Спосіб і пристрій (варіанти) для визначення швидкості передачі даних у системі безпровідного зв’язку з швидкісною передачею пакетів даних
Номер патенту: 74213
Опубліковано: 15.11.2005
Автори: Разумов Леонід, Вей Йонбін, Бао Ґанґ, Ландбі Стайн А.
Формула / Реферат
1. Пристрій безпровідного зв'язку, який включає:
- перший процесор, призначений оперативно приймати перший показник, що відповідає наявній потужності передачі пакетних даних; і
- кореляційний вузол, призначений оперативно визначати показник швидкості передачі пакетних даних як функцію першого показника і сили прийнятого пілот-сигналу.
2. Пристрій за п. 1, який відрізняється тим, що перший показник відповідає відношенню наявної потужності передачі пакетних даних до сили пілот-сигналу.
3. Пристрій за п. 2, який відрізняється тим, що сила пілот-сигналу є мірою відношення сигнал/шум у пілот-сигналі.
4. Пристрій за п. 3, який відрізняється тим, що додатково включає вузол корекції, з'єднаний з першим процесором і кореляційним вузлом і призначений оперативно коригувати відношення сигнал/шум пілот-сигналу у відповідь на визначення відношення сигнал/шум для передачі пакетних даних.
5. Пристрій за п. 4, який відрізняється тим, що показник швидкості передачі пакетних даних є відношенням сигнал/шум для передачі пакетних даних.
6. Пристрій за п. 1, який відрізняється тим, що призначений оперативно передавати показник швидкості передачі пакетних даних у каналі вимоги даних.
7. Пристрій за п. 6, який відрізняється тим, що показником швидкості передачі пакетних даних є швидкість передачі даних.
8. Пристрій за п. 1, який відрізняється тим, що працює у системі безпровідного зв'язку, яка підтримує передачі пакетних даних і передачі даних із низькою затримкою.
9. Спосіб у системі безпровідного зв'язку для оперативної передачі даних і передачі даних з низькою затримкою при загальній наявній потужності передачі, який включає:
- встановлення щонайменше одного каналу зв'язку з низькою затримкою з використанням першої потужності;
- визначення наявної потужності трафіка пакетних даних в залежності від загальної наявної потужності передачі і першої потужності; і
- визначення швидкості передачі пакетних даних, базованої на наявній потужності графіка пакетних даних.
10. Спосіб за п. 9, який відрізняється тим, що щонайменше один зв'язок із низькою затримкою є голосовим зв'язком.
11. Спосіб за п. 9, який відрізняється тим, що першою потужністю є відношення сигнал/шум пілот-сигналу, і операція визначення наявної потужності трафіка пакетних даних додатково включає визначення відношення трафік/пілотний сигнал загальної наявної потужності передачі для першої потужності.
12. Спосіб за п. 11, який відрізняється тим, що операція визначення швидкості передачі пакетних даних додатково включає оцінювання відношення сигнал/шум трафіка пакетних даних коригуванням відношення сигнал/шум пілот-сигналу у відношенні трафік/пілот-сигнал.
13. Пристрій безпровідного зв'язку, який включає:
- перший процесор, призначений оперативно приймати перший показник, що відповідає відношенню наявний трафік/сила пілот-сигналу;
- вимірювальний вузол, призначений оперативно приймати пілот-сигнал і визначати відношення сигнал/шум пілот-сигналу;
- суматор, з'єднаний з вимірювальним вузлом і першим процесором і призначений оперативно коригувати відношення сигнал/шум першим показником для формування відношення сигнал/шум для трафіка; і
- кореляційний вузол, призначений оперативно приймати відношення сигнал/шум трафіка і визначати відповідну швидкість передачі даних.
Текст
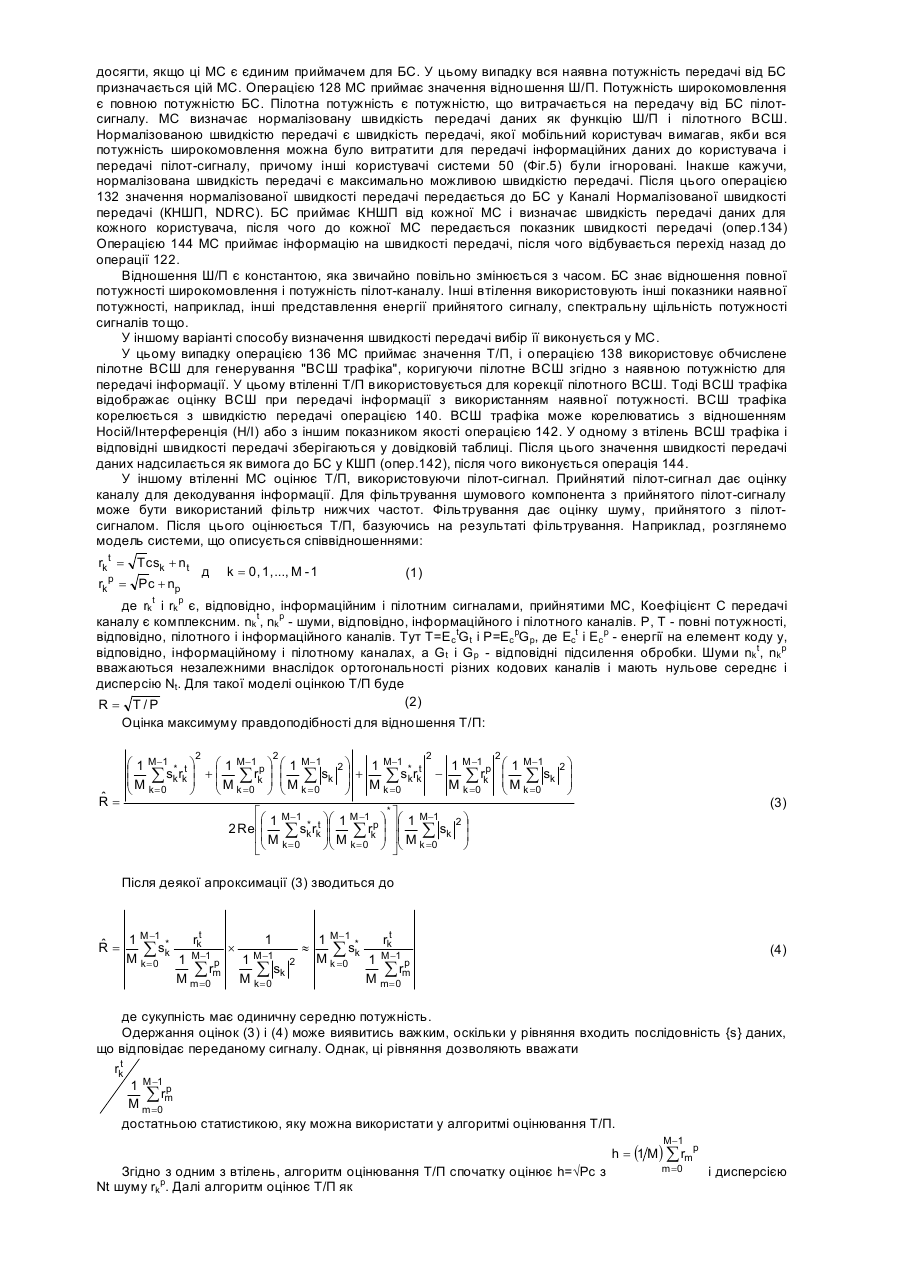
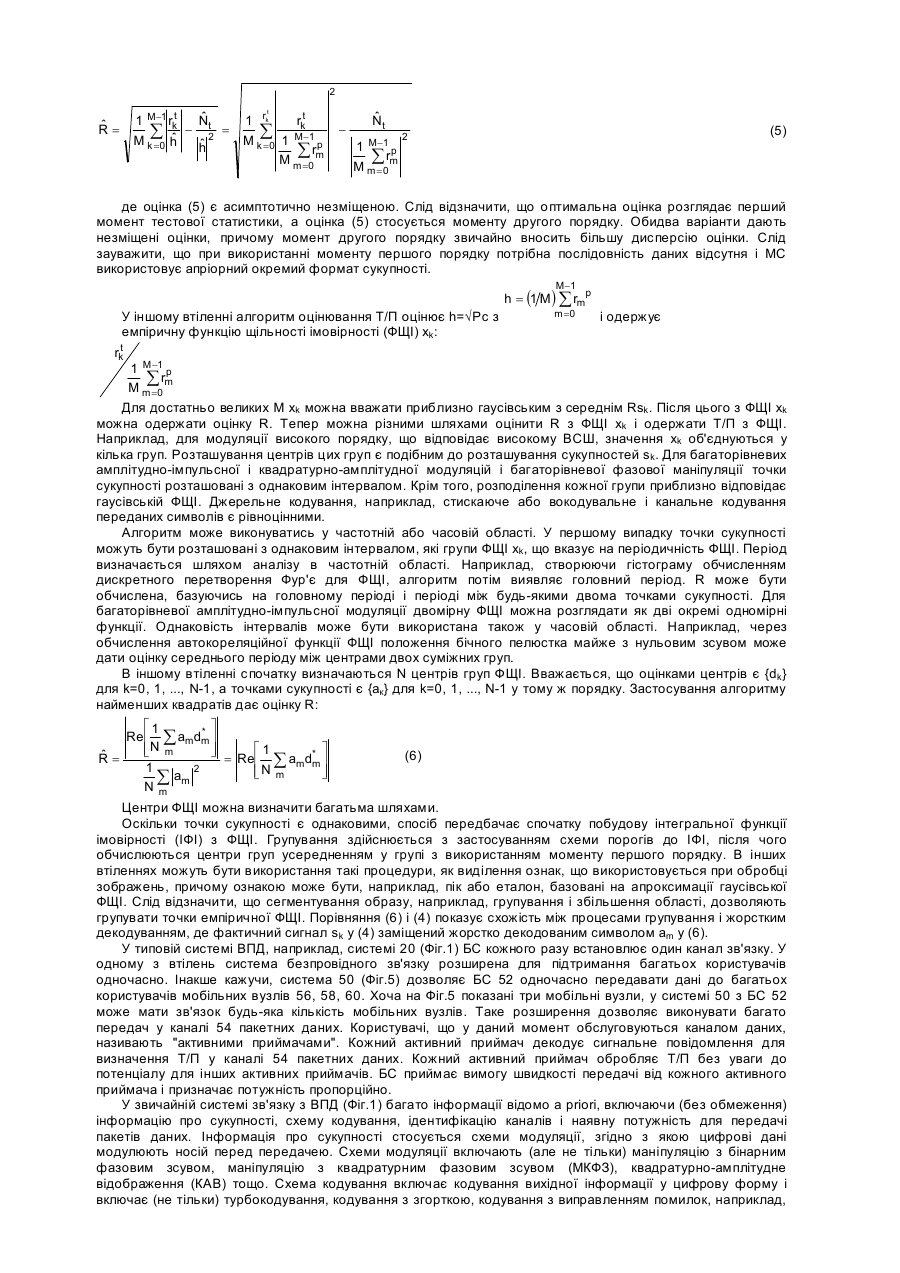
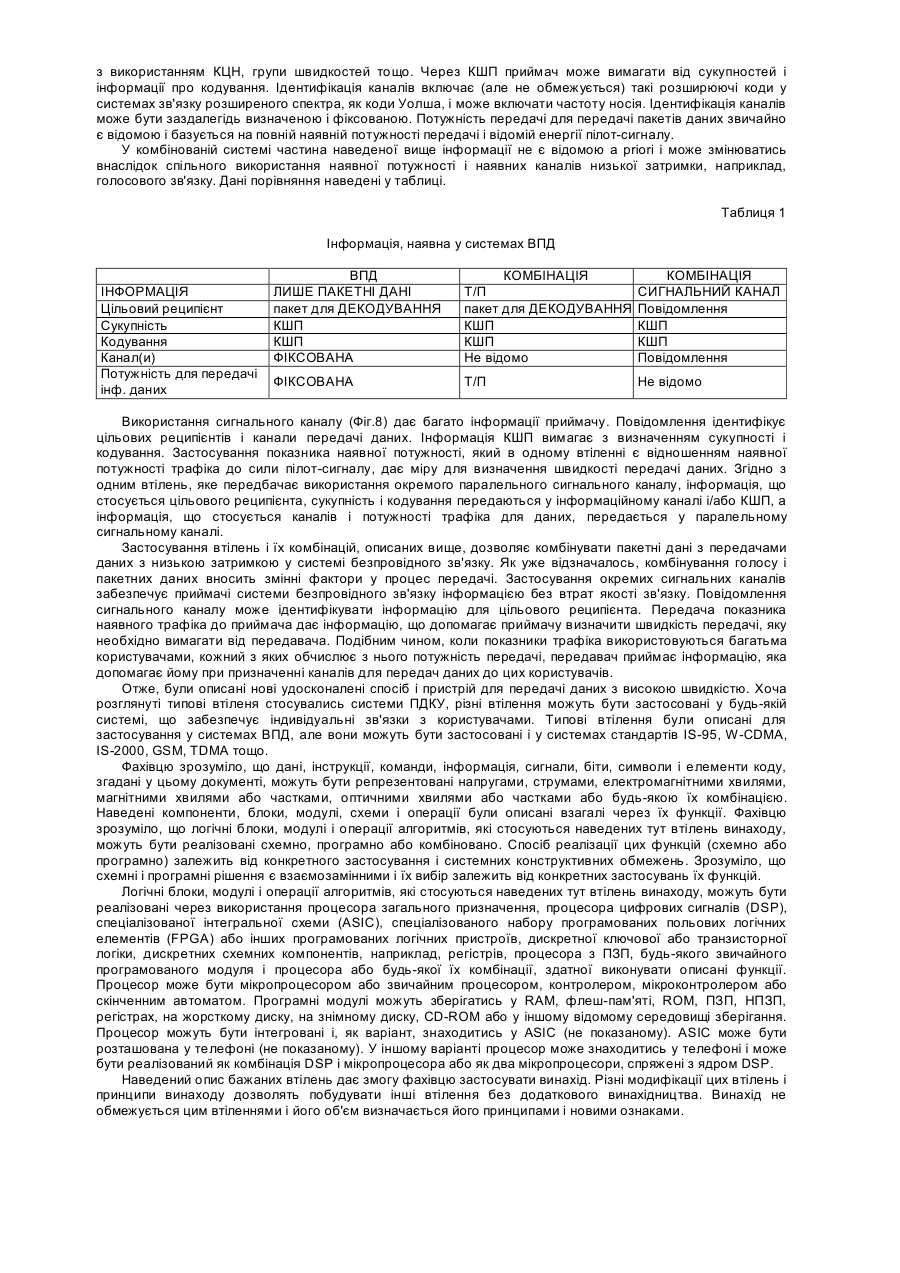
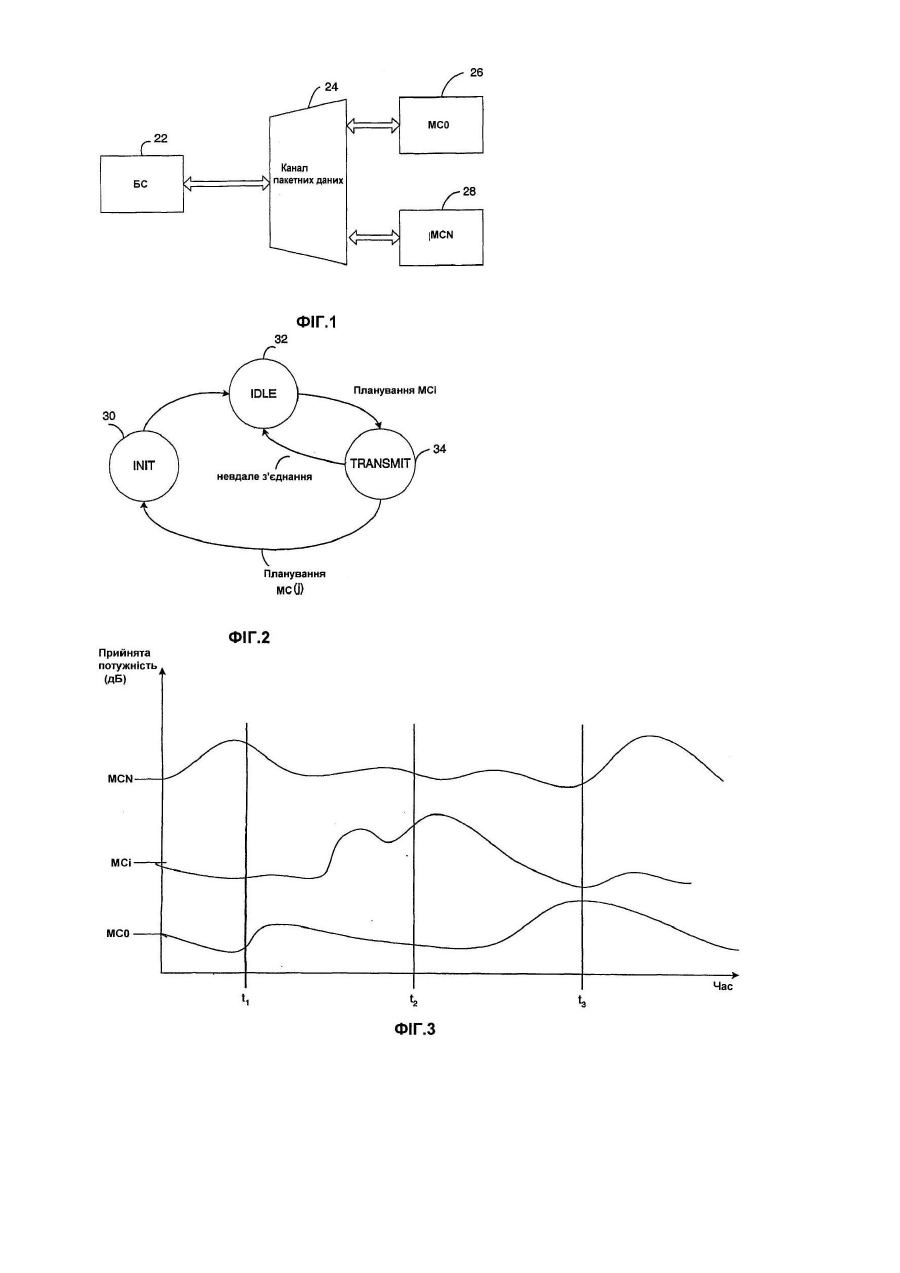
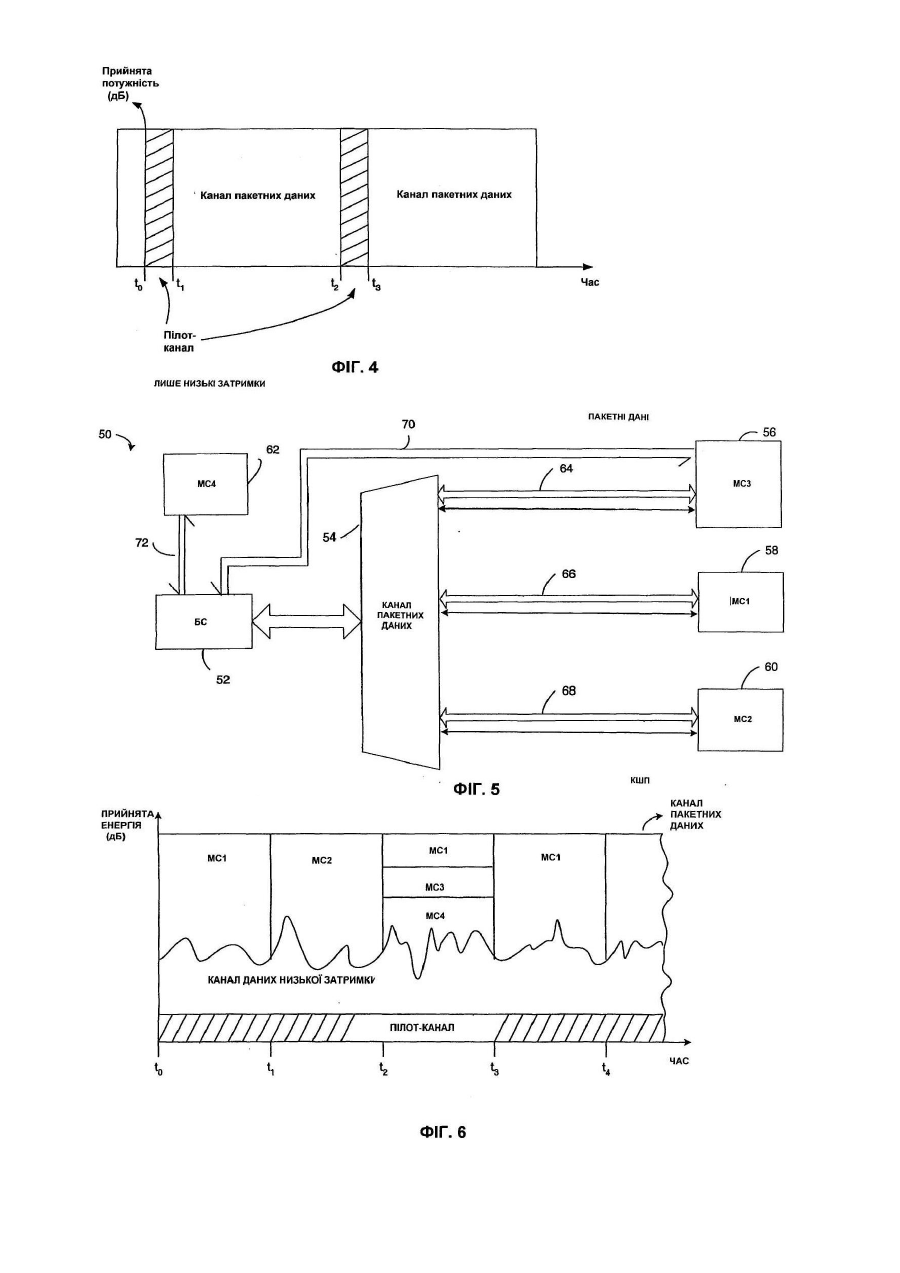
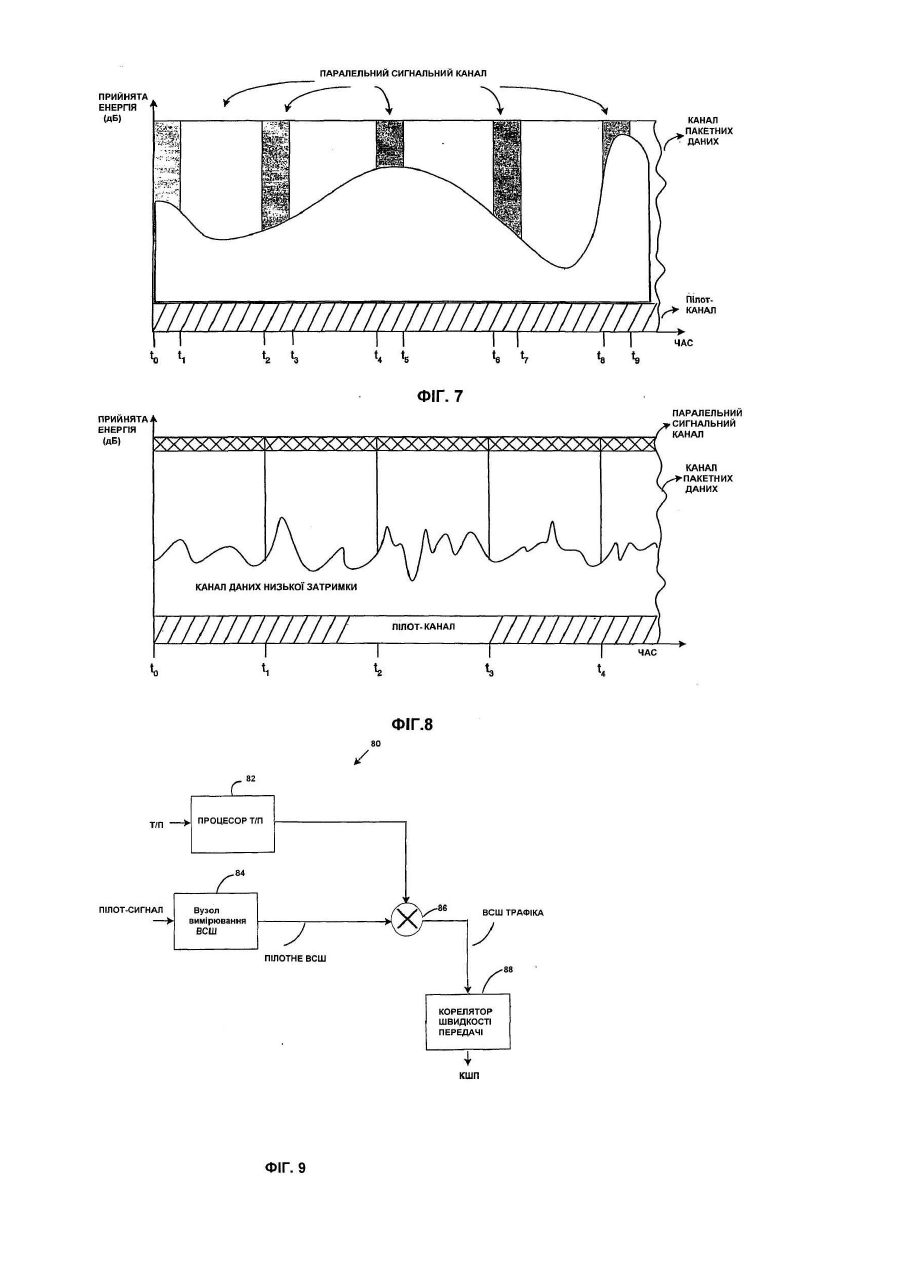
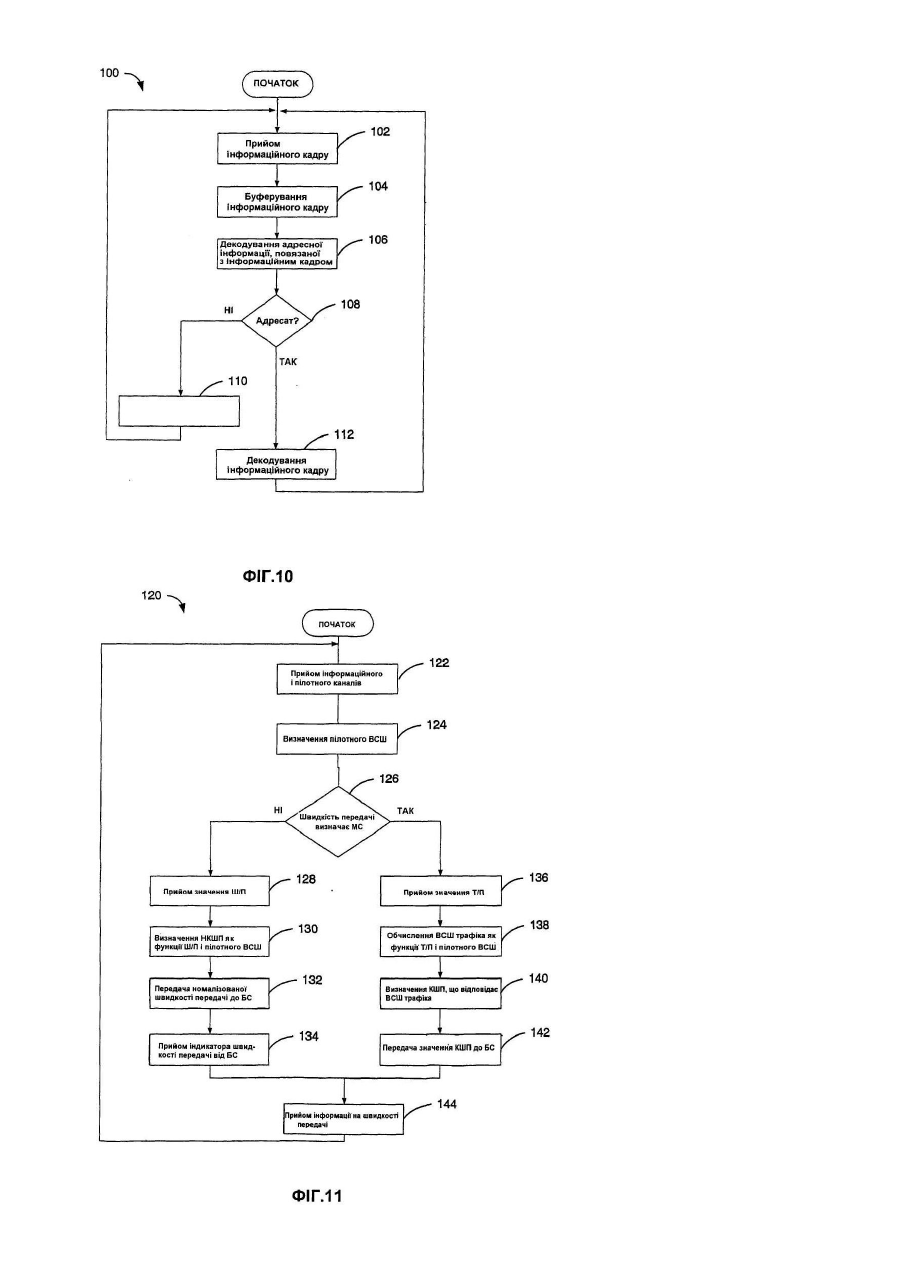
Винахід стосується систем безпровідного зв'язку, зокрема, нових удосконалених способу і пристрою для швидкісної передачі пакетів даних і передачі даних з низькою затримкою у системі безпровідного зв'язку. Зростання попиту на безпровідні передачі і розширення послуг безпровідного зв'язку викликали розвиток спеціальних типів послуг. Однією з таких послуг є Високошвидкісна Передача Даних (ВПД, HDR). Типова система ВПД описана у "TL80-54421-1 HDR Air Interface Specification (Технічні вимоги до ефірного інтерфейсу TL80-54421-1 HDR" (інакше - вимоги НАІ). ВПД забезпечує ефективну передачу пакетів даних у системі безпровідного зв'язку. Труднощі виникають при спробах забезпечити передачу як даних, так і голосу. Голосові системи є системами з низькою затримкою інформації, оскільки працюють в інтерактивному режимі і тому обробка інформації має виконуватись в реальному часі. Інші системи з низькою затримкою включають відео, мультимедіа та інші системи передачі даних у реальному часі. Системи ВПД призначені не для голосового зв'язку, а для оптимізації передачі даних, оскільки у системах ВПД базові станції обслуговують багато мобільних користувачів, але у кожний момент надсилають дані лише до одного. Таке обслуговування вносить затримки у передачі. Такі затримки є прийнятними при передачі даних, оскільки ці дані не використовуються у реальному часі. Однак, такі затримки є неприпустимими для голосового зв'язку. Отже, існує потреба у комбінованій системі, придатній для швидкісної передачі пакетів даних і для передачі голосової інформації з низькими затримками. Потрібно також мати спосіб визначення швидкості передачі даних для пакетованої інформації у таких комбінованих системах. Об'єктом винаходу є новий удосконалений спосіб передачі пакетів з високою швидкістю і передачі даних з низькою затримкою у системі безпровідного зв'язку. У одному з втілень базова станція (БС) системи безпровідного згідно з винаходом спочатку встановлює дані з низькою затримкою і з високим пріоритетом і потім складає план обслуговувань пакетних даних згідно з наявною потужністю після обслуговування даних з низькою затримкою. Система обслуговування пакетів даних у кожний момент часу передає ці пакети до одного користувача. Інші втілення передбачають одночасну передачу пакетів даних до кількох користувачів, розподіляючи наявну потужність між цими користувачами. У визначений час як цільовий реципієнт обирається один користувач, залежно від якості каналу. БС визначає відношення наявної потужності до потужності пілот-каналу і забезпечує це відношення для вибраного користувача. Це відношення називають відношенням "трафік/пілот" і позначають Т/П. Мобільний користувач використовує це відношення для обчислення швидкості передачі даних і надсилає цю інформацію назад до БС. У одному з втілень БС надсилає до мобільного користувача відношення "широкомовлення/пілот" (Ш/П), тобто відношення потужності широкомовлення (повної наявної потужності передачі БС) до потужності пілота, тобто частини потужності широкомовлення, яка витрачається для пілот-каналу. Мобільний користувач визначає нормалізовану швидкість передачі даних, якої має вимагати від БС і яка є функцією Ш/П. Значення нормалізованої швидкості передачі надсилається до БС, після чого приймається рішення стосовно належної швидкості передачі і значення вибраної швидкості передачі надсилається до мобільного користувача. У типовому втіленні для передачі відношення Т/П до мобільного користувача використовується паралельний сигнальний канал, який може бути створений на окремій частоті-носії або у будь-який з способів створення окремого каналу. Згідно з іншим втіленням Т/П надсилається в інформаційному каналі пакетних даних у вигляді заголовка пакету даних або передається безперервно разом з даними пакету. В інших втіленнях може використовуватись інша метрика для оцінювання відношення сигнал/шум (ВСШ) або інформаційного каналу на основі ВСШ пілот-каналу, і ця метрика надсилається до мобільного користувача для визначення швидкості передачі даних. Мобільний користувач вимагає вести передачу з швидкістю, не вищою за визначену. Згідно з одним з об'єктів пристрій безпровідного зв'язку включає перший процесор, призначений оперативно приймати перший показник, що відповідає наявній потужності передачі пакетних даних; і кореляційний вузол, призначений оперативно визначати показник швидкості передачі пакетних даних як функцію першого показника і сили прийнятого пілот-сигналу. Згідно зіншим об'єктом, у системі безпровідного зв'язку, яка призначена оперативно передавати пакетні дані і дані з низькою затримкою і має визначену наявну повну потужність передачі запропоновано спосіб, який включає встановлення щонайменше одного каналу зв'язку з низькою затримкою з використанням першої потужності; визначення наявної потужності для інформаційних пакетів даних як функції наявної повної потужності передачі і першої потужності; і визначення швидкості передачі для пакетних даних, базуючись на наявної потужності для інформаційних пакетів даних. Ще одним об'єктом є пристрій безпровідного зв'язку, який включає перший процесор, призначений оперативно приймати перший показник, що відповідає відношенню "трафік/сила пілот-сигналу"; вимірювальний вузол, призначений оперативно приймати пілот-сигнал і визначати відношення сигнал/шум пілот-сигналу; суматор, призначений оперативно коригувати відношення сигнал/шум першим показником для формування відношення сигнал/шум для трафіка; і кореляційний вузол, призначений оперативно приймати відношення сигнал/шум інформаційного каналу і визначати відповідну швидкість передачі даних. Особливості, об'єкти і переваги винаходу детально розглядаються у наведеному подальшому описі з посиланнями на креслення, у яких: Фіг.1 - блок-схема одного втілення протоколу ВПД системи безпровідного зв'язку, Фіг.2 - схема станів, що описує операції системи ВПД Фіг.1, Фіг.3 - графік користування для користувачів пакетних даних у системі безпровідного зв'язку ВПД Фіг.1, Фіг.4 - графік енергії, прийнятої користувачем у системі безпровідного зв'язку ВПД Фіг.1, Фіг.5 - блок-схема системи безпровідного зв'язку ВПД, яка включає користувачів даних з низькою затримкою згідно з одним з втілень, Фіг.6-8 - графіки енергії, прийнятої користувачами у системі безпровідного зв'язку ВПД згідно з різними втіленнями, Фіг.9 - блок-схема частини приймача у системі безпровідного зв'язку згідно з одним з втілень, Фіг.10 - схема операцій способу обробки інформаційних даних у системі безпровідного зв'язку з використанням сигнального каналу згідно з одним з втілень, і Фіг.11 - схема операцій способу визначення швидкості передачі даних у системі безпровідного зв'язку згідно з одним з втілень. Об'єднання швидкісного обслуговування пакетних даних і обслуговування голосового типу з низькою затримкою є важкою задачею внаслідок різниці між обслуговуванням голосу і обслуговуванням даних. Зокрема, обслуговування голосу має жорсткі заздалегідь визначені вимоги до затримок. Звичайно повна затримка одностороннього проходження мовних кадрів має бути менше 100мс. На відміну від цього затримка даних може бути змінним параметром, що використовується для оптимізації роботи системи передачі даних. Оскільки стан каналу зв'язку даного користувача може змінюватись з часом, це дає змогу вибирати кращі часи для передачі пакетів залежно від стану каналу. Обслуговування даних і обслуговування голосу відрізняє також вимога до голосового обслуговування обслуговувати всіх користувачів з фіксованим і однаковим рівнем якості (РЯ). Наприклад, у цифровій системі РЯ вимагає фіксованої і однакової для всіх швидкості передачі даних з затримкою, не вищою за максимально припустиму для певної частоти кадрових помилок (ЧКП) у мовних кадрах. На відміну від цього при обслуговування даних РЯ не є фіксованим, а може бути різним для різних користувачів, будучи параметром, який оптимізують для підвищення загальної ефективності системи передачі даних. У цьому випадку РЯ звичайно визначають як повну затримку передачі зумовленої кількості даних, у даному випадку пакету даних. Відміною голосового обслуговування є також те, що воно вимагає надійного каналу зв'язку, яка у типовій системі з паралельним доступом і кодовим ущільненням каналів (ПДКУ) забезпечується м'якою передачею зв'язку, результатом якої є надлишкові передачі від двох або більше БС для підвищення надійності. При передачі даних, однак, така додаткова надійність непотрібна, оскільки пакети даних, прийняті з помилками, можуть бути передані повторно. При обслуговування даних потужність передачі, що витрачається на м'яку передачу зв'язку, може бути більш ефективно використана для передачі додаткових даних. На відміну від голосового і інших типів зв'язку з низькими затримками при швидкісній передачі даних використовується перемикання пакетів, а не схем. Дані групуються у невеликі послідовності, до якої у заголовку або хвості додається контрольна інформація. Дані і контрольна інформація разом утворюють пакет. При передачі пакетів у системі виникають різні затримки і навіть втрати одного або кількох пакетів і/або однієї або кількох частин пакету. ВПД і інші системи пакетних даних звичайно є нечутливими до затримки або втрати пакетів. Цю нечутливість можна використати, плануючи передачі для створення оптимальних умов у каналі. У одному з втілень передачі до багатьох користувачів плануються згідно з якостями каналів передачі. У кожний момент часу для передачі до одного з багатьох користувачів витрачається всі наявна потужність. Це створює змінну затримку, оскільки користувачі можуть не мати апріорної інформації про розклад передач, швидкість передачі даних і/або конфігураційні дані, включаючи тип модуляції, кодування каналу тощо. У одному з втілень замість оцінювання такої інформації приймачем він вимагає швидкості передачі і відповідної конфігурації. Розклад передач визначається алгоритмом планування і надсилається у синхронізаційному повідомленні. До надсилання вимоги швидкості передачі приймач визначає оптимальну швидкість передачі, яка може базуватись на наявній потужності передачі. Швидкість передачі є пропорційною до потужності передачі і якості каналу. Комбінована система є системою, здатною здійснювати як передачі даних з низькою затримкою, так і передачу пакетів даних. У таких системах наявна потужність передачі і, отже, наявна швидкість передачі, можуть змінюватись залежно від голосової активності. Приймач не має інформації про голосову активність у системі при визначенні швидкості передачі. Прикладом комбінованої системи є система з Широкосмуговим Паралельним Доступом і з Кодовим Ущільненням каналів згідно з стандартом "ANSI J-STD-01 Draft Standard for W-CDMA interface Compatibility Standard for 1,85-1,99GHz PCS Applicants" (W-CDMA). Іншими такими системами є системи стандарту "TIA/EIA/IS-2000 Standard for cdma2000 Spread Spectrum Systems" (стандарт cdma2000) або інші системи з індивідуальним зв'язком з користувачами. Система 20 (Фіг.1) працює згідно з протоколами, визначеними вимогами НАІ. У цій системі БС 22 має зв'язок з мобільними станціями (МС) 26-28. Ідентифікатором кожної з цих МС є індексне значення від 0 до N, де N - повна кількість МС у системі 20. Канал 24 пакетних даних показаний як мультиплексор, щоб підкреслити перемикання. БС може бути названа "терміналом доступу", що забезпечує зв'язки для користувачів, зокрема, для одного у кожний момент часу. Звичайно термінал доступу з'єднаний з комп'ютерним пристроєм, наприклад, портативним комп'ютером або персональною допоміжною цифровою приставкою. Термінал доступу може бути навіть стільниковим телефоном з доступом до Інтернету. Подібним чином канал 24 пакетних даних може бути названий "мережею доступу" для обміну даними між комутаторною мережею пакетів даних і терміналом доступу. У одному з прикладів БС 22 зв'язує МС 26-28 з Інтернетом. У типовій системі ВПД пакетні дані передаються у одному каналі до вибраного реципієнта, причому канал 24 пакетних даних планує обслуговування МС 26-26 по одній. Прямим називають канал передачі даних від БС, а канал передачі від МС 26-28 називають зворотним. Система 20 пакетних даних планує обслуговування МС 26-26 по одній у кожний момент. Це відрізняється від систем передачі даних з низькими затримкам, у яких кілька каналів обслуговуються одночасно. Використання єдиного каналу дозволяє мати вищу швидкість передачі у вибраному каналі і оптимізує передачі оптимізацією умов у каналі щонайменше для одного каналу зв'язку. У ідеальному випадку БС використовує канал лише тоді, коли він знаходиться в оптимальному стані. Користувачі МС 26-28, що очікують обслуговування даних встановлюють швидкість передачі прямого інформаційного каналу, надсилаючи її через канал Контролю Швидкості Передачі (КШП, DRC) до БС 22. Користувачі плануються згідно з якістю прийнятого сигналу, а також з урахуванням критерію справедливості. Наприклад, цей критерій запобігає наданню системою привілеїв користувачам, що знаходяться поблизу БС, порівняно з іншими. Відношення "носій-інтерференція" виміряється і використовується для визначення швидкості передачі даних. Фіг.2 містить схему станів, що відповідають роботі системи 20 (Фіг.1), тобто системи ВПД, що відповідає вимогам НАІ. Ця схема описує операції з одним мобільним користувачем МСі. У стані 30 (INIT) БС 22 запитує доступ до каналу 24 пакетних даних. Протягом цього стану ініціалізація включає запит прямого пілот-каналу і контролю синхронізації. Після ініціалізації процедура переходить до стану 32 (IDLE). У цьому стані зв'язок з користувачем закритий і канал 24 пакетних даних чекає подальшої команди на відкриття зв'язку. Якщо МСі запланована, процедура переходить до стану 34 (TRANSMIT), у якому виконується передача до МСі, причому МСі використовує зворотний інформаційний канал, а БС - прямий інформаційний канал. Якщо передача або зв'язок були невдалими, передача припиняється і відбувається перехід назад до стану 32 (IDLE). Передача може бути припинена, якщо у МС 26-28 був запланований інший користувач. Якщо поза МС 26-28 був запланований новий користувач, наприклад, МСі, процедура повертається до стану 30 (INIT) для встановлення зв'язку. Таким чином, система 20 може планувати користувачів 26-28 і також користувачів, приєднаних через іншу мережу доступу. Планування користувачів дозволяє системі 20 оптимізувати обслуговування МС 26-28, застосовуючи багатокористувацьку диверсифікацію. Приклад такого планування для трьох МС МС0, МСі і MCN у МС 2628 наведений на Фіг.3. Прийнята енергія (у дБ) наведена у функції часу. У момент t1 MCN приймає сильний сигнал, а МС0 і МСі не такий сильний. У момент t2 МСі приймає найсильніший сигнал, і у момент t3 найсильніший сигнал приймає МС0. Отже, система 20 здатна планувати зв'язки з MCN приблизно у момент t1, з МСі - приблизно у момент t2 і з МС0 - приблизно у момент t3. БС виконує планування, базуючись щонайменше частково на КШП, прийнятий від кожної МС 26-28. Фіг.4 ілюструє типову ВПД у системі 20. Передачі пілот-каналу переміжені з каналом пакетних даних. Наприклад, пілот-канал використовує всю наявну потужність в інтервалах часу t0-t1 і t2-t3. Канал пакетних даних використовує всю наявну потужність у інтервалі t1 -t2 і, починаючи з t3 , і далі. Кожна МС 26-28 обчислює швидкість передачі, базуючись на повній наявній потужності, яку використовує пілот-канал. Швидкість передачі пропорційна наявній потужності. Коли система 20 передає до МС 26-28 лише пакетні дані, пілот-канал точно відображає обчислення наявної потужності. Однак, якщо у одній системі обслуговуються голосові дані і інші дані з низькою затримкою, обчислення ускладнюється. Фіг.5 ілюструє систему 50 безпровідного зв'язку згідно з одним з втілень. БС 50 має зв'язок з багатьма мобільними користувачами, які можуть користуватись різними типами обслуговування, включаючи (і не тільки) обслуговування даних з низькою затримкою і пакетних даних і/або обслуговування лише пакетних даних. Система використовує сумісний з cdma2000 протокол для передачі пакетованих даних, який працює одночасно з обслуговуванням даних з низькою затримкою. У кожний момент часу МС 58 і 60 (МС1 і МС2) користуються обслуговуванням лише пакетних даних, МС 56 (МС3) користується обслуговуванням пакетних даних і даних з низькою затримкою, і МС 62 (МС4) має лише голосове обслуговування. БС 52 має зв'язок з МС 4 62 у прямому і зворотному каналах 72 і з МС3 56 - у прямому і зворотному каналах 70. Для зв'язку ВПД БС 52 планує користувачів для передачі даних у каналі 54 пакетних даних. Зв'язок ВПД з МС3 56 здійснюється через канал 64, з МС1 58 - через канал 66 і з МС2 60 - через канал 68. Кожний з користувачів обслуговування пакетних даних надсилає дані стосовно швидкості передачі до БС 52 у відповідному КШП. В одному з втілень система 50 протягом певного періоду часу планує передачі для одного каналу пакетних даних. У інших втіленнях кілька каналів можуть плануватись одночасно, причому кожний з цих каналів використовує лише частину наявної потужності. Фіг.6 графічно ілюструє операції системи 50. Пілот-канал передається безперервно, як у типових системах з низькою затримкою. Потужність, яку використовують канали таких даних, постійно змінюється з часом, а ініціювання передач, їх обробка і припинення здійснюються згідно з особливостями зв'язку. Канал пакетних даних використовує наявну потужність після забезпечення потреб пілот-каналу і обслуговування з низькою затримкою. Канал пакетних даних називають також Спільним Допоміжним Каналом (СДК, PSCH) і він включає ресурси системи, що залишаються після призначення спеціального і спільного каналів. Динамічне призначення ресурсів включає об'єднання всієї невикористаної потужності і розширюючих спектр кодів, наприклад, кодів Уолша, для формування СДК. Максимальну потужність широкомовлення для СДК позначено I ormax. Згідно з одним з втілень, формат каналу PSCH визначає паралельні субканали, кожний з яких має унікальний код, що розширює спектр. Далі кодується, переміжується і модулюється один кадр даних. Одержаний сигнал демультиплексується по субканалах. У приймачі сигнали об'єднуються для відновлення кадру. Схема кодування кадрів змінної довжини генерує довші кадри з нижчою швидкістю передачі у щілині. Кожний кодований пакет розділяється на субпакети, кожний з яких передається в одній або кількох щілинах, що створює інкрементну надлишковість. На відміну від Фіг.4 додання даних з низькою затримкою до передач ВПД дає можливість для вимірювання наявної потужності. Зокрема, у системі передачі лише пакетних даних (Фіг.4) всі розширюючі спектр коди, наприклад, коди Уолша, можуть бути використані для вибраного каналу передачі. Коли до обслуговування пакетних даних додаються голосові дані або дані з низькою затримкою, кількість наявних кодів змінюється з часом. З зміною кількості обслуговувань голосових даних або даних з низькою затримкою змінюється наявна кількість кодів для передачі даних. МС1 (Фіг.6) запланована на період t0-t1, a MC2 - на період t1-t2. Протягом періоду t2-t3 приєднуються кілька каналів пакетованих даних, включаючи МС1, МС3 і МС4. На період t3-t4 запланована лише МС1. Протягом періоду t0-t4 потужність, яку споживає канал даних низької затримки, безперервно змінюється, впливаючи на наявну потужність для передачі пакетованих даних. Оскільки кожна МС перед прийомом передач обчислює швидкість передачі, може виникнути проблема під час передачі, якщо наявна потужність знизиться без відповідної зміни швидкості передачі. Для забезпечення МС 56-60 поточною інформацією про наявну потужність БС 52 визначає відношення наявної потужності до потужності пілот-каналу (відношення Т/П). БС 52 надсилає це відношення до запланованих МС 56-60, які використовують це відношення разом з ВСШ пілот-каналу для визначення швидкості передачі. У одному з втілень пілотне ВСШ коригується, базуючись на Т/П, для одержання "ВСШ трафіка", корельованого з швидкістю передачі. Після цього МС 5660 передає значення швидкості передачі до БС 52 у вигляді вимоги КШП. У одному з втілень відношення Т/П включається у заголовок пакету даних або може, бути вкраплене або введене у канал ВПД пакетованих інформаційних даних. Значення відношення Т/П (Фіг.7 передається перед трафіком і дає МС 56-60 оновлену інформацію про наявну потужність, після змін у каналі низької затримки. Такі зміни впливають також впливають на кількість кодів, наприклад, кодів Уолша, призначених розширювати інформаційні сигнали. Зменшення наявної потужності і кількості кодів призводить до зниження швидкості передачі. Наприклад, у одному з втілень, якщо у наявності є кілька каналів пакетованих даних, пакетовані дані до одного або всіх користувачів передаються у каналах, що відповідають кодам Уолша 16-19 системи ПДКУ. У типовому втіленні (Фіг.8) для передачі значення Т/П до мобільного користувача використовується паралельний сигнальний канал. Цей канал є каналом низької швидкості, утворений окремим кодом Уолша, і несе інформацію про цільового реципієнта, канали, що використовуються для передачі інформації і тип кодування. Паралельний сигнальний канал може бути реалізований з використанням окремої частоти-носія або у інший з багатьох способів створення такого каналу. Пакетовані до певного користувача передаються у одному або кількох заздалегідь вибраних каналах. Наприклад, у одному з втілень системи ПДКУ коди Уолша 16-19 призначаються каналам даних. Сигнальне повідомлення може бути передане одночасно з пакетом даних. Це повідомлення вказує цільового реципієнта і канали передачі пакету даних і тип кодування. Сигнальне повідомлення може використовувати окремий код Уолша або може бути мультиплексоване за часом у швидкісні дані вкраплюванням або введенням. У одному з втілень сигнальне повідомлення кодується у кадр, коротший за кадр пакету даних, наприклад у заголовок, що дозволяє приймачу декодувати це повідомлення і приймати рішення щодо обробки. Дані, потенційно призначені для приймача, буферуються в очікуванні прийняття такого рішення. Наприклад, якщо приймач не є цільовим реципієнтом даних, приймач може відкинути буферовані дані або припинити попередню обробку даних, наприклад, буферування тощо. Якщо сигнальний канал не має даних для приймача, приймач ігнорує буфер, у іншому разі він декодує буферовані дані, використовуючи параметри, вказані у сигнальному повідомленні. У одному з втілень паралельний сигнальний канал передається до багатьох користувачів. Оскільки ці користувачі можуть розрізняти дані, призначені для різних користувачів, кожний з них може також приймати спільні пакети даних. Таким чином сигнальним повідомлення передається конфігураційна інформація, і кожний користувач може прийняти і декодувати пакети. У одному з втілень повідомлення передається широкомовно до багатьох користувачів разом ідентифікатором групи. Мобільні користувачі, що належать до групи, знають цей ідентифікатор заздалегідь. Ідентифікатор групи може бути розміщений у заголовку і може бути унікальним кодом Уолша або іншим ідентифікатором. У одному з втілень мобільні користувачі можуть належати до кількох груп. Фіг.9 ілюструє частину МС 80, адаптовану для обслуговування пакетованих даних у системі 50. Значення Т/П надходить до процесора Т/П 82. Пілот-сигнал надходить до вузла 84 вимірювання ВСШ, який обчислює ВСШ прийнятого пілот-сигналу. Вихідне Т/П і пілотне ВСШ надходять до перемножувача 86 для визначення ВСШ інформаційного каналу, яке надсилається до корелятора 88 швидкості передачі. Корелятор 88 генерує швидкість передачі для передачі через КШП. Описані функції частини МС 80 можуть бути виконані схемно, програмно або комбіновано. Значення Т/П може бути передане у паралельному сигнальному каналі (Фіг.8). Оскільки приймач визначає швидкість передачі, базуючись на Т/П, сигнальне повідомлення може не включати швидкість передачі. Далі приймач визначає час надходження даних, базуючись на переданому синхронізаційному повідомленні. У одному з втілень для передачі часової інформації генерується окреме сигнальне повідомлення, яке передається паралельно з даними. У іншому втіленні сигнальні повідомлення вкраплюються у дані. Фіг.10 ілюструє спосіб 100 обробки даних у комбінованій системі безпровідного зв'язку, здатної обслуговувати пакетні дані і дані з низькою затримкою, згідно з одним з втілень. МС приймає інформаційний кадр, прийнятий в інформаційному каналі (опер.102). Цей кадр буферується (опер.104). Буферування дозволяє МС обробити цю інформацію пізніше, без втрати переданих даних. Наприклад, прийняті дані можуть бути буферовані під час інших операцій обробки. У даному втіленні буферування відкладає обробку даних, доки МС не визначить цільового реципієнта даних. Дані, адресовані до інших МС не обробляються, що зберігає цінні ресурси. Коли МС визначає, що є вона цільовим реципієнтом буферовані дані зчитується і обробляються. Буферовані дані є прийнятими зразками радіочастоти. Інші втілення можуть визначати швидкість передачі без буферування інформації і обробляти прийняті дані без зберігання їх у буфері. МС 10 декодує прийняту інформацію, пов'язану з інформаційним кадром (опер.104). Операцією 108 виконується визначення, чи є даний мобільний користувач цільовим реципієнтом. Якщо ні, виконується операція 110, якою буферований інформаційний кадр відкидається і відбувається перехід назад до операції 102 для наступного кадру. Якщо цей користувач є цільовим реципієнтом, операцією 112 виконується декодування кадру і відбувається перехід назад до операції 102. Здатність декодувати невелику частину передачі і уникати зайвого декодування і обробки підвищує ефективність роботи МС і знижує споживання потужності. Фіг.11 ілюструє способи визначення швидкості передачі у комбінованій системі безпровідного зв'язку згідно з одним з втілень. МС приймає сигнали інформаційного і пілотного каналів (опер.122) і визначає пілотне ВСШ, базуючись на прийнятому пілот-сигналі (опер.124). У цьому втіленні пілот-сигнал передається у окремому призначеному для цього каналі. У інших втіленнях пілот-сигнал може бути вкраплений в одну або більше передач в одному або кількох каналах. У одному з втілень пілот-сигнал передається на зумовленій частоті, відмінній від частоти інформаційного каналу. Для передачі пакетів даних БС і кожна МС визначають частоту передачі даних. У одному з втілень БС визначає швидкість передачі і інформує про неї МС, у іншому - МС визначає швидкість передачі і інформує про це БС. У ще одному втіленні БС і МС узгоджують між собою швидкість передачі і потім повідомляють одна одну. Операція 126 розділяє потік операцій згідно з місцем визначення швидкості передачі. Якщо швидкість передачі вибирає МС, виконується операція 136, якщо ні - операція 128. У одному з втілень визначення швидкості передачі передбачає узгодження між ИС і БС, у процесі якого МС визначає максимальну можливу швидкість передачі, що репрезентує швидкість передачі, якої можна досягти, якщо ці МС є єдиним приймачем для БС. У цьому випадку вся наявна потужність передачі від БС призначається цій МС. Операцією 128 МС приймає значення відношення Ш/П. Потужність широкомовлення є повною потужністю БС. Пілотна потужність є потужністю, що витрачається на передачу від БС пілотсигналу. МС визначає нормалізовану швидкість передачі даних як функцію Ш/П і пілотного ВСШ. Нормалізованою швидкістю передачі є швидкість передачі, якої мобільний користувач вимагав, якби вся потужність широкомовлення можна було витратити для передачі інформаційних даних до користувача і передачі пілот-сигналу, причому інші користувачі системи 50 (Фіг.5) були ігноровані. Інакше кажучи, нормалізована швидкість передачі є максимально можливою швидкістю передачі. Після цього операцією 132 значення нормалізованої швидкості передачі передається до БС у Каналі Нормалізованої швидкості передачі (КНШП, NDRC). БС приймає КНШП від кожної МС і визначає швидкість передачі даних для кожного користувача, після чого до кожної МС передається показник швидкості передачі (опер.134) Операцією 144 МС приймає інформацію на швидкості передачі, після чого відбувається перехід назад до операції 122. Відношення Ш/П є константою, яка звичайно повільно змінюється з часом. БС знає відношення повної потужності широкомовлення і потужність пілот-каналу. Інші втілення використовують інші показники наявної потужності, наприклад, інші представлення енергії прийнятого сигналу, спектральну щільність потужності сигналів тощо. У іншому варіанті способу визначення швидкості передачі вибір її виконується у МС. У цьому випадку операцією 136 МС приймає значення Т/П, і операцією 138 використовує обчислене пілотне ВСШ для генерування "ВСШ трафіка", коригуючи пілотне ВСШ згідно з наявною потужністю для передачі інформації. У цьому втіленні Т/П використовується для корекції пілотного ВСШ. Тоді ВСШ трафіка відображає оцінку ВСШ при передачі інформації з використанням наявної потужності. ВСШ трафіка корелюється з швидкістю передачі операцією 140. ВСШ трафіка може корелюватись з відношенням Носій/Інтерференція (Н/І) або з іншим показником якості операцією 142. У одному з втілень ВСШ трафіка і відповідні швидкості передачі зберігаються у довідковій таблиці. Після цього значення швидкості передачі даних надсилається як вимога до БС у КШП (опер.142), після чого виконується операція 144. У іншому втіленні МС оцінює Т/П, використовуючи пілот-сигнал. Прийнятий пілот-сигнал дає оцінку каналу для декодування інформації. Для фільтрування шумового компонента з прийнятого пілот-сигналу може бути використаний фільтр нижчих частот. Фільтрування дає оцінку шуму, прийнятого з пілотсигналом. Після цього оцінюється Т/П, базуючись на результаті фільтрування. Наприклад, розглянемо модель системи, що описується співвідношеннями: rk t = Tcsk + nt д rk p = Pc + np k = 0, 1, ..., M - 1 (1) де rkt і rkp є, відповідно, інформаційним і пілотним сигналами, прийнятими МС, Коефіцієнт С передачі каналу є комплексним. nkt, nkp - шуми, відповідно, інформаційного і пілотного каналів. Ρ, Τ - повні потужності, відповідно, пілотного і інформаційного каналів. Тут Τ=EctGt і Ρ=EcpGp, де Есt і Еср - енергії на елемент коду у, відповідно, інформаційному і пілотному каналах, a Gt і Gp - відповідні підсилення обробки. Шуми nkt, nkp вважаються незалежними внаслідок ортогональності різних кодових каналів і мають нульове середнє і дисперсію Nt. Для такої моделі оцінкою Т/П буде (2) R = T/P Оцінка максимуму правдоподібності для відношення Т/П: 2 ˆ R= 2 æ 1 M-1 * t ö æ 1 M-1 p ö ç å sk rk ÷ + ç å rk ÷ çM ÷ çM ÷ è k= 0 ø è k =0 ø æ 1 M-1 ç å sk çM è k=0 2ö 2 M-1 M -1 t p ÷ + 1 å s * rk - 1 å rk k ÷ M M k =0 k =0 ø * éæ M-1 M -1 ö ùæ 1 M-1 1 * t öæ 1 p 2 Reêç å sk rk ÷ç å rk ÷ úç å sk ÷ç M ÷ ç êç M k = 0 øè k = 0 ø úè M k =0 ëè û 2 æ 1 M-1 ç å sk çM è k =0 2ö ÷ ÷ ø (3) 2ö ÷ ÷ ø Після деякої апроксимації (3) зводиться до t 1 M -1 * rk 1 ˆ R= å sk M-1 ´ M -1 M k =0 1 1 p å rm M å sk M m =0 k =0 2 » 1 M-1 * rt å sk Mk-1 M k =0 1 p å rm M m=0 (4) де сукупність має одиничну середню потужність. Одержання оцінок (3) і (4) може виявитись важким, оскільки у рівняння входить послідовність {s} даних, що відповідає переданому сигналу. Однак, ці рівняння дозволяють вважати t rk 1 M -1 p å rm M m =0 достатньою статистикою, яку можна використати у алгоритмі оцінювання Т/П. M-1 Згідно з одним з втілень, алгоритм оцінювання Т/П спочатку оцінює h=ÖPc з Nt шуму rkр. Далі алгоритм оцінює Т/П як h = (1 M) å rmp m =0 і дисперсією 2 t ˆ 1 r rt N 1 M-1 rk å ˆ - t2 = M å 1 Mk-1 M k =0 h ˆ k =0 h å rp M m =0 m t k ˆ R= ˆ Nt 1 M-1 p å rm M m=0 (5) 2 де оцінка (5) є асимптотично незміщеною. Слід відзначити, що оптимальна оцінка розглядає перший момент тестової статистики, а оцінка (5) стосується моменту другого порядку. Обидва варіанти дають незміщені оцінки, причому момент другого порядку звичайно вносить більшу дисперсію оцінки. Слід зауважити, що при використанні моменту першого порядку потрібна послідовність даних відсутня і МС використовує апріорний окремий формат сукупності. M-1 У іншому втіленні алгоритм оцінювання Т/П оцінює h=ÖPc з емпіричну функцію щільності імовірності (ФЩІ) xk: h = (1 M) å rmp m =0 і одержує t rk 1 M -1 p å rm M m =0 Для достатньо великих Μ xk можна вважати приблизно гаусівським з середнім Rsk. Після цього з ФЩІ хk можна одержати оцінку R. Тепер можна різними шляхами оцінити R з ФЩІ хk і одержати Т/П з ФЩІ. Наприклад, для модуляції високого порядку, що відповідає високому ВСШ, значення хk об'єднуються у кілька груп. Розташування центрів цих груп є подібним до розташування сукупностей sk. Для багаторівневих амплітудно-імпульсної і квадратурно-амплітудної модуляцій і багаторівневої фазової маніпуляції точки сукупності розташовані з однаковим інтервалом. Крім того, розподілення кожної групи приблизно відповідає гаусівській ФЩІ. Джерельне кодування, наприклад, стискаюче або вокодувальне і канальне кодування переданих символів є рівноцінними. Алгоритм може виконуватись у частотній або часовій області. У першому випадку точки сукупності можуть бути розташовані з однаковим інтервалом, які групи ФЩІ xk, що вказує на періодичність ФЩІ. Період визначається шляхом аналізу в частотній області. Наприклад, створюючи гістограму обчисленням дискретного перетворення Фур'є для ФЩІ, алгоритм потім виявляє головний період. R може бути обчислена, базуючись на головному періоді і періоді між будь-якими двома точками сукупності. Для багаторівневої амплітудно-імпульсної модуляції двомірну ФЩІ можна розглядати як дві окремі одномірні функції. Однаковість інтервалів може бути використана також у часовій області. Наприклад, через обчислення автокореляційної функції ФЩІ положення бічного пелюстка майже з нульовим зсувом може дати оцінку середнього періоду між центрами двох суміжних груп. В іншому втіленні спочатку визначаються N центрів груп ФЩІ. Вважається, що оцінками центрів є {dk} для k=0, 1, ..., N-1, а точками сукупності є {ак} для k=0, 1, ..., Ν-1 у тому ж порядку. Застосування алгоритму найменших квадратів дає оцінку R: é1 * ù Re ê å amdm ú é1 ù êN m ú ë û ˆ R= = Reê å amd* ú m 1 2 êN m ú ë û åa Nm m (6) Центри ФЩІ можна визначити багатьма шляхами. Оскільки точки сукупності є однаковими, спосіб передбачає спочатку побудову інтегральної функції імовірності (ІФІ) з ФЩІ. Групування здійснюється з застосуванням схеми порогів до ІФІ, після чого обчислюються центри груп усередненням у групі з використанням моменту першого порядку. В інших втіленнях можуть бути використання такі процедури, як виділення ознак, що використовується при обробці зображень, причому ознакою може бути, наприклад, пік або еталон, базовані на апроксимації гаусівської ФЩІ. Слід відзначити, що сегментування образу, наприклад, групування і збільшення області, дозволяють групувати точки емпіричної ФЩІ. Порівняння (6) і (4) показує схожість між процесами групування і жорстким декодуванням, де фактичний сигнал sk у (4) заміщений жорстко декодованим символом аm у (6). У типовій системі ВПД, наприклад, системі 20 (Фіг.1) БС кожного разу встановлює один канал зв'язку. У одному з втілень система безпровідного зв'язку розширена для підтримання багатьох користувачів одночасно. Інакше кажучи, система 50 (Фіг.5) дозволяє БС 52 одночасно передавати дані до багатьох користувачів мобільних вузлів 56, 58, 60. Хоча на Фіг.5 показані три мобільні вузли, у системі 50 з БС 52 може мати зв'язок будь-яка кількість мобільних вузлів. Таке розширення дозволяє виконувати багато передач у каналі 54 пакетних даних. Користувачі, що у даний момент обслуговуються каналом даних, називають "активними приймачами". Кожний активний приймач декодує сигнальне повідомлення для визначення Т/П у каналі 54 пакетних даних. Кожний активний приймач обробляє Т/П без уваги до потенціалу для інших активних приймачів. БС приймає вимогу швидкості передачі від кожного активного приймача і призначає потужність пропорційно. У звичайній системі зв'язку з ВПД (Фіг.1) багато інформації відомо a priori, включаючи (без обмеження) інформацію про сукупності, схему кодування, ідентифікацію каналів і наявну потужність для передачі пакетів даних. Інформація про сукупності стосується схеми модуляції, згідно з якою цифрові дані модулюють носій перед передачею. Схеми модуляції включають (але не тільки) маніпуляцію з бінарним фазовим зсувом, маніпуляцію з квадратурним фазовим зсувом (МКФЗ), квадратурно-амплітудне відображення (КАВ) тощо. Схема кодування включає кодування вихідної інформації у цифрову форму і включає (не тільки) турбокодування, кодування з згорткою, кодування з виправленням помилок, наприклад, з використанням КЦН, групи швидкостей тощо. Через КШП приймач може вимагати від сукупностей і інформації про кодування. Ідентифікація каналів включає (але не обмежується) такі розширюючі коди у системах зв'язку розширеного спектра, як коди Уолша, і може включати частоту носія. Ідентифікація каналів може бути заздалегідь визначеною і фіксованою. Потужність передачі для передачі пакетів даних звичайно є відомою і базується на повній наявній потужності передачі і відомій енергії пілот-сигналу. У комбінованій системі частина наведеної вище інформації не є відомою a priori і може змінюватись внаслідок спільного використання наявної потужності і наявних каналів низької затримки, наприклад, голосового зв'язку. Дані порівняння наведені у таблиці. Таблиця 1 Інформація, наявна у системах ВПД ІНФОРМАЦІЯ Цільовий реципієнт Сукупність Кодування Канал(и) Потужність для передачі інф. даних ВПД ЛИШЕ ПАКЕТНІ ДАНІ пакет для ДЕКОДУВАННЯ КШП КШП ФІКСОВАНА КОМБІНАЦІЯ Т/П пакет для ДЕКОДУВАННЯ КШП КШП Не відомо КОМБІНАЦІЯ СИГНАЛЬНИЙ КАНАЛ Повідомлення КШП КШП Повідомлення ФІКСОВАНА Т/П Не відомо Використання сигнального каналу (Фіг.8) дає багато інформації приймачу. Повідомлення ідентифікує цільових реципієнтів і канали передачі даних. Інформація КШП вимагає з визначенням сукупності і кодування. Застосування показника наявної потужності, який в одному втіленні є відношенням наявної потужності трафіка до сили пілот-сигналу, дає міру для визначення швидкості передачі даних. Згідно з одним втілень, яке передбачає використання окремого паралельного сигнального каналу, інформація, що стосується цільового реципієнта, сукупність і кодування передаються у інформаційному каналі і/або КШП, а інформація, що стосується каналів і потужності трафіка для даних, передається у паралельному сигнальному каналі. Застосування втілень і їх комбінацій, описаних вище, дозволяє комбінувати пакетні дані з передачами даних з низькою затримкою у системі безпровідного зв'язку. Як уже відзначалось, комбінування голосу і пакетних даних вносить змінні фактори у процес передачі. Застосування окремих сигнальних каналів забезпечує приймачі системи безпровідного зв'язку інформацією без втрат якості зв'язку. Повідомлення сигнального каналу може ідентифікувати інформацію для цільового реципієнта. Передача показника наявного трафіка до приймача дає інформацію, що допомагає приймачу визначити швидкість передачі, яку необхідно вимагати від передавача. Подібним чином, коли показники трафіка використовуються багатьма користувачами, кожний з яких обчислює з нього потужність передачі, передавач приймає інформацію, яка допомагає йому при призначенні каналів для передач даних до цих користувачів. Отже, були описані нові удосконалені спосіб і пристрій для передачі даних з високою швидкістю. Хоча розглянуті типові втіленя стосувались системи ПДКУ, різні втілення можуть бути застосовані у будь-якій системі, що забезпечує індивідуальні зв'язки з користувачами. Типові втілення були описані для застосування у системах ВПД, але вони можуть бути застосовані і у системах стандартів IS-95, W-CDMA, IS-2000, GSM, TDMA тощо. Фахівцю зрозуміло, що дані, інструкції, команди, інформація, сигнали, біти, символи і елементи коду, згадані у цьому документі, можуть бути репрезентовані напругами, струмами, електромагнітними хвилями, магнітними хвилями або частками, оптичними хвилями або частками або будь-якою їх комбінацією. Наведені компоненти, блоки, модулі, схеми і операції були описані взагалі через їх функції. Фахівцю зрозуміло, що логічні блоки, модулі і операції алгоритмів, які стосуються наведених тут втілень винаходу, можуть бути реалізовані схемно, програмно або комбіновано. Спосіб реалізації цих функцій (схемно або програмно) залежить від конкретного застосування і системних конструктивних обмежень. Зрозуміло, що схемні і програмні рішення є взаємозамінними і їх вибір залежить від конкретних застосувань їх функцій. Логічні блоки, модулі і операції алгоритмів, які стосуються наведених тут втілень винаходу, можуть бути реалізовані через використання процесора загального призначення, процесора цифрових сигналів (DSP), спеціалізованої інтегральної схеми (ASIC), спеціалізованого набору програмованих польових логічних елементів (FPGA) або інших програмованих логічних пристроїв, дискретної ключової або транзисторної логіки, дискретних схемних компонентів, наприклад, регістрів, процесора з ПЗП, будь-якого звичайного програмованого модуля і процесора або будь-якої їх комбінації, здатної виконувати описані функції. Процесор може бути мікропроцесором або звичайним процесором, контролером, мікроконтролером або скінченним автоматом. Програмні модулі можуть зберігатись у RAM, флеш-пам'яті, ROM, ПЗП, НПЗП, регістрах, на жорсткому диску, на знімному диску, CD-ROM або у іншому відомому середовищі зберігання. Процесор можуть бути інтегровані і, як варіант, знаходитись у ASIC (не показаному). ASIC може бути розташована у телефоні (не показаному). У іншому варіанті процесор може знаходитись у телефоні і може бути реалізований як комбінація DSP і мікропроцесора або як два мікропроцесори, спряжені з ядром DSP. Наведений опис бажаних втілень дає змогу фахівцю застосувати винахід. Різні модифікації цих втілень і принципи винаходу дозволять побудувати інші втілення без додаткового винахідництва. Винахід не обмежується цим втіленнями і його об'єм визначається його принципами і новими ознаками.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device (variants) for determining data-transmission rate in a high-speed wireless communication system
Назва патенту російськоюСпособ и устройство (варианты) для определения скорости передачи данных в быстродействующей системе беспроводной связи
МПК / Мітки
МПК: H04Q 7/00
Мітки: даних, зв'язку, пакетів, спосіб, безпровідного, пристрій, системі, передачею, передачі, визначення, варіанти, швидкісною, швидкості
Код посилання
<a href="https://ua.patents.su/11-74213-sposib-i-pristrijj-varianti-dlya-viznachennya-shvidkosti-peredachi-danikh-u-sistemi-bezprovidnogo-zvyazku-z-shvidkisnoyu-peredacheyu-paketiv-danikh.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій (варіанти) для визначення швидкості передачі даних у системі безпровідного зв’язку з швидкісною передачею пакетів даних</a>
Спосіб визначення швидкості зворотного каналу у системі безпровідного зв’язку, пристрій для реалізації цього способу, віддалена станція (варіанти) та базова станція (варіанти)
Номер патенту: 73737
Опубліковано: 15.09.2005
Автори: Бендер Пол І., Падовані Роберто, Гроб Мет'ю Ст'юарт, Кармі Гаді
МПК: H04B 7/26, H04L 1/00, H04Q 7/38
Мітки: цього, базова, швидкості, віддалена, каналу, системі, станція, зворотного, пристрій, безпровідного, визначення, способу, зв'язку, реалізації, спосіб, варіанти
Формула / Реферат:
1. Спосіб визначення швидкості передачі зворотного каналу зазначеної віддаленої станції у системі зв'язку, де кожна базова станція, що підтримує зв'язок з віддаленою станцією, передає біт зайнятості зворотного каналу, який вказує, чи є вичерпаною пропускна здатність зворотного каналу, який включає:визначення швидкості передачі зворотного каналу згідно з об'єднаним сигналом зайнятості зворотного каналу, сформованим згідно з бітами...
Спосіб керування передачами (варіанти), спосіб експлуатації множини передавальних вузлів (варіанти) та спосіб забезпечення передачі даних до множини приймальних вузлів (варіанти) у безпровідній системі зв’язку
Номер патенту: 73979
Опубліковано: 17.10.2005
Автори: Антоніо Франклін П., Волтон Джей Р., Воллес Марк, Голцман Джек
Мітки: вузлів, передавальних, варіанти, керування, забезпечення, даних, передачами, безпровідній, системі, передачі, приймальних, множині, спосіб, зв'язку, експлуатації
Формула / Реферат:
1. Спосіб керування передачами у системі зв'язку, який полягає у:визначенні однієї або декількох характеристик системи зв'язку, включаючи імовірності навантажень для системи зв'язку,розділенні наявних ресурсів системи на множину каналів,визначенні множини коефіцієнтів втрати потужності для множини каналів, на основі щонайменше частково визначених одній або декількох характеристиках системи зв'язку, причому кожний канал...
Спосіб (варіанти) і пристрій для корекції рівня потужності у системі безпровідного зв’язку
Номер патенту: 73813
Опубліковано: 15.09.2005
МПК: H04B 7/005
Мітки: пристрій, потужності, системі, зв'язку, корекції, варіанти, рівня, спосіб, безпровідного
Формула / Реферат:
1. Спосіб відновлення сеансу зв`язку у системі безпровідного зв`язку, який включає: - передачу повідомлення про вимірювання сили пілот-сигналу на першому рівні потужності передачі,- очікування на заздалегідь визначений період часу, і- передачу повідомлення про вимірювання сили пілот-сигналу на другому рівні потужності передачі, вищому за перший рівень потужності передачі.2. Спосіб за п. 1, який відрізняється тим,...
Спосіб і пристрій для контролю потужності передачі у системі з високою швидкістю передачі даних
Номер патенту: 71663
Опубліковано: 15.12.2004
Автор: Бендер Пол Е.
Мітки: швидкістю, системі, спосіб, потужності, високою, пристрій, контролю, даних, передачі
Формула / Реферат:
1. Спосіб контролю потужності передачі у безпровідній системі зв'язку, який включає операції:- вимірювання сукупності характеристик прийнятого сигналу,- генерування одного або кількох контрольних значень швидкості передачі даних (КШП), базованих на цій сукупності характеристик, і- вимикання передавача, базуючись на цих одному або кількох значеннях КШП.2. Спосіб за п. 1, який відрізняється тим, що зазначена операція...
Спосіб і пристрій для формування даних для різних швидкостей передачі даних в системі зв’язку
Номер патенту: 46751
Опубліковано: 17.06.2002
Автори: Падовані Роберто, Тідеманн Едвард Дж. молодший, Зехаві Ефраїм, Оденволдер Джозеф П., Вітлі Чарльз Е. ІІІ
МПК: H04J 3/16
Мітки: пристрій, різних, системі, даних, спосіб, передачі, зв'язку, швидкостей, формування
Формула / Реферат:
1. Спосіб передачі першого кадру даних з швидкістю з першої зумовленої сукупності швидкостей, що належить до сукупності сукупностей швидкостей передачі даних у системі зв'язку, який відрізняється тим, що передбачає операції приймання зазначеного кадру даних, генерування групи бітів контролю парності та кінцевих бітів відповідно до зазначеної сукупності швидкостей для зазначеного першого кадру даних, кодування розширеного кадру даних,...
Попередній патент: Косметичний крем-маска
Наступний патент: Пристрій для очищення забрудненого повітря
Випадковий патент: Спосіб виготовлення пружної призматичної шпонки