Спосіб і пристрій для ультразвукового вимірювання пружності та в’язкості біологічних тканин в реальному часі
Формула / Реферат
1. Спосіб ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі, що включає задання площини сканування, множини напрямків зондування в площині сканування, випромінювання принаймні одного потужного сфокусованого ультразвукового пучка у напрямку, що співпадає з напрямками зондування, подальше випромінювання вздовж напрямків зондування періодичної послідовності зондуючих ультразвукових імпульсів, безперервний прийом ультразвукових хвиль, що виникають при відбитті кожного з імпульсів, перетворення відбитих хвиль в електричні сигнали відгуку, їх підсилення, дискретизацію, оцінку за допомогою електричних сигналів відгуку переміщення тканин у вимірювальних об'ємах вибраної множини напрямків зондування, визначення комплексних спектральних складових переміщень тканин, оцінку швидкості розповсюдження зсувних хвиль при їх проходженні через вимірювальні об'єми вибраної множини напрямків зондування, оцінку модуля зсуву та зсувної в'язкості та візуалізацію просторового розподілу цих величин в реальному часі, який відрізняється тим, що додатково визначають спектральні характеристики перших часових та перших просторових похідних переміщень біологічних тканин, за якими обчислюють швидкість розповсюдження зсувних хвиль та модуль зсуву з урахуванням впливу зсувної в'язкості тканин, яку також обчислюють за допомогою спектральних складових перших часових та просторових похідних.
2. Пристрій для ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі, що містить послідовно з'єднані передавач, ультразвуковий перетворювач, приймач, обчислювач переміщення тканин у вимірювальних об'ємах вибраної множини напрямків зондування та спектральний аналізатор, а також послідовно з'єднані обчислювач модуля зсуву та зсувної в'язкості, блок накопичення та усереднення даних та пристрій для відображення інформації, який відрізняється тим, що в нього додатково введені обчислювач спектральних складових перших часових похідних та обчислювач спектральних складових перших просторових похідних переміщень, входи яких підключені до виходу спектрального аналізаторa, а виходи з'єднані зі входами обчислювача модуля зсуву та зсувної в'язкості.
Текст
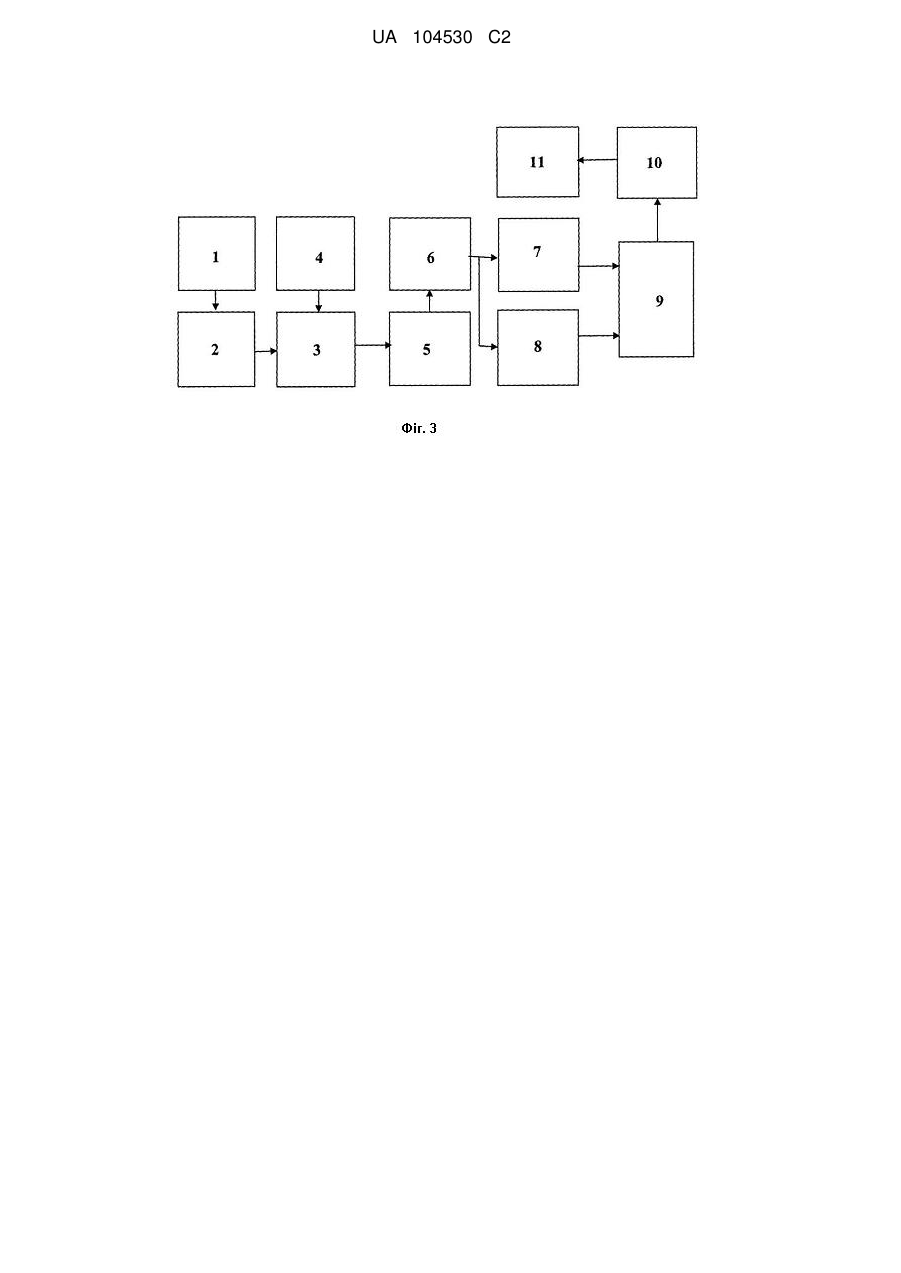
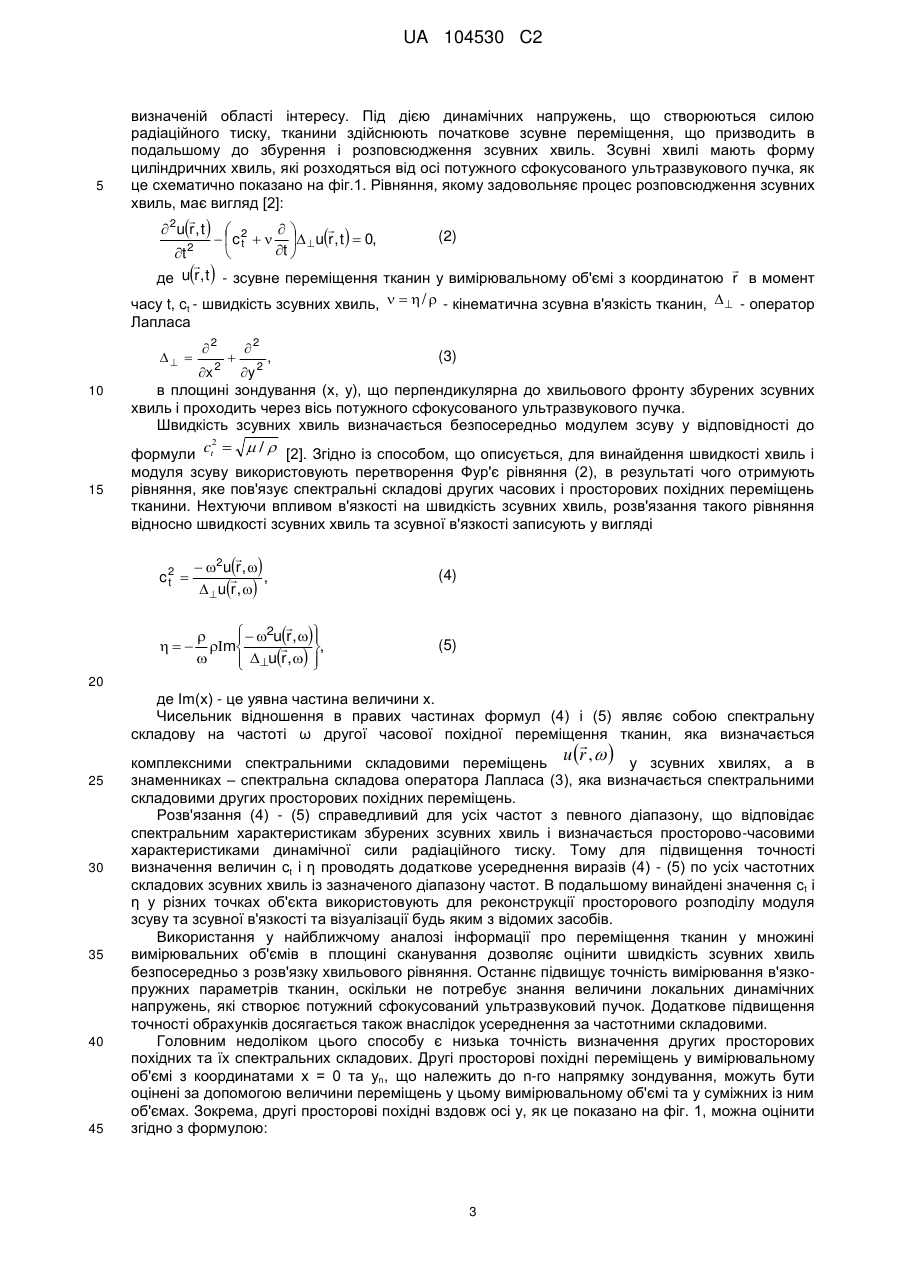
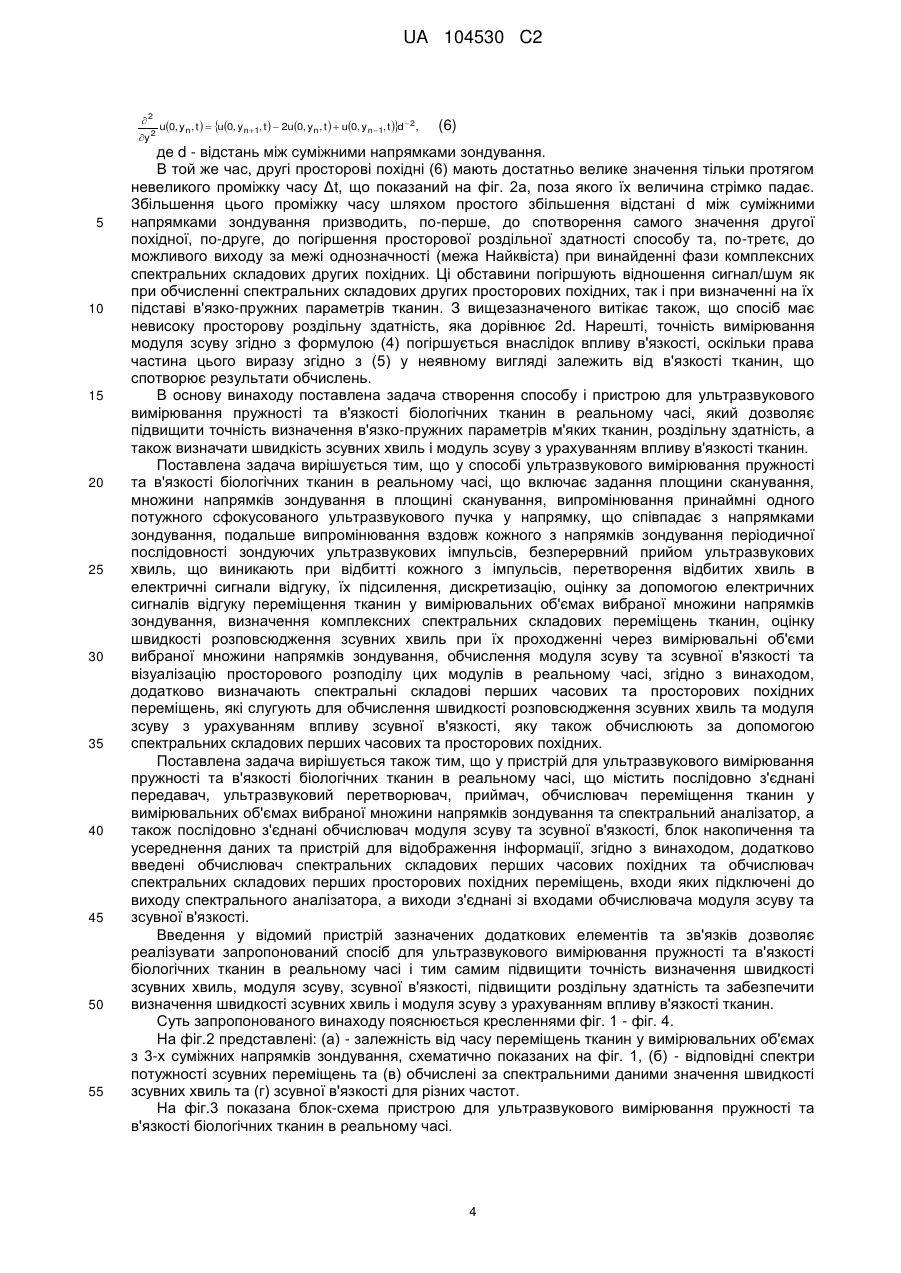
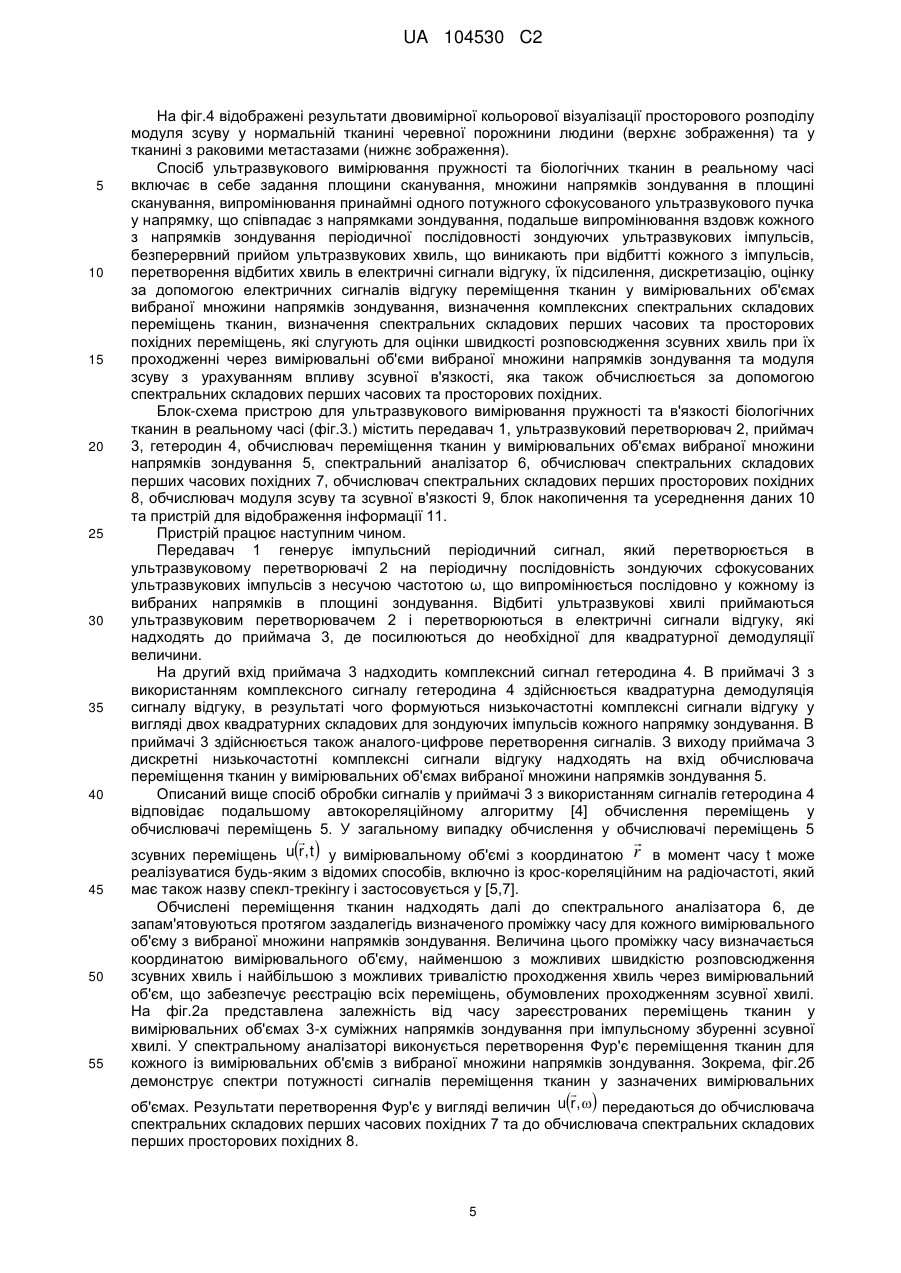
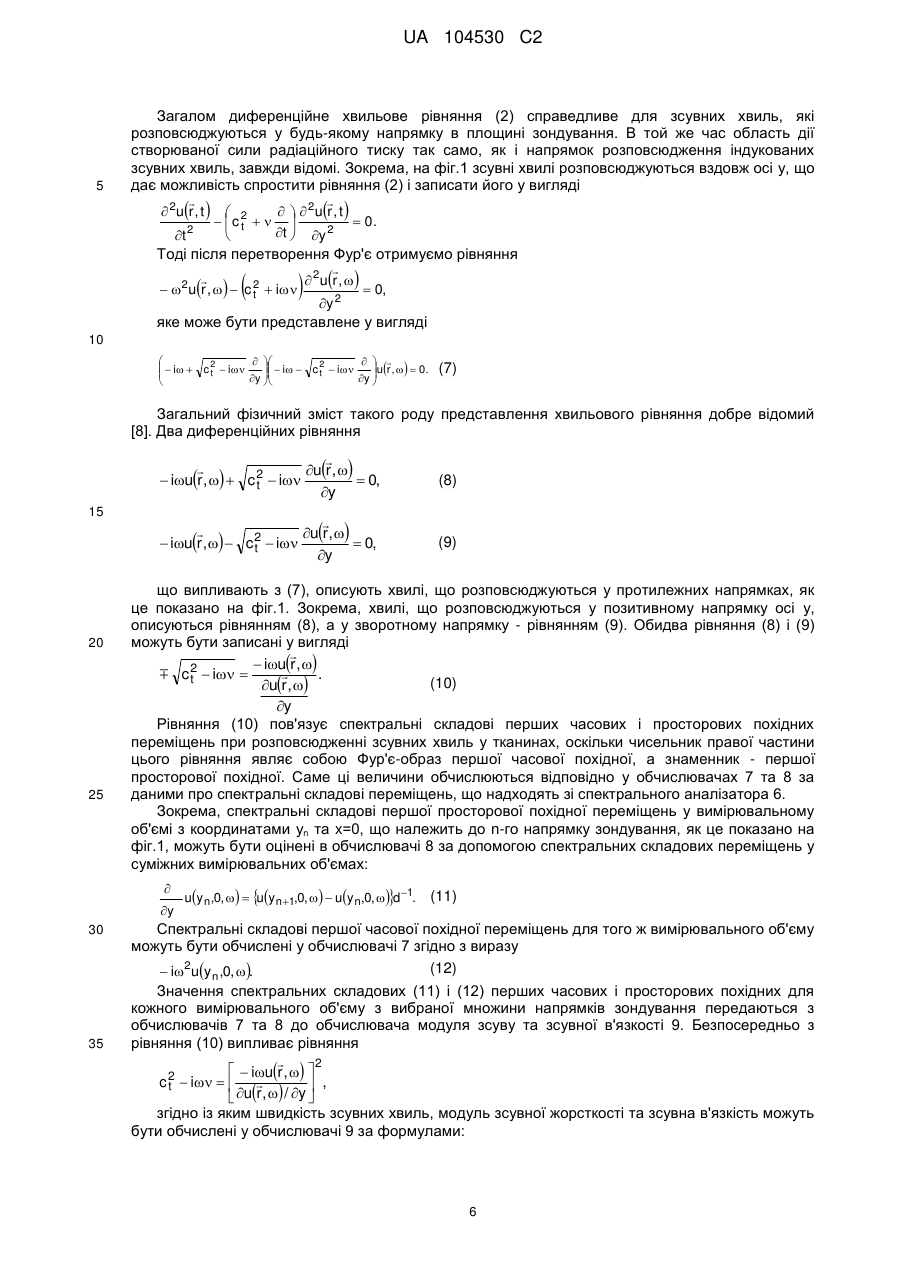
Реферат: Спосіб та пристрій для ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі належать до ультразвукових систем і способів медичної діагностики. Для реалізації способу задають множину напрямків зондування в площині сканування, випромінюють потужний сфокусований ультразвуковий пучок та оцінюють модуль зсуву та зсувну в'язкість біологічних тканин за спектральними характеристиками перших часових і просторових похідних переміщень у зсувній хвилі. Відображення результатів здійснюють у вигляді оцінки середнього значення модуля зсуву та в'язкості у даному вимірювальному об'ємі та/або у вигляді просторового розподілу модуля зсуву або в'язкості у вимірювальних об'ємах в площині зондування. Пристрій для здійснення способу містить послідовно з'єднані передавач, ультразвуковий перетворювач, приймач, обчислювач переміщення тканин у вимірювальних об'ємах вибраної множини напрямків зондування та спектральний аналізатор, а також послідовно з'єднані обчислювач модуля зсуву та зсувної в'язкості, блок накопичення та усереднення даних та пристрій для відображення інформації. В нього додатково введені обчислювач спектральних складових перших часових похідних та обчислювач спектральних складових перших просторових похідних переміщень. Спосіб та пристрій забезпечують підвищення точності визначення в'язко-пружних параметрів м’яких тканин. UA 104530 C2 (12) UA 104530 C2 UA 104530 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до ультразвукових систем і способів медичної діагностики, що використовують ультразвукове зондування для визначення в реальному часі в'язко-пружних властивостей біологічних тканин, зокрема до способів ультразвукової візуалізації просторового розподілу у біологічному об'єкті модуля зсуву та зсувної в'язкості і визначення на цій основі областей із патологічно зміненими тканинами. В усіх відомих способах і пристроях для отримання інформації щодо локальних властивостей біологічного об'єкта за допомогою імпульсного ультразвукового зондування загальним є те, що шляхом дискретизації електричного сигналу відгуку, отриманого з відбитих ультразвукових хвиль, вибирають деяку множину локальних областей досліджуваного об'єкта, що знаходяться на визначеній вздовж напрямку зондування глибині [1]. Величина кожної області, що називається вимірювальним об'ємом, визначається тривалістю зондуючих ультразвукових імпульсів та ступенем фокусування пучків хвиль, що випромінюються та приймаються. При зондуванні будь-яких суцільних середовищ ультразвукові сигнали відгуку мають форму синусоїди з несучою радіочастотою та амплітудно-фазовою модуляцією. Амплітудна складова сигналів відгуку залежить від відбивної здатності середовища у кожному з вимірювальних об'ємів, яка визначається локальною величиною модуля просторової стисливості К середовища та її густиною ρ. За даними про величину амплітуди сигналів відгуку обраховують просторову стисливість середовища та її густину у кожному з вимірювальних об'ємів та реконструюють просторовий розподіл цих параметрів, що дає можливість візуалізувати внутрішню структуру об'єкта. Суцільні середовища характеризуються двома пружними модулями [2] - модулем просторової стисливості К та модулем зсуву μ, який у м'яких тканинах визначає також модуль Юнга Ε 3μ. Від зсувних характеристик середовища амплітуда відбитих ультразвукових хвиль не залежить так само, як і від модуля зсувної в'язкості η, тому за допомогою звичайних ультразвукових способів і пристроїв неможливо визначити величину модулів μ і η. Ця обставина унеможливлює візуалізацію низки патологічних станів біологічних тканин, оскільки у багатьох випадках саме модуль зсуву та модуль Юнга найбільш сильно змінюють свою величину в тканинах, де мають місце патологічні процеси. Модуль Юнга може бути визначений за даними про локальні переміщення тканин в результаті деформації вільного розтягнення або стискання під дією певного навантаження [2]. В техніці вимірювання переміщень і параметрів руху біологічних об'єктів найбільш інформативною є фазова складова сигналів відгуку [3-4]. Для вимірювання в реальному часі малих за амплітудою рухів і вібрацій тканин використовують, зокрема, способи і ультразвукові діагностичні пристрої, що побудовані на так званому автокореляційному способі обчислень [4]. Відповідно із цим способом здійснюють задання напрямку зондування, періодичне випромінювання вздовж цього напрямку послідовності зондуючих ультразвукових імпульсів, безперервний прийом ультразвукових хвиль, що виникають при відбиттях кожного з імпульсів, перетворення відбитих хвиль в електричні сигнали відгуку, їх підсилення, дискретизацію, квадратурну демодуляцію з виділенням низькочастотного комплексного сигналу відгуку, обчислення автокореляційної функції для послідовності дискретних значень допплерівських сигналів відгуку, що формується послідовністю імпульсів зондування, визначення різниці фаз сигналів відгуку від суміжних імпульсів зондування та обчислення за зазначеною різницею фаз переміщення і швидкості руху відбивачів ультразвуку вздовж напрямку зондування. З точки зору вимірювання модуля зсуву та модуля Юнга головним недоліком усіх способів вимірювання локальних переміщень є те, що само по собі вимірювання переміщень тканин внаслідок деформацій не дає можливості навіть якісно оцінити модуль зсуву внаслідок невизначеності діючих локальних напружень, що зініціювали ці рухи. Відомі спосіб і пристрій для винайдення просторового розподілу модуля зсуву, що поєднують імпульсне ультразвукове зондування із одночасним створенням визначених зовнішніх статичних навантажень на біологічний об'єкт [5]. Запропонований спосіб включає в себе створення наперед визначених зовнішніх статичних напружень на поверхні об'єкта дослідження, задання напрямку зондування, який співпадає із напрямом дії напружень, періодичне випромінювання вздовж напрямку зондування послідовності зондуючих ультразвукових імпульсів, безперервний прийом ультразвукових хвиль, що виникають при відбиттях кожного з імпульсів, перетворення відбитих хвиль в електричні сигнали відгуку, їх підсилення, дискретизацію, обчислення крос-кореляційної функції сигналів відгуку від суміжних імпульсів зондування для множини наперед визначених вимірювальних об'ємів, визначення часового зсуву між сигналами відгуку згідно із положенням максимуму крос-кореляційної функції, обчислення за цими даними переміщень відбивачів ультразвуку в кожному з 1 UA 104530 C2 5 10 15 20 25 30 35 40 45 50 55 вимірювальних об'ємів, винайдення за величиною переміщень величини відносної деформації та обрахування модуля зсуву за даними про величину відносної деформації та зовнішнього напруження. Згідно із описаним вище способом модуль Юнга знаходиться за формулою [2] p (1) , де p - напруження на поверхні об'єкта, ur1 ur2 / l12 - відносна деформація, яка визначається переміщеннями ur1 і ur2 тканини у двох вимірювальних об'ємах, що l r1 r2 відрізняються координатою вздовж напрямку зондування, і відстанню між ними 12 до появи напруження. Модуль Юнга (1) відповідає середньому значенню цього параметра для ділянки тканини між вимірювальними об'ємами. Напруження у описаному способі може створюватись на поверхні біологічного об'єкта за допомогою того самого ультразвукового перетворювача, який здійснює ультразвукове зондування. Недоліком цього способу є низька точність вимірювань, оскільки в реальних умовах неможливо створити у біологічних об'єктах, які зазвичай мають складну геометрію, деформацію вільного розтягнення або стискання, для якої справедлива формула (1). Внаслідок цього дійсні локальні напруження у тканинах можуть суттєво відрізнятися від поверхневих навіть у випадку, коли останні точно визначені. Відомі спосіб і пристрій винайдення просторового розподілу модуля зсуву, що поєднують імпульсне ультразвукове зондування із одночасним створенням зовнішніх динамічних вібраційних напружень [6]. Спосіб включає в себе створення зовнішніх вібраційних напружень на поверхні об'єкта дослідження, задання напрямку зондування, який співпадає із напрямом дії вібраційних напружень, періодичне випромінювання вздовж напрямку зондування послідовності зондуючих ультразвукових імпульсів, безперервний прийом ультразвукових хвиль, що виникають при відбиттях кожного з імпульсів, перетворення відбитих хвиль в електричні сигнали відгуку, їх підсилення, дискретизацію, квадратурну демодуляцію з виділенням низькочастотного комплексного сигналу відгуку, обчислення автокореляційної функції для послідовності дискретних значень допплерівських сигналів відгуку, що формуються послідовністю імпульсів зондування, визначення різниці фаз сигналів відгуку, що формуються одним і тим же вимірювальним об'ємом від суміжних імпульсів зондування, обчислення за зазначеною різницею фаз вібраційних переміщень тканин і швидкостей руху в напрямку зондування. До переваг цього способу належить те, що обчислювальна трудомісткість автокореляційного способу у порівнянні з кросс-кореляційним на радіочастоті зменшується завдяки тому, що частота дискретизації низькочастотного комплексного сигналу відгуку може бути суттєво меншою. Саме цей метод обчислень використовується зазвичай в ультразвуковій медичній діагностиці для відображення потоків крові у реальному часі. Недоліком методу є необхідність застосування додаткових механічних вібраторів, що ускладнює процедуру обстеження. Головним же недоліком цього методу є те, що він також є по суті якісним внаслідок невизначеності локальних напружень. Найбільш близьким за технічним рішенням до способу і пристрою, що пропонуються, є спосіб і пристрій ультразвукового вимірювання ї візуалізації просторового розподілу в'язкопружних властивостей біологічних тканин в реальному часі за допомогою зсувних хвиль, що збурюються безпосередньо в об'єкті дослідження [7]. Спосіб включає в себе задання площини сканування, множини напрямків зондування в площині сканування, випромінювання принаймні одного потужного сфокусованого ультразвукового пучка хвиль у напрямку, що співпадає з напрямками зондування, подальше випромінювання вздовж кожного з напрямків зондування періодичної послідовності зондуючих ультразвукових імпульсів, безперервний прийом ультразвукових хвиль, що виникають при відбиттях кожного з імпульсів, перетворення відбитих хвиль в електричні сигнали відгуку, їх підсилення, дискретизацію, оцінку за допомогою електричних сигналів відгуку переміщення тканин у вимірювальних об'ємах вибраної множини напрямків зондування, винайдення комплексних спектральних складових переміщень тканин, визначення на цій основі спектральних складових других часових та просторових похідних переміщень, оцінку за їх допомогою швидкості розповсюдження зсувних хвиль при їх проходженні через вимірювальні об'єми вибраної множини напрямків зондування, обчислення модуля зсуву та зсувної в'язкості та візуалізацію просторового розподілу цих модулів в реальному часі. В описаному способі випромінювання принаймні одного потужного сфокусованого ультразвукового пучка необхідне для створення сили радіаційного тиску на тканини у 2 UA 104530 C2 5 визначеній області інтересу. Під дією динамічних напружень, що створюються силою радіаційного тиску, тканини здійснюють початкове зсувне переміщення, що призводить в подальшому до збурення і розповсюдження зсувних хвиль. Зсувні хвилі мають форму циліндричних хвиль, які розходяться від осі потужного сфокусованого ультразвукового пучка, як це схематично показано на фіг.1. Рівняння, якому задовольняє процес розповсюдження зсувних хвиль, має вигляд [2]: 2ur , t 2 (2) c t ur , t 0, 2 t t де ur , t - зсувне переміщення тканин у вимірювальному об'ємі з координатою r в момент часу t, ct - швидкість зсувних хвиль, / - кінематична зсувна в'язкість тканин, - оператор Лапласа 10 2 2 (3) , x 2 y 2 в площині зондування (х, у), що перпендикулярна до хвильового фронту збурених зсувних хвиль і проходить через вісь потужного сфокусованого ультразвукового пучка. Швидкість зсувних хвиль визначається безпосередньо модулем зсуву у відповідності до формули ct / [2]. Згідно із способом, що описується, для винайдення швидкості хвиль і модуля зсуву використовують перетворення Фур'є рівняння (2), в результаті чого отримують рівняння, яке пов'язує спектральні складові других часових і просторових похідних переміщень тканини. Нехтуючи впливом в'язкості на швидкість зсувних хвиль, розв'язання такого рівняння відносно швидкості зсувних хвиль та зсувної в'язкості записують у вигляді 2 15 c2 t 2ur , , ur , 2ur , m , ur , (4) (5) 20 де Im(x) - це уявна частина величини x. Чисельник відношення в правих частинах формул (4) і (5) являє собою спектральну складову на частоті ω другої часової похідної переміщення тканин, яка визначається u r , у зсувних хвилях, а в комплексними спектральними складовими переміщень 25 30 35 40 45 знаменниках – спектральна складова оператора Лапласа (3), яка визначається спектральними складовими других просторових похідних переміщень. Розв'язання (4) - (5) справедливий для усіх частот з певного діапазону, що відповідає спектральним характеристикам збурених зсувних хвиль і визначається просторово-часовими характеристиками динамічної сили радіаційного тиску. Тому для підвищення точності визначення величин ct і η проводять додаткове усереднення виразів (4) - (5) по усіх частотних складових зсувних хвиль із зазначеного діапазону частот. В подальшому винайдені значення ct і η у різних точках об'єкта використовують для реконструкції просторового розподілу модуля зсуву та зсувної в'язкості та візуалізації будь яким з відомих засобів. Використання у найближчому аналозі інформації про переміщення тканин у множині вимірювальних об'ємів в площині сканування дозволяє оцінити швидкість зсувних хвиль безпосередньо з розв'язку хвильового рівняння. Останнє підвищує точність вимірювання в'язкопружних параметрів тканин, оскільки не потребує знання величини локальних динамічних напружень, які створює потужний сфокусований ультразвуковий пучок. Додаткове підвищення точності обрахунків досягається також внаслідок усереднення за частотними складовими. Головним недоліком цього способу є низька точність визначення других просторових похідних та їх спектральних складових. Другі просторові похідні переміщень у вимірювальному об'ємі з координатами х = 0 та уn, що належить до n-го напрямку зондування, можуть бути оцінені за допомогою величини переміщень у цьому вимірювальному об'ємі та у суміжних із ним об'ємах. Зокрема, другі просторові похідні вздовж осі у, як це показано на фіг. 1, можна оцінити згідно з формулою: 3 UA 104530 C2 2 y 2 5 10 15 20 25 30 35 40 45 50 55 u0, y n , t u0, y n 1, t 2u0, y n , t u0, y n 1, t d 2 , (6) де d - відстань між суміжними напрямками зондування. В той же час, другі просторові похідні (6) мають достатньо велике значення тільки протягом невеликого проміжку часу Δt, що показаний на фіг. 2а, поза якого їх величина стрімко падає. Збільшення цього проміжку часу шляхом простого збільшення відстані d між суміжними напрямками зондування призводить, по-перше, до спотворення самого значення другої похідної, по-друге, до погіршення просторової роздільної здатності способу та, по-третє, до можливого виходу за межі однозначності (межа Найквіста) при винайденні фази комплексних спектральних складових других похідних. Ці обставини погіршують відношення сигнал/шум як при обчисленні спектральних складових других просторових похідних, так і при визначенні на їх підставі в'язко-пружних параметрів тканин. З вищезазначеного витікає також, що спосіб має невисоку просторову роздільну здатність, яка дорівнює 2d. Нарешті, точність вимірювання модуля зсуву згідно з формулою (4) погіршується внаслідок впливу в'язкості, оскільки права частина цього виразу згідно з (5) у неявному вигляді залежить від в'язкості тканин, що спотворює результати обчислень. В основу винаходу поставлена задача створення способу і пристрою для ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі, який дозволяє підвищити точність визначення в'язко-пружних параметрів м'яких тканин, роздільну здатність, а також визначати швидкість зсувних хвиль і модуль зсуву з урахуванням впливу в'язкості тканин. Поставлена задача вирішується тим, що у способі ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі, що включає задання площини сканування, множини напрямків зондування в площині сканування, випромінювання принаймні одного потужного сфокусованого ультразвукового пучка у напрямку, що співпадає з напрямками зондування, подальше випромінювання вздовж кожного з напрямків зондування періодичної послідовності зондуючих ультразвукових імпульсів, безперервний прийом ультразвукових хвиль, що виникають при відбитті кожного з імпульсів, перетворення відбитих хвиль в електричні сигнали відгуку, їх підсилення, дискретизацію, оцінку за допомогою електричних сигналів відгуку переміщення тканин у вимірювальних об'ємах вибраної множини напрямків зондування, визначення комплексних спектральних складових переміщень тканин, оцінку швидкості розповсюдження зсувних хвиль при їх проходженні через вимірювальні об'єми вибраної множини напрямків зондування, обчислення модуля зсуву та зсувної в'язкості та візуалізацію просторового розподілу цих модулів в реальному часі, згідно з винаходом, додатково визначають спектральні складові перших часових та просторових похідних переміщень, які слугують для обчислення швидкості розповсюдження зсувних хвиль та модуля зсуву з урахуванням впливу зсувної в'язкості, яку також обчислюють за допомогою спектральних складових перших часових та просторових похідних. Поставлена задача вирішується також тим, що у пристрій для ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі, що містить послідовно з'єднані передавач, ультразвуковий перетворювач, приймач, обчислювач переміщення тканин у вимірювальних об'ємах вибраної множини напрямків зондування та спектральний аналізатор, а також послідовно з'єднані обчислювач модуля зсуву та зсувної в'язкості, блок накопичення та усереднення даних та пристрій для відображення інформації, згідно з винаходом, додатково введені обчислювач спектральних складових перших часових похідних та обчислювач спектральних складових перших просторових похідних переміщень, входи яких підключені до виходу спектрального аналізатора, а виходи з'єднані зі входами обчислювача модуля зсуву та зсувної в'язкості. Введення у відомий пристрій зазначених додаткових елементів та зв'язків дозволяє реалізувати запропонований спосіб для ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі і тим самим підвищити точність визначення швидкості зсувних хвиль, модуля зсуву, зсувної в'язкості, підвищити роздільну здатність та забезпечити визначення швидкості зсувних хвиль і модуля зсуву з урахуванням впливу в'язкості тканин. Суть запропонованого винаходу пояснюється кресленнями фіг. 1 - фіг. 4. На фіг.2 представлені: (а) - залежність від часу переміщень тканин у вимірювальних об'ємах з 3-х суміжних напрямків зондування, схематично показаних на фіг. 1, (б) - відповідні спектри потужності зсувних переміщень та (в) обчислені за спектральними даними значення швидкості зсувних хвиль та (г) зсувної в'язкості для різних частот. На фіг.3 показана блок-схема пристрою для ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі. 4 UA 104530 C2 5 10 15 20 25 30 35 40 45 50 55 На фіг.4 відображені результати двовимірної кольорової візуалізації просторового розподілу модуля зсуву у нормальній тканині черевної порожнини людини (верхнє зображення) та у тканині з раковими метастазами (нижнє зображення). Спосіб ультразвукового вимірювання пружності та біологічних тканин в реальному часі включає в себе задання площини сканування, множини напрямків зондування в площині сканування, випромінювання принаймні одного потужного сфокусованого ультразвукового пучка у напрямку, що співпадає з напрямками зондування, подальше випромінювання вздовж кожного з напрямків зондування періодичної послідовності зондуючих ультразвукових імпульсів, безперервний прийом ультразвукових хвиль, що виникають при відбитті кожного з імпульсів, перетворення відбитих хвиль в електричні сигнали відгуку, їх підсилення, дискретизацію, оцінку за допомогою електричних сигналів відгуку переміщення тканин у вимірювальних об'ємах вибраної множини напрямків зондування, визначення комплексних спектральних складових переміщень тканин, визначення спектральних складових перших часових та просторових похідних переміщень, які слугують для оцінки швидкості розповсюдження зсувних хвиль при їх проходженні через вимірювальні об'єми вибраної множини напрямків зондування та модуля зсуву з урахуванням впливу зсувної в'язкості, яка також обчислюється за допомогою спектральних складових перших часових та просторових похідних. Блок-схема пристрою для ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі (фіг.3.) містить передавач 1, ультразвуковий перетворювач 2, приймач 3, гетеродин 4, обчислювач переміщення тканин у вимірювальних об'ємах вибраної множини напрямків зондування 5, спектральний аналізатор 6, обчислювач спектральних складових перших часових похідних 7, обчислювач спектральних складових перших просторових похідних 8, обчислювач модуля зсуву та зсувної в'язкості 9, блок накопичення та усереднення даних 10 та пристрій для відображення інформації 11. Пристрій працює наступним чином. Передавач 1 генерує імпульсний періодичний сигнал, який перетворюється в ультразвуковому перетворювачі 2 на періодичну послідовність зондуючих сфокусованих ультразвукових імпульсів з несучою частотою ω, що випромінюється послідовно у кожному із вибраних напрямків в площині зондування. Відбиті ультразвукові хвилі приймаються ультразвуковим перетворювачем 2 і перетворюються в електричні сигнали відгуку, які надходять до приймача 3, де посилюються до необхідної для квадратурної демодуляції величини. На другий вхід приймача 3 надходить комплексний сигнал гетеродина 4. В приймачі 3 з використанням комплексного сигналу гетеродина 4 здійснюється квадратурна демодуляція сигналу відгуку, в результаті чого формуються низькочастотні комплексні сигнали відгуку у вигляді двох квадратурних складових для зондуючих імпульсів кожного напрямку зондування. В приймачі 3 здійснюється також аналого-цифрове перетворення сигналів. З виходу приймача 3 дискретні низькочастотні комплексні сигнали відгуку надходять на вхід обчислювача переміщення тканин у вимірювальних об'ємах вибраної множини напрямків зондування 5. Описаний вище спосіб обробки сигналів у приймачі 3 з використанням сигналів гетеродина 4 відповідає подальшому автокореляційному алгоритму [4] обчислення переміщень у обчислювачі переміщень 5. У загальному випадку обчислення у обчислювачі переміщень 5 зсувних переміщень ur , t у вимірювальному об'ємі з координатою r в момент часу t може реалізуватися будь-яким з відомих способів, включно із крос-кореляційним на радіочастоті, який має також назву спекл-трекінгу і застосовується у [5,7]. Обчислені переміщення тканин надходять далі до спектрального аналізатора 6, де запам'ятовуються протягом заздалегідь визначеного проміжку часу для кожного вимірювального об'єму з вибраної множини напрямків зондування. Величина цього проміжку часу визначається координатою вимірювального об'єму, найменшою з можливих швидкістю розповсюдження зсувних хвиль і найбільшою з можливих тривалістю проходження хвиль через вимірювальний об'єм, що забезпечує реєстрацію всіх переміщень, обумовлених проходженням зсувної хвилі. На фіг.2а представлена залежність від часу зареєстрованих переміщень тканин у вимірювальних об'ємах 3-х суміжних напрямків зондування при імпульсному збуренні зсувної хвилі. У спектральному аналізаторі виконується перетворення Фур'є переміщення тканин для кожного із вимірювальних об'ємів з вибраної множини напрямків зондування. Зокрема, фіг.2б демонструє спектри потужності сигналів переміщення тканин у зазначених вимірювальних об'ємах. Результати перетворення Фур'є у вигляді величин ur , передаються до обчислювача спектральних складових перших часових похідних 7 та до обчислювача спектральних складових перших просторових похідних 8. 5 UA 104530 C2 5 Загалом диференційне хвильове рівняння (2) справедливе для зсувних хвиль, які розповсюджуються у будь-якому напрямку в площині зондування. В той же час область дії створюваної сили радіаційного тиску так само, як і напрямок розповсюдження індукованих зсувних хвиль, завжди відомі. Зокрема, на фіг.1 зсувні хвилі розповсюджуються вздовж осі у, що дає можливість спростити рівняння (2) і записати його у вигляді 2ur , t 2 2ur , t ct 0. t y 2 t 2 Тоді після перетворення Фур'є отримуємо рівняння 2ur , 2ur , c 2 i 0, t y 2 яке може бути представлене у вигляді 10 i c 2 i i c 2 i ur , 0. t t y y (7) Загальний фізичний зміст такого роду представлення хвильового рівняння добре відомий [8]. Два диференційних рівняння ur , 2 iur , c t i 0, y 15 20 25 (8) ur , iur , c 2 i 0, t y (9) що випливають з (7), описують хвилі, що розповсюджуються у протилежних напрямках, як це показано на фіг.1. Зокрема, хвилі, що розповсюджуються у позитивному напрямку осі у, описуються рівнянням (8), а у зворотному напрямку - рівнянням (9). Обидва рівняння (8) і (9) можуть бути записані у вигляді iur , 2 c t i . (10) ur , y Рівняння (10) пов'язує спектральні складові перших часових і просторових похідних переміщень при розповсюдженні зсувних хвиль у тканинах, оскільки чисельник правої частини цього рівняння являє собою Фур'є-образ першої часової похідної, а знаменник - першої просторової похідної. Саме ці величини обчислюються відповідно у обчислювачах 7 та 8 за даними про спектральні складові переміщень, що надходять зі спектрального аналізатора 6. Зокрема, спектральні складові першої просторової похідної переміщень у вимірювальному об'ємі з координатами уn та x=0, що належить до n-го напрямку зондування, як це показано на фіг.1, можуть бути оцінені в обчислювачі 8 за допомогою спектральних складових переміщень у суміжних вимірювальних об'ємах: y 30 35 uy n ,0, uy n 1,0, uy n ,0, d1. (11) Спектральні складові першої часової похідної переміщень для того ж вимірювального об'єму можуть бути обчислені у обчислювачі 7 згідно з виразу (12) i2uy n ,0, . Значення спектральних складових (11) і (12) перших часових і просторових похідних для кожного вимірювального об'єму з вибраної множини напрямків зондування передаються з обчислювачів 7 та 8 до обчислювача модуля зсуву та зсувної в'язкості 9. Безпосередньо з рівняння (10) випливає рівняння 2 iur , c 2 i t , ur , / y згідно із яким швидкість зсувних хвиль, модуль зсувної жорсткості та зсувна в'язкість можуть бути обчислені у обчислювачі 9 за формулами: 6 UA 104530 C2 iu, 2 r c t Re ur , / y , (13) iu, 2 r Re ur , / y (14) , 2 iur , m ur , / y , 5 (15) де Re(х)- це дійсна частина величини х. У випадку, коли заздалегідь відомо, що впливом в'язкості можна знехтувати, швидкість зсувних хвиль та модуль зсуву можуть бути оцінені відповідно до виразів 2 iur , iur , ct , . ur , / y ur , / y Перші просторові похідні 10 15 20 25 30 35 40 uy n ,0, t uy n 1,0, t uy n ,0, t d1 y мають, як показано на фіг.2а, достатньо велике значення протягом усього проміжку часу поза невеликим інтервалом Δt. Ця обставина поліпшує відношення сигнал/шум при визначенні спектральних складових (11), внаслідок чого підвищується і точність визначення в'язко-пружних параметрів тканин. Для оцінки величини перших просторових похідних необхідна інформація про переміщення тканин тільки з 2-х суміжних напрямків зондування, що підвищує просторову роздільну здатність до величини d. Нарешті, на вирази (13) та (14) в'язкість тканин не впливає, оскільки згідно із (15) вона визначається тільки уявною частиною квадрата відношення спектральних складових перших часових та просторових похідних. Ця обставина також підвищує точність визначення пружних властивостей тканин. Значення швидкості зсувних хвиль, модуля зсуву тканин та зсувної в'язкості обчислюються у обчислювачі 9 для кожної частотної складової у даному вимірювальному об'ємі і кожного вимірювального об'єму вибраної множини напрямків зондування. Результат моделювання таких обрахунків за формулами (13) та (15), швидкості хвиль та зсувної в'язкості наведений відповідно на фіг.2в та 2г разом із середньоквадратичною похибкою, яка обмежена червоною та синьою лініями. З виходу обчислювача 9 величини μ та η надходять до блока накопичення і усереднення даних 10. У цьому блоці накопичуються дані для всіх частотних складових у даному вимірювальному об'ємі, за якими проводиться усереднення величин μ та η: iu, 2 r 1 Re d, 1 0 0 ur , / y 2 1 1 iur , m d, 1 0 0 ur , / y де величини ω0 та ω1 задають інтервал усереднення за частотою. У блоці 10 ці усереднені значення накопичуються для кожного вимірювального об'єму з вибраної множини напрямків зондування. Нарешті, пристрій відображення інформації 11 реалізує відображення результатів ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі у вигляді оцінки середнього значення модуля зсуву та зсувної в'язкості у заданому вимірювальному об'ємі та/або у вигляді просторового розподілу модуля зсуву або зсувної в'язкості у вимірювальних об'ємах з вибраної множини напрямків зондування, які надходять з блока накопичення та усереднення даних 10. Заявлений спосіб і пристрій для ультразвукового вимірювання пружності та в′язкості біологічних тканин в реальному часі можуть бути реалізовані, наприклад, на цифрових сигнальних процесорах TMS320C6713 фірми Texas Instruments, що підтримують розрахунки з 7 UA 104530 C2 5 10 15 20 25 30 плаваючою точкою і здатні здійснювати усі необхідні обчислення в реальному часі. Сигнальний процесор TMS320C6713 має оперативний запам'ятовуючий пристрій обсягом у 246 кБт, що 4 дозволяє утримувати дані щодо переміщень тканин з більш ніж 3•10 вимірювальних об'ємів. При частоті повторення усього обсягу обчислень у 10 кГц та з урахуванням пікової 8 продуктивності процесора TMS320C6713 у 4•10 операцій в секунду його застосування для реалізації обчислювачів спектральних складових перших часових похідних 7 та перших просторових похідних 8, а також обчислювача модуля зсуву та зсувної в'язкості 9, дозволяє 3 проводити принаймні 10 обчислень в'язко-пружних параметрів тканин, що набагато перевершує вимоги до цих блоків. Вищезазначена частота повторення обрахунків у 10 кГц є більшою за частоту повторення зондуючих імпульсів в усіх режимах ультразвукової медичної діагностики, які практично застосовуються. Приклад застосування заявленого винаходу у онкологічних дослідженнях наведено на фіг.4. Джерела інформації: 1. Применение ультразвука в медицине. Физические основы / Под ред. К. Хилла. -М.: Мир, 1989. - с.346. 2. Ландау Л.Д., Лифшиц Е.М. Теория упругости. - М.: Наука, 1987. -248с. 3. Eckersley RJ, Bamber JC. Methodology for imaging time-dependent phenomena. In: Hill CR, Bamber JC, ter Haar GR, eds. Physical principles of medical ultrasonics. Second ed. - Chichester: John Wiley & Sons, 2004. -P.191-222. 4. Koroku Namekawa, Akira Koyano, Chihiro Kasai, Ultrasonic diagnostic apparatus, United States Patent 4573477, Mar. 4, 1986. Noriyoshi Chubachi, Hiroshi Kanai, Yoshira Koiwa, Ultrasonic diagnostic equipment, United States Patent 5840028, Nov. 24,1998. 5. Jonathan Ophir, Ignacio Cespedes, Method and apparatus for elastographic measurement and imaging, United States Patent 5474070, Dec. 12, 1995. 6. Gregory Sharat Lin, Vibrational Doppler ultrasonic imaging, United States Patent 5919139, Jul. 6,1999. 7. Mathias A. Fink, Mickael Tanter, Imaging method and device employing shear waves, United States Patent 7252004, Aug. 7, 2007. 8. Руденко О.В., Солуян С.И. Теоретические основы нелинейной акустики. -М.: Наука, 1975. - 288с. ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 1. Спосіб ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі, що включає задання площини сканування, множини напрямків зондування в площині сканування, випромінювання принаймні одного потужного сфокусованого ультразвукового пучка у напрямку, що співпадає з напрямками зондування, подальше випромінювання вздовж напрямків зондування періодичної послідовності зондуючих ультразвукових імпульсів, безперервний прийом ультразвукових хвиль, що виникають при відбитті кожного з імпульсів, перетворення відбитих хвиль в електричні сигнали відгуку, їх підсилення, дискретизацію, оцінку за допомогою електричних сигналів відгуку переміщення тканин у вимірювальних об'ємах вибраної множини напрямків зондування, визначення комплексних спектральних складових переміщень тканин, оцінку швидкості розповсюдження зсувних хвиль при їх проходженні через вимірювальні об'єми вибраної множини напрямків зондування, оцінку модуля зсуву та зсувної в'язкості та візуалізацію просторового розподілу цих величин в реальному часі, який відрізняється тим, що додатково визначають спектральні характеристики перших часових та перших просторових похідних переміщень біологічних тканин, за якими обчислюють швидкість розповсюдження зсувних хвиль та модуль зсуву з урахуванням впливу зсувної в'язкості тканин, яку також обчислюють за допомогою спектральних складових перших часових та просторових похідних. 2. Пристрій для ультразвукового вимірювання пружності та в'язкості біологічних тканин в реальному часі, що містить послідовно з'єднані передавач, ультразвуковий перетворювач, приймач, обчислювач переміщення тканин у вимірювальних об'ємах вибраної множини напрямків зондування та спектральний аналізатор, а також послідовно з'єднані обчислювач модуля зсуву та зсувної в'язкості, блок накопичення та усереднення даних та пристрій для відображення інформації, який відрізняється тим, що в нього додатково введені обчислювач спектральних складових перших часових похідних та обчислювач спектральних складових перших просторових похідних переміщень, входи яких підключені до виходу спектрального аналізаторa, а виходи з'єднані зі входами обчислювача модуля зсуву та зсувної в'язкості. 8 UA 104530 C2 9 UA 104530 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори англійськоюLytvynenko Serhii Viktorovych
Автори російськоюЛитвиненко Сергей Викторович
МПК / Мітки
МПК: G01N 29/04, A61B 8/00
Мітки: тканин, часі, спосіб, пружності, в'язкості, біологічних, реальному, вимірювання, пристрій, ультразвукового
Код посилання
<a href="https://ua.patents.su/12-104530-sposib-i-pristrijj-dlya-ultrazvukovogo-vimiryuvannya-pruzhnosti-ta-vyazkosti-biologichnikh-tkanin-v-realnomu-chasi.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для ультразвукового вимірювання пружності та в’язкості біологічних тканин в реальному часі</a>
Спосіб ультразвукового вимірювання пружності біологічних тканин в реальному часі та пристрій для його здійснення
Номер патенту: 100611
Опубліковано: 10.01.2013
Автори: Динник Олег Борисович, Лінська Ганна Володимирівна, МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ, БОЙЧЕНКО ЮРІЙ ПЕТРОВИЧ, Литвиненко Сергій Вікторович, БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ, Пупченко Віктор Іванович
МПК: G01N 29/04, A61B 8/08
Мітки: часі, пристрій, здійснення, спосіб, ультразвукового, пружності, біологічних, тканин, реальному, вимірювання
Формула / Реферат:
1. Спосіб ультразвукового вимірювання пружності біологічних тканин в реальному часі, що включає задання площини сканування, множини напрямків зондування в площині сканування, випромінювання принаймні одного потужного сфокусованого ультразвукових пучка у напрямку, що співпадає з одним із напрямків зондування, подальше періодичне випромінювання вздовж напрямків зондування послідовності зондуючих ультразвукових імпульсів, безперервний прийом...
Спосіб і пристрій для ультразвукового вимірювання змін діаметра кровоносної судини в реальному часі
Номер патенту: 93171
Опубліковано: 10.01.2011
Автори: МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ, БОЙЧЕНКО ЮРІЙ ПЕТРОВИЧ, БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ, Лінська Ганна Володимирівна, Пупченко Віктор Іванович, Лінський Ігор Володимирович
МПК: G01P 5/00, G01S 13/00, A61B 8/00
Мітки: ультразвукового, спосіб, кровоносної, реальному, діаметра, часі, змін, вимірювання, пристрій, судині
Формула / Реферат:
1. Спосіб ультразвукового вимірювання змін діаметра кровоносної судини в реальному часі, що включає задавання площини сканування та множини напрямків зондування в площині сканування, періодичне випромінювання послідовності ультразвукових зондуючих імпульсів вздовж кожного з напрямків, безперервний прийом ультразвукових хвиль, що виникають при відбиттях кожного із зондуючих імпульсів, перетворення відбитих хвиль в електричні сигнали відгуку,...
Спосіб ультразвукового вимірювання параметрів руху і пристрій для його реалізації
Номер патенту: 67829
Опубліковано: 15.07.2004
Автори: МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ, БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ, Волохов Володимир Олексійович, Гірник Сергій Арнольдович
МПК: A61B 8/00
Мітки: пристрій, вимірювання, ультразвукового, реалізації, параметрів, спосіб, руху
Формула / Реферат:
1. Спосіб ультразвукового імпульсного вимірювання параметрів руху суцільних середовищ, який містить задання напрямку зондування досліджуваного середовища, періодичне випромінювання вздовж заданого напрямку зондування послідовності зондуючих ультразвукових хвильових імпульсів, прийом ультразвукових хвиль, відбитих від досліджуваного середовища, перетворення відбитих ультразвукових хвиль в електричний сигнал відгуку, його підсилення,...
Пристрій для вимірювання електричного опору біологічних тканин для задач медичної діагностики
Номер патенту: 4889
Опубліковано: 15.02.2005
Автори: Арсенюк Ігор Ростиславович, Месюра Володимир Іванович, Роїк Олександр Митрофанович
МПК: A61B 5/05
Мітки: задач, електричного, тканин, діагностики, медичної, пристрій, біологічних, опору, вимірювання
Формула / Реферат:
Пристрій для вимірювання електричного опору біологічних тканин для задач медичної діагностики, що містить зразковий резистор, другий вивід якого з'єднаний з першим вимірювальним електродом, що з'єднується з першою точкою досліджуваної біологічної тканини, яка вибирається дослідником, і входом повторювача напруги, масштабний підсилювач, другий вимірювальний електрод, що з'єднується з другою точкою досліджуваної біологічної тканини, відмінною...
Спосіб вимірювання фазових томограм полікристалічних мереж оптико-анізотропних шарів біологічних тканин
Номер патенту: 70756
Опубліковано: 25.06.2012
Автори: Шолота Владислав Васильович, Заболотна Наталія Іванівна, Чередник Олександр Геннадійович
МПК: G01N 33/00
Мітки: фазових, мереж, оптико-анізотропних, тканин, біологічних, спосіб, полікристалічних, вимірювання, шарів, томограм
Формула / Реферат:
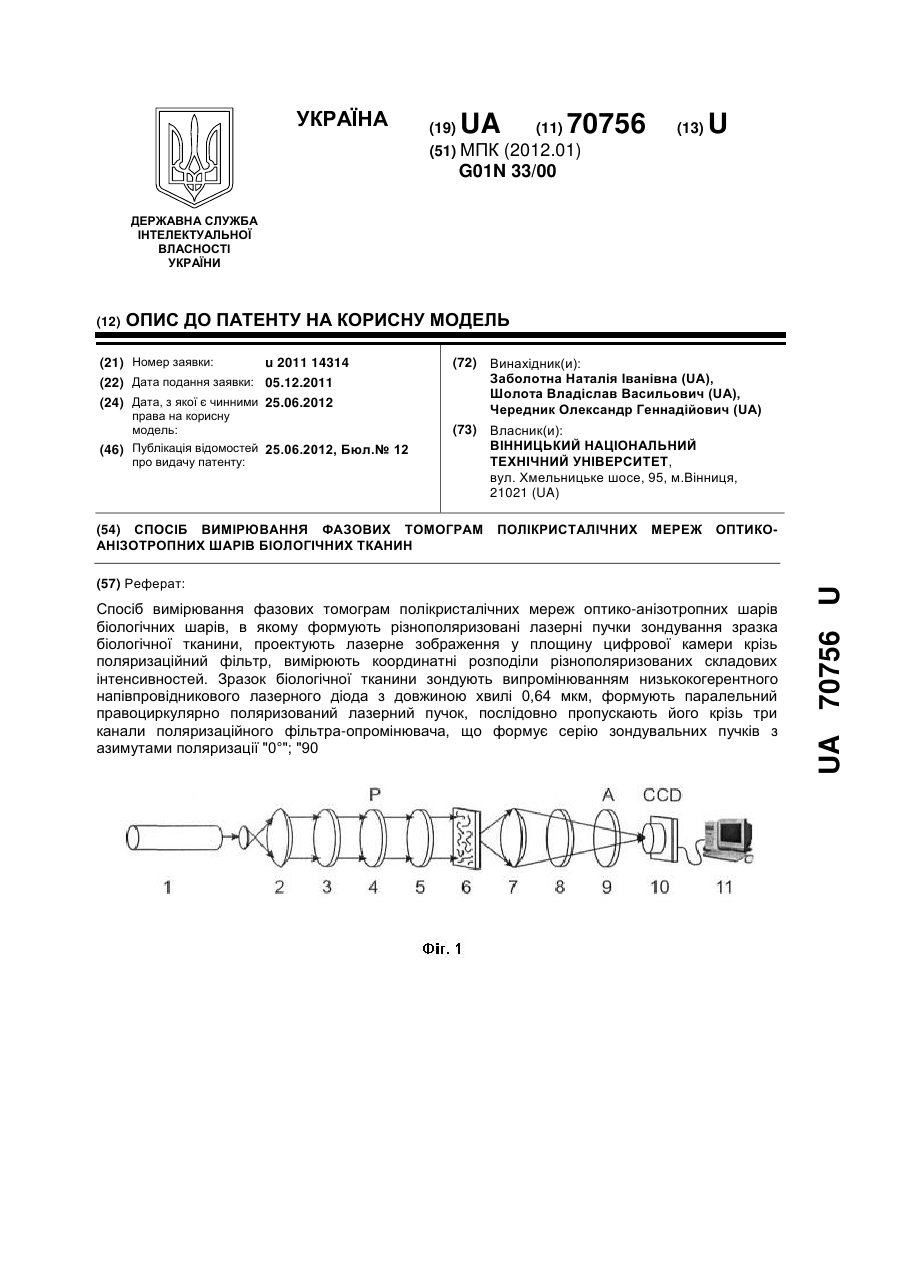
Спосіб вимірювання фазових томограм полiкристалічних мереж оптико-анізотропних шарів біологічних шарів, в якому формують різнополяризовані лазерні пучки зондування зразка біологічної тканини, проектують лазерне зображення у площину цифрової камери крізь поляризаційний фільтр, вимірюють координатні розподіли різнополяризованих складових інтенсивності, який відрізняється тим, що зразок біологічної тканини зондують випромінюванням...
Попередній патент: Спосіб безперервного спікання мінерального матеріалу і обладнання для спікання
Наступний патент: Спосіб визначення відповідності розмірів легенів плода терміну вагітності
Випадковий патент: Шихта для отримання залізофлюсу з відходів металургійного виробництва