Безпілотний авіаційний комплекс


Формула / Реферат
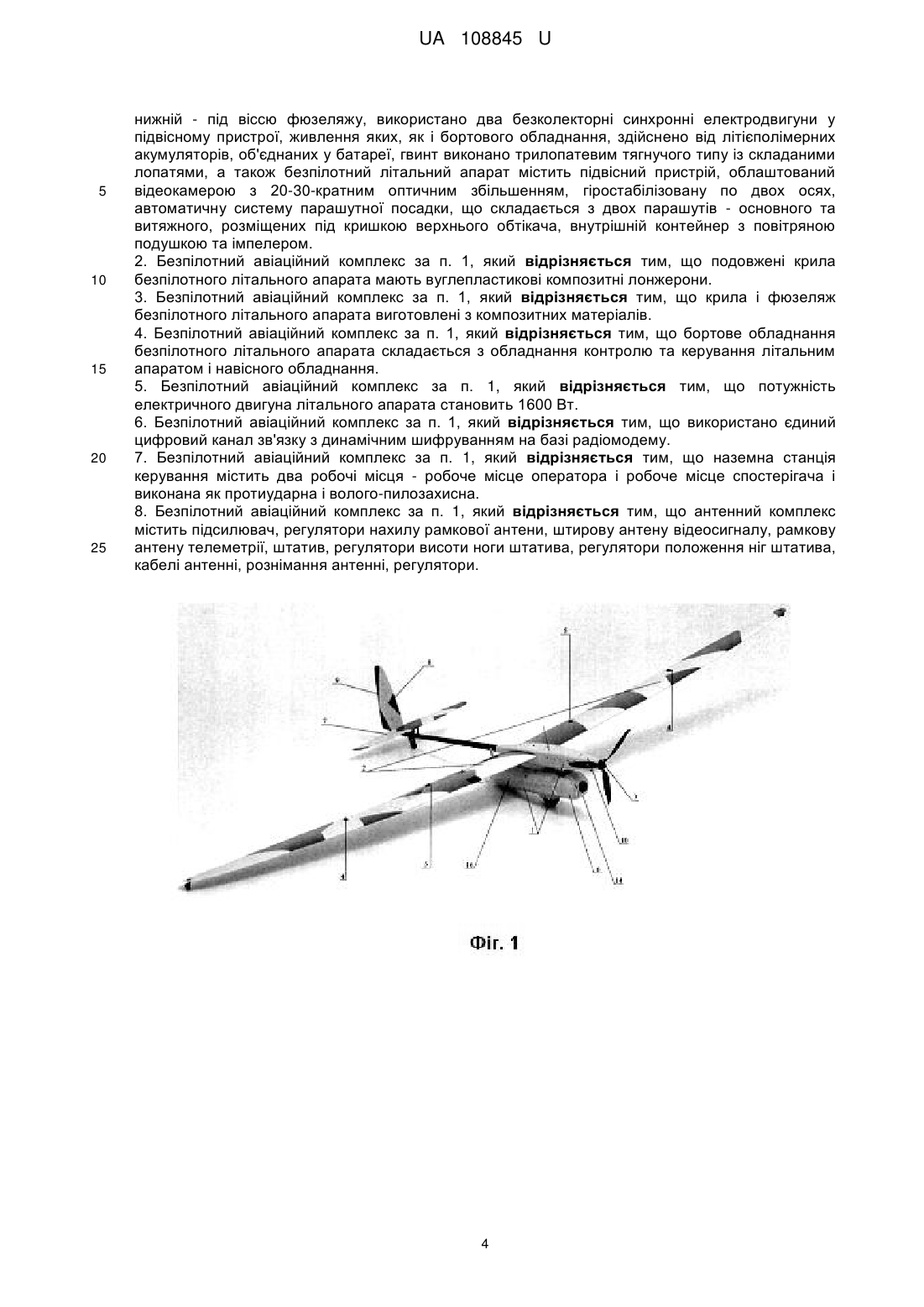
1. Безпілотний авіаційний комплекс, що містить безпілотний літальний апарат, який включає фюзеляж, подовжені крила, гвинт, елерони, закрилки, стабілізатор, кіль, руль повороту, електродвигун, бортове обладнання, а також наземну станцію керування, антенний комплекс, щоглу і/або штатив для кріплення антенного комплексу, комплект акумуляторних батарей для безпілотного літального апарата, зарядну станцію, пульт технологічний для передпольотної перевірки, комплект запасних частин і допоміжного обладнання для проведення дрібного ремонту в польових умовах, який відрізняється тим, що центральна консоль крила літального апарата закріплена до фюзеляжу, додано обтікачі - верхній над центральною консоллю крила і нижній - під віссю фюзеляжу, використано два безколекторні синхронні електродвигуни у підвісному пристрої, живлення яких, як і бортового обладнання, здійснено від літієполімерних акумуляторів, об'єднаних у батареї, гвинт виконано трилопатевим тягнучого типу із складаними лопатями, а також безпілотний літальний апарат містить підвісний пристрій, облаштований відеокамерою з 20-30-кратним оптичним збільшенням, гіростабілізовану по двох осях, автоматичну систему парашутної посадки, що складається з двох парашутів - основного та витяжного, розміщених під кришкою верхнього обтікача, внутрішній контейнер з повітряною подушкою та імпелером.
2. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що подовжені крила безпілотного літального апарата мають вуглепластикові композитні лонжерони.
3. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що крила і фюзеляж безпілотного літального апарата виготовлені з композитних матеріалів.
4. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що бортове обладнання безпілотного літального апарата складається з обладнання контролю та керування літальним апаратом і навісного обладнання.
5. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що потужність електричного двигуна літального апарата становить 1600 Вт.
6. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що використано єдиний цифровий канал зв'язку з динамічним шифруванням на базі радіомодему.
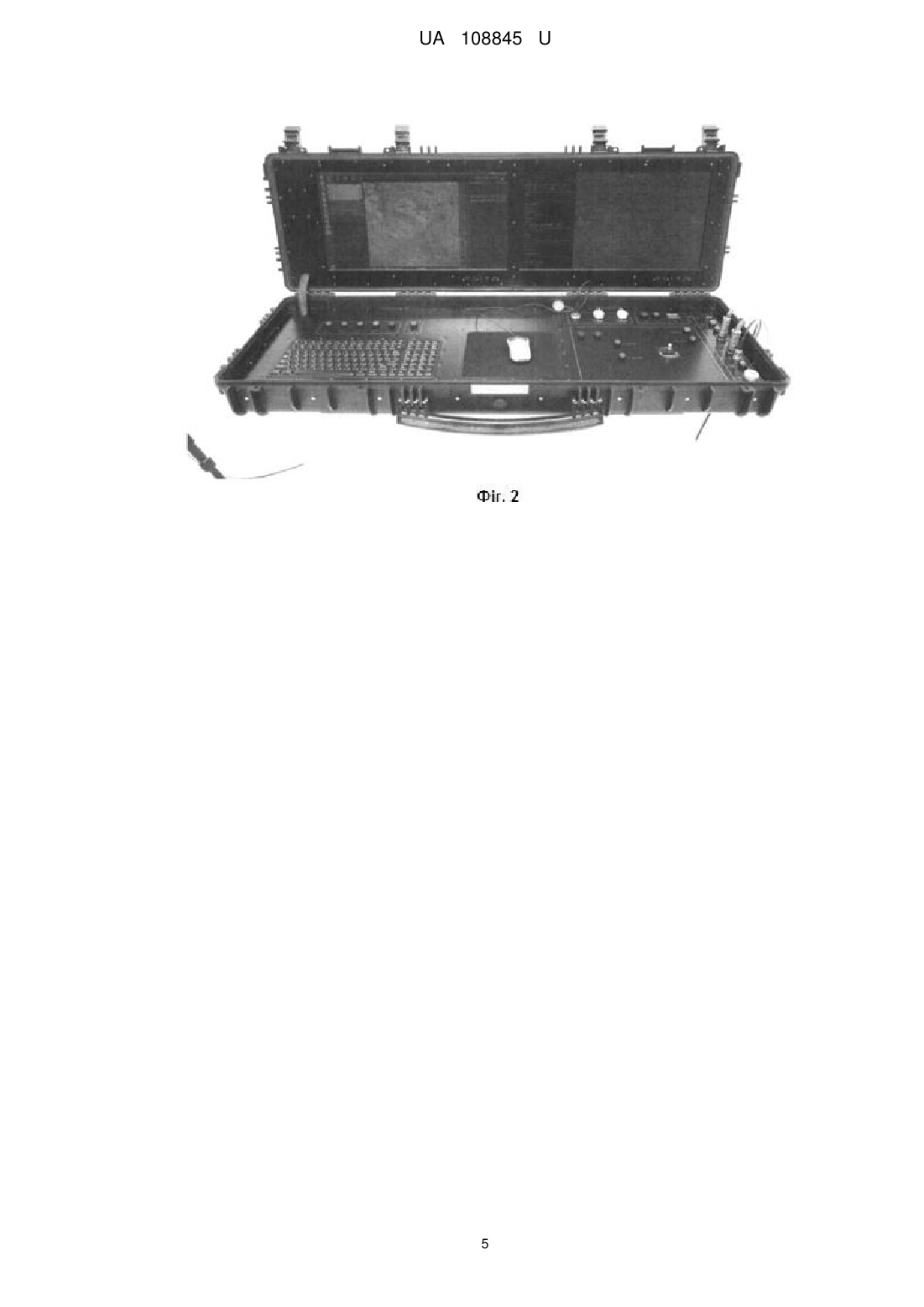
7. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що наземна станція керування містить два робочі місця - робоче місце оператора і робоче місце спостерігача і виконана як протиударна і волого-пилозахисна.
8. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що антенний комплекс містить підсилювач, регулятори нахилу рамкової антени, штирову антену відеосигналу, рамкову антену телеметрії, штатив, регулятори висоти ноги штатива, регулятори положення ніг штатива, кабелі антенні, рознімання антенні, регулятори.
Текст
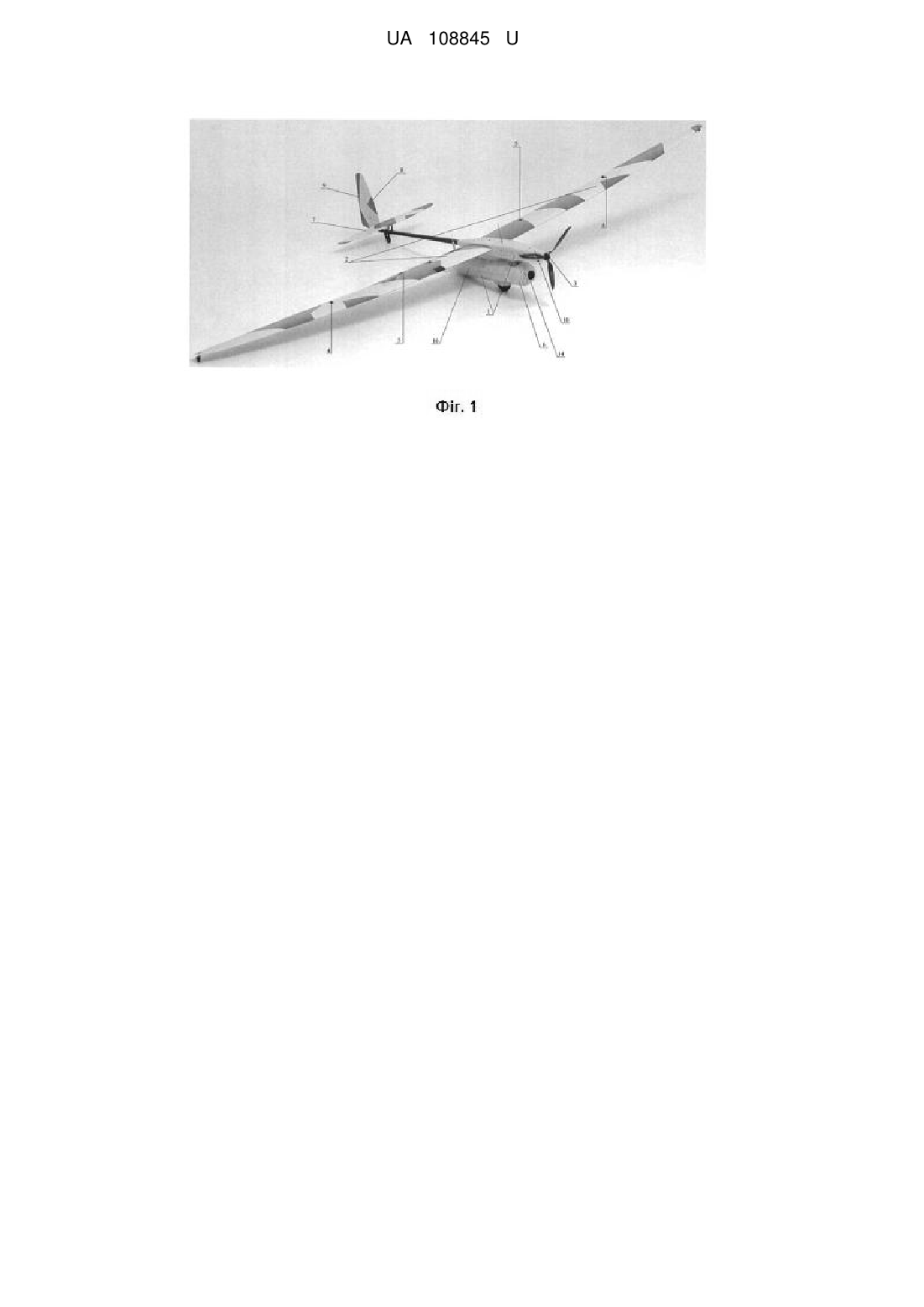
Реферат: Безпілотний авіаційний комплекс містить безпілотний літальний апарат, фюзеляж, подовжені крила, гвинт, елерони, закрилки, стабілізатор, кіль, руль повороту, електродвигун, бортове обладнання, а також наземну станцію керування, антенний комплекс, щоглу і/або штатив для кріплення антенного комплексу, комплект акумуляторних батарей для безпілотного літального апарата, зарядну станцію, пульт технологічний для передпольотної перевірки, комплект запасних частин і допоміжного обладнання для проведення дрібного ремонту в польових умовах. Центральна консоль крила літального апарата закріплена до фюзеляжу, додано обтікачі - верхній над центральною консоллю крила і нижній - під віссю фюзеляжу. Використовують два безколекторні синхронні електродвигуни у підвісному пристрої, живлення яких, як і бортового обладнання, здійснено від літій-полімерних акумуляторів, об'єднаних у батареї, гвинт виконано трилопатевим тягнучого типу із складаними лопатями. Також містить підвісний пристрій, облаштований відеокамерою з 20-30-кратним оптичним збільшенням, гіростабілізовану по двох осях, автоматичну систему парашутної посадки, що складається з двох парашутів - основного та витяжного, розміщених під кришкою верхнього обтікача, внутрішній контейнер з повітряною подушкою та імпелером. 2 UA 108845 U (12) UA 108845 U UA 108845 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі авіаційної техніки і може бути використана у військовій справі, а саме у повітряній розвідці: виявлення і визначення координат бойової техніки, розташування військ, укріплених позицій супротивника для цілевказання, корегування вогню артилерії, а також передбачено промислове застосування - патрулювання виділених районів місцевості, виявлення вогнищ стихійних лих і надзвичайних подій, зовнішній контроль справності протяжних шляхопроводів і виявлення пошкоджених ділянок (шляхів, нафтогазопроводів, ліній електропередач). Відомо безпілотний авіаційний комплекс, що включає два безпілотні літальні апарати, наземну станцію керування, антенний комплекс, щоглу і/або штатив для кріплення антенного комплексу, комплект акумуляторних батарей для безпілотного літального апарата, зарядну станцію, пульт технологічний для передпольотної перевірки, комплект запасних частин і допоміжного обладнання для проведення дрібного ремонту в польових умовах [UA № 102118, В64С 27/00, 2015]. Зазначений безпілотний авіаційний комплекс не має достатньо високих льотно-технічних характеристик і ступеня надійності при застосуванні. В основу корисної моделі поставлено задачу удосконалити конструкцію безпілотного авіаційного комплексу для підвищення його льотно-технічних характеристик. Поставлену задачу вирішують тим, що у безпілотному авіаційному комплексі, що включає безпілотний літальний апарат, який містить фюзеляж, подовжені крила, гвинт, елерони, закрилки, стабілізатор, кіль, руль повороту, електродвигун, бортове обладнання, а також наземну станцію керування, антенний комплекс, щоглу і/або штатив для кріплення антенного комплексу, комплект акумуляторних батарей для безпілотного літального апарату, зарядну станцію, пульт технологічний для передпольотної перевірки, комплект запасних частин і допоміжного обладнання для проведення дрібного ремонту в польових умовах, згідно з корисною моделлю, центральна консоль крила літального апарата закріплена до фюзеляжу, додано обтікачі - верхній над центральною консоллю крила і нижній - під віссю фюзеляжу, використано два безколекторні синхронні електродвигуни у підвісному пристрої, живлення яких, як і бортового обладнання, здійснено від літій-полімерних акумуляторів, об'єднаних у батареї, гвинт виконано трилопатевим тягнучого типу із складаними лопатями, а також безпілотний літальний апарат містить підвісний пристрій, облаштований відеокамерою з 20-30-кратним оптичним збільшенням, гіростабілізовану по двох осях, автоматичну систему парашутної посадки, що складається з двох парашутів - основного та витяжного, розміщених під кришкою верхнього обтікача, внутрішній контейнер з повітряною подушкою та імпелером. Згідно з корисною моделлю, подовжені крила безпілотного літального апарата мають вуглепластикові композитні лонжерони. Згідно з корисною моделлю, крила і фюзеляж безпілотного літального апарата виготовлені з композитних матеріалів. Згідно з корисною моделлю, бортове обладнання безпілотного літального апарата складається з обладнання контролю та керування літальним апаратом і навісного обладнання. Згідно з корисною моделлю, потужність електричного двигуна безпілотного літального апарата становить 1600 Вт. Згідно з корисною моделлю, У безпілотному літальному апараті використано єдиний цифровий канал зв'язку з динамічним шифруванням на базі радіомодему. Згідно з корисною моделлю, наземна станція керування містить два робочі місця - робоче місце оператора і робоче місце спостерігача і виконана як протиударна і волого-пилозахисна. Згідно з корисною моделлю, антенний комплекс містить підсилювач, регулятори нахилу рамкової антени, штирову антену відеосигналу, рамкову антену телеметрії, штатив, регулятори висоти ноги штатива, регулятори положення ніг штатива, кабелі антенні, рознімання антенні, регулятори. Через конструктивні зміни - відсутності верхнього пілону, кріплення центральної консолі крила безпосередньо до фюзеляжу, зміни форми фюзеляжу за рахунок додавання обтікачів верхнього (над центральною консоллю крила) та нижнього (під віссю фюзеляжу), а також підсилення потужності синхронних безколекторних електродвигунів і застосування трилопатевого гвинта тягнучого типу із складаними лопатями збільшено аеродинамічну якість до показника 20-25. Застосування трилопатевого гвинта стабілізувало мінімальну швидкість польоту в межах 1012 м/с на малих обертах двигуна, що підвищило зручність відеозйомки та максимальну швидкість до 30 м/с. Завдяки підвищенню максимальної швидкості БпЛА Observer SMP має можливість виконувати політ і проводити відеозйомку в більш складних метеоумовах (при наявності зустрічного вітру з поривами 10-15 м/с). Використання трилопатевого гвинта із 1 UA 108845 U 5 10 15 20 25 30 35 40 45 50 55 60 складаними лопатями підвищило живучість апарата завдяки зниженню ризику пошкоджень гвинта при посадці на поверхню з нерівностями рельєфу. Проведено модернізацію акумуляторних батарей, змінено конструкцію та з’єднання їх елементів, збільшено ємкість батарей до 28 А/г при збереженні ваги та розмірів. За рахунок наведених змін мінімальний час знаходження у польоті збільшено від 60 до 90 хвилин, навіть при максимальній масі корисного навантаження. Збільшення потужності акумуляторних батарей зробило можливим застосування двох синхронних безколекторних електродвигунів у підвісному пристрої дозволило здійснювати керування поворотом відеокамери по двох осях X і Z - одночасно. У прототипу один двигун дозволяв послідовно керувати поворотом відеокамери по одній, слідом по другій осі. Таким чином вирішено завдання підвищення безперервності відеозйомки визначених об'єктів. Заміна одноколісного шасі літального апарата на внутрішній контейнер з повітряною подушкою та імпелером (повіртонадувачем) дозволило здійснювати посадку апарата в умовах несприятливого рельєфу на повітряну подушку з уникненням від пошкоджень. Змінено систему зв'язку - використано єдиний цифровий канал зв'язку з динамічним шифруванням на базі відповідного радіомодему. Це рішення дозволяє передавати з певним захистом від первісного перехоплення за єдиним каналом відеосигнал, телеметричні дані, координати визначеного об'єкту та здійснювати по цьому ж каналу керування апаратом (зміна маршруту, висоти, швидкості) та відеокамерою при виконанні польотного завдання. Завдяки конструктивним змінам у фюзеляжі, не дивлячись на застосування додаткового обладнання, злітна вага літального апарата лишилася в межах 5,8 кг. Корисна модель пояснюється ілюстраціями. На Фіг. 1 зображено безпілотний літальний апарат; на Фіг. 2 - наземну станцію керування; на Фіг. 3, Фіг. 4 - антенний комплекс; на Фіг. 5 - пульт технологічний; на Фіг. 6 - батарею акумуляторну; на Фіг. 7 - вигляд безпілотного літального апарата з підвісним пристроєм (в ньому відеокамерою), з трилопатевим гвинтом тягнучого типу, безколекторним синхронним електродвигуном у носовій частині корпусу фюзеляжу; на Фіг. 8 - вигляд безпілотного літального апарату зі стабілізатором, кілем, кермом напряму; на Фіг. 9 - розмах крила, закрилки; на Фіг. 10 - вигляд фюзеляжу з верхнім обтікачем, де розташовані витяжний та основний парашути. Безпілотний авіаційний комплекс включає безпілотний літальний апарат (Фіг. 1), наземну станцію керування (Фіг. 2), антенний комплекс (Фіг. 3, Фіг. 4), щоглу і/або штатив для кріплення антенного комплексу, комплект акумуляторних батарей (Фіг. 6) для безпілотного літального апарата, зарядну станцію, пульт технологічний (Фіг. 5) для передпольотної перевірки, комплект запасних частин і допоміжного обладнання для проведення дрібного ремонту в польових умовах. Безпілотний літальний апарат містить фюзеляж 1 (капсула з обладнанням, розміщена за схемою центроплан подовженого крила, розділеного на консолі), подовжені крила 2, що мають вуглепластикові композитні лонжерони, гвинт 3 трилопатевий тягнучого типу із складаними лопатями, елерони 4, закрилки 5, підвісний пристрій, облаштований відеокамерою 6 з 20-30кратним оптичним збільшенням, стабілізатор 7, кіль 8, руль повороту 9, синхронний безколекторний електродвигун 10 потужністю 1600 Вт, бортове обладнання. Центральна консоль 11 крила закріплена до фюзеляжу 1. Додано обтікачі - верхній 12 над центральною консоллю 11 крила і нижній 13 - під віссю фюзеляжу 1. Додано один електродвигун (всього 2) у підвісний пристрій. Живлення безколекторного синхронного електродвигуна 10, електродвигунів підвісного пристрою, відеокамери та бортового обладнання здійснено від літій-полімерних акумуляторів, об'єднаних у батареї. Безпілотний літальний апарат містить пристрій 14 з відеокамерою для спостереження, гіростабілізований по двох осях, автоматичну систему парашутної посадки, що складається з двох парашутів 15 - основного та витяжного, розміщених під кришкою верхнього 12 обтікача, внутрішній контейнер 16 з повітряною подушкою та імпелером. Крила і фюзеляж виготовлені з композитних матеріалів. Бортове обладнання складається з обладнання контролю та керування літальним апаратом і навісного обладнання. Безпілотний літальний апарат містить єдиний цифровий канал зв'язку з динамічним шифруванням на базі радіомодему. 2 UA 108845 U 5 10 15 20 25 30 35 40 45 Безпілотний авіаційний комплекс (БПАК), що заявляється, - це багатоцільовий комплекс повітряного спостереження та фотовідеозйомки на базі багатофункціонального безпілотного літального апарата з використанням режиму автоматичного польоту по заданій траєкторії і автоматичного режиму зльоту/посадки. БПАК має високий ступінь мобільності - весь комплект може вміститися в салоні легкового автомобіля-позашляховика. В умовах екстремальних ситуацій і рельєфу (гірська і лісиста місцевість) комплекс транспортується групою з чотирьох чоловік. БПАК повністю автономний, немає спеціальних вимог для електроживлення і маскування. 2 Для злітної площадки достатньо рівної ділянки місцевості 20×40 м з будь-яким покриттям. Комплекс дозволяє проводити запуск безпілотного літального апарата з руки (без застосування катапульт і стартових пристроїв), що дозволяє використовувати безпілотний літальний апарат на обмежених майданчиках (наприклад запуск з човна, на схилі місцевості або на майданчику з великим скупченням дрібних рельєфів - каменів, купин). Відсутні громіздкі додаткові пристрої. Низькі масо-габаритні показники у поєднанні з високими льотно-технічними характеристиками є явною перевагою БПАК. У складеному для транспортування вигляді комплекс має три контейнери (2 транспортних ящики 1700×400×500 мм, 1 кейс наземної станції керування (1200×250×500). Загальний обсяг комплексу в стані для транспортування не 3 перевищує 1 м . Масо-габаритні показники БПЛА в складі комплексу дозволяють домогтися високої аеродинамічної якості. БПАК не є енергоємним, при цьому, завдяки конструктивному виконанню планера БПЛА і застосуванню композитних матеріалів, комплекс має порівняно невелику злітну вагу, а маса корисного навантаження може досягати 40-45 % загальної злітної ваги. БПАК простий у використанні і не вимагає спеціальних навичок для експлуатації. Витрати на технічне обслуговування мінімальні. Завдяки модульній конструкції можливий ремонт шляхом заміни поламаних елементів БПЛА в польових умовах. БПАК оснащено двома літальними апаратами, що дозволяє організовувати безперервне спостереження, а також зберігає його працездатність у разі катастрофи, руйнування в результаті непередбачених обставин. Крім того, на комплексі встановлено спеціальне програмне обладнання, що дозволяє при експлуатації повністю автоматизувати процес зльоту, посадки, польоту за маршрутом, зміни швидкості і висоти польоту, керування відеокамерою. Використання на безпілотному літальному апараті в складі БПАК відеокамери з оптичним зумом високого розрізнення (20-30-кратним) також є перевагою комплексу. Безпілотний літальний апарат (БпЛА) здатний виконувати автоматичний політ по заданому маршруту з можливістю його коректування в режимі реального часу. Протягом всього польоту БпЛА передає інформацію про хід виконання польотів, своє місце розташування з прив'язкою на карті, повітряної і шляхової швидкості, курс польоту, висоту БПАК При необхідності БпЛА у зазначеній точці здійснює автоматично аерофотозйомку місцевості. Відеокамера, встановлена на БпЛА, керується оператором по двох осях з наземної станції, БпЛА має режим обльоту зазначеної точки із заданим радіусом, автоматично здійснюючи корекційну поправку, враховуючи кутові швидкості польоту, що виникають при дії атмосферних погодних явищ. БпЛА в автоматичному режимі розраховує координати цілі, що спостерігається. Здійснено автоматичний супровід нерухомої наземної цілі. Повністю автоматичне виконання польотного завдання, враховуючи етап зльоту та посадки, досягається за рахунок використання системи автопілотування високої аеродинамічної досконалості безпілотного літального апарата. 50 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 1. Безпілотний авіаційний комплекс, що містить безпілотний літальний апарат, який включає фюзеляж, подовжені крила, гвинт, елерони, закрилки, стабілізатор, кіль, руль повороту, електродвигун, бортове обладнання, а також наземну станцію керування, антенний комплекс, щоглу і/або штатив для кріплення антенного комплексу, комплект акумуляторних батарей для безпілотного літального апарата, зарядну станцію, пульт технологічний для передпольотної перевірки, комплект запасних частин і допоміжного обладнання для проведення дрібного ремонту в польових умовах, який відрізняється тим, що центральна консоль крила літального апарата закріплена до фюзеляжу, додано обтікачі - верхній над центральною консоллю крила і 3 UA 108845 U 5 10 15 20 25 нижній - під віссю фюзеляжу, використано два безколекторні синхронні електродвигуни у підвісному пристрої, живлення яких, як і бортового обладнання, здійснено від літієполімерних акумуляторів, об'єднаних у батареї, гвинт виконано трилопатевим тягнучого типу із складаними лопатями, а також безпілотний літальний апарат містить підвісний пристрій, облаштований відеокамерою з 20-30-кратним оптичним збільшенням, гіростабілізовану по двох осях, автоматичну систему парашутної посадки, що складається з двох парашутів - основного та витяжного, розміщених під кришкою верхнього обтікача, внутрішній контейнер з повітряною подушкою та імпелером. 2. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що подовжені крила безпілотного літального апарата мають вуглепластикові композитні лонжерони. 3. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що крила і фюзеляж безпілотного літального апарата виготовлені з композитних матеріалів. 4. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що бортове обладнання безпілотного літального апарата складається з обладнання контролю та керування літальним апаратом і навісного обладнання. 5. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що потужність електричного двигуна літального апарата становить 1600 Вт. 6. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що використано єдиний цифровий канал зв'язку з динамічним шифруванням на базі радіомодему. 7. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що наземна станція керування містить два робочі місця - робоче місце оператора і робоче місце спостерігача і виконана як протиударна і волого-пилозахисна. 8. Безпілотний авіаційний комплекс за п. 1, який відрізняється тим, що антенний комплекс містить підсилювач, регулятори нахилу рамкової антени, штирову антену відеосигналу, рамкову антену телеметрії, штатив, регулятори висоти ноги штатива, регулятори положення ніг штатива, кабелі антенні, рознімання антенні, регулятори. 4 UA 108845 U 5 UA 108845 U 6 UA 108845 U 7 UA 108845 U 8 UA 108845 U 9 UA 108845 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 39/02, B64C 27/00, B64C 31/028, B64C 1/00
Мітки: безпілотний, комплекс, авіаційний
Код посилання
<a href="https://ua.patents.su/12-108845-bezpilotnijj-aviacijjnijj-kompleks.html" target="_blank" rel="follow" title="База патентів України">Безпілотний авіаційний комплекс</a>
Безпілотний авіаційний комплекс

Номер патенту: 102118
Опубліковано: 12.10.2015
Автори: Мічковський Іван Миколайович, Шишов Дмитро Володимирович
МПК: B64C 27/00, B64C 31/028, B64F 1/00, B64C 39/02
Мітки: авіаційний, комплекс, безпілотний
Формула / Реферат:
1. Безпілотний авіаційний комплекс, що включає безпілотний літальний апарат, наземну станцію керування, який відрізняється тим, що містить другий безпілотний літальний апарат, антенний комплекс, щоглу і/або штатив для кріплення антенного комплексу, комплект акумуляторних батарей для безпілотного літального апарата, зарядну станцію, пульт технологічний для передпольотної перевірки, комплект запасних частин і допоміжного обладнання для...
Безпілотний авіаційний комплекс безаеродромного базування
Номер патенту: 105398
Опубліковано: 10.03.2016
Автори: Петренко Микола Миколайович, Матійчик Михайло Петрович, Русаліна Людмила Володимірівна, Глущенко Максим Михайлович, Харченко Володимир Петрович
МПК: B64C 39/02, B64F 1/00
Мітки: безпілотний, авіаційний, комплекс, базування, безаеродромного
Формула / Реферат:
Безпілотний авіаційний комплекс безаеродромного базування, який складається з безпілотного літального апарата (БЛА) та пускового пристрою, при цьому безпілотний літальний апарат має стартову вагу до 20 кг, тягнучий повітряний гвинт і оснащений щонайменше одним двигуном внутрішнього згорання, що має фюзеляж з окремим вертикальним та горизонтальним хвостовим оперенням і містить два прямих крила, що розміщені по боках центральної частини корпусу...
Безпілотний літальний апарат

Номер патенту: 100737
Опубліковано: 10.08.2015
Автори: Масько Олександр Миколайович, Козей Ярослав Сергійович
МПК: B64C 39/00, B64C 39/02
Мітки: безпілотний, апарат, літальний
Формула / Реферат:
1. Безпілотний літальний апарат, що містить корпус для розміщення корисного навантаження та виконуючих механізмів, розкривні передні та задні крила, вертикальне оперення, двигун з пропелером розташований в носовій частині, аеродинамічні поверхні керування по крену та тангажу розміщені на передньому крилі, розкривні передні та задні крила розміщені на вузлах навіски з однією віссю обертання та мають фіксоване положення після розкриття з...
Безпілотний літальний апарат

Номер патенту: 97600
Опубліковано: 27.02.2012
Автори: Коростельов Олег Петрович, Масько Олександр Миколайович, Сайног Максим Борисович, Яковенко Петро Олексійович, Сухов Віталій Вікторович
МПК: B64C 39/00, B64C 39/02
Мітки: літальний, апарат, безпілотний
Формула / Реферат:
1. Безпілотний літальний апарат, що має транспортно-пусковий контейнер, стартовий пристрій, корпус, в якому встановлені маршовий двигун, апаратура керування, збору та передачі інформації, розкривні передні і задні крила та стабілізатори, який відрізняється тим, що стартовий пристрій виконаний у вигляді стартового двигуна, який розташований у хвостовій частині безпілотного літального апарата і з'єднаний з ним стикувальним пристроєм, що має...
Безпілотний літальний апарат з електричним двигуном
Номер патенту: 103119
Опубліковано: 10.12.2015
Автори: Матійчик Михайло Петрович, Харченко Володимир Петрович
МПК: B64C 39/02
Мітки: електричним, двигуном, апарат, безпілотний, літальний
Формула / Реферат:
Безпілотний літальний апарат з електричним двигуном, що містить крило з тонким профілем, що виконане зі зворотною стрілоподібністю та оснащене механізацією, який відрізняється тим, що крило має товстий профіль та у крила збільшене видовження, його закінцівки плавно відігнуті догори, хвостове оперення безпілотного літального апарата виконане V-подібним, а між крилом та фюзеляжем виконані сильно розвинуті переходи - зализи.
Попередній патент: Устаткування для підняття пасажирів у вертикальному напрямку
Наступний патент: Крем для топічної терапії офтальморозацеа
Випадковий патент: Спосіб одержання стевіозиду