Пристрій керування накопичувачем в схемі перетворювача частоти з ланкою постійного струму
Номер патенту: 113689
Опубліковано: 10.02.2017
Автори: Слободенюк Юлія Олександрівна, Смирнова Тамара Олександрівна, Бялобржеський Олексій Володимирович








Формула / Реферат
Пристрій керування накопичувачем в схемі перетворювача частоти з ланкою постійного струму, що містить індуктивність і ємність LC-фільтра у ланці постійного струму, з'єднані з входом автономного інвертора, вихід якого з'єднаний з асинхронним електродвигуном змінного струму через перший, другий та третій датчики струму, вал асинхронного двигуна, з'єднаний з датчиком швидкості, блок розрахунку струму iq, блок розрахунку струму іd, виходи блока розрахунку струму iq та іd, з'єднані з першими входами другого та третього суматорів відповідно, другі входи суматорів, з'єднані з другим та першим виходами першого координатного перетворювача струму iq та іd відповідно, входи якого з'єднані з входом низькочастотного фільтра, вхід якого з'єднаний з виходом першого, другого та третього датчика струму, виходи другого та третього суматорів відповідно з'єднані з входом регуляторів струму iq та id, виходи яких з'єднані з першими входами п'ятого та шостого суматорів відповідно, другі входи яких з'єднані з першим та другим виходом блока компенсації перехресних зв'язків відповідно, перший та третій вхід якого з'єднано з першим та другим виходом першого координатного перетворювача струму iq та іd відповідно, блок розрахунку кутової частоти ковзання, вихід якого з'єднаний із першим входом четвертого суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід четвертого суматора з'єднаний з входом інтегратора, вихід якого з'єднаний із другим входом першого координатного перетворювача, який відрізняється тим, що містить задатчик швидкості, вихід якого з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід першого суматора з'єднаний з входом регулятора швидкості, вихід якого з'єднаний з першого входом блока обмеження моменту, другий вхід якого з'єднаний з виходом датчика швидкості, а третій з'єднаний з виходом задатчика струму обмеження ІSLIM, вихід блока обмеження моменту з'єднаний з входом блока розрахунку потокозчеплення ротора, вихід якого з'єднаний з другим входом блоком розрахунку струму iq, перший вхід якого з'єднаний з виходом блока обмеження моменту, блок розрахунку струму id, перший вхід якого з'єднаний з виходом блока обмеження моменту, а другий вхід з виходом блока розрахунку потокозчеплення ротора, блок розрахунку кутової частоти ковзання, вхід якого з'єднаний з виходом блоку обмеження момент), а другий вхід і виходом блока розрахунку потокозчеплення ротора, блок компенсації перехресних зв'язків, другий вхід якого з'єднано з виходом датчика швидкості другого координатного перетворювача, перший та другий вхід якого з'єднано з виходами п'ятого та шостого суматора відповідно, третій вхід другого координатного перетворювача з'єднано з виходом інтегратора, вихід другого координатного перетворювача з'єднаний з входом блока широтно-імпульсної модуляції, вихід блока широтно-імпульсної модуляції з'єднаний з керуючими виходами автономного інвертора, випрямляч, який з'єднаний з входом ланки постійного струму, накопичувальний елемент, з'єднаний з виходом перетворювача постійної напруги, вхід якого з'єднаний з ланкою постійного струму через дросель та четвертий датчик струму, систему регулювання перетворювача постійної напруги, яка складається з задатчика напруги, вихід якого з'єднаний з першим входом сьомого суматора, другий вхід якого з'єднаний з виходом першого датчика напруги, який з'єднано з ємністю LC-фільтра, вихід сьомого суматора з'єднаний з входом блока регулятора напруги, вихід якого з'єднаний з першим входом восьмого суматора, другий вхід якого з'єднаний з четвертим датчиком струму, вихід восьмого суматора з'єднаний з входом релейного регулятора, вихід якого з'єднаний з першим входом елемента блокування, другий вхід якого з'єднаний з блоком порівняння напруги, перший вхід якого з'єднаний з задавачем напруги, а другий вхід з другим датчиком напруги, який з'єднаний паралельно з накопичувальним елементом, вихід елемента блокування з'єднаний з керуючими виходами перетворювача постійної напруги.
Текст
Реферат: Пристрій керування накопичувачем в схемі перетворювача частоти з ланкою постійного струму містить індуктивність і ємність LC-фільтра у ланці постійного струму, автономний інвертор, асинхронний електродвигун змінного струму, датчики струму, вал асинхронного двигуна, датчик швидкості, блок розрахунку струму iq, блок розрахунку струму іd, координатний суматор перетворювача струму iq та іd, низькочастотний фільтр, регулятори струму iq та id, блок компенсації перехресних зв'язків, блок розрахунку кутової частоти ковзання, інтегратор, задатчик швидкості, блок обмеження моменту, задатчик струму обмеження І SLIM, блок розрахунку потокозчеплення ротора, блок обмеження моменту, блок розрахунку струму id, блок розрахунку потокозчеплення ротора, блок розрахунку кутової частоти ковзання, блок компенсації перехресних зв'язків, блок широтно-імпульсної модуляції, випрямляч, дросель, релейний регулятор, елемент блокування, блок порівняння напруги та накопичувальний елемент. UA 113689 U (12) UA 113689 U UA 113689 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі електротехніки і може бути використана в промисловості та на електрифікованих залізницях для векторного керування електродвигуном змінного струму з автономним інвертором для забезпечення динамічних режимів руху та регенеративного гальмування з можливістю накопичення надлишкової енергії гальмування на накопичувальному елементі. Відоме технічне рішення, пристрій [Пристрій для перетворення електрисної потужності, патент Російської Федерації 2209502. МПК Н02Р 21/00, Н02М 7/757. Опубл. 27.07.2003 Бюл. № 4. Інаріда Сатору, Танамачі Токуносуке, Наката Кийоші], що містить індуктивність, з'єднану з входом випрямляча, вихід якого з'єднаний з ємністю у ланці постійного струму та з'єднаний з входом автономного інвертора, що перетворює напругу на конденсаторі у змінну напругу з певною частотою, вихід якого з'єднаний з асинхронним електродвигуном змінного струму з'єднаний з датчиком швидкості, пристрій векторного керування, який виконує векторне керування асинхронним двигуном, складається задатчика струму осі q, задатчика струму осі d, перші входи задатчиків струму по осі d та по осі q з'єднані з другим та першим виходами координатного перетворювача по осі d та по осі q відповідно, входи якого з'єднані з виходом першого, другого та третього датчика струму, які з'єднані з фазами статора асинхронного електродвигуна змінного струму, виходи першого та другого суматорів відповідно з'єднані з регуляторами струмів по осі d та по осі q, виходи яких з'єднані з ділянкою генерування напруги сигналу ШІМ, генератора кутової частоти, перший вхід якого з'єднаний з виходом задатчика струму осі d, a другий - з виходом задатчика струму осі q, третій та четвертий з виходами координатного перетворювача по осі d та по осі q, вихід генератора кутової частоти з'єднаний із першим входом суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід суматора з'єднаний входом координатного перетворювача, вихід ділянки генерування напруги сигналу ШІМ з'єднаний з керуючими виходами автономного інвертора. Спільними ознаками аналога і корисної моделі є те, що пристрій містить індуктивність, з'єднану з входом випрямляча, вихід якого з'єднаний з ємністю у ланці постійного струму та з'єднаний з входом автономного інвертора, що перетворює напругу на конденсаторі у змінну напругу з певною частотою, вихід якого з'єднаний з асинхронним електродвигуном змінного струму, з'єднаний з датчиком швидкості, пристрій векторного керування, який виконує векторне керування асинхронним двигуном складається з задатчика струму осі q, задатчика струму осі d, перші входи задатчиків струму по осі d та по осі q з'єднані з другим та першим виходами координатного перетворювача по осі d та по осі q відповідно, входи якого з'єднані з виходом першого, другого та третього датчика струму, які з'єднані з фазами статора асинхронного електродвигуна змінного струму, виходи першого та другого суматорів відповідно з'єднані з регуляторами струмів по осі d та по осі q, виходи яких з'єднані з ділянкою генерування напруги сигналу ШІМ, генератора кутової частоти, перший вхід якого з'єднаний з виходом задатчика струму осі d, а другий - з виходом задатчика струму осі q, третій та четвертій - з виходами координатного перетворювача по осі d та по осі q, вихід генератора кутової частоти з'єднаний із першим входом суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід суматора з'єднаний входом координатного перетворювача, вихід ділянки генерування напруги сигналу ШІМ з'єднаний з керуючими виходами автономного інвертора. Причини, що перешкоджають одержанню очікуваного технічного результату: пристрій не має накопичувачів енергії, що робить неможливим режим регенеративного гальмування, та не мас контуру формування струмів по осі d та осі q. Відоме технічне рішення [Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, патент України 30471. МПК Н02Р 7/00, Н02Р 21/00. Опубл. 25.02.2008 Бюл. № 4 Волков О.В., Косенко І.О.], в якому регульоване джерело постійного струму виконане у вигляді трифазної мостової схеми нереверсивного тиристорного керованого випрямляча, підключеного входом до трифазної мережі змінного струму, з'єднаного виходом через згладжуючий реактор з входом автономного інвертора струму і зв'язаного керуючим входом через систему імпульсно-фазового керування з виходом регулятора струму, перший з входів якого є задаючим входом і з'єднаний з виходом обчислювача завдання регульованому джерелу, а другий вхід регулятора струму є входом від'ємного зворотного зв'язку і з'єднаний з виходом датчика струму, підключеного своїм входом до входу автономного інвертора струму. Блок керування виконаний у вигляді обчислювача модуля і перетворювача фаз, першого і другого обчислювачів гармонійних функцій, обчислювача фазних струмів інвертора, обчислювача прогнозуючого функціонала і обчислювача екстремального значення. При цьому перші входи обчислювача модуля і обчислювача гармонійних функцій з'єднані разом і є першим входом блока керування, а другі входи обчислювача модуля і обчислювача гармонійних функцій також з'єднані разом і є другим 1 UA 113689 U 5 10 15 20 25 30 35 40 45 50 55 60 входом блока керування. Вхід обчислювача фазних струмів інвертора з'єднаний з одним з входів обчислювача гармонійних функцій і виходом датчика струму і є третім входом блока керування, а вихід обчислювача фазних струмів інвертора пов'язаний через перетворювач фаз з іншим входом обчислювача гармонійних функцій. Обчислювач прогнозуючого функціонала з'єднаний своїми першим і другим входами відповідно з виходами першого і другого обчислювачів гармонійних функцій, а виходом - з входом обчислювача екстремального значення, вихід якого є виходом блока керування і пов'язаний через систему керування інвертором з керуючими входами інвертора. Обчислювач відхилень проекцій струму виконаний у вигляді координатного перетворювача, датчика гармонійних функцій потокозчеплення і блока суматорів, причому перший вхід координатного перетворювача з'єднаний з першим входом обчислювача завдання регульованому джерелу і виходом задавача намагнічувальної проекції струму і є першим входом обчислювача відхилень проекцій струму, а другий вхід координатного перетворювача підключений до другого входу обчислювача завдання регульованому джерелу і до виходу задавача активної проекції струму і є другим входом обчислювача відхилень проекцій струму. Третій і четвертий входи координатного перетворювача сполучені з першим і другим входами датчика гармонійних функцій потокозчеплення, а перший і другий виходи координатного перетворювача підключені до першого і другого входів блока суматорів, третій і четвертий входи якого сполучені з першим і другим виходами датчика проекцій статорного струму і є третім і четвертим входами обчислювача відхилень проекцій струму, а перший і другий виходи блока суматорів є першим і другим виходами обчислювача відхилень проекцій струму і приєднані до першого і другого входів блока керування. Датчик проекцій статорного струму виконаний у вигляді блока датчиків струму, підключеного своїми двома входами до двофазних статорних обмоток двигуна, а двома виходами - до першого і другого входів обчислювача проекцій статорного струму, виходи якого є першим і другим виходами датчика проекцій статорного струму. Спільними ознаками аналога і корисної моделі, що заявляється, є: регульоване джерело постійного струму, виконане у вигляді трифазної мостової схеми керованого випрямляча, яке з'єднане виходом через згладжуючий реактор з входом автономного інвертора. Блок керування виконаний у вигляді обчислювача модуля і перетворювача фаз, обчислювача фазних струмів інвертора. Обчислювач відхилень проекцій струму виконаний у вигляді координатного перетворювача, блок суматорів, причому перший вхід координатного перетворювача з'єднаний з виходом задавача намагнічувальної проекції струму і є входом обчислювача відхилень проекцій струму, а другий вхід координатного перетворювача підключений до виходу задавача активної проекції струму і є входом обчислювача відхилень проекцій струму. Виходи координатного перетворювача підключені до входів блока суматорів, входи якого сполучені з виходами датчика проекцій статорного струму і є входами обчислювача відхилень проекцій струму, а виходи блока суматорів є виходами обчислювача відхилень проекцій струму і приєднані до першого і другого входів блока керування. Датчик проекцій статорного струму виконаний у вигляді блока датчиків струму, підключеного своїми входами до фазних статорних обмоток двигуна, а виходами - до першого і другого входів обчислювача проекцій статорного струму, виходи якого є першим і другим виходами датчика проекцій статорного струму. Причини, що перешкоджають одержанню очікуваного технічною результату:пристрій не має накопичувачів енергії, що робить неможливим режим регенеративного гальмування, та не має контуру формування струмів по осі d та осі q. Відоме технічне рішення [Система векторного керування асинхронним двигуном, патент України 79969. МПК Н02Р 21/00. Опубл. 13.05.2013 Бюл. № 9. Огарь В.О., Лиходій І.О.] система векторного керування асинхронним двигуном, яка синтезована в координатній системі d, q, 0, використовує прямий та квадратурний канали регулювання, значення потокозчеплення та швидкості визначаються за допомогою відповідних блоків із значень струмів та напруг статора, яка відрізняється тим, що враховуються втрати у сталі шляхом введення в систему спостерігача стану за індуктивністю контуру намагнічування, спостерігач визначає індуктивність намагнічування з залежності від струму намагнічення, де за струм намагнічування приймається струм прямого каналу d, уточнене значення струму намагнічення використовується в адаптивних регуляторах та для уточнення розрахунку. Спільними ознаками аналога і корисної моделі, що заявляється, є: система векторного керування асинхронним двигуном, яка синтезована в координатній системі d, q, 0, використовує прямий та квадратурний канали регулювання, значення швидкості визначаються за допомогою відповідних блоків із значень струмів та напруг статора, де за струм намагнічування приймається струм прямого каналу d, уточнене значення струму намагнічення використовується в адаптивних регуляторах та для уточнення розрахунку. 2 UA 113689 U 5 10 15 20 25 30 35 40 45 50 55 60 Причини, що перешкоджають одержанню очікуваного технічного результату: пристрій не має накопичувачів енергії, що робить неможливим режим регенеративного гальмування; пристрій не має вхідного випрямляча, що робить неможливим живлення системи від мережі змінного струму. Найбільш близьким технічним рішенням до корисної моделі, що заявляється, є [Пристрій векторного керування для асинхронного двигуна, спосіб векторного керування асинхронним двигуном і пристрій керування приводом асинхронного двигуна, патент Російської Федерації 2392732. МПК Н02Р 21/00, Н02Р 21/12. Опубл. 20.06.2010 Китанака Хидетоси, Негоро Хидето] пристрій, що має основний ланцюг, який складається із джерела живлення постійного струму, коло LC-фільтра, сформоване із індуктивності і ємності, для зменшення протікання гармонійного струму на сторону джерела живлення, перший датчик напруги з'єднаний паралельно з ємністю LC-фільтра, автономний інвертор, який перетворює постійну напругу конденсатора в змінну напругу з довільною частотою, і пристрій векторного керування, який виконує векторне керування асинхронним двигуном, складається з датчика швидкості, який визначає швидкість обертання двигуна, датчика напруги, датчиків струму, виходи яких з'єднані із входами перетворювача координат, ділянка розрахунків вторинного магнітного потоку, входи якої з'єднані з виходами датчика напруги та задаючим впливом Тm, задаючий вплив Тm з'єднаний із входом за датчика струму осі q, до другого входу якого приєднаний перший вихід ділянки розрахунків вторинного магнітного потоку, другий вихід якого з'єднаний із входом задатчика струму осі d, другі виходи задатчиків струму осі q(d) з'єднані із входом ділянки розрахунків напруги без перешкод, перші входи ділянок генерування струму осі q(d) з'єднані з першими входами суматорів, другі входи суматорів з'єднані з виходами перетворювача координат q(d) відповідно, виходи суматорів з'єднані з регуляторами струмів по осі q(d), виходи яких з'єднані з першими входами суматорів, другі входи яких з'єднані з виходами ділянки розрахунків напруги без перешкод відповідно, виходи суматорів з'єднані з ділянкою генерування напруги сигналу ШІМ, вхід ділянки генерування напруги сигналу ШІМ з'єднаний з виходом датчика напруги, генератора кутової частоти, перший вхід якого з'єднаний з виходом задатчика струму осі q, a другий - з виходом перетворювача координат, вихід генератора кутової частоти з'єднаний із суматором, другий вхід якого з'єднаний з датчиком швидкості, вихід суматора з'єднаний з ділянкою розрахунків вторинного магнітного потоку й інтегратором, вихід якого з'єднаний із входами перетворювача координат і ділянки генерування напруги сигналу ШІМ, вихід ділянки генерування напруги сигналу ШІМ з'єднаний з автономним інвертором. Спільними ознаками аналога і корисної моделі, що заявляється, є: основний ланцюг, який складається із джерела живлення постійного струму, коло LC-фільтра, сформоване із індуктивності та ємності, для придушення протікання гармонійного струму на сторону джерела живлення, перший датчик напруги з з'єднаний паралельно з ємністю LC-фільтра, автономний інвертор, який перетворює постійну напругу конденсатора в змінну напругу з довільною частотою, і пристрій векторного керування, який виконує векторне керування асинхронним двигуном, складається з датчика швидкості, який визначає швидкість обертання двигуна, датчиків струму, задатчика струму осі q, задатчика струму осі d, перші входи задатчиків струму осі q(d) з'єднані з першими входами суматорів, другі входи суматорів з'єднані з виходами перетворювача координат q(d) відповідно, виходи суматорів з'єднані з регуляторами струмів по осі q(d), виходи яких з'єднані з ділянкою генерування напруги сигналу ШІМ, генератора кутової частоти, перший вхід якого з'єднаний з виходом задатчика струму осі q, а другий з виходом перетворювача координат, вихід генератора кутової частоти з'єднаний із суматором, датчика швидкості, вихід суматора з'єднаний з інтегратором, вихід якого з'єднаний із входом перетворювача координат, вихід ділянки генерування напруги сигналу ШІМ з'єднаний з автономним інвертором. Причини, що перешкоджають одержанню очікуваного технічного результату: пристрій не має накопичувачів енергії, що робить неможливим режим регенеративного гальмування; пристрій не має вхідного випрямляча, що робить неможливим живлення системи від мережі змінного струму. Відоме технічне рішення вибрано як прототип корисної моделі, що заявляється. В основу корисної моделі поставлена задача векторного керування тяговим електротехнічним комплексом та формування тягових характеристик з обмеженням електромагнітного моменту, що забезпечується пристроєм керування накопичувачем в схемі перетворювача частоти з ланкою постійного струму. Поставлена задача вирішується тим, що пристрій керування накопичувачем в схемі перетворювача частоти з ланкою постійного струму містить індуктивність і ємність LC-фільтра у лапці постійного струму, з'єднані з входом автономного інвертора, вихід якого з'єднаний з 3 UA 113689 U 5 10 15 20 25 30 35 40 45 50 55 60 асинхронним електродвигуном змінного струму через перший, другий та третій датчик струму, вал асинхронного двигуна з'єднаний з датчиком швидкості, блок розрахунку струму iq, блок розрахунку струму id, виходи блока розрахунку струму iq та іd з'єднані з першими входами другого та третього суматорів відповідно, другі входи суматорів з'єднані з другим та першим виходами першого координатного перетворювача струму iq та id відповідно, входи якого з'єднані з входом низькочастотного фільтра, вхід якого з'єднаний з виходом першого, другого та третього датчика струму, виходи другого та третього суматорів відповідно з'єднані з входом регуляторів струму іq та id, виходи яких з'єднані з першими входами п'ятого та шостого суматорів відповідно, другі входи яких з'єднані з першим та другим виходом блока компенсації перехресних зв'язків відповідно, перший та третій вхід якого з'єднано з першим та другим виходом першого координатного перетворювача струму іq та id відповідно, блок розрахунку кутової частоти ковзання, вихід якого з'єднаний із першим входом четвертого суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід четвертого суматора з'єднаний з входом інтегратора, вихід якого з'єднаний із другим входом першого координатного перетворювача, згідно з корисною моделлю, містить задатчик швидкості, вихід якого з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід першого суматора з'єднаний з входом регулятора швидкості, вихід якого з'єднаний з першого входом блока обмеження моменту, другий вхід якого з'єднаний з виходом датчика швидкості, а третій з'єднаний з виходом задатчика струму обмеження ISLIM, вихід блока обмеження моменту з'єднаний з входом блока розрахунку потокозчеплення ротора, вихід якого з'єднаний з другим входом блоком розрахунку струму iq, перший вхід якого з'єднаний з виходом блока обмеження моменту, блок розрахунку струму id, перший вхід якого з'єднаний з виходом блока обмеження моменту, а другий вхід з виходом блока розрахунку потокозчеплення ротора, блок розрахунку кутової частоти ковзання, вхід якого з'єднаний з виходом блока обмеження моменту, а другий вхід з виходом блока розрахунку потокозчеплення ротора, блок компенсації перехресних зв'язків, другий вхід якого з'єднано з виходом датчика швидкості другого координатного перетворювача, перший та другий вхід якого з'єднано з виходами п'ятого та шостого суматора відповідно, третій вхід другого координатного перетворювача з'єднано з виходом інтегратора, вихід другого координатного перетворювача з'єднаний з входом блока широтно-імпульсної модуляції, вихід блока широтно-імпульсної модуляції з'єднаний з керуючими виходами автономного інвертора, випрямляч, який з'єднаний з входом ланки постійного струму, накопичувальний елемент з'єднаний з виходом перетворювача постійної напруги, вхід якого з'єднаний з ланкою постійного струму через дросель та четвертий датчик струму, задатчик напруги, вихід якого з'єднаний з першим входом сьомого суматора, другий вхід якого з'єднаний з виходом першого датчика напруги, який з'єднано з ємністю LC-фільтра, вихід сьомого суматора з'єднаний з входом блока регулятора напруги, вихід якого з'єднаний з першим входом восьмого суматора, другий вхід якого з'єднаний з четвертим датчиком струму, вихід восьмого суматора з'єднаний з входом релейного регулятора, вихід якого з'єднаний з першим входом елемента блокування, другий вхід якого з'єднаний з блоком порівняння напруги, перший вхід якого з'єднаний з задавачем напруги, а другий вхід з другим датчиком напруги, який з'єднаний паралельно з накопичувальним елементом, вихід елемента блокування з'єднаний з керуючими виходами перетворювача постійної напруги. Вказані додаткові елементи і зв'язки між ними, а також зміни в порівнянні з прототипом, дозволяють забезпечити: накопичення енергії, яка виробляється електродвигуном в процесі гальмування на накопичувальний пристрій в ланці постійного струму (регенеративне гальмування), акумулювання та використання накопиченої енергії для роботи електродвигуна в наступному циклі руху. Корисна модель пояснюється кресленням, на якому зображено: 1 - індуктивність LCфільтра; 2 - ємність LC-фільтра; 3 - автономний інвертор; 4 - тяговий електродвигун змінного струму; 5 - датчик швидкості; 6 - другий суматор; 7 - третій суматор; 8 - перший координатний перетворювач; 9 - низькочастотний фільтр; 10 - перший датчик струму; 11 другий датчик струму; 12 - третій датчик струму; 13 - регулятор струму іq; 14 - регулятор струму іd; 15 - п'ятий суматор; 16 - шостий суматор; 17 - блок компенсації перехресних зв'язків; 18 - блок розрахунку кутової частоти ковзання, 19 - четвертий суматор; 20 - інтегратор; 21 - задатчик швидкості; 22 - перший суматор; 23 - регулятор швидкості; 24 - блок обмеження моменту; 25 - задатчик струму обмеження ІSLIM; 26 - блок розрахунку потокозчеплення ротора; 27 - блок розрахунку струму iq; 28 - блок розрахунку струму id; 29 - другий координатний перетворювач; 30 - блок широтноімпульсної модуляції; 31 - випрямляч; 32 - накопичувальний елемент; 33 - перетворювач постійної напруги; 34 - дросель; 35 - четверний датчик струму; 36 - задатчик напруги; 37 сьомий суматор; 38 перший датчик напруги; 39 - регулятор напруги; 40 - восьмий суматор; 41 4 UA 113689 U 5 10 15 релейний регулятор; 42 - елемент блокування; 43 - блок порівняння напруги; 44 - другий датчик напруги. Пристрій працює наступним чином. Електроенергія змінного струму від джерела живлення прикладається до вхід випрямляча 31, який перетворює змінну напругу в постійну, і через ланку постійного струму, де знаходиться LС-фільтр, Lф 1, Cф 2, для зменшення впливу вищих гармонійних складових, енергія надходить в автономний інвертор 3. Електроенергія з інвертора живить тяговий електродвигун змінного струму АД 4. Система керування автономним інвертором виконана у вигляді системи керування з непрямою орієнтацією за полем. Основними параметрами системи керування є фазні струми в статорній обмотці двигуна іА, іВ, iC, які контролюються першим, другим та третім датчиками струму 10-12. Сигнали з виходів датчиків надходять на вхід низькочастотного фільтра другого порядку 9, який забезпечує фільтрацію пульсацій вищих гармонік струму статора. Після фільтрації сигнали струму подаються на перший вхід блока першого координатного перетворювача 8, де відбувається перехід від трифазної нерухомої відносно статора системи координат abc до обертової разом з ротором dq та на першому та другому виходах діє сигнал: 2 id 3 i A cos iB cos( 120 ) iC cos( 120 ) 2 iq i A sin iB sin( 120 ) iC sin( 120 ) , (1) 3 i 1 (i i i ) 0 3 A B C де іА, іВ, іС - струми статора в трифазній системі; - кута положення узагальненого вектора 20 потокозчеплення; id, iq, i0 - реактивний, активний, і нульовий струм статора. Формування широтно-імпульсної модуляції для автономного інвертора забезпечується двома контурами регулювання: активної та реактивної складової статорного струму. * Заданий сигнал кутової швидкості ротора двигуна r з виходу задатчика швидкості 21 надходить на перший вхід першого суматора 22, на другий вхід якого надходить сигнал з блоку 25 датчика кутової швидкості 5r . На виході першого суматора 22 формується сигнал r , що надходить на вхід регулятора швидкості 23 r на виході якого формується сигнал заданого моменту М* k 1 M * , (2) HSC k sp si 2 1 1 s r 2TC (TCs 1) 3ZP r.пот 2T s 1 2Js Fтр де r.пот - потокозчеплення ротора; ZP - число пар полюсів; J - момент інерції двигуна; T - некомпенсована постійна часу; TC - некомпенсована постійна часу контуру швидкості; Fтр 30 коефіцієнт тертя. Сигнал заданого моменту M * з виходу регулятора швидкості 23, сигнал з датчика швидкості 23 r та сигнал ISLIM з виходу задатчика струму 25 ISLIM надходять на перший, другий та третій входи блока обмеження моменту 24 відповідно, де на виході формується сигнал моменту M M 35 1 при M* MПЕР , (3) 0 при M* MПЕР де ISLIM - допустимий струм силового перетворювача; L0 b0 - значення індуктивного намагнічування на лінійній ділянці; індуктивність розсіювання ротора; L r 40 2 3Zp r.пот ISLIML2 r2 0 - момент перевантаження. 2(L r L0 ) Сигнал моменту M з виходу блока обмеження моменту 24 надходить на вхід блока розрахунку потокозчеплення 26, на виході якого формується сигнал потокозчеплення ротора r MПЕР r 2M(L r L 0 ) . (4) 3 ZP 5 UA 113689 U Сигнали моменту M та потокозчеплення ротора r надходять на перший та другий вхід блока розрахунку активної складової статорного струму 27, відповідно, на виході якого формується сигнал заданої активної складової статорного струму i* q i* q 5 2M 3ZP r L r . (5) L 1 0 Сигнал активної складової струму i* надходить на перший вхід другого суматора 6, на q другий вхід якого надходить сигнал з блока першого координатного перетворювача 8 iq. На виході другого суматора 6 формується сигнал iq , який надходить на вхід регулятора струму iq 13, на виході якого формується сигнал активної складової наруги u * q u* TsR s k 1 q , (6) q HCC k p i s 2Tkck f ck sc ( 2Tkck f ck sc / R s )s iq 10 де Ts - постійна часу кола ротора; Tkc - некомпенсована постійна часу; k f c - коефіцієнт передачі перетворювача частоти по амплітуді напруги; k sc - коефіцієнт передачі датчика струму; R s - активний опір фази статора. Сигнали моменту M та потокозчеплення ротора r надходять на перший та другий вхід блока розрахунку реактивної складової статорного струму 28, відповідно, на виході якого 15 формується сигнал заданої реактивної складової статорного струму i* d i* d ( m ai )r , (7) bim де bi , ai - координати кривої намагнічування; m r2 2ML r 3Zp r 2 - потокозчеплення намагнічування, r - потокозчеплення ротора. Сигнал реактивної складової струму i* надходить на перший вхід третього суматора 7, на d 20 другий вхід якого надходить сигнал з блока першого координатного перетворювача 8 i . На d виході третього суматора 7 формується сигнал id , який надходить на вхід регулятора струму id 14, на виході якого формується сигнал реактивної складової наруги u * d TsR s u* ki 1 d . (8) s 2Tkck f ck sc (2Tkck f ck sc / R s )s id Сигнали активної iq та реактивної id складової струму з першого та другого виходів d HCC k p 25 30 першого координатного перетворювача 8, відповідно, та сигнал кутової швидкості r з датчика кутової швидкості 5 надходять на перший, третій та другий входи блока компенсації перехресних зв'язків 17, відповідно, на виходах якого формуються сигнали активної u q та реактивної складової u d напруги di d L L R sid r L s m r iq ud (Lm L s ) dt L m L r , (9) L mL r di q u L R siq r (Lm L s )id q r L r Lm dt де L r - індуктивність розсіювання статора; R s - активний опір фази статора; Lm індуктивність намагнічування. Сигнал активної складової наруги u * надходить на вхід п'ятого суматора 15, на другий вхід q якого надходить сигнал з виходу блока компенсації перехресних зв'язків 17 u q . На виході 6 UA 113689 U п'ятого суматора 15 формується сигнал u q , який надходить на перший вхід блока другого координатного перетворювача 29. Сигнал реактивної складової наруги u * надходить на перший вхід шостого суматора 16, на d другий вхід якого надходить сигнал з виходу блока компенсації перехресних зв'язків 17 u d . На 5 10 виході шостого суматора 16 формується сигнал ud , який надходить на другий вхід блока другого координатного перетворювача 29, на виході якою формується сигнал трифазної напруги abc u* u cos u sin d q a * ub ud cos( 120 ) uq sin( 120 ) . (10) * uc (ua ub ) Сигнали моменту M та потокозчеплення ротора r надходить на перший та другий вхід блока розрахунку кутової частоти ковзання s 18, відповідно, на виході якого формується сигнал кутової частоти ковзання s s 2Rr 3Zp r2 M , (11) де Rr - активний опір фази ротора. Сигнал кутової частоти ковзання s надходить на перший вхід четвертого суматора 18, на 15 20 другий вхід якого надходить сигнал з датчика швидкості 5 ротора двигуна r . На виході четвертого суматора формуються сигнал частоти поля статора, який надходить на вхід інтегратора 20, на виході якого формується сигнал кута положення узагальненого вектора потокозчеплення . Сигнал кута положення узагальненого вектора потокозчеплення , який надходить на другий та третій входи відповідно першого 8 та другого 29 координатного перетворювача. * Сигнал заданої напруги двигуна uabc надходить на вхід другого блока широтно-імпульсної модуляції 30 надходить, на виході якого формується вихідна напруга для фази А 25 30 35 * u 1якщо (ucarr ua ) крім 0; (12) VTa * u VTa 0 якщо (ucarr ua ) крім 1. де, опорна напруга 2 ucarr arctg tg fmod 2 t 90 , (13) де fmod - частота модуляції. Вихідні напруги по фазі В і С формуються аналогічно. Накопичувальний елемент 32 з'єднаний з виходом перетворювача постійної напруги 33, вхід якого з'єднаний з ланкою постійного струму через дросель 34. Перетворювач постійної наруги 33 конструктивно являє собою однофазний мостовий транзисторний перетворювач, напруга на якому пов'язана з параметрами режиму ланки постійного струму інвертора 3 наступними рівняннями: i d dc ustF Lb F uC udc , (14) f dt 1 ust Fi L dt Cst де ust - напруга на компенсуючого пристрою; udc - напруга на вході автономного інвертора; L b - індуктивність буферного дроселя; uCf - напруга на фільтрі; iL - струм буферного дроселя; Cst - ємність компенсуючого пристрою; F - комутаційна функція. Сигнал задатчика напруги 36 u * надходить на перший вхід сьомого суматора 37, на dc другий вхід якого надходить сигнал першого датчика напруги 38 7 u dc . На виході сьомого UA 113689 U суматора 37 формується сигнал udc , який надходить на вхід регулятора напруги 3, на виході якого формується сигнал заданого струму ланки постійного струму i* dc k Cf i* k i k Cf dc , (15) s 3Tk 12sT2k udc де Tk - некомпенсована постійна часу контуру напруги; k - коефіцієнт передачі перетворювача за амплітудою напруги; C f - ємність фільтра. HVC (s) k p 5 Сигнал заданого струму ланки постійного струму i* надходить на перший вхід восьмого dc суматора 40, на другий вхід якого надходить сигнал фактичного значення струму з четвертого датчика струму 35 idc . На виході суматора 40 формується сигнал idc , який надходить на вхід релейного регулятора 41, на виході якого формуються сигнали: uk.br 10 uk.br 1при idc i* , i* 0 dc dc 0 при idc i* , i* 0 dc dc , (16) 1при idc i* , i* 0 dc dc 0 при idc i* , i* 0 dc dc де i* - ширина зони гістерезису релейного регулятора, приймається такою, що дорівнює dc 15 i* 0,05Idc.пот розрахункового струму автономного інвертора; i* dc dc - похідна струму автономного інвертора. Сигнали з виходу релейного регулятора 41 подаються па перший вхід елемента блокування 42, на другий вхід якого надходить сигнал з виходу блока порівняння напруги 43. На перший вхід блока порівняння напруги 43 надходить сигнал задатчика напруги 36 u * , а на другий вхід dc сигнал з другого датчика напруги 44 ust на виході блока 43 формується сигнал uBU 20 25 1при ust u* . (17) dc 0 при ust u* dc На виході елемента блокування 42 формуються сигнали імпульсів керування u VT u VT.br uk.br uBU . (18) uVT.acc uk.acc uBU Сигнали з виходу елемента блокування 42 надходять на керуючі входи перетворювача постійної напруги u VT 33. В результаті роботи наведеного пристрою забезпечується: накопичення енергії, яка виробляється електродвигуном в процесі гальмування на накопичувальний пристрій в ланці постійного струму (регенеративне гальмування), акумулювання та використання накопиченої енергії для роботи електродвигуна в наступному циклі руху. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 45 Пристрій керування накопичувачем в схемі перетворювача частоти з ланкою постійного струму, що містить індуктивність і ємність LC-фільтра у ланці постійного струму, з'єднані з входом автономного інвертора, вихід якого з'єднаний з асинхронним електродвигуном змінного струму через перший, другий та третій датчики струму, вал асинхронного двигуна, з'єднаний з датчиком швидкості, блок розрахунку струму iq, блок розрахунку струму іd, виходи блока розрахунку струму iq та іd, з'єднані з першими входами другого та третього суматорів відповідно, другі входи суматорів, з'єднані з другим та першим виходами першого координатного перетворювача струму iq та іd відповідно, входи якого з'єднані з входом низькочастотного фільтра, вхід якого з'єднаний з виходом першого, другого та третього датчика струму, виходи другого та третього суматорів відповідно з'єднані з входом регуляторів струму iq та id, виходи яких з'єднані з першими входами п'ятого та шостого суматорів відповідно, другі входи яких з'єднані з першим та другим виходом блока компенсації перехресних зв'язків відповідно, перший та третій вхід якого з'єднано з першим та другим виходом першого координатного перетворювача струму iq та іd відповідно, блок розрахунку кутової частоти ковзання, вихід якого з'єднаний із першим входом четвертого суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід четвертого суматора з'єднаний з входом інтегратора, вихід якого з'єднаний із 8 UA 113689 U 5 10 15 20 25 другим входом першого координатного перетворювача, який відрізняється тим, що містить задатчик швидкості, вихід якого з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з датчиком швидкості, вихід першого суматора з'єднаний з входом регулятора швидкості, вихід якого з'єднаний з першого входом блока обмеження моменту, другий вхід якого з'єднаний з виходом датчика швидкості, а третій з'єднаний з виходом задатчика струму обмеження ІSLIM, вихід блока обмеження моменту з'єднаний з входом блока розрахунку потокозчеплення ротора, вихід якого з'єднаний з другим входом блоком розрахунку струму iq, перший вхід якого з'єднаний з виходом блока обмеження моменту, блок розрахунку струму id, перший вхід якого з'єднаний з виходом блока обмеження моменту, а другий вхід з виходом блока розрахунку потокозчеплення ротора, блок розрахунку кутової частоти ковзання, вхід якого з'єднаний з виходом блоку обмеження момент), а другий вхід і виходом блока розрахунку потокозчеплення ротора, блок компенсації перехресних зв'язків, другий вхід якого з'єднано з виходом датчика швидкості другого координатного перетворювача, перший та другий вхід якого з'єднано з виходами п'ятого та шостого суматора відповідно, третій вхід другого координатного перетворювача з'єднано з виходом інтегратора, вихід другого координатного перетворювача з'єднаний з входом блока широтно-імпульсної модуляції, вихід блока широтно-імпульсної модуляції з'єднаний з керуючими виходами автономного інвертора, випрямляч, який з'єднаний з входом ланки постійного струму, накопичувальний елемент, з'єднаний з виходом перетворювача постійної напруги, вхід якого з'єднаний з ланкою постійного струму через дросель та четвертий датчик струму, систему регулювання перетворювача постійної напруги, яка складається з задатчика напруги, вихід якого з'єднаний з першим входом сьомого суматора, другий вхід якого з'єднаний з виходом першого датчика напруги, який з'єднано з ємністю LCфільтра, вихід сьомого суматора з'єднаний з входом блока регулятора напруги, вихід якого з'єднаний з першим входом восьмого суматора, другий вхід якого з'єднаний з четвертим датчиком струму, вихід восьмого суматора з'єднаний з входом релейного регулятора, вихід якого з'єднаний з першим входом елемента блокування, другий вхід якого з'єднаний з блоком порівняння напруги, перший вхід якого з'єднаний з задавачем напруги, а другий вхід з другим датчиком напруги, який з'єднаний паралельно з накопичувальним елементом, вихід елемента блокування з'єднаний з керуючими виходами перетворювача постійної напруги. 9 UA 113689 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02P 21/10
Мітки: постійного, перетворювача, пристрій, струму, ланкою, накопичувачем, частоти, схемі, керування
Код посилання
<a href="https://ua.patents.su/12-113689-pristrijj-keruvannya-nakopichuvachem-v-skhemi-peretvoryuvacha-chastoti-z-lankoyu-postijjnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування накопичувачем в схемі перетворювача частоти з ланкою постійного струму</a>
Спосіб керування накопичувально-компенсуючим пристроєм в схемі перетворювача частоти з ланкою постійного струму
Номер патенту: 103507
Опубліковано: 25.12.2015
Автори: Слободенюк Дмитро Володимирович, Боркунов Віталій Сергійович, Бялобржеський Олексій Володимирович, Миколаєнко Юлія Олександрівна
МПК: H02P 21/00, B60L 7/10
Мітки: постійного, частоти, накопичувально-компенсуючим, спосіб, струму, ланкою, перетворювача, керування, пристроєм, схемі
Формула / Реферат:
Спосіб керування накопичувально-компенсуючим пристроєм в схемі перетворювача частоти з ланкою постійного струму, в якому управляють асинхронним двигуном шляхом регулювання вихідної напруги інвертора, що перетворює постійний струм у змінний для одержання заданого значення швидкості й керування швидкістю асинхронного двигуна, задають значення швидкості, контролюють фактичне значення швидкості, розраховують значення похибки швидкості шляхом...
Пристрій керування двигуном постійного струму з зворотним зв’язком по потужності
Номер патенту: 90590
Опубліковано: 10.06.2014
Автори: Шевченко Микола Якович, Кобилянський Борис Борисович, Семенець Дмитро Анатолійович
МПК: H02P 7/06, G05B 13/02
Мітки: пристрій, двигуном, зв'язком, струму, постійного, зворотним, керування, потужності
Формула / Реферат:
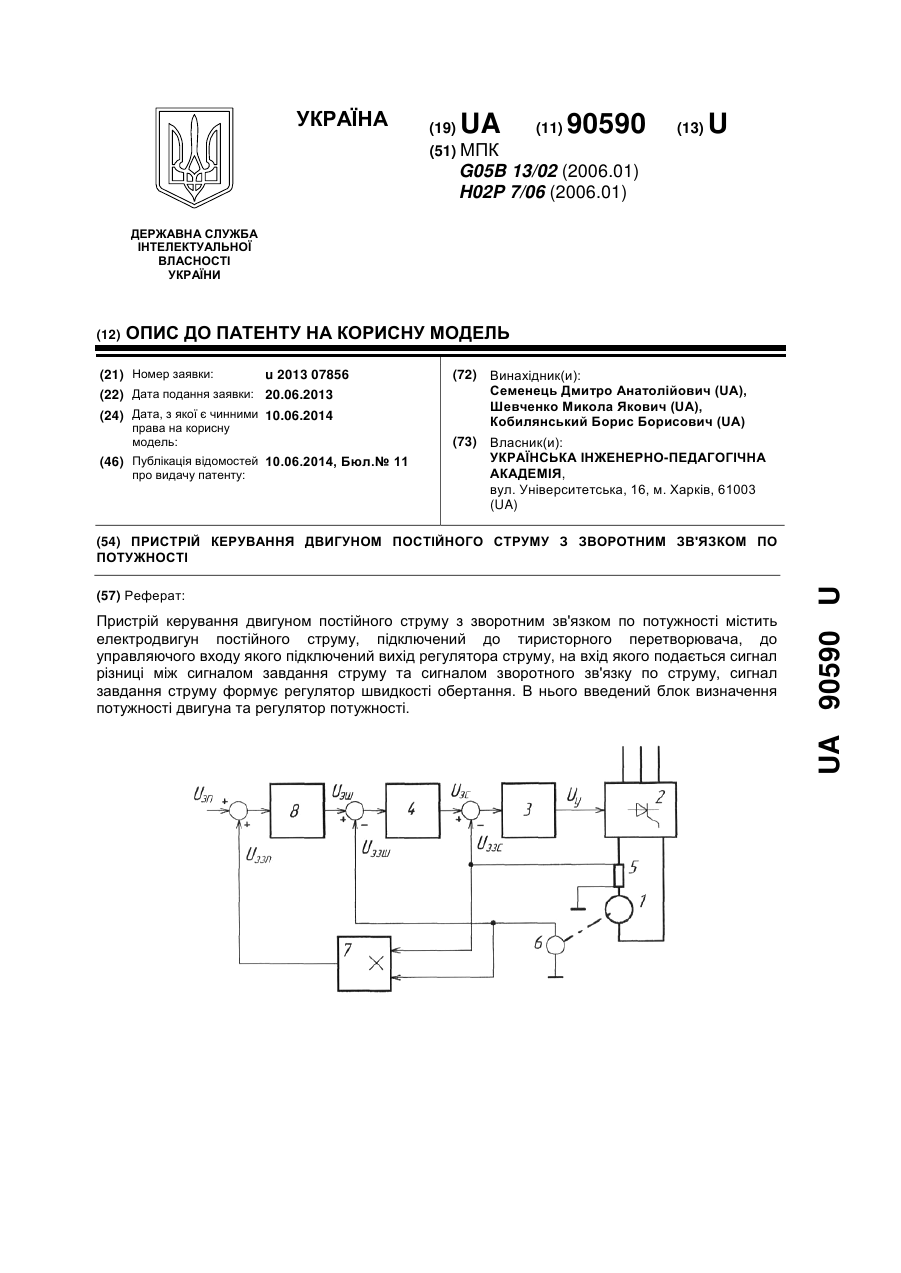
Пристрій керування двигуном постійного струму з зворотним зв'язком по потужності, який містить електродвигун постійного струму, підключений до тиристорного перетворювача, до управляючого входу якого підключений вихід регулятора струму, на вхід якого подається сигнал різниці між сигналом завдання струму та сигналом зворотного зв'язку по струму, сигнал завдання струму формує регулятор швидкості обертання, який відрізняється тим, що в нього...
Пристрій навантаження машини постійного струму незалежного збудження з ємнісним накопичувачем
Номер патенту: 82258
Опубліковано: 25.07.2013
Автори: Сулим Андрій Олександрович, Ломонос Андрій Іванович
МПК: H02K 15/00
Мітки: навантаження, незалежного, постійного, машини, ємнісним, струму, збудження, пристрій, накопичувачем
Формула / Реферат:
Пристрій навантаження машини постійного струму незалежного збудження з ємнісним накопичувачем, що містить силовий перетворювач, з'єднаний через датчик струму з якірним колом випробуваної машини, напруга якого контролюється датчиком напруги, керований транзисторний перетворювач, з'єднаний через датчик струму з колом обмотки збудження випробуваної машини, датчики струму якірного кола та частоти обертання випробуваної машини, мікроконтролер,...
Пристрій автоматичного керування рекуперативним гальмуванням електрорухомого складу постійного струму
Номер патенту: 70566
Опубліковано: 15.10.2004
Автор: Устименко Дмитро Володимирович
МПК: B60L 7/00, B60L 15/20
Мітки: складу, керування, рекуперативним, електрорухомого, постійного, гальмуванням, автоматичного, струму, пристрій
Формула / Реферат:
Пристрій автоматичного керування рекуперативним гальмуванням електрорухомого складу постійного струму, що містить статичний збудник, з'єднаний виходом з незалежною обмоткою збудження тягового двигуна, а входом - з широтно-імпульсним модулятором, до входу якого під'єднаний регулятор струму рекуперації, який відрізняється тим, що він має додатковий блок завдань і початкових умов та розв'язувальний блок, які з'єднані між собою послідовно, вихід...
Пристрій керування низьковольтним електродвигуном постійного струму середньої потужності
Номер патенту: 84349
Опубліковано: 10.10.2008
Автор: Семігін Яків Львович
МПК: H02K 15/00
Мітки: постійного, струму, потужності, середньої, керування, пристрій, низьковольтним, електродвигуном
Формула / Реферат:
Пристрій керування низьковольтним електродвигуном постійного струму середньої потужності, що містить перетворювач частоти в напругу та електродвигун, який відрізняється тим, що додатково містить блок живлення, блок керування, блок автоматичного гальмування та імпульсний датчик частоти обертання електродвигуна, при цьому вихід блока живлення сполучений з першим входом блока керування, перший вихід якого сполучений з входом блока автоматичного...
Попередній патент: Пристрій керування потоками потужності асинхронного генератора з компенсацією неактивних складових потужності мережі
Наступний патент: Спосіб монтажного вивіряння колони опорно-поворотного облаштування портального крана
Випадковий патент: Похідні заміщеного піролопіридинону, корисні як інгібітори фосфодіестерази