - виміряне значення струму, Ін - номінальне значення струму двигуна, tзн - момент часу зняття команди «Назад», tпв - момент часу появи команди «Вперед», tзi - тут і далі заданий інтервал часу, величина якого визначається при налагодженні; - сигнал заборони на виконання реверсу в режимі противключення (Uв) і сигнал на гальмування (Uг) з появою команди «Вперед» на номінальній швидкості пересування «Назад» знімається: Uзв=0, Uг=0, якщо: I 0,35 Ін і при tпв-tзнtзі де t - показання годинника; - сигнал заборони на виконання реверсу в режимі противключения (Uзн) і сигнал на гальмування (Uг) з появою команди «Назад» на номінальній швидкості пересування «Вперед» видається: Uзв=1, Uг=1, якщо: I 0,7 Ін і при tпв-tзнtзі, де І - виміряне значення струму, Ін номінальне значення струму двигуна, tзв - момент 8 часу зняття команди «Вперед», tпн - момент часу появи команди «Назад»; - сигнал заборони на виконання реверсу в режимі противключення (Uзн) і сигнал на гальмування (Uг) з появою команди «Назад» на номінальній швидкості пересування «Вперед» знімається: Uзн =0, Uг = 0, якщо: I 0,35 Ін і при tпв-tзнtзі, де t - показання годинника; - сигнал про перевищення різниці навантажень двигунів моста Uпрн = 1, якщо Ідв1 - Ідв2 > 0,3 Ін, де 0,3 Ін - абсолютна різниця струмів щодо номінального. - сигнал про перевищення різниці часів появи навантаження на двигунах моста Uпpч = 1, якщо /t1-t2/tзi, де t1 - момент часу появи струму двигуна М1, t2 момент часу появи струму двигуна М2. Сутність технічного рішення, що заявляється (мікропроцесорного пристрою захисту і контролю роботи механізмів мостових кранів) полягає в наступному. При додатковому оснащенні мікропроцесорного пристрою захисту і контролю роботи механізмів мостових кранів блоком гальванорозв'язки й нормалізації вхідних-вихідних сигналів контролеру, а також блоком динамічного гальмування, підключеним входами до силових ліній живлення крану, а виходами до двох статорних обмоток двигуна, при підключенні сигналів керування блоку динамічного гальмування до виходів модуля блоку гальванічної розв'язки, а також при оснащенні мікропроцесорного пристрою захисту і контролю роботи механізмів мостових кранів блоком безперебійного живлення, вхід якого підключений до мережі змінного струму, а вихід - до контролеру, при виготовленні блоку датчиків параметрів крану, що складається із блоку первинних датчиків струму, котрі являють собою шунти або трансформатори струму, включені в силові лінії двигуна; з виходами шунтів або трансформаторів струму, підключеними до входів модулів блоку гальванічної розв'язки, і при виготовленні блоку датчиків параметрів крану, а також датчиків температури, встановлених на корпуси двигунів або безпосередньо в їхні статорні обмотки з виходами датчиків, підключеними до входів модуля блоку гальванічної розв'язки; при виготовленні блоку обробки даних, що складається із блоку GSM-модемів, підключених до контролеру, до блоку вводу-виводу даних (пульта машиніста) і до робочої станції; при виготовленні блоку контролю, реєстрації і зберігання даних про роботу крану, що складається із блоку контролера, що приймає гальванічно розв'язані сигнали датчиків і видає сигналів керування в блок гальванорозв'язки, а також через блок GSM-модемів, котрий обмінюється даними із блоком вводу-виводу даних (пультом машиніста) і робочою станцією, а також з блоку вводу-виводу даних (пульта машиніста), зв'язаного з контролером GSM-модемами, та з 9 57816 блоку робочої станції, пов'язаної з контролером GSM-модемами; при розрахунку часу роботи і-го механізму за формулами: tЗВі t ПВі tBi , tЗHі t ПHі tHi , TH t tк tHi , TB t tк t Bi , t 0 Tp Tв Tн, за t 0 умови, що Ii 0, де: t3Bi ( t3Hi) - момент часу зникнення сигналу «Вперед» («Назад»); t ПВі ( t ПHі ) - момент часу появи сигналу «Вперед» («Назад»); tВі ( tHі) - час руху механізму вперед (назад); tк - проміжок часу реєстрації, наприклад: година, зміна й т.д.; ТВ, ТН - «чистий» час роботи механізму вперед, назад за час tк ; Тр - «чистий» час роботи механізму за проміжок часу реєстрації; Ii - струм і - го механізму; при визначенні витрати електроенергії і-го механізму з виразу: P 3 U I cos , I t tк Ii, t 0 де: U - фазна напруга, B, Ii - значення діючих струмів у кожний проміжок часу , сек, cos -середньозважений коефіцієнт потужності по цеху; при видачі сигналу заборони на виконання реверсу в режимі противключення (Uв) і сигналу на гальмування (Uг) з появою команди «Вперед» на номінальній швидкості пересування «Назад»: Uзв=1, Uг=1, якщо: I 0,7 Ін і при tпв-tзнtзі, де І - виміряне значення струму, Ін - номінальне значення струму двигуна, tзн - момент часу зняття команди «Назад», tпв момент часу появи команди «Вперед», tзi - тут і далі заданий інтервал часу, величина якого визначається при налагодженні; при знятті сигналу заборони на виконання реверсу в режимі противключення (Uв) і сигналу на гальмування (Uг) з появою команди «Вперед» на номінальній швидкості пересування «Назад»: Uзв=0, Uг=0, якщо: I 0,35 Ін і при tпв-tзнtзі де t - показання годинника; при видачі сигналу заборони на виконання реверсу в режимі противключення (Uн) і сигналу на гальмування (Uг) з появою команди «Назад» при пересуванні на номінальній швидкості «Вперед»: Uн = 1, Uг = 1, Uзв=1, Uг=1, якщо: I 0,7 Ін і при tпв-tзнtзі, де І - виміряне значення струму, Ін - номінальне значення струму двигуна, tзв - момент часу зняття команди «Вперед», tпн - момент часу появи команди «Назад»; при знятті сигналу заборони на виконання реверса в режимі противключення (Uн) і сигналу на гальмування (Ur) з появою команди «Назад» на номінальній швидкості пересування «Вперед»: Uн=0, Uг=0, якщо: I 0,35 Ін і при tпвtзнtзі, де t - показання годинника; при знятті сигналу про перевищення різниці навантажень двигунів моста: моста Uпрн = 1, якщо Ідв1 - Ідв2 > 0,3 Ін, де 0,3 Ін - абсолютна різниця струмів щодо номінального; і при знятті сигналу про перевищення різниці часу появи навантаження на двигунах моста Uпpч = 1, якщо /t1-t2/tзi, де t1 10 момент часу появи струму двигуна 1, t2 - момент часу появи струму двигуна 2, за рахунок підвищення надійності контролю та реєстрації робочих параметрів крану шляхом створення додаткових засобів контролю і реєстрації робочих параметрів крану, забезпечується висока ефективність його роботи. Таким чином, сукупність відмітних ознак технічного рішення, що заявляється (мікропроцесорного пристрою захисту і контролю роботи механізмів мостових кранів) дозволяє досягти зазначений у корисній моделі технічний результат - підвищення ефективності роботи мікропроцесорного пристрою захисту і контролю роботи механізмів мостових кранів шляхом розширення його функціональних можливостей за рахунок введення додаткових засобів контролю й реєстрації робочих параметрів крана. Крім цього, сутність мікропроцесорного пристрою захисту і контролю роботи механізмів мостових кранів ілюструється графічним матеріалом, що заявляється, наведеним на фіг. 16. На фіг. 1 зображена спрощена принципова електрична схема мікропроцесорного пристрою захисту і контролю роботи механізмів мостових кранів, що заявляється. На фіг. 2 показані умовні графіки основних режимів роботи двигунів, а саме: а) нормальна робота; б) заклинювання; в) перенавантаження; г) руйнування механічного сполучення; tз.с. - час зростання струму; tрозг. - час розгону. На фіг. З наведена часово-струмова характеристика відключення двигуна при перевантаженнях. На фіг. 4 зображені часові діаграми алгоритму захисту від режиму противключення, а саме: а) з противключенням; б) з використанням захисту від противключення. На фіг. 5 представлений приклад даних, котрі видаються пристроєм на екран пульта машиніста, на якому позначено: А - мнемосхема стану кранових механізмів, Б - журнал подій, В - кнопки для взаємодії машиніста з системою захисту, 1 мигаюча зелена стрілка (факт переміщення теліжки вліво зі струмом, рівним 60А, температура двигуна 43 градуси), 2 - мигаюча зелена стрілка (факт підйому вантажу зі струмом, рівним 30А, температура двигуна 51 градус), 3 - чорна стрілка (факт зупинки приводу переміщення мосту), також представлено інформацію про реальну температуру двигунів. На фіг.6 показаний приклад даних, котрі видаються пристроєм на дисплей робочої станції, встановленої у цеху, де крани працюють цілодобово. Мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів містить у собі наступні елементи: Блок динамічного гальмування поз. 1, що складається з тиристорів VS1 і VS2, діодів VD1-VD4; блок первинних датчиків струму поз. 2, що складається із шунтів RS1-RS12, блок датчиків температури поз. З, що складається з датчиків температури Т1-Т4; блок безперебійного живлення поз. 4; блок гальванічної розв'язки поз. 11 5, що складається з підсилювачів і оптичних елементів гальванорозв'язки; контролер поз. 6, блок GSM-модемів поз. 7, що складається з елементів, що забезпечують двосторонній обмін даними між контролером і пультом машиніста та між контролером і робочою станцією; блок вводувиводу даних поз. 8 (пульт машиніста) і блок поз. 9 (робоча станція). Блок динамічного гальмування поз. 1, що складається з тиристорів VS1 і VS2, діодів VD1VD4, - підключений входами поз. 10, 11 до лінійній живлення крану, а виходами поз. 16, 17 до двох статорних обмоток двигунів М1 і М2, при цьому сигнали управління блоку поз. 1 (поз. 12, 13, 14 і 15) підключені до виходів модуля поз. 5.3 (МГРЗ) блоки гальванічної розв'язки поз. 5. Блок первинних датчиків струму поз. 2, що складається із шунтів RS1-RS12, поз.2.1- 2.4, включених у силові ланцюги двигунів М1, М2, МЗ і М4, з виходами, підключеними до входу модуля 5.1 (МГР1) блоку гальванічної розв'язки поз. 5. Блок датчиків температури поз. 3, що складається з датчиків температури Т1-Т4 поз. 3.1- поз. 3.4, встановлених на корпуси двигунів М1, М2, МЗ і М4 або безпосередньо в їхні статорні обмотки, виходи датчиків Т1, 12, ТЗ і Т4 підключені до входів модуля 5.3 (МГР1) блоку гальванічної розв'язки 5. Блок безперебійного живлення 4 (джерело безперебійного живлення - ДБЖ); вхід блоку 4 підключений до мережі 220 В, 50 Гц, а вихід - до контролера- 6. Блок гальванічної розв'язки 5, що складається з підсилювачів і оптичних елементів гальванорозв'язки 5.1 - 5.3, являє собою сукупність модулів (МГР 1, МГР 2 і МГР 3) гальванорозв'язки 5.1, 5.2 і 5.3 і нормалізації вхідних-вихідних сигналів Контролера поз. 6. Контролер 6 приймає сигнали датчиків і видає двопозиційні (релейні) сигнали керування Р1 і Р2 у систему керування, а також через GSM-модеми 7.1, 7.2 і 7.3 блоку GSM-модемів 7 обмінюється даними із блоком вводу-виводу даних 8 (пульт машиніста) і блоком 9 (робоча станція). Блок GSM-модемів 7, що складається з елементів, що забезпечують двосторонній обмін даними між контролером і пультом машиніста та між контролером і робочою станцією 7.1 - 7.3, через GSM-модем - 7.1 підключений до контролера 6, через GSM-модем 7.2 - до блоку вводу-виводу даних 8 (пульту машиніста) і через GSM-модем 7.3 - до блоку -9 (робочої станції). Блок вводу-виводу даних 8 (пульт машиніста) зв'язаний з контролером поз. 6 через GSM-модеми 7.1 і 7.2. Блок 9 (робоча станція) зв'язаний з контролером 6 GSM-модемами 7.1 і 7,3. Блоки 1...7 встановлюються на мостовому крані поблизу існуючих засобів регулювання, блоки 8 і 7.2 встановлюються в кабіні машиніста, а блоки 9 і 7.3 - у диспетчерській. Крім того, принципова схема крану містить наступні елементи: - автоматичні вимикачі (QS1, QS2, QS3, QS4 і QS5); 57816 12 - максимально-струмові реле (МР1, МР2, МРЗ, МР4, МР5, МР6, МР7, МР8, МР9, МР10, МР11 і МР12); - двигуни (М1, М2, МЗ і М4); - роторні резистори (Ri); - лінійні контактори Л1 і Л2; - контактори «Вперед» (В1 і В2); - контактори «Назад» (Н1 і Н2). Мікропроцесорний пристрій захисту і контролю роботи механізмів мостових кранів працює наступним чином. Графіки основних режимів роботи двигунів зображені на фіг.2. 1. Сигнал про перевантаження, коли всі фазні струми перевищують номінальний, видається, якщо: Ідв/Ін К, де Ідв - фактичний струм навантаження, Ін номінальний струм, К - константа із часовострумової характеристики (див. фіг.З), тобто той час, протягом якого виконується співвідношення Ідв/Ін. 2. Сигнал про «заклинювання» видається, якщо: Ідв4Ін за t – t1>0,7tп, 3. Сигнал про втрату однієї з фаз живлячої напруги видається, якщо: (ІА 0, IB 0, IС = 0) V (ІА 0, IВ 0, IС 0) V (ІА = 0, IB 0, IС 0) за t = t – t1 > tзi, де Іі - фазні струми двигуна, V - функція «або», t - показання годинника, t1 - момент приходу сигналу із блок-контакту пускача, 4. Сигнал про наявність асиметрії фазних струмів видається, якщо: /ІА - IB/ V /ІА - IС/ V /IB - 1С/ > К, де Іі - фазні струми двигуна, V - функція «або», К - константа, величина якої визначається при налагодженні пристрою. 5. Сигнал заборони на виконання реверсу в режимі противключення (Uзв) і сигнал на гальмування (Uг) з появою команди «Вперед» на номінальній швидкості пересування «Назад» видається: Uв = 1, Uг = 1, якщо: I 0,7 Ін і при tпв-tзнtзі, де І - виміряне значення струму, Ін номінальне значення струму двигуна, tзн - момент часу зняття команди «Назад», tпв - момент часу появи команди «Вперед», tзi - тут і далі заданий інтервал часу, кількісно не рівний один одному 6. Сигнал заборони на виконання реверса в режимі противключення (Uзв) і сигнал на гальмування (Uг) з появою команди «Вперед» на номінальній швидкості пересування «Назад» знімається: Uв =0, Uг = 0, якщо: I 0,35 Ін і при tпв-tзнtзі, де t - показання годинника. 7. Сигнал заборони на виконання реверсу в режимі противключення (Uзн) і сигнал на гальмування (Uг) з появою команди «Назад» на номінальній швидкості пересування «Вперед» видається: Uзн = 1, Uг = 1, якщо: I 0,7 Ін і при tпв-tзнtзі , 13 де І - виміряне значення струму, Ін номінальне значення струму двигуна, t3B - момент часу зняття команди «Вперед», пга – момент часу появи команди «Назад». 8. Сигнал заборони на виконання реверсу в режимі противключення (Uзн) і сигнал на гальмування (Uг) з появою команди «Назад» на номінальній швидкості пересування «Вперед» знімається: Uзн =0, Uг = 0, якщо: I 0,35 Ін і при tпв-tзнtзі, де t - показання годинника. Часові діаграми, що пояснюють режим захисту від противключення, показані на фіг. 4, де Uв, Uн сигнали завдання напрямку руху відповідно «Вперед» і «Назад», І - струм двигуна, швидкість двигуна, а Інав - струм навантаження, Ідг - струм динамічного гальмування, з - заданна швидкість, Ub(Uh) - сигнал на пересування «Вперед» («Назад»), tp - тривалість реверсу, tг тривалість гальмування. 9. Сигнал відключення при руйнуванні механічної передачі видається: Uз = 1, якщо Ідв Іхх і при (t -1 п) К, де Іхх - максимальне значення струму холостого ходу, t - показання годинника, t п момент часу подачі команди на пересування, К константа. 10. Сигнал про порушення ліній зв'язку контролеру із джерелами сигналів з аналоговим виходом видається: Uлза = 1, якщо Uc Z і при (t -1 п) К, де Z - константа (напруга на вході АЦП, замовлена шумами останнього), t - показання годинника, t п - момент часу подачі команди на пересування, К - константа. 11. Сигнал про порушення ліній зв'язку контролера із джерелами сигналів з дискретним виходом видається: Uлзд = 1, якщо Uв (Uн) = 0 і при І дв К, де Uв (Uн) - команда на пересування «Вперед» («Назад») на входах контролера, І дв струм двигуна, К - константа. 12. Сигнал про перевищення різниці навантажень двигунів моста видається: Uпрн = 1, якщо Ідв1 - Ідв2 0,3 Ін, де 0,3 Ін - абсолютна різниця струмів щодо номінального. 13. Сигнал про перевищення різниці часів появи навантаження на двигунах моста видається: Uпрч = 1, якщо /tl -t2/ К, 57816 14 де t1 - момент часу появи струму першого двигуна M1, t2 - момент часу появи струму другого двигуна М2. 14. Сигнал про тепловий перегрів двигуна за показниками датчиків температури корпусу „ видається: Uдвтд = 1, якщо Uдт К, де Uдт - показання датчика температури, К константа. 15. Сигнал про відключення вихідних ланцюгів пристрою видається: Uвв = 1, якщо Uв (Uн) = 1 і при І дв К, якщо Uз = 1, де Uв (Uн) - команда на пересування «Вперед» («Назад») на входах контролера, І дв струм двигуна, К - константа, Uз - сигнал заборони, який видається пристроєм, при виконанні умов алгоритмів по п.1 - п.14. На фіг. 5 представлений приклад даних, які видаються пристроєм на екран пульта машиніста, на фіг. 6 - приклад даних, які видаються пристроєм на дисплей робочої станції. Всі необхідні пояснення подані на фіг. 5 і фіг. 6. Дослідно-промисловий зразок пристрою був випробуваний протягом місяця на грейферному крані об'єднаного складу цемзавода в м. Кривій Ріг. Результати випробувань позитивні. При проведенні випробувань було встановлено, що: - режим противключення при спробі його реалізації машиністами не виконується, за рахунок використання режиму гальмування цикл виконання операцій, наприклад, пересування моста, у порівнянні з режимом противключенкя, збільшився тільки на 15%, - зв'язок контролера з пультом машиніста стійкий, - видачі на пульт машиніста недостовірної інформації не виявлено, - два рази за час випробувань був перегрітий двигун М1 моста (неякісний ремонт редуктора), - сімнадцять разів встановлено факти короткочасного перевантаження двигунів підйому, - звірення даних про час руху мосту за зміну, виданих на пульт, з даними, отриманими з використанням секундоміра, показало збіжність результатів, з помилкою, що не перевищує 3,7%, звірення даних про споживання електроенергії двигунами моста за зміну, виданих на пульт, з даними, отриманими з використанням злектролічильника, показало збіжність результатів, з помилкою, що не перевищує 2,4%. 15 57816 16 17 57816 18 19 57816 20 21 Комп’ютерна верстка Г. Паяльніков 57816 Підписне 22 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMicroprocessor device for control and protection of bridge crane mechanisms
Автори англійськоюBesarab Serhii Mykhailovych, Vainer Arkadii Yosypovych, Denysyk Dmytro Ihorovych, Korotchenkov Valerii Mykhailovych, Mokhnatyi Oleksii Volodymyrovych, Tkachenko Hryhorii Ivanovych, Khyzhniak Viacheslav Yakovych
Назва патенту російськоюМикропроцессорное устройство защиты и контроля работы механизмов мостовых kpahob
Автори російськоюБесараб Сергей Михайлович, Вайнер Аркадий Иосифович, Денисик Дмитрий Игоревич, Коротченков Валерий Михайлович, Мохнатый Алексей Владимирович, Ткаченко Григорий Иванович, Хижняк Вячеслав Яковлевич
МПК / Мітки
МПК: B66C 23/88, B66C 13/18
Мітки: кранів, пристрій, мікропроцесорний, роботи, мостових, механізмів, захисту, контролю
Код посилання
<a href="https://ua.patents.su/11-57816-mikroprocesornijj-pristrijj-zakhistu-jj-kontrolyu-roboti-mekhanizmiv-mostovikh-kraniv.html" target="_blank" rel="follow" title="База патентів України">Мікропроцесорний пристрій захисту й контролю роботи механізмів мостових кранів</a>
Пристрій для очищення тролей мостових кранів від полою

Номер патенту: 12638
Опубліковано: 15.02.2006
Автори: Салієв Андрій Іванович, Токарев Веніамін Петрович, Махсма Михайло Миколайович, Кукса Євген Володимирович, Токарев Валерій Веніамінович, Бойко Володимир Семенович
МПК: B66C 17/00
Мітки: полою, очищення, пристрій, кранів, тролей, мостових
Формула / Реферат:
Пристрій для очищення тролей мостових кранів від полою, який характеризується тим, що виконаний у вигляді трансформатора, пофазно на вході та виході підключений до відповідних тролей через комутаційну апаратуру, наприклад рубильники.
Спосіб монтажу (демонтажу) мостових кранів
Номер патенту: 70811
Опубліковано: 15.10.2004
Автори: Федотов Олег Васильович, Спицький Валерій Васильович
МПК: B60B 29/00, B66C 23/82
Мітки: спосіб, кранів, монтажу, мостових, демонтажу
Формула / Реферат:
Спосіб монтажу (демонтажу), наприклад мостових кранів на підкранові колії експлуатованої промислової будівлі за допомогою самохідного стрілкового крана, який відрізняється тим, що установку мостового крана здійснюють на додатковій підкрановій колії, співвісно зістикованій з підкрановими коліями промислової будівлі і розташованій на додатковій крановій естакаді за межами прогону будівлі, після чого кран подають усередину промислової будівлі...
Пристрій для контролю параметрів стрілових кранів
Номер патенту: 2473
Опубліковано: 15.04.2004
Автори: Фунд Володимир Германович, Столбиков Станіслав Григорійович, Усанов Володимир Миколайович, Кузвесов Віктор Георгійович, Андрієнко Миколай Миколайович
МПК: B66C 23/90
Мітки: стрілових, контролю, параметрів, пристрій, кранів
Формула / Реферат:
Пристрій для контролю параметрів стрілових кранів, що містить корпус із розташованими в ньому аналого-цифровим перетворювачем, цифровим обчислювальним і цифровим запам'ятовуючим блоками, виконаними у вигляді плати, встановленої паралельно одній із сторін корпуса, причому один із інформаційних входів цифрового обчислювального блока з'єднаний із виходом аналого-цифрового перетворювача, другий, двоспрямований, - із входом і виходом цифрового...
Пристрій для захисту трифазного асинхронного електродвигуна від аварійних режимів роботи
Номер патенту: 48876
Опубліковано: 12.04.2010
Автори: Квітка Олександр Сергійович, Нестерчук Діна Миколаївна, Квітка Сергій Олексійович
МПК: H02H 7/09
Мітки: аварійних, електродвигуна, асинхронного, режимів, пристрій, трифазного, роботи, захисту
Формула / Реферат:
Пристрій для захисту трифазного асинхронного електродвигуна від аварійних режимів роботи, який складається з блока включення-відключення електродвигуна, з блоків світлової, звукової сигналізації та цифрової індикації, з блока живлення, а також з контролюючого півкомплекту, який містить первинний вимірювальний перетворювач температури, блок підсилення, блок порівняння напруги, що надходить з перетворювача температури, стабілізатор напруги...
Пристрій автоматичного захисту групи електродвигунів від анормальних режимів роботи

Номер патенту: 34858
Опубліковано: 26.08.2008
Автори: Нестерчук Діна Миколаївна, Квітка Сергій Олексійович
МПК: H02H 7/09
Мітки: роботи, групи, електродвигунів, автоматичного, режимів, пристрій, захисту, анормальних
Формула / Реферат:
Пристрій автоматичного захисту групи електродвигунів від анормальних режимів роботи, який містить блоки включення-відключення електродвигунів, блоки світлової та звукової сигналізації та цифрової індикації, блок живлення, а також контролюючі півкомплекти, кожен півкомплект містить первинний вимірювальний перетворювач температури, блок підсилення, блок порівняння напруги, що надходить із перетворювача температури, та стабілізатор напруги...
Попередній патент: Пристрій для вимірювання спрацювання силового масляного трансформатора
Наступний патент: Бункер для сипучих матеріалів
Випадковий патент: Використання тонкодисперсної монтморилонітової глини зеленої орджонікідзівського родовища як стимулятора мікроциркуляції крові та пригнічення запальних процесів