Спосіб перетворення енергії в обертальній гвинтовій машині об’ємного типу



Формула / Реферат
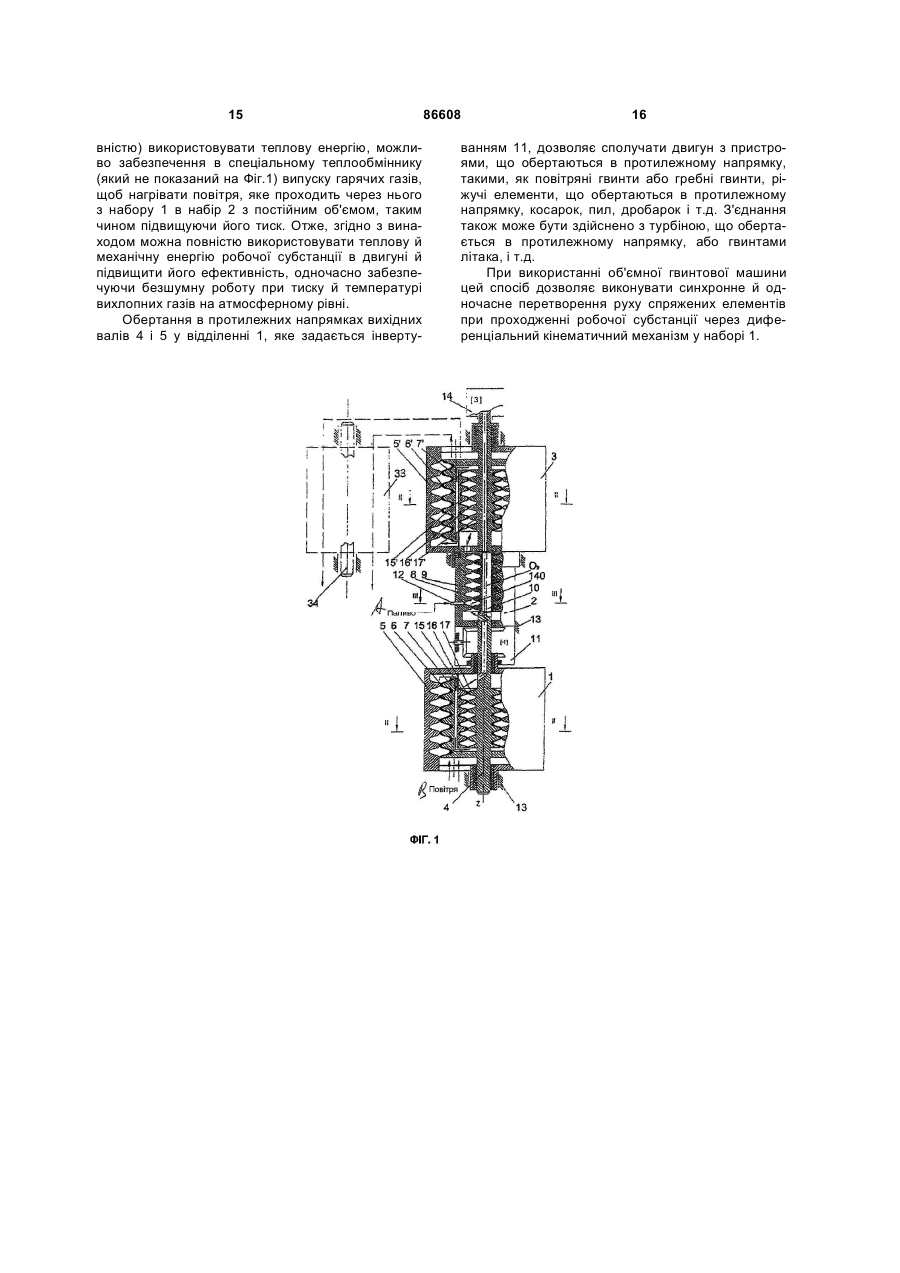
1. Спосіб перетворення енергії в обертальній гвинтовій машині (фіг. 1), яка містить перший набір (1) спряжених охоплюваних і охоплюючих елементів (5, 6, 7; 15, 16, 17) і щонайменше другий набір (2, 3) спряжених охоплюваних і охоплюючих елементів (8, 9; 5', 6', 7'; 15', 16', 17'), віддалений від першого набору (1) по центральній осі машини, причому охоплюючі елементи (5, 6, 15, 16; 8; 5', 6', 15', 16') кожного набору мають внутрішню профільну поверхню (105, 106, 115, 116; 108; 105', 106', 115', 116'), відцентровану по першій повздовжній осі (Z), причому охоплювані елементи (6, 7, 16, 17; 9; 6', 7', 16', 17') кожного набору (1, 2, 3) мають зовнішні профільні поверхні (206, 207, 216, 217; 209; 206', 207', 216', 217'), відцентровані по другій подовжній осі, перша і друга осі паралельні одна одній, і охоплювані елементи розміщені в порожнині відповідних охоплюючих елементів, згідно з яким при обертальному русі охоплюваних і/чи охоплюючих елементів робочі камери, утворені між охоплюючими і охоплюваними елементами, виконують осьове переміщення, і обертальні рухи різних наборів (1, 2, 3) спряжених охоплюваних та охоплюючих елементів синхронізують так, що при русі одного спряженого елемента співвісні поздовжні осі в різних наборах рухаються одна відносно одної з кутовими швидкостями, що відносяться одна до одної відповідно до попередньо встановленого співвідношення, таким чином кутові періоди коливання осьового руху згаданих робочих камер мають різні значення.
2. Спосіб за п. 1, який відрізняється тим, що кутовий період зменшують від одного набору до наступного набору, стискаючи таким чином робоче середовище.
3. Спосіб за п. 1, який відрізняється тим, що кутовий період збільшують від одного набору до наступного набору, розширюючи таким чином робоче середовище.
4. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що використовують порожнистий вал (4) і робоче середовище, що проходить через нього, як засіб синхронізації обертальних рухів різних наборів (1, 2, 3).
5. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що перший набір (1) утворює диференціальний кінематичний механізм, що має три ступені свободи механічного обертання, з яких два ступені свободи є незалежними, а другий набір (2) утворює планетарний кінематичний механізм, що має два ступені свободи механічного обертання, з яких один ступінь свободи є незалежним.
6. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що теплову енергію робочого середовища відводять і подають в теплообмінник.
7. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що механічну енергію, що виробляється в одному з вказаних наборів, використовують для приведення в рух іншого пристрою.
Текст
1. Спосіб перетворення енергії в обертальній гвинтовій машині (Фіг.1), яка містить перший набір (1) спряжених охоплюваних і охоплюючих елементів (5, 6, 7; 15, 16, 17) і щонайменше другий набір (2, 3) спряжених охоплюваних і охоплюючих елементів (8, 9; 5', 6', 7'; 15', 16', 17'), віддалений від першого набору (1) по центральній осі машини, причому охоплюючі елементи (5, 6, 15, 16; 8; 5', 6', 15', 16') кожного набору мають внутрішню профільну поверхню (105, 106, 115, 116; 108; 105', 106', 115', 116'), відцентровану по першій повздовжній осі (Z), причому охоплювані елементи (6, 7, 16, 17; 9; 6', 7', 16', 17') кожного набору (1, 2, 3) мають зовнішні профільні поверхні (206, 207, 216, 217; 209; 206', 207', 216', 217'), відцентровані по другій подовжній осі, перша і друга осі паралельні одна одній, і охоплювані елементи розміщені в порожнині відповідних охоплюючих елементів, згідно з яким при обертальному русі охоплюваних і/чи охоплюючих елементів робочі камери, утворені між охоплюючими і охоплюваними елементами, виконують осьове переміщення, і обертальні рухи різних наборів (1, 2, 3) спряжених охоплюваних та охоплюючих елементів синхронізують так, що при C2 2 UA 1 3 ють елементи. Вони відцентровані по осях, які паралельні, і які звичайно не співпадають, і відстоять один від одного на довжину Ε (ексцентриситет). З патенту США 5439359 відома обертальна гвинтова машина тривимірного типу, що належить до даного типу, в якій охоплюваний елемент, оточений нерухомим охоплюючим елементом, здійснює планетарний рух відносно охоплюючого елемента. Робочі камери обертальних об'ємних гвинтових машин із внутрішнім сполученням утворені кінематичними механізмами, що складаються з цих охоплюваних і охоплюючих криволінійних елементів. Перетворення рухів засновано на взаємозв'язаному обертальному русі охоплюваних і охоплюючих елементів, що вступають в механічний криволінійний контакт один з одним і створюють ці закриті робочі камери для робочої субстанції, яка переміщається по осі при здійсненні відносного руху спряжених елементів в просторі. В більшості випадків гвинтові поверхні мають форму циклоїди (трохоїди), як, наприклад, у прикладі, відомому з французького патенту FR-A997957 і патенту США 3975120. Перетворення руху, що використовується в двигунах, описано В. Тираспольским у курсі буріння „Гідравлічні свердловинні двигуни в бурінні" („Hydraulical Downhole Motors in Drilling"), стор. 258-259, опублікованому в Паризькому виданні «TECHNIP». Ефективність способу перетворення енергії в гвинтових машинах згідно попереднього рівня техніки визначають інтенсивністю термодинамічних процесів, що відбуваються в машині, й характеризують узагальненим параметром „кутовий цикл". Цикл рівний куту повороту будь-якого обертального елемента (охоплюваної, охоплюючої або синхронізуючої ланки), вибраного як елемент з незалежним ступенем свободи. Кутовий цикл рівний куту повороту елемента з незалежним ступенем свободи, за який відбувається весь період зміни площі перерізу (відкриття і закриття) робочої камери, утвореної охоплюваним і охоплюючим елементами, а також осьове переміщення робочих камер за один період Рm в машинах із внутрішньою гвинтовою поверхнею або за один період Pf в машинах з зовнішньою гвинтовою поверхнею. Відомі способи перетворення енергії в об'ємних гвинтових машинах обертального типу із спряженими елементами криволінійної форми, що використовуються в подібних об'ємних машинах, мають наступні недоліки: - обмежений технічний потенціал через недосконалий процес організації руху, який не може підвищити кількість кутових циклів за один оберт приводного елемента з незалежним ступенем свободи; - обмежена питома потужність подібних гвинтових машин; - обмежена ефективність; - існування реактивних сил на нерухомому корпусі машини. В усіх випадках повздовжні осі гвинтових елементів внутрішнього сполучення є паралельними. 86608 4 Іноді вони мають ексцентриситет, і деякі з них можуть бути рухомими. При цьому здійснюється або планетарний рух, або диференціальний рух. Метою даного винаходу є усунення вищезазначених проблем. Об'ємна гвинтова машина, що використовується у винаході, містить щонайменше два набори спряжених охоплюваних і охоплюючих елементів, віддалених один від одного, переважно по центральній осі машини. Охоплюючі елементи кожного набору мають внутрішню профільну поверхню, центровану навколо першої повздовжньої осі, а охоплювані елементи кожного набору мають зовнішню профільну поверхню, центровану навколо другої повздовжньої осі. Перша і друга повздовжні осі паралелі одна одній. Охоплювані елементи розміщені в порожнинівідповідних охоплюючих елементів. У способі перетворення енергії в обертальній гвинтовій машині згідно з винаходом при обертальному русі охоплюваних і/чи охоплюючих робочих елементів робочі порожнини, які утворені між охоплюючими і охоплюваними елементами, здійснюють осьове переміщення. Згідно з винаходом обертальні рухи різних наборів синхронізують таким чином, що синхронний і синфазний рух елементів у різних наборах виконується з різними значеннями кутових періодів коливання осьового руху вказаних робочих камер. Іншими словами, частини (або елементи) машини розташовані таким чином, що при русі одного спряженого елемента співісні повздовжні осі в кожному наборі переміщуються з кутовими швидкостями, які мають значення, що характеризуються заданим відношенням (одне відносно іншого). Синхронізація допомагає оптимізувати функціонування машини. У переважному варіанті виконання винаходу кутовий період зменшується від одного набору до наступного набору, стискаючи, таким чином, робоче середовище. В альтернативному варіанті виконання кутовий період зростає від одного набору до іншого набору, розширюючи, таким чином, робоче середовище. Варіант виконання машини містить як ротор, так і контрротор, причому останній обертається в протилежному напрямку відносно ротора. Між ними можуть бути розміщені елементи, що рухаються планетарно. Цей варіант виконання сприяє стабільному й урівноваженому переміщенню робочого середовища в робочих камерах. Засобом зчеплення може бути механічний пристрій. Як альтернатива, для зчеплення різних наборів може бути використано робоче середовище. В поєднанні даних альтернатив засіб синхронізації містить (щонайменше, частково) порожнистий вал, крізь який проходить робоче середовище. В ще одному переважному варіанті виконання використаний перший набір, що створює диференціальний кінематичний механізм, що має три ступені свободи механічного обертання, з яких два ступені свободи незалежні, і другий набір, що створює планетарний кінематичний механізм, що має два ступені свободи механічного обертання, з яких один ступінь свободи незалежний. Третій 5 набір спряжених елементів може утворювати диференціальний кінематичний механізм. Машина, в такому разі, може бути виконана таким чином, що спряжені елементи першого й третього наборів мають по суті рівні перерізи. Іншими словами, перший і другий набори можуть мати однакову конструкцію і можуть бути зчеплені за допомогою другого набору. Зокрема, середні радіуси і/чи товщина і/чи хвилястості гвинтових елементів рівні. Набори, звичайно, можуть містити більше елементів, ніж єдиний охоплюваний і єдиний охоплюючий елемент. У переважному варіанті виконання є гніздова конструкція. Наприклад, вищезазначені перший і другий набори можуть містити дві групи спряжених охоплюваних і охоплюючих елементів, які розділені каналом, по якому можна транспортувати робоче середовище. У ще одному переважному варіанті виконання способу згідно з винаходом теплову енергію робочого середовища відводять і подають в теплообмінник (відводять з робочого середовища на першій стадії і подають на другій стадії, або навпаки). Крім того, механічну енергію, що виробляється в одному з вказаних наборів, можна використовувати для приведення в рух іншого механічного пристрою. Іншими словами, з обертальної гвинтової машини можна витягувати механічну енергію. Звичайно, слід брати до уваги добре відомі закони термодинаміки, зокрема, в цей же час у деяких ділянках машини або робочого середовища відбуватимуться температурні зміни. Винахід стане більш зрозумілим після прочитання опису переважного варіанту його виконання, який наведений нижче з посиланням на креслення, на яких: Фіг.1 - повздовжній розріз об'ємної гвинтової машини, що використовується в даному винаході; Фіг.2 - схематичний вид об'ємної гвинтової машини з Фіг.1; Фіг.3 - переріз по лінії ІІ-ІІ з Фіг.1 об'ємної гвинтової машини, показаної на Фіг.1; Фіг.4 - переріз по лінії Ill-Ill, з Фіг.1 об'ємної гвинтової машини, показаної на Фіг.1; Фіг.5 - ілюстрація того, як може бути сконструйований кінцевий профіль гвинтової поверхні будь-якого зі спряжених елементів; і Фіг.6 - виконана в електронній системі автоматизованого проектування побудова гвинтової поверхні спряженого елемента, що має порядок симетрії nm=4. Об'ємна гвинтова машина, що використовується в даному винаході, яка показана на Фіг.1 і 2, містить три набори спряжених елементів, а саме перший набір 1, який створює диференціальний кінематичний механізм, призначений для всмоктування і для стискання повітря, другий набір 2, який створює планетарний механізм, призначений для стискання повітря (і для забезпечення спалювання палива в його камері 140), і третій набір 3, який створює диференціальний кінематичний механізм, який призначений для розширення продуктів згоряння з камер 140 набору 2. Іншими словами, об'ємною гвинтовою машиною, що використовується для винаходу, є обер 86608 6 тальний гвинтовий двигун внутрішнього згоряння, в якому здійснюється перетворення руху, і в якому безперервно-циклічна зміна енергії робочої субстанції відбувається синхронно з процесом передачі цієї робочої субстанції через робочі камери різних відділень. Отже, об'ємна гвинтова машина виробляє енергію робочої субстанції. Є синхронізатори 11 і 14, які призначені для підтримки роботи набору 1 і набору 3, відповідно. Вони можуть бути виконані у вигляді єдиного елемента, як показано на Фіг.2 Слід зазначити, що різні набори 1, 2 і 3 об'ємної гвинтової машини згідно з винаходом відстоять один від одного по центральній осі Ζ машини. Іншими словами, набори 1, 2 і 3 не оточують один одного. Швидше вони розміщені один за іншим, або, іншими словами, один на лінії іншого. Всі вони відцентровані по центральній осі машини. Різні набори зчеплені як механічним зв'язком, так і дією газової робочої субстанції, тобто газовим зв'язком. Механічний зв'язок між механізмами 1, 2 і 3 забезпечений звичайним валом 4, який є частково порожнистим, і, крім того, має кривошип 10, приєднаний до нього. Повітря може проходити з механізму набору 1 в механізм набору 2 через порожнисту ділянку валу 4. Набори 1 і 2 разом утворюють обертальну гвинтову компресійну машину (компресор) об'ємного типу. Набір 2 забезпечує камери 140 згоряння, а набори 2 і 3 при спільній роботі утворюють розширену обертальну гвинтову машину (детандер) об'ємного типу. Як перший, так і другий набори 1 і 3 містять дві групи спряжених елементів, а саме - першу групу елементів 5, 6 і 7 (5', 6' і 7') і другу групу, що складається з елементів 15, 16 і 17 (15', 16' і 17'). Слід зазначити, що перший набір 1 і другий набір 3, по суті, мають однакову форму, тобто мають однакові перерізи. Це особливо стосується окремих гвинтових елементів: вони мають однакові середні радіуси й однакову товщину. Машина містить наступні деталі. Перший набір містить перші охоплюючі елементи 5 і 15, що мають внутрішні профільні поверхні 105 і 115, відповідно, при цьому охоплюючі елементи 5 і 15 відцентровані по нерухомій осі Z, тобто осі симетрії об'ємної гвинтової машини. Охоплюючі елементи 5 і 15 мають порядок симетрії 6. Далі, поняття „порядок симетрії" стосується обертальної симетрії кінцевої поверхні цих елементів. Перший набір додатково містить другі елементи 6 і 16, які є як охоплюваними, так і охоплюючими, тобто містять як зовнішню трохоїдальну поверхню 216, 116, так і внутрішню трохоїдальну поверхню 206, 106. Вони мають порядок симетрії 5 і відцентровані по власній осі О6 і О16 відповідно. Вони виконують планетарний рух. Забезпечені синхронізуючі елементи 7 і 17, мають зовнішню профільну поверхню 207 і 217, відповідно, з порядком симетрії 4. Між цими елементами є робочі камери 100, 300 з одного боку і 200 і 400 з другого боку. Між елементами 5, 6 і 7 з одного боку і 15, 16 і 17 з другого боку є канал такий, що повітря, яке транспортується в робочі камери 100 і 200, може бути повернено до нижньої (на Фіг.1) сторони об' 7 ємної гвинтової машини, а потім транспортовано далі, в робочі камери 300 і 400. Другий набір 2 містить тільки два спряжені елементи, а саме - охоплюючий елемент 8, що має внутрішню профільну поверхню 108 з порядком симетрії 3, яка також відцентрована по осі Z, і охоплюваний елемент, що має зовнішню профільну трохоїдальну поверхню 209 з порядком симетрії 2, яка відцентрована по осі О9 і виконує планетарний рух. Робочі камери 140 виконані між цими елементами. Паливо може бути подане через елемент впускання 12 у ці робочі камери 140. Третій набір 3 містить у кожній групі перший охоплюваний елемент 7' і 17', відповідно, що має зовнішні поверхні 207' і 217', відповідно, з порядком симетрії 4, які відцентровані по нерухомій осі Z. Другі елементи 6' і 16', які одночасно є і охоплюваними, і охоплюючими, містять початкові трохоїдальні поверхні 106', 206' і 116', 216', причому обидві мають порядок симетрії 5. Ці елементи 6' і 16' відцентровані по других осях О6', О16' і виконують планетарний рух. Елементи 5' і 15', що мають внутрішні поверхні 105' і 115' з порядком симетрії 6, діють як синхронізуючі елементи. Між цими елементами утворені робочі камери 100', 300' з одного боку і робочі камери 200', 400' з другого боку. Набір 1, показаний на Фіг.1, який утворює диференціальний механізм, має три ступені свободи механічного обертання елементів 5, 6, 7 і 15, 16, 17. Два з цих ступенів є незалежними ступенями свободи обертання. Те ж саме застосовно до елементів 5', 6', 7' і 15', 16' і 17' набору 3, які також створюють диференціальний механізм. Планетарний кінематичний механізм перетворення руху набору 2, показаний на Фіг.1, має два ступені свободи механічного обертання елемента 9. Один його ступінь є незалежним ступенем свободи обертання. Згідно з винаходом перетворення енергії може бути здійснене перетворенням руху спряжених елементів у вигляді механічно зв'язаних рухів елементів наборів груп кінематичного механізму, а саме - груп, утворених спряженими елементами 5, 6, 7, 15, 16, 17 і 8, 9, які розташовані співвісно з ексцентриситетом у внутрішніх порожнинах один одного. Крім того, можуть бути використано синхронізуючі ланки 10 зчеплення, а також пристрої 11 узгодження, які виконують синхронізований взаємозв'язаний рух елементів навколо головної осі машини і навколо їх власних осей. Щоб зробити це, перетворення руху виконують синхронно в щонайменше двох групах кінематичних механізмів, де рух взаємно спряжених елементів перетвориться, щоб отримати енергію робочої субстанції. Спосіб згідно з винаходом сприяє здійсненню перетворення руху спряжених елементів, синхронно й одночасно, тоді як робоча субстанція проходить через диференціальні кінематичні механізми в наборі 1, які механічно сполучені один з одним і, наприклад, утворюють відділення всмоктування і стискання, як показано на Фіг.1. Щонайменше цей диференціальний кінематичний механізм, утворений у наборі 1, має три ступені свободи механічно 86608 8 го обертання, з яких дві незалежні, а планетарні кінематичні механізми з набору 2, показаного на Фіг.1, містять відділення стискання й випуску робочої субстанції, що має один незалежний ступінь свободи обертання, причому в диференціальному і планетарному механізмах є різні значення кутових періодів осьового переміщення робочих камер (при відліку від кута повороту вихідної ланки 4). Слід зазначити, що гвинтові елементи не можуть мати довільну форму, і повинні мати точно задані властивості. їх чітко визначена форма dm, яку конструюють нижчеописаним чином, як розкрито з посиланням на Фіг.5, де профіль dm має порядок симетрії nm =5. Починаємо з побудови гіпоциклоїди Г, яка має параметричну форму (залежить від параметра t): x(t)=E cos(nm-1)t+E(nm -1)cos t y(t)=E sin(nm-1)t-E(nm-1)sin t Такі гіпоциклоїди Г з порядком симетрії nm , (nm +1), (nm +2), ... (nm +i) є тими кривими, які описує точка А кола, що має радіус О1А=Е і центр ОЕ, і яку прокотили (без ковзання) по внутрішній поверхні іншого кола з радіусом, рівним Enm, E(nm +1), E(nm +2),... (nm +i), має центр Om , як показано на Фіг.1. Точки, в яких точка А контактує з цими колами, позначені В, С, D, F, І. Еквівалентний спосіб побудови такої гіпоциклоїди Γ з порядком симетрії nm, (nm +1), (nm +2),... (nm+і) заснований на описанні кривою точкою А кіл з радіусами Е(nm +1), Е(nm +2), ... Е(nm +1+і) і центром О2, яка котиться (без ковзання) по внутрішній поверхні кіл, що мають радіус, рівний Enm , E(nm +1), E(nm+2), ... E(nm +2+i). Профіль Dm, що використовується для гвинтових елементів у даному винаході, починаючи з гіпоциклоїди Г, одержують коченням кола з радіусом r0, який рівний, наприклад, 2Е, r0=FR=2E на Фіг.6, по гіпоциклоїді Г, причому при коченні центр цього кола переміщується по гіпоциклоїді. Якщо r0 вибраний таким, що монотонно змінюються по осі z (осі, перпендикулярній площині креслення на Фіг.1), одержуємо для профілю Dm параметричні рівняння (залежно від параметра t): x(t)=E(cos[(n/(n+1))[arcsin(sin t)-t]]+n cos[(arcsin(sin t)-t)/(n+1)) +r0(z)cos[arcsin(sin t)-(arcsin(sin t)-t)/(n+1)]; y(t)=E(sin[(n/(n+1))[arcsin(sin t)-t]]+n sin[(arcsin(sin t)-t)/(n+1)]) +r0(z)sin[arcsin(sin t)-(arcsin(sin t)-t)/(n+1)]; де n=nm-1 або n=nf-1. На Фіг.6 показано тривимірне представлення гвинтового елемента, отриманого використанням вищеописаної побудови. Всі зовнішні поверхні 217, 216, 207, 206, 217', 216', 207', 206', 209 охоплюваних елементів 17, 16, 7, 6, 17', 16', 7', 6' і 9 і всі внутрішні поверхні 105, 106, 115, 116, 105', 106', 115', 116', 108 охоплюючих елементів 5, 6, 15, 16, 5', 6', 15', 16' і 8, відповідно, радіально обмежені такими не циліндричними гвинтовими поверхнями, побудованими, як описано вище. Слід зазначити, що порядок симетрії цих поверхонь зростає зсередини назовні. В другому наборі гвинтовий елемент 9 має порядок симетрії 2, тоді як гвинтовий елемент 8 має порядок симетрії 3 . В першому наборі 1 і третьому наборі 3 самий внутрішній елемент 17, 17' має порядок симе 9 трії 4 і оточений елементом 16, 16' з порядком симетрії 5, який сам оточений елементом 15, 15', що має внутрішню профільну поверхню 115, 115' з порядком симетрії 6. Ця послідовність порядків симетрії потім повторюється, починаючи з елемента 7, 7' і до елемента 5, 5'. Елементи 5, 7, 15, 17, 5', 7' 15', 17' встановлені так, що вони можуть обертатися навколо осі Z. Осі О6, О16, О6', О16', О9 елементів 6, 16, 6', 16' і 9, відповідно, є рухомими. Слід зазначити, що вісь Об має ексцентриситет Е1=Е відносно центральної осі Z, і що вісь О16 має ексцентриситет Е2 (менше Ε1) відносно центральної осі Z. Ці осі О6 і Ο16 розміщені на лінії, що перетинає центральну вісь. Під час обертання їх просторове відношення залишається незмінним. Іншими словами, якщо ексцентриситети вибрані так, щоб отримати статично урівноважену об'ємну гвинтову машину, то гвинтова машина також буде динамічно урівноваженою. Елементи 6, 16 і 9 встановлені в машині так, щоб вони могли виконувати планетарний рух навколо осі Z. Елементи 6,16, 6', 16' встановлені між елементами 5, 7; 15, 17; 5', 7' і 15', 17', відповідно, без жодних додаткових засобів запуску планетарного руху ротора. Ротор 6 шарнірно встановлений на кривошипі 10 валу 4. В диференціальних механізмах 1 і 3 і планетарному механізмі 2 зв'язки встановлено так, щоб зробити можливим виконання об'ємного безперервно-циклічного всмоктування із стисканням в наборі 1, стискання з випуском робочої субстанції в робочі камери 140 набору 2 і розширення робочої субстанції в робочих камерах 100', 200', 300', 400' набору 3. Слід зазначити, що відділення спалювання з камерою 140 згоряння утворено елементами планетарного механізму 2, переріз якого показаний на Фіг. 4. Планетарний механізм 2 складається з центрального нерухомого статора 8 і планетарного ротора-сателіта 9, кривошипа 10 на валу 4. Пристрій 12 призначений для вприскування палива в камеру 140 і для забезпечення його запалювання. Камери 140 згоряння можуть бути утворені одним періодом біротативного ходу профілів елементів 8 і 9 або двома періодами ходу (для спалювання палива в постійному об'ємі). При нерухомому елементі 8 планетарний рух елемента 9 визначають наступними параметрами: w8=0, порядок симетрії n8=3; n9=2; w1=wобертання(9)=1; w9=wповороту(9) = -0,5. Загальний об'єм у наборі 2 заданий як V2= (3×V140×360/360) =3V140 для обертання валу 4. В кожному наборі може бути здійснено обертання охоплюючих гвинтових елементів 8 навколо центральної осі. Як альтернатива, елемент 8 може бути стаціонарним. Планетарний рух охоплюваного елемента 9, спряженого з першим елементом, може бути виконано за допомогою синхронізуючої зчіпної ланки -кривошипа 10 третього (охоплюваного) спряженого гвинтового елемента, який є співвісним першому елементу. Звертаючись тепер до першого набору, можна вибрати три види стану першої групи елементів 5, 6 і 7: a) обертання (або стан нерухомості) першого елемента 5 навколо центральної нерухомої осі й 86608 10 обертання (або стан нерухомості) третього елемента (синхронізатора) 7 навколо центральної нерухомої осі, b) обертання осі О6 другого елемента 6 навколо нерухомої центральної осі, і c) поворот другого елемента 16 за допомогою синхронізуючої зчіпної ланки (охоплюваного спряженого гвинтового елемента 7), яка співвісна першому. Ці три види станів можна (механічно) синхронізувати, кожне з відповідним одним з другої групи елементів 15,16 і 17 першого набору 1, що містить: d) обертання (або стан нерухомості) першого елемента 15 навколо центральної нерухомої осі і обертання третього елемента (синхронізатора) 17 навколо центральної нерухомої осі, є) обертання осі О16 другого елемента 16 навколо нерухомої центральної осі, і f) поворот другого елемента 16. Кутовий цикл Ті пари з охоплюючого і охоплюваного спряжених елементів заданий рівнянням: 2p Ti = nm, f (wf / wl ) - ( wm / wl ) де: wf, wm - власні кутові швидкості охоплюючого і охоплюваного елементів навколо їх власних центрів; ωl - кутова швидкість незалежного елемента, наприклад, елемента, що виконує обертання, кут якого визначає значення Ti; nm, f - порядок симетрії, nm, f - для гіпотрохоїдальної схеми із зовнішньою огинаючою, і nf - для епітрохоїдальної схеми з внутрішньою огинаючою. Диференціальний рух (що містить планетарний рух елементів 6 і 16 і обертання елементів 15, 15' і 17, 17') в наборі 1 визначають наступними параметрами: wrо(5, 15)=1; wrо(7, 17)=-1; (wro(7, 17)- wre(6, 16))/(wro(5, 15)wrе(6, 16))=n5, 15/n7, 17 і wre(O-6), (O-16)=(wrо(5, 15)n5, 15-ωro(7, 17) n7, 17)/(n5, 15-n7, 17)=(6+4)/(6-4)=5; (ws(6, 16)- wre(6, wm(6,16)= 16))/(ωro(5, 15)- wrе(6, 16))=n5, 15/n6, 16 і ws(6,16)=(wro(5,15)-wre(6, 16))(n5, 15/n6, 16)+wrе(6, 16)=(15)(6/5)+5=0,2. Загальний об'єм робочих камер 100, 300, які керують обертанням валу 4, заданий як VT(100)=6V100360/90=24V100 і \/Т(300)=6\/300360/90=24\/300. Загальний об'єм робочих камер 200 і 400 під час обертання валу 4 заданий як VT(200)=5V200360/75 = 24V200 і VТ(300)=5V300360/75=24V300. Звертаючись тепер до третього набору 3, слід зазначити, що диференціальний рух з фіксованими елементами 7', 17', обертання елементів 5, 15 або 5', 15' з кутовою швидкістю, заданою редуктором 18 від валу 4 (незалежний рух), і планетарний рух елементів 6', 16' (залежний рух) визначають наступними параметрами: w5', 15'=wrо(5', 15')=1/3; wrо(7', 17')=0; wrе(О-6', О16')=(wrо(5', 15')n5', 15')/(n5', 15'- n7', 17')=2/(6-4)=1, і ws(6', 16')=(wre(5', 15')- wre(6', 16'))/(n5', 15'/n6', 16')+ wrе(6', 16')=(1/31)/(6/5)+1=0,2. 11 Загальний об'єм робочих камер 100' і 300' набору 3 під час обертання валу 4 заданий як wT(100')=6V100”2p/3p=4V100' і VT(300')=6V300'2p/3p=4V300' Загальний об'єм робочих камер 200' і 400' під час обертання валу 4 заданий як VT(200')=5V200'2p/2,5p=4V200' і VT(400')=5V400’2p/2,5p=4V400’. З вищезгаданого очевидно, що у разі диференціального руху елементів кутовий цикл можна, згідно з винаходом, варіювати зміною відносних кутових швидкостей руху гвинтових елементів, що створюють робочі камери. Кутовий цикл може складати 90 градусів в наборі 1, 360 градусів у наборі 2, 540 градусів у наборі 3. Іншими словами, його можна зменшити (стискаючи таким чином робоче середовище), і його можна збільшити (таким чином згідно з винаходом розширюючи робоче середовище). Тоді ефективність способу згідно з винаходом може бути підвищена. Напрямок осьового руху робочого середовища вздовж осі Ζ у камерах 100, 200 і 300, 400 визначають напрямком обертання центрів О6, О16 елементів 6, 16 у наборі 1. Як згадано вище, щоб вибрати однакові напрямки руху робочого середовища, задають однаковий напрямок обертання центрів О6, О16. При бажанні вибрати протилежні напрямки руху робочого середовища в камерах 100, 200, з одного боку, і 300, 400 - з другого боку, обертання центрів О6, О16 має виконуватися в протилежних напрямках. У всмоктуючому наборі 1 зі стисканням виконують з випуском (викидом) робочої субстанції в механізм 2. Через вибір різних кінематичних схем 1 і 2 значення кутового періоду осьового руху робочих камер, що відлічуються від кута повороту вихідної ланки 4, також різні. Набір 1, що складається з груп елементів 5, 6, 7 і 15, 16 і 17 утворює відділення всмоктування і попереднього стискання, в якому виконується безперервно-циклічне східчасте стискання повітря. Група елементів 8 і 9 в наборі 2 забезпечує остаточне стискання і випуск (викид) робочого середовища. Робочі камери 100, 200 усмоктування в диференціальному механізмі 1 утворені зовнішньою групою спряжених елементів 5, 6, 7, які розташовані співвісно з ексцентриситетом у внутрішніх порожнинах один одного. Попереднє стискання виконується, коли повітря накачується у внутрішню групу спряжених елементів 15, 16, 17. Синхронізуючий пристрій 11 служить для приведення елементів-роторів 5, 7 і 15, 17 у наборі 1 в обертання в різних напрямках з рівними кутовими швидкостями, тобто з протиобертанням. Одночасно приводять в обертання вал 4 ротора 9 у наборі 2. Камери остаточного стискання 140 в планетарному механізмі 2 утворені елементами 8 і 9, де елемент 9 шарнірно закріплений для обертання за допомогою самосинхронізації на кривошипі 10 валу 4. Інший елемент 8 є нерухомим. Взаємозв'язок обертальних рухів елементів 5, 7 і 15, 17 в наборі 1 і 9 в наборі 2 з обертальними рухами елементів 5' і 15' у наборі 3 (шарнірно закріпленими для обертання в нерухомому корпусі 13) навколо центральної осі Ζ оснащена жорстким 86608 12 механічним з'єднанням елементів 5', 15' з валом 4 в наборі 3 за допомогою синхронізуючого пристрою 14, що має передавальне відношення 3, шарнірним з'єднанням елемента 9 з валом 4 в наборі 2 і механічним з'єднанням елементів 5 і 15 (шарнірно закріплених для обертання в нерухомому корпусі 13) в 1 з валом 4 за допомогою синхронізуючого пристрою 11, яким є інвертування напрямку обертання, що має передавальне відношення - 1. Елемент 8 (статор) в наборі 2, елементи 7', 17' (статори в наборі 3) механічно жорстко сполучені з нерухомим корпусом 13. Механічне з'єднання елементів 5', 15' в наборі 3 (шарнірно приєднаних для обертання в нерухомому корпусі 13) з валом 4 виконують за допомогою пристрою синхронізації 14, яким є редуктор обертального руху, що має передавальне відношення 3. Паралельно із забезпеченням синхронізації обертання елементів усередині диференціальних механізмів 1 і 3 забезпечена синхронізація обертання між групами диференціальних і планетарних механізмів 1 і 3, з одного боку, і 2 - з другого боку. Також можна синхронізувати обертання елементів планетарного й диференціального механізмів за допомогою чергування порядків симетрії елементів всіх груп 1, 3 або 2. Вибір кількості груп перетворення і схеми того, як поєднуються планетарні і диференціальні кінематичні механізми, визначається необхідним кутовим чинником і поєднанням значень періодів осьового переміщення в робочих камерах між цими механізмами. Робота двигуна, показаного на Фіг.1, полягає в наступному: газову складову робочої субстанції двигуна (наприклад, повітря) впускають у набір 1 через відкриту ліву торцеву поверхню елементів 5, 6 і 7 (там, де на Фіг.1 показані стрілки) першої групи. Потім її подають у відкриту ліву торцеву поверхню елементів 15, 16 і 17 другої групи через канал (зазор). Вищезазначені групи елементів 5, 6, 7 і 15, 16, 17 (разом з елементами 8, 9) утворюють обертальний гвинтовий повітряний компресор 1 об'ємного типу. Через канал у валу 4 стиснуте повітря виводять з набору 1 і подають у відкриту ліву торцеву поверхню елементів 8 і 9 набору 2 спалювання, а саме - в камеру 140 згоряння. Ступінь стискання складає 8(V100+V200)A/140. Услід за наповненням камери 140 згоряння шістьма об'ємами повітря з компресора 1 і її закриттям пристрій 12 уприскує паливо в камеру 140 і запалює його. В циклі згоряння при постійному тиску (як у циклі Дизеля) камера 140 може бути утворена за один період біротативного ходу елементів 8 і 9, і запалювання палива може бути виконано завдяки стисканню повітря. В циклі згоряння при постійному об'ємі (як у циклі Отто) камера 140 може бути утворена за два періоди біротативного ходу елементів 8 і 9, і запалювання палива може проводитися свічкою запалення. Крім того, запалену суміш з палива і повітря потім відводять від відкритої торцевої поверхні елементів 8 і 9 для розширення у відділенні 3 розширення до відкритої нижньої торцевої поверхні елементів 15', 16', 17' і 5', 6', 7' набору 3. 13 Набір 3 - є розширеною обертальною машиною (детандер) об'ємного типу, в якій процес розширення горючої суміші виконує роботу над валом 4 двигуна. Якщо горюча суміш підготовлена, її випускають з верхнього кінця набору 3 (показано стрілками). Коли вал 4 обертається, спряжені елементи 5, 6, 7, 15, 16 і 17 у наборі 1 обмежують і переміщають робоче середовище відділення 1 всмоктування (6 камер між елементами 5, 6 і 15, 16 і 5 камер між елементами 6, 7 і 16, 17 уздовж осі Z) переміщенням їх контактних ділянок сполучення на два незалежні ступені свободи обертального руху елементів 5, 7, 15, 17 у наборі 1 у протилежному напрямку, як визначено вузлом 11. Коли вал 4 обертається, спряжені елементи 8 і 9 у наборі 2 обмежують і переміщають три робочі камери 140 відділення 2 спалювання вздовж осі Ζ переміщенням їх контактних ділянок сполучення на один незалежний ступінь свободи обертального руху елементів 9 в наборі 2 за допомогою кривошипа валу 4. Коли вал 4 обертається, спряжені елементи 5', 6', 7', 15', 16', 17' у наборі 3 обмежують і переміщають робочі камери відділення 3 розширення і випуску (6 камер між елементами 5', 6', 15', 16' і 5 камер між елементами 6', 7', 16', 17' у кожній групі) вздовж осі Ζ переміщенням їх контактних ділянок сполучення з одним незалежним ступенем свободи обертального руху елементів 6', 16' у наборі 3. Повний цикл осьового руху робочих камер між елементами 5', 6', 7', 15', 16', 17' за один оберт валу 4 в наборі 1 відбувається чотири рази за оберт валу 4. Іншими словами [4(V100'+V200']/[4(V300'+V400')]x[4(V300'+V400')]/3V140 =[4(V100'+V200'-]/3V140. Взаємозв'язані обертальні рухи навколо головної осі Ζ машини і навколо їх власних осей відбуваються в усіх наборах 1-3 з трьома ступенями свободи механічного обертання. У двигуні, показаному на Фіг.1, механічно зв'язані ротори 5, 15 і механічно зв'язані контрротори 7 і 17 одночасно обертаються навколо осі Ζ у протилежних напрямках з однаковими відносними швидкостями w(5, 15)=-1 і w(7, 17)=1. Відносна кутова швидкість соте лінії центрів О6-О-О-16 роторів 6 навколо осі Ζ відносно швидкості роторів 5, 7 задана як wre=5, тоді як відносна кутова швидкість ws(6, 16) роторів-сателітів 6, 16 навколо їх осей О6, О16 задана як ws(6, 16)=0,2. Ступінь стискання k1 у наборі 1 визначають як відношення суми добутків повного об'єму шести камер між елементами 5, 6 і повного об'єму п'яти камер між елементами 6, 7 до суми добутків повного об'єму шести камер між елементами 15, 16 і повного об'єму п'яти камер між елементами 16, 17, помножене на число циклів зміни об'єму за один оберт валу 4, а саме: k1=24(V100+V200)/[24(V300+V400)]=(V100+V200)/2(V3 00+V400). Ступінь стискання k2 в наборі 2 заданий як відношення суми добутків до добутку, тобто першого добутку повного об'єму шести камер між елементами 15 і 16 в наборі 1 і другого добутку повного об'єму п'яти камер між елементами 16 і 17 в наборі 1 до добутку повного об'єму трьох камер 86608 14 згоряння між елементами 8 і 9 в наборі 2 за один оберт валу 4, а саме: k2=24(V300+V400)/3V140=8(V300+V400)/V140. Повний ступінь стискання до двигуна рівний добутку ступенів стискання в наборах 1 і 2, k=k1k2=8(V100+V200)/V140. Є можливість отримання будь-якого ступеня стискання в камері 140 для цілей даного винаходу, яка потрібна в різних двигунах, виборомвідповідних відношень геометричних об'ємів камер у наборах 1 і 2. Також є можливість забезпечення будь-якого режиму стискання, адіабатного або політропного режиму стискання. Здійснення камерою 140 двох періодів біротативного ходу елементів 8 і 9 дозволяє виконати спалювання суміші з палива і повітря з осьовою передачею газу з однієї камери в іншу при постійному об'ємі. Таким чином, підвищена термодинамічна ефективність двигуна. Робота випускного набору 3 відбувається з нерухомими елементами 7,17'. Всі спряжені елементи 5', 6', 7', 15', 17' разом обмежують робочі камери випускного відділення машини і переміщують їх уздовж осі Ζ рухом їх контактних ділянок сполучення. Механізм набору 3 є реверсивним. Ступінь розширення робочої субстанції в наборі 3 заданий геометричними параметрами спряжених елементів і кількістю ступенів розширення. Для цілей даного винаходу його можна вибрати так, щоб забезпечити повне розширення робочої субстанції, знижуючи при цьому її тиск до атмосферного тиску. Таким чином, не виробляється жодного акустичного шуму. В цьому випадку механічна енергія, що забезпечується робочою субстанцією, повністю використовується для обертання валу 4. В деяких інших випадках, зокрема, при водінні транспортного засобу з падаючою моментною характеристикою, корисно використовувати тільки деяку частину механічної енергії в наборі 3, і використовувати частину механічної енергії, що залишилася, в додатковій машині 33 розширення об'ємного типу (детандері, подібному детандеру 3), яка проілюстрована пунктирною лінією на Фіг.1. її вал 34 (також показаний за допомогою пунктирних ліній на Фіг.1) не має механічного з'єднання з валом 4. Механічну енергію обертання знімають з вихідного валу 34 додаткової машини 33 по схемі двигуна з двома валами. В іншому альтернативному варіанті можна використовувати струменеве виштовхування продуктів згоряння з вихідного елемента відділення 3 по схемі повітряно-струменевого двигуна, в якому компресор, що використовує спосіб згідно з даним винаходом, утворений відділеннями 1 і 2, і в якому детандер, що використовує спосіб згідно з даним винаходом, утворений відділенням 3 обертальної гвинтової машини об'ємного типа, в якому спалювання палива може відбуватися в камерах 140 набору 2 при постійному об'ємі, підвищуючи, таким чином, зусилля двигуна. Спалювання палива також можна виконувати в зовнішніх камерах згоряння (не показані), які приєднують до камер 140. Крім того, щоб використовувати не тільки механічну енергію робочої субстанції, але також (по 15 вністю) використовувати теплову енергію, можливо забезпечення в спеціальному теплообміннику (який не показаний на Фіг.1) випуску гарячих газів, щоб нагрівати повітря, яке проходить через нього з набору 1 в набір 2 з постійним об'ємом, таким чином підвищуючи його тиск. Отже, згідно з винаходом можна повністю використовувати теплову й механічну енергію робочої субстанції в двигуні й підвищити його ефективність, одночасно забезпечуючи безшумну роботу при тиску й температурі вихлопних газів на атмосферному рівні. Обертання в протилежних напрямках вихідних валів 4 і 5 у відділенні 1, яке задається інверту 86608 16 ванням 11, дозволяє сполучати двигун з пристроями, що обертаються в протилежному напрямку, такими, як повітряні гвинти або гребні гвинти, ріжучі елементи, що обертаються в протилежному напрямку, косарок, пил, дробарок і т.д. З'єднання також може бути здійснено з турбіною, що обертається в протилежному напрямку, або гвинтами літака, і т.д. При використанні об'ємної гвинтової машини цей спосіб дозволяє виконувати синхронне й одночасне перетворення руху спряжених елементів при проходженні робочої субстанції через диференціальний кінематичний механізм у наборі 1. 17 86608 18 19 86608 20 21 Комп’ютерна верстка Л. Купенко 86608 Підписне 22 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for transformation of energy in rotary auger machine of volumetric type
Автори англійськоюGorban Aleksander
Назва патенту російськоюСпособ превращения энергии во вращательной винтовой машине объемного типа
Автори російськоюГорбан Александр (умер)
МПК / Мітки
МПК: F01C 11/00, F01C 1/107
Мітки: спосіб, гвинтовий, машини, перетворення, типу, обертальний, об`ємного, енергії
Код посилання
<a href="https://ua.patents.su/11-86608-sposib-peretvorennya-energi-v-obertalnijj-gvintovijj-mashini-obehmnogo-tipu.html" target="_blank" rel="follow" title="База патентів України">Спосіб перетворення енергії в обертальній гвинтовій машині об’ємного типу</a>
Ротаційна ґвинтова машина об’ємного типу і спосіб перетворення руху в об’ємній ґвинтовій машині
Номер патенту: 83802
Опубліковано: 26.08.2008
Автор: Горбан Алєксандр
МПК: F04C 11/00, F04C 2/107
Мітки: ґвинтова, спосіб, ґвинтовій, машина, руху, об`ємного, об'ємний, ротаційна, машини, перетворення, типу
Формула / Реферат:
1. Ротаційна ґвинтова машина об'ємного типу, яка містить корпус (30), що має основну вісь X, два елементи, що складаються з охоплюваного елемента (10, 110, 500, 600, 700) і елемента, що охоплює (20, 120, 600, 700, 800), який оточує охоплюваний елемент, в якій зовнішня поверхня охоплюваного елемента (10, 110, 500, 600, 700) визначає охоплювану поверхню (12, 112), а внутрішня поверхня елемента, що охоплює, визначає поверхню, що охоплює (22,...
Спосіб перетворення енергії текучого середовища в обертальний рух і пристрій для його здійснення
Номер патенту: 49485
Опубліковано: 16.09.2002
Автор: Келов Довлет Довлетович
МПК: F03D 7/06
Мітки: енергії, перетворення, здійснення, обертальний, середовища, пристрій, рух, спосіб, текучого
Формула / Реферат:
1. Спосіб перетворення енергії текучого середовища в обертальний рух, який заснований на тому, що в текучому середовищі установлюють вісь перпендикулярно напрямку руху потоку цього текучого середовища і на деякій відстані від цієї осі поміщають крило, власну подовжню вісь якого розміщають за допомогою конструктивного елемента паралельно зазначеній осі, при цьому при русі крила під дією гідродинамічних сил по дузі кругової орбіти, зверненої до...
Спосіб перетворення мінних касет типу ксф-1с з протипіхотними мінами типу пфм-1/пфм-1с у продукти утилізації для їх наступної переробки
Номер патенту: 5933
Опубліковано: 15.03.2005
Автори: Щербань Володимир Валентинович, Юдицький Олексій Володимирович, Зима Олександр Васильович, Авдєєв Григорій Григорович, Жуковський Сергій Михайлович, Саприкін Андрій Борисович, Лаврук Анатолій Зінов'євич, Шкурат Федір Михайлович, Ковальський Вадим Миколайович, Дарькін Костянтин Миколайович, Малашенко Анатолій Євдокимович, Сетало Сергій Володимирович, Кривонос Володимир Миколайович
МПК: F42B 33/06, F42D 5/04
Мітки: переробки, протипіхотними, типу, касет, перетворення, продукти, ксф-1с, наступної, утилізації, спосіб, мінних, мінами
Формула / Реферат:
Спосіб перетворення мінних касет типу КСФ-1С з протипіхотними мінами типу ПФМ-1/ПФМ-1С у продукти утилізації для їх наступної переробки, при якому підготовлюють площадку, відривають на площадці котлован, після проведення вищевказаних підготовчих операцій одержують мінні касети типу КСФ-1С, що знаходяться в упакуванні, розпаковують зазначені мінні касети, розміщують мінні касети типу КСФ-1С в котловані, забезпечують спрацьовування...
Спосіб перетворення енергії гравітаційного поля в механічну енергію обертання
Номер патенту: 64430
Опубліковано: 16.02.2004
Автори: Заїка Юрій Володимирович, Савченко Борис Степанович
МПК: F03G 7/06
Мітки: перетворення, механічну, енергію, обертання, спосіб, поля, гравітаційного, енергії
Формула / Реферат:
Спосіб перетворення енергії гравітаційного поля в механічну енергію обертання, що включає використання енергії, обертання в вакуумному середовищі ротора і робочого тіла в умовах дії відцентрової сили, спрямування робочого тіла окремими потоками від осі обертання, який відрізняється тим, що в розріджене середовище, наповнене робочим тілом, встановлюють ротор з радіальним отвором і виконавчими соплами, початкову енергію ротору надають пусковим...
Спосіб перетворення енергії гравітаційного поля в механічну енергію обертання
Номер патенту: 16995
Опубліковано: 15.09.2006
Автори: Заїка Юрій Володимирович, Савченко Борис Степанович
МПК: F03G 7/00
Мітки: перетворення, обертання, поля, спосіб, механічну, енергії, гравітаційного, енергію
Формула / Реферат:
1. Спосіб перетворення енергії гравітаційного поля в механічну енергію обертання, що включає встановлення ротора в розріджене середовище, наповнене робочим тілом, обертання в розрідженому середовищі ротора і робочого тіла в умовах дії відцентрової сили, спрямування робочого тіла окремими потоками від осі обертання, викидання робочого тіла на турбіну, перетворення кінетичної енергії робочого тіла в механічну енергію обертання турбіни,...
Наступний патент: Антипаразитарна суміш для місцевого нанесення та спосіб забезпечення антипаразитарної активності
Випадковий патент: Спосіб формування панкреатоєюноанастомозу