Спосіб енергетичного виявлення і оцінювання параметрів тривалого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою
Номер патенту: 93229
Опубліковано: 25.09.2014
Автори: Трофименко Юрій Валентинович, Пічугін Михайло Федорович, Борцова Марія Вікторівна, Карлов Дмитро Володимирович, Пєвцов Геннадій Володимирович, Яцуценко Анатолій Якович, Чернявський Олег Юрійович
Формула / Реферат
Спосіб енергетичного виявлення і оцінювання параметрів тривалого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою точністю, який ґрунтується на енергетичному виявленні інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення із заданою ймовірністю хибних тривог, суміш амплітуд тривалого немодульованого радіосигналу і шуму зрушується за фазою в діапазоні однозначності, з якої в кожному каналі формуються вибірки різної тривалості і розподіляються за каналами відповідної смуги доплерівських частот, складається з квадратурно зрушеними сукупностями амплітуд еталонних радіосигналів відповідної тривалості на середній частоті контрольованого діапазону з вирівняними початковими фазами за оцінкою модуля і знаку фази еталонних радіосигналів в широкосмуговому каналі з кроком, необхідним для однозначного квазіоптимального оцінювання, та подальшим оптимальним оцінюванням у квадратурному каналі з парним розподілом енергетичного відношення правдоподібності і дешифруванні відповідності фазового розподілу значень максимумів енергетичних відношень правдоподібності в усіх каналах оцінювання частоті вхідного тривалого немодульованого радіосигналу на кожній позиції та визначається різниця початкових фаз радіосигналів між основним та кутомірними радіоканалами для оцінювання кутового положення цілі і здійснюється уточнення частоти радіосигналу за сформованими з виявленої суміші сигналу і шуму псевдосигналами заданої тривалості при складанні їх з еталонними радіосигналами відповідної тривалості в діапазоні однозначних фазових зрушень вхідної реалізації з різними кроками дискректизації (квазіоптимальне і оптимальне уточнення доплерівської частоти) за енергетичним критерієм та дешифрування розподілів максимумів енергетичного відношення правдоподібності в діапазоні фазових зрушень вхідної реалізації в усіх каналах оцінювання частоті вхідного тривалого немодульованого радіосигналу, який відрізняється тим, що за оцінками дальності, частоти і кутового положення цілі на кожній позиції пасивної радіолокаційної системи, в умовах апріорної невизначеності несучої частоти, при ідентифікації вимірів одній цілі за часом, на загальному пункті обробки інформації із системи рівнянь в декартовій системі координат, отриманої на основі властивостей скалярного добутку повного вектора швидкості цілі і виражених його радіальних складових через оцінені частоти радіосигналів на кожній позиції, визначається несуча частота радіосигналу, модуль повного вектора швидкості цілі та його спрямовуючі косинуси у просторі із заданою можливою точністю.
Текст
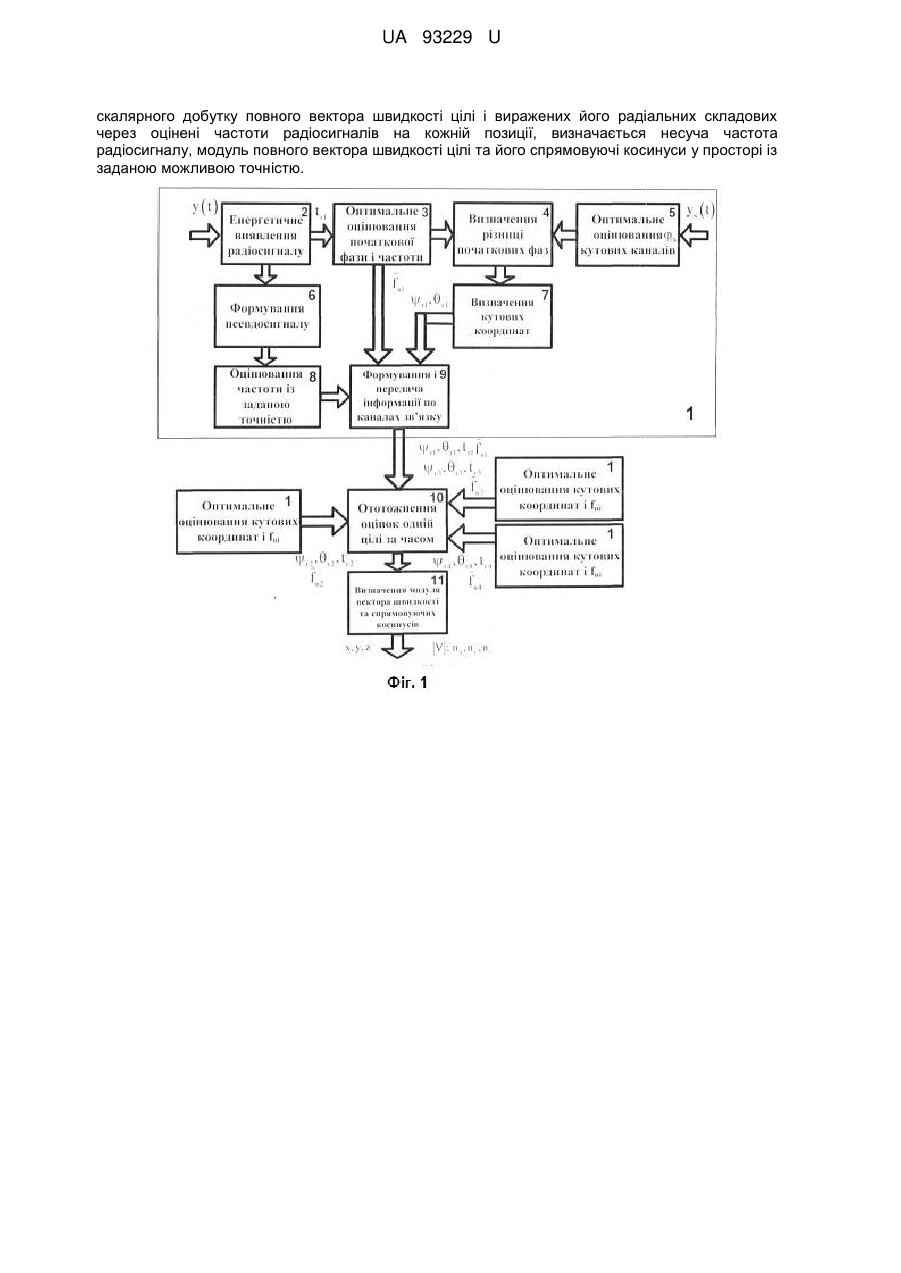
Реферат: Спосіб енергетичного виявлення і оцінювання параметрів тривалого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою точністю, який ґрунтується на енергетичному виявленні інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення із заданою ймовірністю хибних тривог, суміш амплітуд тривалого немодульованого радіосигналу і шуму зрушується за фазою в діапазоні однозначності, з якої в кожному каналі формуються вибірки різної тривалості і розподіляються за каналами відповідної смуги доплерівських частот, складається з квадратурно зрушеними сукупностями амплітуд еталонних радіосигналів відповідної тривалості на середній частоті контрольованого діапазону з вирівняними початковими фазами за оцінкою модуля і знаку фази еталонних радіосигналів в широкосмуговому каналі з кроком, необхідним для однозначного квазіоптимального оцінювання, та подальшим оптимальним оцінюванням у квадратурному каналі з парним розподілом енергетичного відношення правдоподібності і дешифруванні відповідності фазового розподілу значень максимумів енергетичних відношень правдоподібності в усіх каналах оцінювання частоті вхідного тривалого немодульованого радіосигналу на кожній позиції та визначається різниця початкових фаз радіосигналів між основним та кутомірними радіоканалами для оцінювання кутового положення цілі і здійснюється уточнення частоти радіосигналу за сформованими з виявленої суміші сигналу і шуму псевдосигналами заданої тривалості при складанні їх з еталонними радіосигналами відповідної тривалості в діапазоні однозначних фазових зрушень вхідної реалізації з різними кроками дискректизації (квазіоптимальне і оптимальне уточнення доплерівської частоти) за енергетичним критерієм та дешифрування розподілів максимумів енергетичного відношення правдоподібності в діапазоні фазових зрушень вхідної реалізації в усіх каналах оцінювання частоті вхідного тривалого немодульованого радіосигналу. За оцінками дальності, частоти і кутового положення цілі на кожній позиції пасивної радіолокаційної системи, в умовах апріорної невизначеності несучої частоти, при ідентифікації вимірів одній цілі за часом, на загальному пункті обробки інформації із системи рівнянь в декартовій системі координат, отриманої на основі властивостей UA 93229 U (12) UA 93229 U скалярного добутку повного вектора швидкості цілі і виражених його радіальних складових через оцінені частоти радіосигналів на кожній позиції, визначається несуча частота радіосигналу, модуль повного вектора швидкості цілі та його спрямовуючі косинуси у просторі із заданою можливою точністю. UA 93229 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до галузі радіотехніки і може бути використана в радіоприймальних пристроях систем радіолокації, радіонавігації, зв'язку та керування. Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є спосіб енергетичного виявлення тривалого немодульованого радіосигналу і послідовного оцінювання його початкової фази і допплерівської частоти з заданою можливою точністю [1], який ґрунтується на енергетичному виявленні інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення із заданою ймовірністю хибних тривог. Виявлена суміш амплітуд тривалого немодульованого радіосигналу і шуму зрушується за фазою в діапазоні однозначності, з якої формуються вибірки різної тривалості і розподіляються за каналами відповідної смуги допплерівських частот, складається з квадратурно зрушеними в діапазоні однозначних фазових затримок сукупностями амплітуд еталонних радіосигналів відповідної тривалості з вирівняними початковими фазами за оцінкою модуля і знаку фази еталонних радіосигналів в широкосмуговому каналі з кроком, необхідним для однозначного квазіоптимального оцінювання, та подальшим оптимальним оцінюванням у квадратурному каналі з парним розподілом енергетичного відношення правдоподібності і дешифруванні відповідності фазового розподілу значень максимумів енергетичних відношень правдоподібності в усіх каналах оцінювання допплерівській частоті вхідного тривалого немодульованого радіосигналу і утримує додатковий канал уточнення допплерівської частоти, в якому з виявленої суміші сигналу і шуму формуються псевдосигнали та здійснюється їх складання з еталонними радіосигналами відповідної тривалості в діапазоні однозначних фазових зрушень вхідної реалізації з різними кроками дискректизації (квазіоптимальне і оптимальне уточнення допплерівської частоти) за енергетичним критерієм та дешифрування розподілів максимумів енергетичного відношення правдоподібності в діапазоні фазових зрушень вхідної реалізації в усіх каналах оцінювання допплерівській частоті вхідного тривалого немодульованого радіосигналу із заданою можливою точністю. Недоліком способу-прототипу є те, що при використанні його в пасивній багатопозиційній радіолокаційній системі (БП РЛС) в умовах апріорної визначеності тривалості радіосигналу і невизначеності несучої частоти залишаються невідомими кутове положення та повний вектор швидкості цілі. В основу корисної моделі поставлена задача створити спосіб енергетичного виявлення і оцінювання параметрів тривалого немодульованого. радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення несучої частоти та повного вектора швидкості цілі із заданою можливою точністю. Поставлена задача вирішується за рахунок того, що з виявленої суміші сигналу і шуму формується послідовність більш тривалих радіосигналів, зрушених за фазою в діапазоні [0...2] з заданим кроком для попереднього квазіоптимального оцінювання. У кожному радіоканалі до фазозрушеної в діапазоні однозначності суміші радіосигналу і шуму додаються квадратурно зрушені, вирівняні за початковими фазами з вхідним радіосигналом, сукупності еталонних радіосигналів відповідної тривалості на частоті, що відповідає середньому значенню контрольованого діапазону. Вирівнювання початкових фаз виявленого, сформованого псевдосигналу та еталонних радіосигналів здійснюється за початковою фазою, що знайдена за першою короткою вибіркою в широкосмуговому каналі, розрахованому на смугу допплерівських частот об'єктів, що рухаються швидше відомих. Квазіоптимальне оцінювання частоти радіосигналу здійснюється за фазовими затримками максимуму енергетичного відношення правдоподібності у кожному частотному радіоканалі з парним розподілом в діапазоні фазових зрушень та подальшим оптимальним оцінюванням за рахунок зменшення кроку фазових затримок виявленого та псевдосигналів навколо квазіоптимальної оцінки. Розподіл максимумів енергетичних відношень правдоподібності в діапазоні фазових затримок вхідної суміші радіосигналу і шуму [...] , при складанні з еталонними радіосигналами кожного частотного радіоканалу, однозначно відповідає частоті виявленого радіосигналу з заданою можливою точністю. Оцінювання кутового положення цілі здійснюється за різницями початкових фаз радіосигналів між основним та кутомірними радіоканалами на декількох позиціях [2]. Визначаються координати цілі відомими способами (тріангуляційним або різничнодальномірним) за оцінками кутового положення цілі. За оцінками координат цілі, частоти радіосигналу на кожній позиції пасивної радіолокаційної системи в умовах апріорної невизначеності несучої частоти із системи рівнянь в декартовій системі координат, отриманої на основі властивостей скалярного добутку вектора швидкості цілі і оцінених його радіальних складових на кожній позиції, визначається несуча частота, модуль 1 UA 93229 U 5 10 повного вектора швидкості цілі та його спрямовуючі косинуси у просторі із заданою можливою точністю. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у тому, що на основі оцінювання енергетичного відношення правдоподібності на інтервалі існування псевдосигналу, утвореного з тривалого немодульованого радіосигналу, уточнюється його частота за максимальним значенням енергетичного відношення правдоподібності із заданою можливою точністю на кожній позиції пасивної БП РЛС. За значеннями оцінок координат та частоти радіосигналу на кожній позиції визначаються несуча частота радіосигналів, модуль повного вектора швидкості цілі та його спрямовуючі косинуси у просторі із заданою можливою точністю. На фіг. 1 приведений алгоритм запропонованого способу. На фіг. 2 приведені однозначні залежності енергетичного відношення правдоподібності для допплерівської частоти fd 565432 ,757 Гц в радіоканалах при різних тривалостях радіосигналів для амплітуд радіосигналу as 1, еталонного сигналу і еквівалентної амплітуди шуму 15 aet nek 10 при співпадінні частоти еталонного радіосигналу з несучою частотою вхідного радіосигналу fet 0 в діапазоні однозначних фазових затримок суміші сигналу і шуму. На фіг. 3 приведені однозначні залежності енергетичного відношення правдоподібності для допплерівської частоти fd 565432 ,757 Гц в радіоканалах при різних тривалостях радіосигналів для амплітуд радіосигналу as 1, еталонного сигналу і еквівалентної амплітуди шуму 20 aet nek 10 при неспівпадінні частоти еталонного радіосигналу з несучою частотою вхідного радіосигналу на величину fet 7777777 Гц в діапазоні однозначних фазових затримок суміші сигналу і шуму. На фіг. 4 приведена однозначна залежність величини відносної максимальної помилки визначення модуля повного вектора швидкості цілі для пасивної БП РЛС від азимутальної 25 орієнтації вектора швидкості цілі при помилці пеленгування i i 1 і максимальній помилці визначення частоти радіосигналу на кожній позиції f 0,777 Гц при тріангуляційному 30 методі пеленгації (штрихова лінія) і в умовах відомої з помилкою 0,25 площини випромінювання зондуючого радіосигналу (суцільна лінія). На фіг. 5 приведена однозначна залежність максимальної величини кута відхилення між вирахуваним і істинним положенням вектора швидкості цілі від азимутальної орієнтації вектора швидкості цілі при помилці пеленгування i i 1 і максимальній помилці визначення частоти радіосигналу на кожній позиції f 0,777 Гц при тріангуляційному методі пеленгації 35 (штрихова лінія) і в умовах відомої з помилкою 0,25 площини випромінювання зондуючого радіосигналу (суцільна лінія). На фіг. 6 приведена однозначна залежність відносної величини максимальної помилки визначення частоти зондуючого сигналу для пасивної БП РЛС від азимутальної орієнтації вектора швидкості цілі при помилці пеленгування i i 1 і максимальній помилці визначення частоти радіосигналу на кожній позиції f 0,777 Гц при тріангуляційному методі 40 пеленгації (штрихова лінія) і в умовах відомої з помилкою 0,25 площини випромінювання зондуючого радіосигналу (суцільна лінія). На фіг. 7 приведена однозначна залежність величини відносної максимальної помилки визначення модуля повного вектора швидкості цілі для пасивної БП РЛС від азимутальної орієнтації вектора швидкості цілі при помилці пеленгування i i 0,1 і максимальній помилці визначення частоти радіосигналу на кожній позиції f 0,777 Гц при тріангуляційному 45 50 методі пеленгації (штрихова лінія) і в умовах відомої з помилкою 0,25 площини випромінювання зондуючого радіосигналу (суцільна лінія). На фіг. 8 приведена однозначна залежність максимальної величини кута відхилення між вирахуваним і істинним положенням вектора швидкості цілі від азимутальної орієнтації вектора швидкості цілі при помилці пеленгування i i 0,1 і максимальній помилці визначення частоти радіосигналу на кожній позиції f 0,777 Гц при тріангуляційному методі пеленгації 2 UA 93229 U (штрихова лінія) і в умовах відомої з помилкою 0,25 площини випромінювання зондуючого радіосигналу (суцільна лінія). На фіг. 9 приведена однозначна залежність відносної величини максимальної помилки визначення частоти зондуючого сигналу для пасивної БП РЛС від азимутальної орієнтації 5 10 15 20 25 30 35 40 45 50 вектора швидкості цілі при помилці пеленгування i i 0,1 і максимальній помилці визначення частоти радіосигналу на кожній позиції f 0,777 Гц при тріангуляційному методі пеленгації (штрихова лінія) і в умовах відомої з помилкою 0,25 площини випромінювання зондуючого радіосигналу (суцільна лінія). Сутність запропонованого способу енергетичного виявлення і оцінювання параметрів тривалого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою точністю (фіг. 1) полягає у тому, що після енергетичного виявлення інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення із заданою ймовірністю хибних тривог 2, суміш амплітуд тривалого немодульованого радіосигналу і шуму розподіляється між основним каналом оцінювання частоти 3 і додатковим каналом формування псевдосигналу 6. У кожному з каналів сигнал і псевдосигнал в діапазоні однозначних фазових зсувів вхідної реалізації [0...2] поділяються на інтервали різної тривалості і складаються з сукупністю квадратурно зрушених еталонних очікуваних радіосигналів таких же тривалостей на частоті, що відповідає середньому значенню контрольованого діапазону. Сукупність еталонних очікуваних радіосигналів в радіоканалі оцінювання початкової фази формується на основі апріорних відомостей про діапазон очікуваних частот з використанням його середнього значення. Вирівнювання початкових фаз прийнятого і визначених еталонних квадратурно зрушених радіосигналів в радіоканалах оцінювання частоти здійснюється за оцінкою модуля фази, пропорційною відношенню різниці енергетичних відношень правдоподібності при синфазному складанні та оптимально оціненому до різниці енергетичних відношень правдоподібності при синфазному і протифазному складанні контрольних і еталонних радіосигналів в широкосмуговому квадратурному каналі з парним розподілом енергетичного відношення правдоподібності, розрахованому на смугу допплерівських частот об'єктів, що рухаються з великими швидкостями за межею відомих: L Lв им , (1) 0 мах Lмах Lмin () де Lмах - максимальне значення енергетичного відношення правдоподібності при синфазному складанні радіосигналів з оціненими і відомими амплітудами за контрольним радіосигналом; Lмin () - мінімальне значення енергетичного відношення правдоподібності при протифазному складанні радіосигналів з оціненими і відомими амплітудами за контрольним радіосигналом; Lв им - оцінене значення енергетичного відношення правдоподібності при складанні вхідної реалізації з еталонними радіосигналами з оціненими і відомими амплітудами в квадратурному каналі з парним розподілом енергетичного відношення правдоподібності. Знак і модуль початкової фази еталонного радіосигналу оцінюється за розташуванням максимуму енергетичного відношення правдоподібності у парному квадратурному каналі в залежності від фазових зрушень еталонного радіосигналу. За оцінкою початкової фази формуються еталонні радіосигнали для кожного частотного каналу для квазіоптимального x ет 2 cos; x ет 2 sin та оптимального x ет 3 cos оцінювання. Після складання амплітуд суміші радіосигналу, внутрішнього шуму і сформованого псевдосигналу з еталонними радіосигналами оцінюється енергетичне відношення правдоподібності для всіх еталонних радіосигналів радіоканалів і формується матриця енергетичних відношень правдоподібності. За критерієм максимуму енергетичного відношення правдоподібності приймається рішення про квазіоптимальну оцінку допплерівської частоти радіосигналу. Параметри квазіоптимального оцінювання є вхідними даними для формування еталонних радіосигналів для більш точного оцінювання x ет 3 cos у тому числі і для псевдосигналів різної тривалості. Еталонні радіосигнали складаються зі значеннями виявленої суміші радіосигналу та внутрішнього шуму і визначається матриця енергетичних відношень правдоподібності в діапазоні фазових зрушень вхідної виявленої суміші з меншим кроком дискретизації. Результат дешифрування відповідності 3 UA 93229 U 5 фазового розподілу максимумів енергетичних відношень правдоподібності в усіх каналах оцінювання частоті вхідного радіосигналу і є оцінкою частоти тривалого немодульованого радіосигналу із заданою можливою точністю (фіг. 2, 3). Кутові координати відповідають різниці початкових фаз основного і кутомірного каналів 4,7 (фіг. 1). Для фазового метода радіопеленгації кутові координати , визначаються виразами [2]: L arctg 2 , L 1 10 15 20 25 (2) 2 2 arccos 2L 2L , 1 2 де L1 , L 2 - бази між основною і азимутальною та кутомісцевою антенами; , - значення різниць початкових фаз між основною і азимутальною та кутомісцевою антенами; - довжина хвилі радіосигналу. Для усунення неоднозначності оцінки використовується двобазовий метод вимірювань різниці початкових фаз в кутомірних каналах. Пеленги на ціль в прямокутовій системі координат: n xi cos i cos i (3) n y i sin i cos i , n sin i zi де i i - азимут і кут місця пеленгу на ціль в сферичній системі координат. Здійснюється ототожнення оцінок координат на загальній позиції за часом затримки і визначаються координати цілі відомими способами (тріангуляційним або різничнимдальномірним) 10. Надлишок інформації використовується для підвищення точності оцінювання координат цілі. У місцевій декартовій системі координат із системи рівнянь оцінюється несуча частота виявленого радіосигналу, модуль повного вектора швидкості цілі і його спрямовуючі косинуси 11 (фіг. 1). Система рівнянь в координатній формі, що дозволяє визначити спрямовуючі косинуси вектора швидкості цілі n x , n y , n z , його модуль та несучу частоту f0 випромінюваного радіосигналу, має вигляд: Vr1 V(n xn x1 n yn y1 n zn z1); Vr 2 V(n xn x 2 n yn y 2 n zn z2 ); V V(n n n n n n ); (4) x x3 y y3 z z3 r3 Vr 4 V(n xn x 4 n yn y 4 n zn z 4 ); 2 n x n2 n2 1. y z Значення модулів радіальних складових вектора швидкості цілі Vn визначаються через виміряні значення частоти fв1, fв2, fв3 , fв4 на кожному пункті і значення невідомої несучої частоти f0 випромінюваного радіосигналу: cf c cf c Vr 4 в4 ; Vr1 в1 ; 2f0 2 2f0 2 cfв3 c cfв2 c Vr 2 ; Vr 3 ; 2f0 2 2f0 2 де c - швидкість світла. В системі рівнянь відомими величинами є спрямовуючі косинуси n xi, n y i, nzi пеленгів на ціль 30 з кожної позиції і оцінені частоти fв1, fв2, fв3 , fв4 , а невідомими - спрямовуючі косинуси вектора швидкості цілі n x , n y , n z , модуль вектора швидкості цілі V та несуча частота прийнятого радіосигналу f0 на кожній позиції. Система рівнянь (4) має точне рішення. Із рішення системи рівнянь (4) слідує значення несучої частоти прийнятих радіосигналів: 4 UA 93229 U a a5 , (6) f0 3 a 4 a6 де b a0 ; c a0 ; b a c a a3 0 a 4 1 1 ; a5 0 a6 1 1 ; b2 a2 b2 a2 c 2 a2 c 2 a2 cf 2nz3 cfв2 2nz2 cf 2nz 4 cfв1 2nz1 cf 2nz2 cfв1 2nz1 a0 в 4 ; b0 в3 ; c 0 в2 ; n y 4 nz 4 n y1 nz1 n y 3 n z3 n y 2 n z 2 n y 2 nz2 n y1 nz1 a1 5 c 2nz3 c 2nz2 c 2nz 4 c 2nz1 c 2nz2 c 2nz1 ; b1 ; c1 ; n y0 nz 4 n y1 nz1 n y 3 n z3 n y 2 n z 2 n y 2 nz2 n y1 nz1 n n n x 2 nz2 n n n x1 nz1 n n n x1 nz1 a2 x 4 z 4 ; b 2 x 3 z3 ; c 2 x 2 z2 . n y 4 nz 4 n y1 nz1 n y 3 n z3 n y 2 n z 2 n y 2 nz2 n y1 nz1 Спрямовуючі косинуси вектора швидкості цілі визначаються виразами: nx де My y Mx M x , nz z z , (7) , ny V V V n x 4 n y 4 nz 4 nr 4 n y 4 nz4 1 n x1 n y1 nz1 ; x nr1 n y1 nz1 ; V n x 2 n y 2 nz2 nr 2 n y 2 nz2 n x 4 nr 4 nz 4 n x 4 n y 4 nr 4 1 1 n x1 nr1 nz1 ; z n x1 n y1 nr1 . V V n x 2 nr 2 nz2 n x 2 n y 2 nr 2 Модуль вектора швидкості визначається за умови нормування спрямовуючих косинусів y 10 n2 n2 n2 1: x y z V 15 20 25 Mx 2 My 2 2 Mz 2 , (8) де M x , M y , Mz - детермінанти відповідних матриць. Якісні показники оцінювання повного вектора швидкості цілі: відносна помилка визначення модуля повного вектора швидкості цілі, як відношення різниці між вирахуваною швидкістю цілі при заданих помилках і заданою швидкістю до цієї ж швидкості цілі (фіг. 4, 7): V Vв V , (9) V V кут відхилення просторової орієнтації вирахуваного значення вектора швидкості цілі від істинного напрямку польоту цілі (фіг. 5, 8): arccos(nxnхв nynyв nznzв ), (10) де n xв , n yв , nzв - спрямовуючі косинуси визначеного вектора швидкості цілі при урахуванні всіх помилок, що характеризують процес його визначення. Відносна максимальна помилка визначення несучої частоти сигналу як відношення різниці між розрахованою частотою і істинною до істинного значення частоти f0 (фіг. 6, 9): f f0p f0 (11) , f0 f0 де f0 - розраховане значення несучої частоти сигналу, що випромінюється ціллю. Джерела інформації: 1. Патент на корисну модель № 86646. Україна, МПК G01S 7/34. Спосіб енергетичного виявлення тривалого немодульованого радіосигналу і послідовного оцінювання його початкової фази і допплерівської частоти із заданою можливою точністю / Г.В. Певцов, А.Я. Яцуценко та ін. - № u 2013 07336; заявл. 10.06.2013; опубл. 10.01.2014, Бюл. №1. 5 UA 93229 U 2. Патент на корисну модель № 86649. Україна, МПК G01S 7/34. Спосіб енергетичного виявлення коротких немодульованих радіосигналів і послідовного оцінювання їх початкових фаз і допплерівських частот та різниці фаз між основним та кутомірними каналами /Г.В. Певцов, А.Я. Яцуценко та ін. - № u 2013 07339; заявл. 10.06.2013; опубл. 10.01.2014, Бюл. № 1. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 30 35 Спосіб енергетичного виявлення і оцінювання параметрів тривалого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою точністю, який ґрунтується на енергетичному виявленні інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення із заданою ймовірністю хибних тривог, суміш амплітуд тривалого немодульованого радіосигналу і шуму зрушується за фазою в діапазоні однозначності, з якої в кожному каналі формуються вибірки різної тривалості і розподіляються за каналами відповідної смуги доплерівських частот, складається з квадратурно зрушеними сукупностями амплітуд еталонних радіосигналів відповідної тривалості на середній частоті контрольованого діапазону з вирівняними початковими фазами за оцінкою модуля і знаку фази еталонних радіосигналів в широкосмуговому каналі з кроком, необхідним для однозначного квазіоптимального оцінювання, та подальшим оптимальним оцінюванням у квадратурному каналі з парним розподілом енергетичного відношення правдоподібності і дешифруванні відповідності фазового розподілу значень максимумів енергетичних відношень правдоподібності в усіх каналах оцінювання частоті вхідного тривалого немодульованого радіосигналу на кожній позиції та визначається різниця початкових фаз радіосигналів між основним та кутомірними радіоканалами для оцінювання кутового положення цілі і здійснюється уточнення частоти радіосигналу за сформованими з виявленої суміші сигналу і шуму псевдосигналами заданої тривалості при складанні їх з еталонними радіосигналами відповідної тривалості в діапазоні однозначних фазових зрушень вхідної реалізації з різними кроками дискректизації (квазіоптимальне і оптимальне уточнення доплерівської частоти) за енергетичним критерієм та дешифрування розподілів максимумів енергетичного відношення правдоподібності в діапазоні фазових зрушень вхідної реалізації в усіх каналах оцінювання частоті вхідного тривалого немодульованого радіосигналу, який відрізняється тим, що за оцінками дальності, частоти і кутового положення цілі на кожній позиції пасивної радіолокаційної системи, в умовах апріорної невизначеності несучої частоти, при ідентифікації вимірів одній цілі за часом, на загальному пункті обробки інформації із системи рівнянь в декартовій системі координат, отриманої на основі властивостей скалярного добутку повного вектора швидкості цілі і виражених його радіальних складових через оцінені частоти радіосигналів на кожній позиції, визначається несуча частота радіосигналу, модуль повного вектора швидкості цілі та його спрямовуючі косинуси у просторі із заданою можливою точністю. 6 UA 93229 U 7 UA 93229 U 8 UA 93229 U 9 UA 93229 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори англійськоюPevtsov Hennadii Volodymyrovych, Yatsutsenko Anatolii Yakovych, Trofymenko Yurii Valentynovych, Karlov Dmytro Volodymyrovych
Автори російськоюПевцов Геннадий Владимирович, Яцуценко Анатолий Яковлевич, Трофименко Юрий Валентинович, Карлов Дмитрий Владимирович
МПК / Мітки
МПК: G01S 7/34
Мітки: вектора, заданою, радіосигналу, енергетичного, радіолокаційний, визначення, швидкості, цілі, параметрів, оцінювання, виявлення, повного, тривалого, немодульованого, багатопозиційний, пасивний, системі, можливою, спосіб
Код посилання
<a href="https://ua.patents.su/12-93229-sposib-energetichnogo-viyavlennya-i-ocinyuvannya-parametriv-trivalogo-nemodulovanogo-radiosignalu-v-pasivnijj-bagatopozicijjnijj-radiolokacijjnijj-sistemi-ta-viznachennya-povnogo-v.html" target="_blank" rel="follow" title="База патентів України">Спосіб енергетичного виявлення і оцінювання параметрів тривалого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою</a>
Спосіб енергетичного виявлення і оцінювання параметрів короткого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою
Номер патенту: 91077
Опубліковано: 25.06.2014
Автори: Кухарський Ігор Андрійович, Яцуценко Анатолій Якович, Пєвцов Геннадій Володимирович, Пічугін Михайло Федорович, Трофименко Юрій Валентинович, Карлов Дмитро Володимирович, Борцова Марія Вікторівна
МПК: G01S 7/34
Мітки: системі, радіолокаційний, багатопозиційний, енергетичного, вектора, повного, пасивний, немодульованого, параметрів, заданою, цілі, швидкості, можливою, короткого, виявлення, спосіб, оцінювання, радіосигналу, визначення
Формула / Реферат:
Спосіб енергетичного виявлення і оцінювання параметрів короткого немодульованого радіосигналу в пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою точністю, який ґрунтується на перевірці статистичних гіпотез за критерієм мінімуму середнього ризику і використовує енергетичне відношення правдоподібності для виявлення інтервалу часу, де енергетичне відношення правдоподібності...
Спосіб енергетичного виявлення і оцінювання параметрів тривалого немодульованого радіосигналу в активно-пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою
Номер патенту: 92420
Опубліковано: 11.08.2014
Автори: Яцуценко Анатолій Якович, Пічугін Михайло Федорович, Пєвцов Геннадій Володимирович, Трофименко Юрій Валентинович, Чернявський Олег Юрійович, Карлов Дмитро Володимирович, Борцова Марія Вікторівна
МПК: G01S 7/34
Мітки: спосіб, швидкості, параметрів, немодульованого, заданою, вектора, системі, виявлення, радіолокаційний, активно-пасивній, цілі, тривалого, повного, оцінювання, визначення, радіосигналу, багатопозиційний, енергетичного
Формула / Реферат:
Спосіб енергетичного виявлення і оцінювання параметрів тривалого немодульованого радіосигналу в активно-пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою точністю, який ґрунтується на енергетичному виявленні інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення із заданою ймовірністю хибних тривог, суміш амплітуд тривалого немодульованого...
Спосіб енергетичного виявлення і оцінювання параметрів короткого немодульованого радіосигналу в активно-пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою
Номер патенту: 91080
Опубліковано: 25.06.2014
Автори: Борцова Марія Вікторівна, Трофименко Юрій Валентинович, Пічугін Михайло Федорович, Карлов Дмитро Володимирович, Пєвцов Геннадій Володимирович, Яцуценко Анатолій Якович, Чуб Сергій Вікторович
МПК: G01S 7/34
Мітки: визначення, заданою, активно-пасивній, виявлення, оцінювання, вектора, швидкості, енергетичного, спосіб, повного, параметрів, радіолокаційний, цілі, короткого, радіосигналу, немодульованого, багатопозиційний, системі
Формула / Реферат:
Спосіб енергетичного виявлення і оцінювання параметрів короткого немодульованого радіосигналу в активно-пасивній багатопозиційній радіолокаційній системі та визначення повного вектора швидкості цілі із заданою можливою точністю, який ґрунтується на перевірці статистичних гіпотез за критерієм мінімуму середнього ризику і використовує енергетичне відношення правдоподібності для виявлення інтервалу часу, де енергетичне відношення...
Спосіб енергетичного виявлення тривалого немодульованого радіосигналу і послідовного оцінювання його початкової фази і доплерівської частоти із заданою можливою точністю
Номер патенту: 86646
Опубліковано: 10.01.2014
Автори: Карлов Дмитро Володимирович, Чернявський Олег Юрійович, Чуб Сергій Вікторович, Трофименко Юрій Валентинович, Борцова Марія Вікторівна, Пєвцов Геннадій Володимирович, Пічугін Михайло Федорович, Яцуценко Анатолій Якович
МПК: G01S 7/34
Мітки: доплерівської, спосіб, початкової, радіосигналу, заданою, тривалого, немодульованого, частоти, виявлення, точністю, енергетичного, можливою, фазі, оцінювання, послідовного
Формула / Реферат:
Спосіб енергетичного виявлення тривалого немодульованого радіосигналу і послідовного оцінювання його початкової фази і доплерівської частоти з заданою можливою точністю, який ґрунтується на енергетичному виявленні інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення із заданою ймовірністю хибних тривог, суміш амплітуд тривалого немодульованого радіосигналу і шуму, з якої формуються вибірки різної тривалості і...
Спосіб енергетичного виявлення короткого немодульованого радіосигналу і послідовного оцінювання його початкової фази і доплерівської частоти із заданою можливою точністю
Номер патенту: 86648
Опубліковано: 10.01.2014
Автори: Пєвцов Геннадій Володимирович, Кухарський Ігор Андрійович, Чернявський Олег Юрійович, Пічугін Михайло Федорович, Карлов Дмитро Володимирович, Борцова Марія Вікторівна, Яцуценко Анатолій Якович, Трофименко Юрій Валентинович
МПК: G01S 7/34
Мітки: спосіб, фазі, заданою, оцінювання, точністю, частоти, доплерівської, виявлення, короткого, початкової, послідовного, немодульованого, енергетичного, радіосигналу, можливою
Формула / Реферат:
Спосіб енергетичного виявлення короткого немодульованого радіосигналу і послідовного оцінювання його початкової фази і доплерівської частоти з заданою можливою точністю, який ґрунтується на перевірці статистичних гіпотез за критерієм мінімуму середнього ризику і використовує енергетичне відношення правдоподібності для виявлення інтервалу часу, де енергетичне відношення правдоподібності перевищує поріг виявлення з заданою ймовірністю хибних...
Попередній патент: Спосіб отримання “нанополіолефінів” – нанокомпозитів поліолефінів та співполімерів поліолефінів
Наступний патент: Спосіб збагачення магнітосприйнятливої сировини
Випадковий патент: Спосіб підвищення продуктивності шовковичного шовкопряда