Іспитова електромеханічна система і спосіб керування нею
Номер патенту: 62488
Опубліковано: 15.12.2003
Автори: Прус В'ячеслав В'ячеславович, Бялобржеський Олексій Володимирович, Калашнік Сергій Степанович, Родькін Дмитро Йосипович, Величко Тетяна Володимирівна, Барвінок Дмитро Володимирович

Формула / Реферат
1. Іспитова електромеханічна система, що включає випробуваний двигун постійного струму з електромагнітною системою збудження, тиристорним реверсивним регулятором напруги в ланцюзі якоря й у ланцюзі збудження, системою датчиків струму якоря, струму збудження, напруги на якорі і швидкості обертання якоря, обчислювальний блок, аналогово-цифровий перетворювач з комутатором каналів на вході, цифро-аналоговим перетворювачем, яка відрізняється тим, що для розширення функціональних можливостей і інформативності вона додатково оснащена допоміжною магнітною електромагнітною системою збудження, підключеною на затискачі випробуваного двигуна, тиристорного регулятора ємнісного струму, підключеного до трифазної мережі на вході тиристорного реверсивного перетворювача в ланцюзі постійного струму, системами керування збудниками випробуваної і допоміжної машин постійного струму, системою регулювання тиристорним регулятором ємнісного струму, системою регулювання реверсивного перетворювача з незалежним керуванням вентилів кожного із шести тиристорів мостового реверсивного перетворювача, виходами контрольних ланок системи імпульсно-фазового керування по шести каналах, причому датчики постійного струму в ланцюгах якоря і ланцюга збудження випробуваного двигуна, якоря і обмотки збудження допоміжного двигуна, у фазі живильної енергосистеми, у фазі регулятора ємнісного струму, датчики напруги в якірних ланцюгах обох двигунів, датчики напруги в мережі змінної напруги, датчики швидкості двигунів, три датчики вібрацій випробуваного двигуна, з'єднані з входами комутатора, до якого підключені контрольні ланки системи імпульсно-фазового керування реверсивним тиристорним перетворювачем, керуючий вхід комутатора з'єднаний з виходом обчислювального блока, вихід комутатора зв'язаний із входом аналогово-цифрового перетворювача, зв'язаного своїм виходом із другим входом обчислювального блока, третій вихід якого з'єднаний з керованим мультиплексором, виходи якого зв'язані з блоками керування збудженням двигунів, тиристорного реверсивного перетворювача, регулятора ємнісного струму і комутуючого апарата в мережі живлення реверсивного перетворювача, комутуючих апаратів у ланцюзі реверсивного тиристорного перетворювача, якірного ланцюга допоміжного двигуна постійного струму.
2. Спосіб керування іспитовою електромеханічною системою полігармонійних керуючих впливів, що полягає у формуванні у ланцюгах керування випробуваного і допоміжного двигунів постійного струму, задаванні напруги керування реверсивного тиристорного перетворювача якірного ланцюга, швидкості двигуна, який відрізняється тим, що для розширення функціональних можливостей і підвищення достовірності визначення параметрів електромеханічної системи в реверсивному тиристорному перетворювачі якірного ланцюга, обладнаного системою керування з незалежним регулюванням кутів керування шести вентилів мостового перетворювача, установлюють різні кути керування в анодній і катодній групах перетворювача, встановлюють амплітуду третьої гармоніки напруги на виході на рівні заданої, задають постійну і змінну складові напруг керування тиристорного перетворювача якірного ланцюга випробуваного двигуна і ланцюга його збудження, вимірюють складові струмів гармонік, фіксують отримані значення, виконують операції діагностики параметрів електромеханічної системи.
3. Спосіб по пункту 2, який відрізняється тим, що для поліпшення енергетичних режимів і розширення діапазону регулювання навантаження змінюють струм збудження випробуваного і допоміжного двигунів, домагаються рівності нулю мінімального значення струму в силовому ланцюзі перетворювача якірного ланцюга, вимірюють напругу і якірний струм випробуваного двигуна, здійснюють діагностику параметрів електромеханічної системи, навантаження випробуваного двигуна.
4. Спосіб по пункту 2, який відрізняється тим, що для поліпшення енергетичних показників у ланцюзі змінного струму змінюють кути керування тиристорного перетворювача джерела ємнісного струму, домагаються симетрії струмів у фазах живильної мережі, змінюють амплітуди змінних складових струмів збудження випробуваного і допоміжного двигунів, навантажують випробуваний двигун протягом заданого часу заданим навантаженням.
5. Спосіб по пункту 2, який відрізняється тим, що для розширення функціональних можливостей і достовірності навантаження випробуваного двигуна моделюють технологічне навантаження для даного значення статичного моменту шляхом задання інтервалів часу розгону ![]() , часу сталого руху
, часу сталого руху ![]() , часу уповільнення
, часу уповільнення ![]() і паузи
і паузи ![]() , значення постійної швидкості
, значення постійної швидкості ![]() , визначають знакозмінні значення струму якоря на ділянках тахограми з залежностей:
, визначають знакозмінні значення струму якоря на ділянках тахограми з залежностей:
 ;
;
 ;
;
 ,
,
де ![]() - момент інерції досліджуваного двигуна;
- момент інерції досліджуваного двигуна; ![]() - момент холостого ходу;
- момент холостого ходу; ![]() - максимальна постійна складова швидкості;
- максимальна постійна складова швидкості; ![]() - змінна складова швидкості на кожній ділянці навантаження;
- змінна складова швидкості на кожній ділянці навантаження; ![]() - часові інтервали навантаження;
- часові інтервали навантаження; ![]() - коефіцієнт потоку збудження на кожній ділянці навантаження;
- коефіцієнт потоку збудження на кожній ділянці навантаження; ![]() - ефективне значення струму на
- ефективне значення струму на ![]() -ій ділянці навантаження,
-ій ділянці навантаження,
задані керуючі впливи в ланцюзі керування збудженням випробуваного і допоміжного двигунів підтримують струм випробуваного двигуна на заданому рівні на ділянках тахограми на рівні діючого значення, що дорівнює:
 ,
,
контролюють мінімальне значення струму навантаження перетворювача в ланцюзі якоря, підтримують його на рівні ![]() , навантажують двигун технологічним навантаженням протягом заданого часу.
, навантажують двигун технологічним навантаженням протягом заданого часу.
Текст
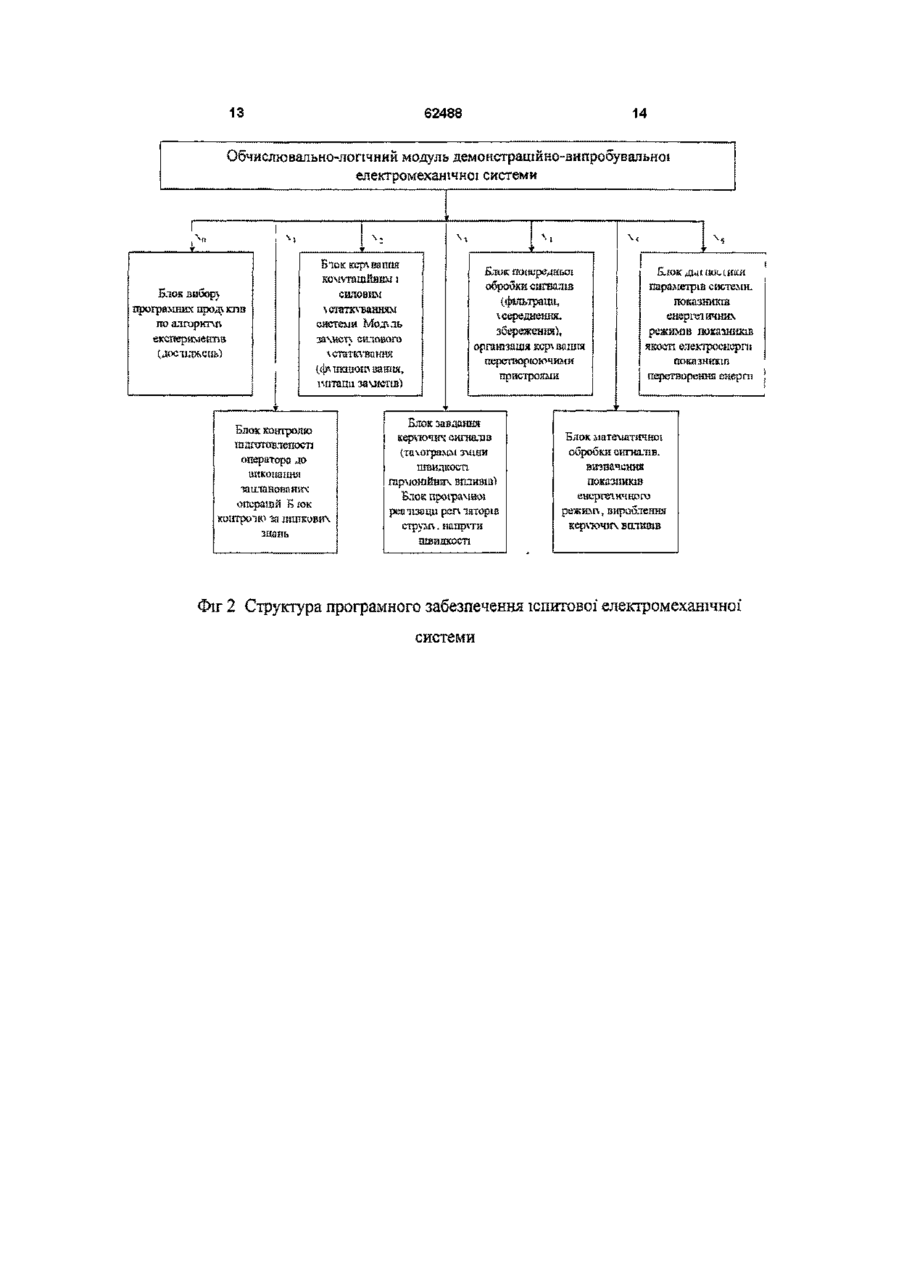
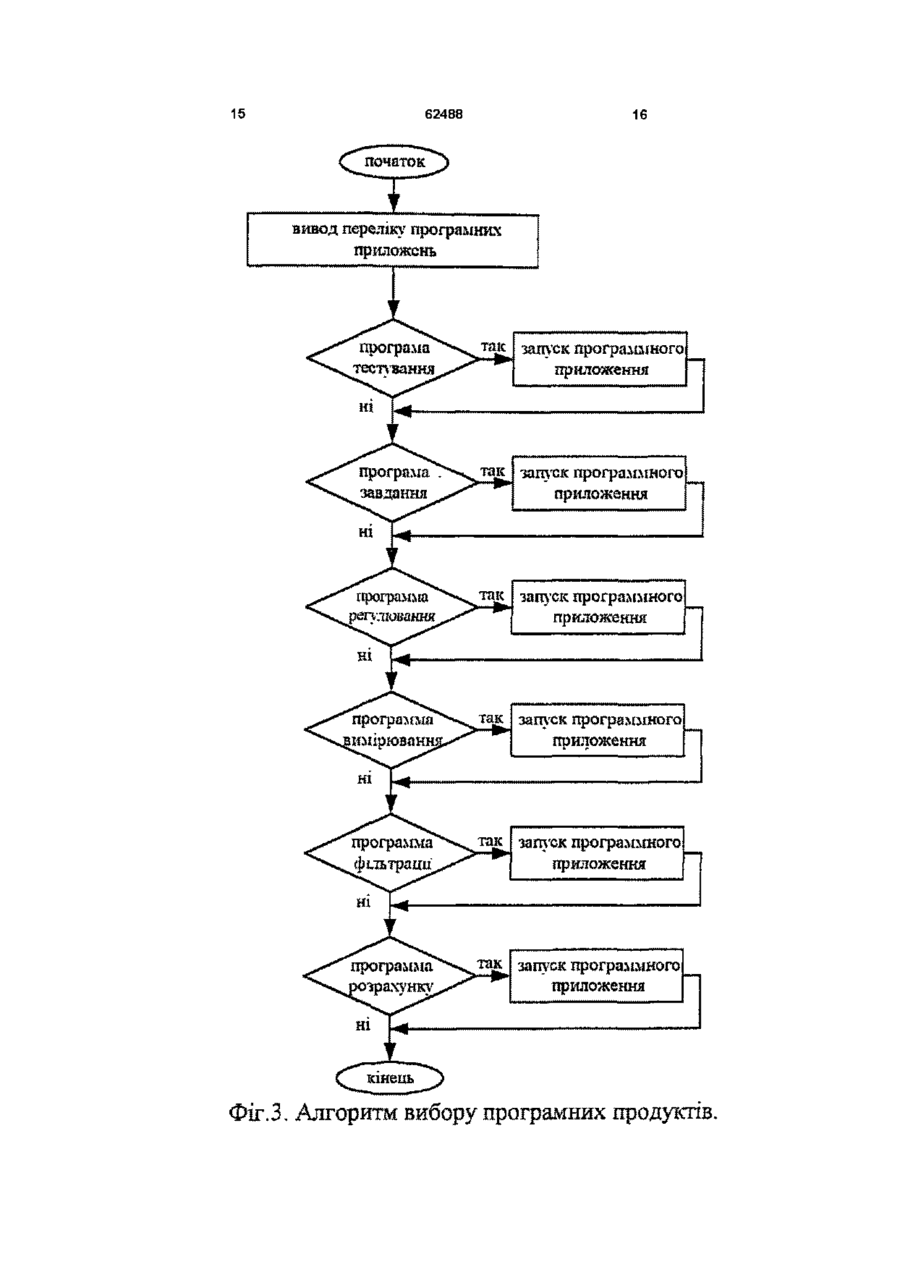
1 Іспитова електромеханічна система, що включає випробуваний двигун постійного струму з електромагнітною системою збудження, тиристорним реверсивним регулятором напруги в ланцюзі якоря й у ланцюзі збудження, системою датчиків струму якоря, струму збудження, напруги на якорі і швидкості обертання якоря, обчислювальний блок, аналогово-цифровий перетворювач з комутатором каналів на вході, цифро-аналоговим перетворювачем, яка відрізняється тим, що для розширення функціональних можливостей і інформативності вона додатково оснащена допоміжною магнітною електромагнітною системою збудження, підключеною на затискачі випробуваного двигуна, тиристорного регулятора ємнісного струму, підключеного до трифазної мережі на вході тиристорного реверсивного перетворювача в ланцюзі постійного струму, системами керування збудниками випробуваної і допоміжної машин постійного струму, системою регулювання тиристорним регулятором ємнісного струму, системою регулювання реверсивного перетворювача з незалежним керуванням вентилів кожного із шести тиристорів мостового реверсивного перетворювача, виходами контрольних ланок системи імпульсно-фазового керування по шести каналах, причому датчики постійного струму в ланцюгах якоря і ланцюга збудження випробуваного двигуна, якоря і обмотки збудження допоміжного двигуна, у фазі живильної енергосистеми, у фазі регулятора ємнісного струму, датчики напруги в якірних ланцюгах обох двигунів, датчики напруги в мережі змінної напруги, датчики швидкості двигунів, три датчики вібрацій випробуваного двигуна, з'єднані з входами комутатора, до якого підключені контрольні ланки системи імпульснофазового керування реверсивним тиристорним перетворювачем, керуючий вхід комутатора з'єд наний з виходом обчислювального блока, вихід комутатора зв'язаний із входом аналоговоцифрового перетворювача, зв'язаного своїм виходом із другим входом обчислювального блока, третій вихід якого з'єднаний з керованим мультиплексором, виходи якого зв'язані з блоками керування збудженням двигунів, тиристорного реверсивного перетворювача, регулятора ємнісного струму і комутуючого апарата в мережі живлення реверсивного перетворювача, комутуючих апаратів у ланцюзі реверсивного тиристорного перетворювача, якірного ланцюга допоміжного двигуна постійного струму 2 Спосіб керування іспитовою електромеханічною системою полігармонійних керуючих впливів, що полягає у формуванні у ланцюгах керування випробуваного і допоміжного двигунів постійного струму, задаванні напруги керування реверсивного тиристорного перетворювача якірного ланцюга, швидкості двигуна, який відрізняється тим, що для розширення функціональних можливостей і підвищення достовірності визначення параметрів електромеханічної системи в реверсивному тиристорному перетворювачі якірного ланцюга, обладнаного системою керування з незалежним регулюванням кутів керування шести вентилів мостового перетворювача, установлюють різні кути керування в анодній і катодній групах перетворювача, встановлюють амплітуду третьої гармоніки напруги на виході на рівні заданої, задають постійну і змінну складові напруг керування тиристорного перетворювача якірного ланцюга випробуваного двигуна і ланцюга його збудження, вимірюють складові струмів гармонік, фіксують отримані значення, виконують операції діагностики параметрів електромеханічної системи 3 Спосіб по пункту 2, який відрізняється тим, що для поліпшення енергетичних режимів і розширення діапазону регулювання навантаження змінюють струм збудження випробуваного і допоміжного двигунів, домагаються рівності нулю мінімального значення струму в силовому ланцюзі перетворювача якірного ланцюга, вимірюють напругу і якірний струм випробуваного двигуна, здійснюють діагностику параметрів електромеханічної системи, навантаження випробуваного двигуна 4 Спосіб по пункту 2, який відрізняється тим, що для поліпшення енергетичних показників у ланцюзі 00 00 (О 62488 змінного струму змінюють кути керування тиристорного перетворювача джерела ємнісного струму, домагаються симетрії струмів у фазах живильної мережі, змінюють амплітуди змінних складових струмів збудження випробуваного і допоміжного двигунів, навантажують випробуваний двигун протягом заданого часу заданим навантаженням 5 Спосіб по пункту 2, який відрізняється тим, що для розширення функціональних можливостей і достовірності навантаження випробуваного двигуна моделюють технологічне навантаження для даного значення статичного моменту шляхом задання інтервалів часу розгону t-|, часу сталого руху \.2, часу уповільнення t3 і паузи to, значення постійної швидкості сот , визначають знакозмінні значення струму якоря на ділянках тахограми з залежностей • , п dco m dt J 'з2 кФJ 'зі dco n2 dt dco пЗ dt де J - момент інерції досліджуваного двигуна, MQ - момент холостого ходу, сот - максимальна постійна складова швидкості, сопз - змінна складова швидкості на кожній ДІЛЯНЦІ навантаження, t часові інтервали навантаження, кФ, - коефіцієнт потоку збудження на кожній ДІЛЯНЦІ навантаження, І3, - ефективне значення струму на і-їй ДІЛЯНЦІ навантаження, задані керуючі впливи в ланцюзі керування збудженням випробуваного і допоміжного двигунів підтримують струм випробуваного двигуна на заданому рівні на ділянках тахограми на рівні діючого значення, що дорівнює dco n1,2,3 'E1,2,3 KOL J 4 42,3 dt кФ 1,2,3 контролюють мінімальне значення струму навантаження перетворювача в ланцюзі якоря, підтримують його на рівні IjдаО, навантажують двигун технологічним навантаженням протягом заданого часу -J •зз Винахід відноситься до електромеханіки, зокрема до систем іспиту електромеханічних машин у виробничих умовах, навчальних і наукових лабораторіях Системи подібного роду створюються безпосередньо для того чи іншого призначення, найчастіше вони являють собою спеціальні вироби У силу цього очевидна їхня функціональна обмеженість, тому що вони не можуть виступати як устаткування для наукових, навчальних лабораторій, спеціалізованих тренажерів і систем для навчання персоналу іспитових станцій різноманітного застосування Іспит електричних машин під навантаженням, як правило здійснюється при наявності двох електричних машин зв'язаних між собою механічно (за допомогою чи редуктора безпосередньо) Такі системи виявляються малоефективними, в умовах масового виробництва, ремонту електричних машин різного типономшалу Як наслідок виконуються розробки оптимальних способів навантаження, що відрізняються тим, що струмове і механічне навантаження створюються шляхом формування законів зміни живлячих напруг,, що веде до виникнення визначених процесів перерозподілу електричної і механічної енергій, у результаті чого якірний ланцюг генератора навантажується струмом, а конструкція піддається впливу механічних моментів і зусиль ВІДОМІ технічні рішення не мають, однак, широкого практичного застосування по ряду властивих їм недоліків Визначений крок у створенні іспитового устаткування для електричних машин промислового застосування при створенні систем динамічного навантаження, що відрізняються тим, що струмове і механічне навантаження створюються шляхом формування за допомогою спеціальних джерел живлення динамічних режимів, при яких у енергетичних процесах беруть участь основні компоненти перетворення електричної енергії живильна енергетична система, перетворюючий пристрій, електрична машина зі своїми електромагнітними контурами й обертовими масами Недолік систем динамічного навантаження в тім, що при реалізації динамічних режимів, енергетичних процесів знакозмінні складові миттєвої потужності попадають у мережу, приводячи до зниження якісних характеристик напруги живлення Це приводить до порушення нормального функціонування споживачів електроенергії найрізноманітнішого застосування Відомий спосіб навантаження двигунів постійного струму динамічним навантаженням (пат ГДР GOIR 31/34 № 216331, Спосіб перевірки під навантаженням двигуна постійного струму), здійснюваний шляхом підключення двигуна незалежного порушення до перетворювача частоти, формування напруги низької частоти, виміру струму якоря і напруги живлення, визначення діагностичних ознак за допомогою виміру кута повороту в одному й іншому напрямках обертання 62488 при ЗМІНІ полярності прикладеної напруги Модифікація цього методу включає установку моделі - двигуна постійного струму аналогічного випробуваної конструкції, фіксування навантажувальних параметрів випробуваного двигуна і моделі, порівняння отриманих результатів при встановлених для іспиту допусках Недоліками способу є на якір машини подається напруга, а не струм якоря, що є найважливішою діагностичною ознакою, струм і швидкість - навантажувальні параметри, що залежать від напруги, але в процесі навантаження не можуть бути сформовані так, як необхідно для створення режиму роботи з еквівалентними втратами близькими до номінального Відомий спосіб і пристрій не дозволяють видавати параметри навантажувального режиму, у пристрої, що реалізує спосіб необхідна фізична модель двигуна, що не завжди можливо, тому що при широкій номенклатурі машин, що ремонтуються, необхідний цілий парк таких моделей, при ЦИКЛІЧНІЙ ЗМІНІ напрямку обертання двигуна (із середнім значенням швидкості близьким до нуля) можливі такі частоти впливу, при яких колекторні пластини і якірні обмотки навантажуються струмом нерівномірно Очевидно, що достовірної діагностики параметрів двигуна при цьому не буде Відомий пристрій контролю температури вузлів електричної машини постійного струму (АС № 1229883 (51) МКИ Н02Н 5/04 «Пристрій для контролю температури електроустановки постійного струму»), у якому діагностика параметрів електричної машини здійснюється шляхом контролю температури струмоведучих частин машини, при її роботі під навантаженням за допомогою ВІДПОВІДНИХ датчиків струму При цьому ІНШІ параметри електричної машини не контролюються Таким чином, недоліком пристрою, є недостовірність процесу контролю температури, тому що температура машини визначається не тільки втратами енергії на омічному опорі струмоведучих частин машини Відомий спосіб навантаження двигунів постійного струму незалежного збудження, при якому в процесі навантаження задають ПОСТІЙНІ значення напруг якоря і струму збудження Для створення навантажувального режиму напругу збудження задають з деякою змінною складовою Динамічна складова струму якоря, при цьому, утвориться як частка змінної складової напруги живлення двигуна і комплексного опору ланцюга якоря (Спосіб навантаження двигунів постійного струму і пристрій для його здійснення АС СРСР, 1563410 G01R 31/34) Розглянутому способу притаманні недоліки частота періодичного впливу задається, а реакція двигуна на цей вплив визначається в ході експерименту, необхідне значення струму і швидкості підбираються в процесі навантаження шляхом зміни частоти й амплітуди періодичної складової напруги, залежності струму якоря і швидкості його обертання зв'язані один з одним, по цьому немає можливості створення таких навантажувальних ре жимів, при яких амплітуди, частоти і фази згаданих параметрів можна змінити друг щодо друга, при використанні відомого способу необхідно підбирати частоту впливу, що при визначеному сполученні з частотою обертання може викликати нерівномірне завантаження колекторних пластин і секцій обмоток якоря Відомо технічне рішення для створення струмового і механічного навантаження для двигуна постійного струму (Родькін Д Й , «Системи динамічного навантаження і діагностики електродвигунів при після ремонтних іспитах», М , Надра, с 243 (мал 11 1, crop 208)) Відоме технічне рішення має наступні недоліки при створенні динамічного навантаження змінна потужність циркулює між мережею і перетворювачем Вплив на ІНШІ споживачі при цьому настільки великий, що унеможливлює застосування пристроїв і систем обчислювальної техніки й інших автоматичних пристроїв, через значну знакозмінну потужність в ланцюзі двигуна постійного струму потужність перетворювача в ланцюзі якоря дорівнює чи перевищує потужність випробуваного двигуна Це унеможливлює застосування систем у мережах обмеженої потужності, характерних для електроремонтних підприємств, при роботі перетворюючих пристроїв, подібних тим, що живлять двигун у відомому пристрої, спектр вихідних напруг залежить від особливостей керування перетворювачем, числа фаз і способу керування перетворювачами Спектр гармонік напруги при цьому обмежений, що не дозволяє одержати достатню точність при діагностиці параметрів випробуваних двигунів, існуюче технічне рішення неможливе використовувати як тренажер для навчального персоналу при відсутності необхідної інформації про режими роботи основного устаткування системи, відомий пристрій не дозволяє реалізувати енергетичні процеси з метою визначення їхнього впливу на встановлену потужність устаткування, на якість напруги в живильній мережі та ш Усе відзначене говорить про обмежені функціональні можливості пристрою, недостатньої точності одержуваних результатів при діагностиці параметрів електромеханічного устаткування Зазначене технічне рішення приймається за прототип, у силу того, що має з заявленим загальні ознаки й операції двигун постійного струму з електромагнітною системою збудження підключається до силових перетворювачів для забезпечення регулювання напруги збудження і напруги якоря, напруга і струм ланцюгів якоря і збудження контролюються датчиками, контролюється швидкість обертання, рівень вібрацій машини контролюється датчиками, контроль стану датчиків здійснюється за допомогою аналого-цифрового перетворювача з комутатором каналів на вході, електроннообчислювальної машини, керування станом силових перетворюючих пристроїв здійснюється цифро-аналоговим перетворювачем по командах ЕОМ 62488 Ціль передбачуваного винаходу розширення функціональних можливостей і інформативності при проведені операцій діагностики параметрів електромеханічного устаткування Поставлена задача вирішується таким чином з метою зниження впливу системи динамічного навантаження на мережу додатково застосований ємнісно керований конденсатор, напруга і струм якого контролюється датчиками, для регулювання потоку енергії, що проходить через силовий перетворювач, додатково встановлена електрична машина - компенсатор, напруга і струм якої контролюються датчиками, для підвищення спектра гармонік напруги поданої на випробувану машину в систему додатково введена система імпульсно-фазового керування з формуванням спектра гармонік, для підвищення інформативності і керованості системи в цілому введені пристрої аналогоцифрового і цифро-аналогового перетворення й ЕОМ, алгоритм керування компенсатором і перетворюючими пристроями дозволяє реалізувати задані енергетичні процеси При цьому пропоноване технічне рішення відрізняється введенням додаткових пристроїв і послідовного виконання операцій у режимі навантаження до випробуваної машини підключається компенсаційна машина зміна э д с якої, за допомогою перетворення в ланцюзі збудження, домагаються зниження енергії минаючої через силовий перетворювач, при реалізації навантажувального режиму для зниження впливу на енергопостачальну мережу встановлений тиристорний ємнісний компенсатор, для забезпечення вихідної напруги якірного перетворювача з заданим гармонійним складом керування вентильними елементами здійснюється незалежно Докладно принцип функціонування системи можна пояснити наступними ілюстраціями Фіг 1 Блок-схема випробувальної електромеханічної системи Фіг 2 Структура програмного забезпечення іспитової електромеханічної системи Фіг 3 Алгоритм вибору програмних продуктів Фіг 4 Алгоритм реалізації контролю підготовленості оператора Фіг 5 Алгоритм керування комутаційним устаткуванням Фіг 6 Алгоритм завдання керуючих впливів Фіг 7 Алгоритм реалізації регуляторів Фіг 8 Алгоритм реалізації процедур обробки сигналів Фіг 9 Алгоритм реалізації математичної обробки даних Фіг 10 Алгоритм реалізації діагностики параметрів системи До складу іспитової електромеханічної системи (Фіг 1 ) входять досліджувана електрична машина 1, що послідовно із обмоткою 2 і датчиком струму 3 підключена до керованого перетворювача 4 Напруга якоря машини 1 контролюється датчиком 5, швидкість обертання - датчиком 6, рівень вібраційних параметрів - датчиками 7, 8, 9 Струм обмотки збудження 10 машини М1 регулюється 8 перетворювачем 11, і контролюється датчиком 12 Для компенсації електромагнітної інерції в ланцюзі збудження вхід перетворювача 12 з'єднаний з виходом регулятора струму збудження 13 Для зниження реактивної потужності, що протікає в системі можливе підключення електромашинного компенсатора 14 за допомогою керованого контактора 15, при цьому напруга і струм компенсатора контролюються датчиками 16 і 17 ВІДПОВІДНО, ШВИДКІСТЬ обертання компенсатора контролюється датчиком 18 Реалізація алгоритму компенсації припускає регулювання струму збудження обмотки 19 машини 14 для чого застосовується перетворювач 20, струм якого контролюється датчиком 21 Для зниження впливу електромагнітної інерції обмотки 19 керуючий вхід перетворювача 20 з'єднаний з регулятором 22 Формування заданого спектрального складу вихідної напруги перетворювача 4 здійснюється шляхом почергової комутації вентилів по сигналах керування блоку 23 стан вентилів контролюється по виходах 1-6 і сигнали надходять на входи 4-9 блоку аналого-цифрового перетворювача 24 Вхідна напруга і струм перетворювача контролюється датчиками 28 і 29 ВІДПОВІДНО СИЛОВИЙ ланцюг перетворювача підключається до мережі за допомогою керованого комутатора 31 по команді блоку цифро-аналогового перетворювача 27 Для компенсації впливу на мережу всієї системи живильна мережа перетворювача з'єднана пофазно з ємкісно-вентильним перетворювачем 32, 33, закон керування яким реалізується блоком 34 по сигналах з виходу 2 блоки 27 Тік компенсатора 32 контролюється датчиком ЗО сигнал з який надходить на вхід 1 блоку 24 Розподіл програмного забезпечення іспитової електромеханічної системи (Фіг 2 ) здійснюється в такий спосіб Весь пакет програмного забезпечення розподіляється на шістьох блоків, кожний з який призначений для реалізації заданих процедур, при проведенні всього комплексу ІСПИТІВ Операції по складанню комплексної програми для проведення експерименту починаються з визначення програмних продуктів необхідних для реалізації експерименту або дослідження (Хо) На даному етапі оператор визначає найбільш придатні для проведення робіт програмні продукти або їхні елементи розглянуті далі Потім, у залежності від роду виконуваного експерименту або дослідження, визначених програмне раніше, автоматично виконується набір підпрограм зв'язаних з контролем підготовленості оператора до виконання запланованих операцій (Хі) При цьому оператору треба буде пройти тест на знання застосовуваних логічних і математичних операцій, функціонування стенда і його елементів У випадку задовільного результату, що оцінюється автоматично по закладеній підпрограмі, оператор приступає до блоку формуванню керуючих функцій комутаційними елементами, що входять до складу стенда (Хг) При виконанні даних операцій, по ходу їхньої реалізації, додаткова підпрограма автоматично визначає правильність їхнього завдання, у випадку невірних дій попереджаючи оператора про збій у виконанні процедури Результатом роботи з даного блоку є зкомутована ВІДПОВІДНО ДО алгоритму схема Після ЧОГО (ХЗ) оператор формує із заданого набору чи функцій регуляторів, що керують функції або регулятори необхідні для виконання робіт При цьому пропонуються під блоки функцій часу, що можуть бути використані як керуючі, на думку оператора, на заданому інтервалі часу, наприклад A = A0-e '
ДивитисяДодаткова інформація
Назва патенту англійськоюTesting electromechanical system and method controlling by it
Автори англійськоюRodkin Dmytro Yosypovych, Velychko Tetiana Volodymyrivna, Bialobrezhskyi Oleksii Volodymyrovych, Barvinok Dmytro Volodymyrovych, Prus Viacheslav Viacheslavovych
Назва патенту російськоюИспытательная электромеханическая система и способ управления этой системой
Автори російськоюРодькин Дмитрий Иосифович, Величко Татьяна Владимировна, Бялобржеский Алексей Владимирович, Барвинок Дмитрий Владимирович, Прус Вячеслав Вячеславович
МПК / Мітки
МПК: G01R 31/34
Мітки: спосіб, іспитова, керування, система, нею, електромеханічна
Код посилання
<a href="https://ua.patents.su/12-62488-ispitova-elektromekhanichna-sistema-i-sposib-keruvannya-neyu.html" target="_blank" rel="follow" title="База патентів України">Іспитова електромеханічна система і спосіб керування нею</a>
Електромеханічна система паливоподачі
Номер патенту: 40452
Опубліковано: 16.07.2001
Автори: Ісаков Володимир Миколайович, Гресько Валентин Антонович, Ісаков Глеб Володимрович, Довготелес Григорій Арсентійович, Соловйов Олександр Олександрович, Удод Тарас Євгенович
МПК: F23K 3/00, H02P 27/04
Мітки: паливоподачі, електромеханічна, система
Формула / Реферат:
Електромеханічна система паливоподачі, яка містить накопичувальні бункери, на виході яких встановлені лопатеві пиложивильники з виконавчими електродвигунами, яка відрізняється тим, що виконавчий електродвигун кожного лопатевого пиложивильника виконаний за типом асинхронного двигуна з короткозамкнутим ротором, статорні обмотки якого підключені до виходу свого напівпровідникового перетворювача частоти, вхід якого приєднаний до мережі живлення,...
Електромеханічна система дозування хімреагентів
Номер патенту: 44615
Опубліковано: 15.02.2002
Автори: Вороновський Геннадій Кирилович, Ісаков Глеб Володимирович, Гресько Валентин Антонович, Ісаков Володимир Миколайович, Удод Тарас Євгенович
МПК: F22D 5/00, H02P 27/04
Мітки: хімреагентів, дозування, система, електромеханічна
Формула / Реферат:
Електромеханічна система дозування хімреагентів, яка містить насос-дозатор, вал якого під'єднаний до вала виконавчого асинхронного двигуна, на вхідний патрубок насоса-дозатора надходить з оперативної ємності дозований реагент, який з виходу насоса-дозатора транспортується в технологічну ємність або трубопровід з водою живлення, яка відрізняється тим, що статорні обмотки виконавчого асинхронного двигуна насоса-дозатора підключені до вихідних...
Система запуску синхронного двигуна групи г-д
Номер патенту: 36065
Опубліковано: 16.04.2001
Автори: Вошун Олексій Миколайович, Шварцман Ернст Володимирович, Пасмурских Олександр Олексійович, Долженко Віктор Володимирович, Родькін Дмитро Йосипович, Луговой Анатолій Васильович, Добрецов Володимир Валентинович, Чорний Олексій Петрович
МПК: H02P 7/06
Мітки: двигуна, система, г-д, синхронного, групи, запуску
Формула / Реферат:
Система запуску синхронного двигуна групи Г-Д, що включає синхронний двигун, тиристорний двигун, тиристорний перетворювач, генератор постійного струму із збуджувачем, контакторний апарат, що з'єднує якірний ланцюг генератора з тиристорним перетворювачем, яка відрізняється тим, що додатково обладнана датчиками напруги і струму тиристорного перетворювача, датчиком струму збудження генератора, обчислювальним блоком з чотирма входами, причому...
Електромеханічна система аксіально-радіальної конфігурації

Номер патенту: 49630
Опубліковано: 16.09.2002
Автори: Рясков Юрій Іванович, Афонін Анатолій Олексійович, Шайтор Микола Михайлович
МПК: H02K 19/02, H02K 19/16
Мітки: електромеханічна, конфігурації, система, аксіально-радіальної
Формула / Реферат:
Електромеханічна система аксіально-радіальної конфігурації, що містить на осі обертання жорстко закріплені роторні диски з феромагнітними вставками і жорстко зв'язані з корпусом статорні диски із співвісно концентрично розташованими індукторами і кільцевими електричними обмотками, яка відрізняється тим, що кожен з індукторів, що не містить проміжків уздовж периметрів обмоток, утворений фігурою, одержуваною співвісною установкою на кільце...
Система автоматизованого керування насосними агрегатами
Номер патенту: 45366
Опубліковано: 15.04.2002
Автори: СТЕЦКО МИХАЙЛО ГРИГОРОВИЧ, Шовкопляс Іван Петрович
МПК: G05D 9/00, F04D 15/00
Мітки: агрегатами, насосними, система, керування, автоматизованого
Формула / Реферат:
Система автоматизованого керування насосними агрегатами, яка складається з підключених до випрямлячів змінної напруги сигналів первинних перетворювачів рівня, підсилювачів постійного струму, входами з'єднаних з виходами випрямлячів змінної напруги сигналів, пристрою керування, входи якого з'єднані з виходами підсилювачів постійного струму, один з яких - для захисту від "сухого ходу", а також трансформаторів струму через схему...
Попередній патент: Апарат амро для черезкісткового остеосинтезу
Наступний патент: Демонстраційна модель насосної установки
Випадковий патент: Спосіб виробництва сталі