Система моніторингу підстрибування висівних секцій (варіанти)
Формула / Реферат
1. Система сільськогосподарського знаряддя, яка містить:
множину висівних секцій, кожна з яких виконана з можливістю внесення насіння в ґрунт; і
датчик підстрибування, жорстко з'єднаний з щонайменше однією висівною секцією і виконаний з можливістю видачі сигналу, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію щонайменше однієї висівної секції.
2. Система за п. 1, яка містить електронний блок керування, виконаний з можливістю прийому даних від мережевого сенсорного інтерфейсу, при цьому датчик підстрибування виконаний з можливістю видачі сигналу, що вказує підстрибування, в мережевий сенсорний інтерфейс.
3. Система за п. 2, в якій кожна висівна секція містить:
насіннєпровід, виконаний з можливістю спрямування насіння в ґрунт; і
датчик насіння, який розташований поруч з насіннєпроводом, при цьому датчик насіння виконаний з можливістю моніторингу витрати насіння через насіннєпровід і видачі сигналу в електронний блок керування через мережевий сенсорний інтерфейс, що вказує витрату насіння.
4. Система за п. 2, в якій електронний блок керування виконаний з можливістю видачі сигналу в контролер буксирувального транспортного засобу, що вказує підстрибування.
5. Система за п. 1, в якій датчик підстрибування являє собою акселерометр.
6. Система за п. 1, яка містить множину датчиків підстрибування, при цьому кожен датчик підстрибування жорстко з'єднаний з кожною висівною секцією.
7. Система за п. 6, яка містить електронний блок керування, виконаний з можливістю прийому даних від кожного датчика підстрибування і обчислення середньої величини підстрибування, середнього напрямку підстрибування або їх комбінації.
8. Система сільськогосподарського знаряддя, яка містить:
висівну секцію з датчиком підстрибування, виконаним з можливістю моніторингу витрати насіння і видачі першого сигналу через мережевий сенсорний інтерфейс, що вказує витрату насіння;
датчик підстрибування, виконаний з можливістю видачі другого сигналу через мережевий сенсорний інтерфейс, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію, системи сільськогосподарського знаряддя; і
електронний блок керування, виконаний з можливістю прийому першого сигналу і другого сигналу з мережевого сенсорного інтерфейсу і визначення величини підстрибування, напрямку підстрибування або їх комбінації, на основі другого сигналу.
9. Система за п. 8, в якій датчик підстрибування жорстко з'єднаний з висівною секцією.
10. Система за п. 8, в якій електронний блок керування виконаний з можливістю видачі третього сигналу в контролер буксирувального транспортного засобу, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію.
11. Система за п. 8, яка містить корпус, встановлений на насіннєпроводі висівної секції, при цьому корпус вміщує датчик насіння і датчик підстрибування.
12. Система за п. 8, яка містить множину висівних секцій, кожна з яких має датчик насіння, при цьому кожен датчик насіння виконаний з можливістю видачі першого сигналу через мережевий сенсорний інтерфейс.
13. Система за п. 12, яка містить множину датчиків підстрибування, при цьому кожен датчик підстрибування жорстко з'єднаний з кожною висівною секцією, причому кожен датчик підстрибування виконаний з можливістю видачі другого сигналу через мережевий сенсорний інтерфейс.
14. Система за п. 12, яка містить шину, виконану з можливістю передачі першого сигналу і другого сигналу з мережевого сенсорного інтерфейсу в електронний блок керування.
15. Система за п. 8, в якій датчик підстрибування являє собою акселерометр.
16. Система сільськогосподарського знаряддя, яка містить:
множину висівних секцій, кожна з яких має датчик насіння, виконаний з можливістю моніторингу витрати насіння і видачі першого сигналу через мережевий сенсорний інтерфейс, що вказує витрату насіння;
датчик підстрибування, жорстко з'єднаний зі щонайменше однією висівною секцією, при цьому датчик підстрибування виконаний з можливістю видачі другого сигналу через мережевий сенсорний інтерфейс, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію щонайменше однієї висівної секції; і
електронний блок керування, виконаний з можливістю прийому першого сигналу і другого сигналу з мережевого сенсорного інтерфейсу і визначення величини підстрибування, напрямку підстрибування або їх комбінації на основі другого сигналу.
17. Система за п. 16, яка містить множину датчиків підстрибування, кожен з яких жорстко з'єднаний з кожною висівною секцією.
18. Система за п. 17, яка містить множину корпусів, кожен з яких встановлений на насіннєпроводі кожної висівній секції, при цьому кожен корпус вміщає датчик насіння і датчик підстрибування.
19. Система за п. 16, яка містить шину, виконану з можливістю передачі першого сигналу і другого сигналу з мережевого сенсорного інтерфейсу в електронний блок керування.
20. Система за п. 16, в якій електронний блок керування виконаний з можливістю видачі третього сигналу в контролер буксирувального транспортного засобу, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію.
Текст
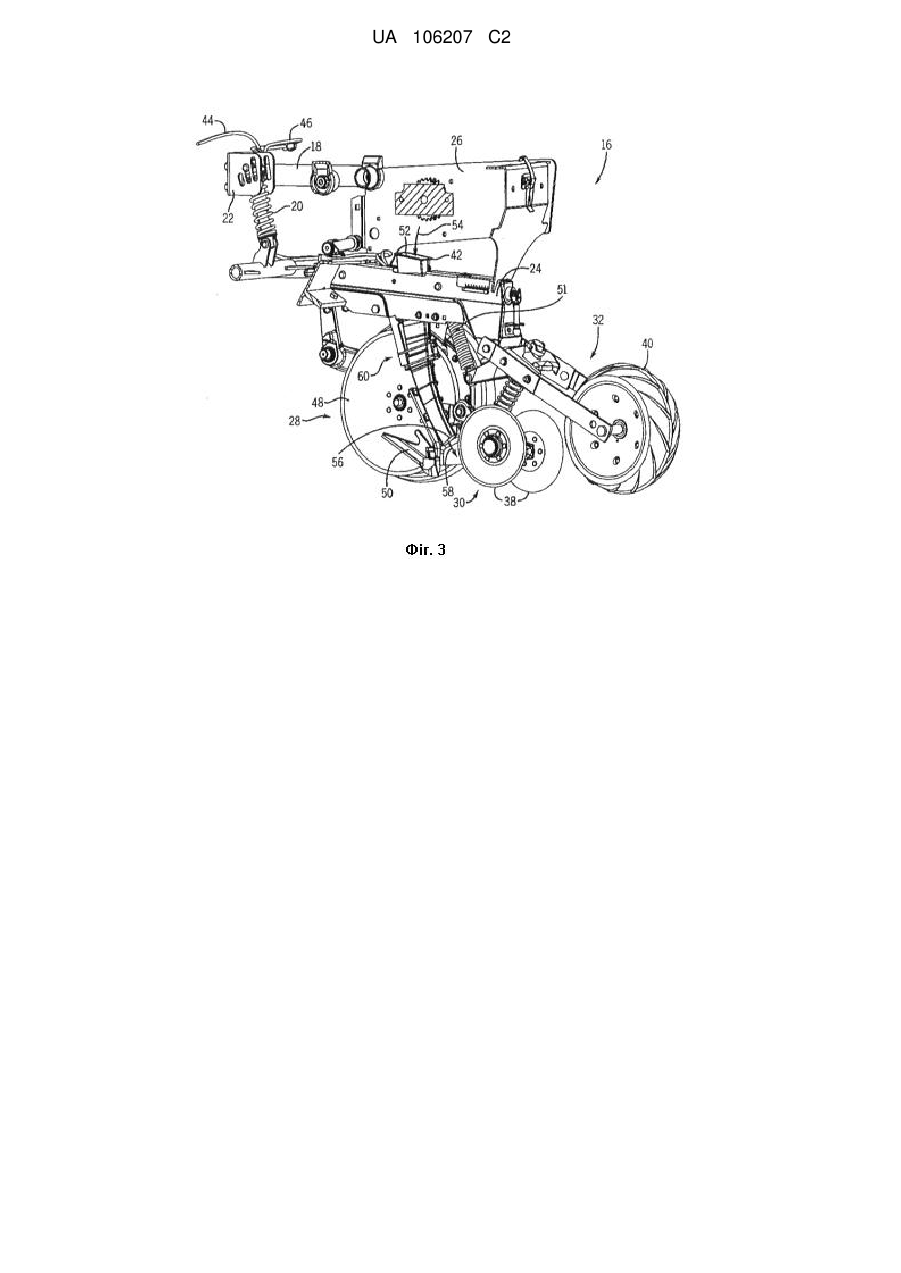
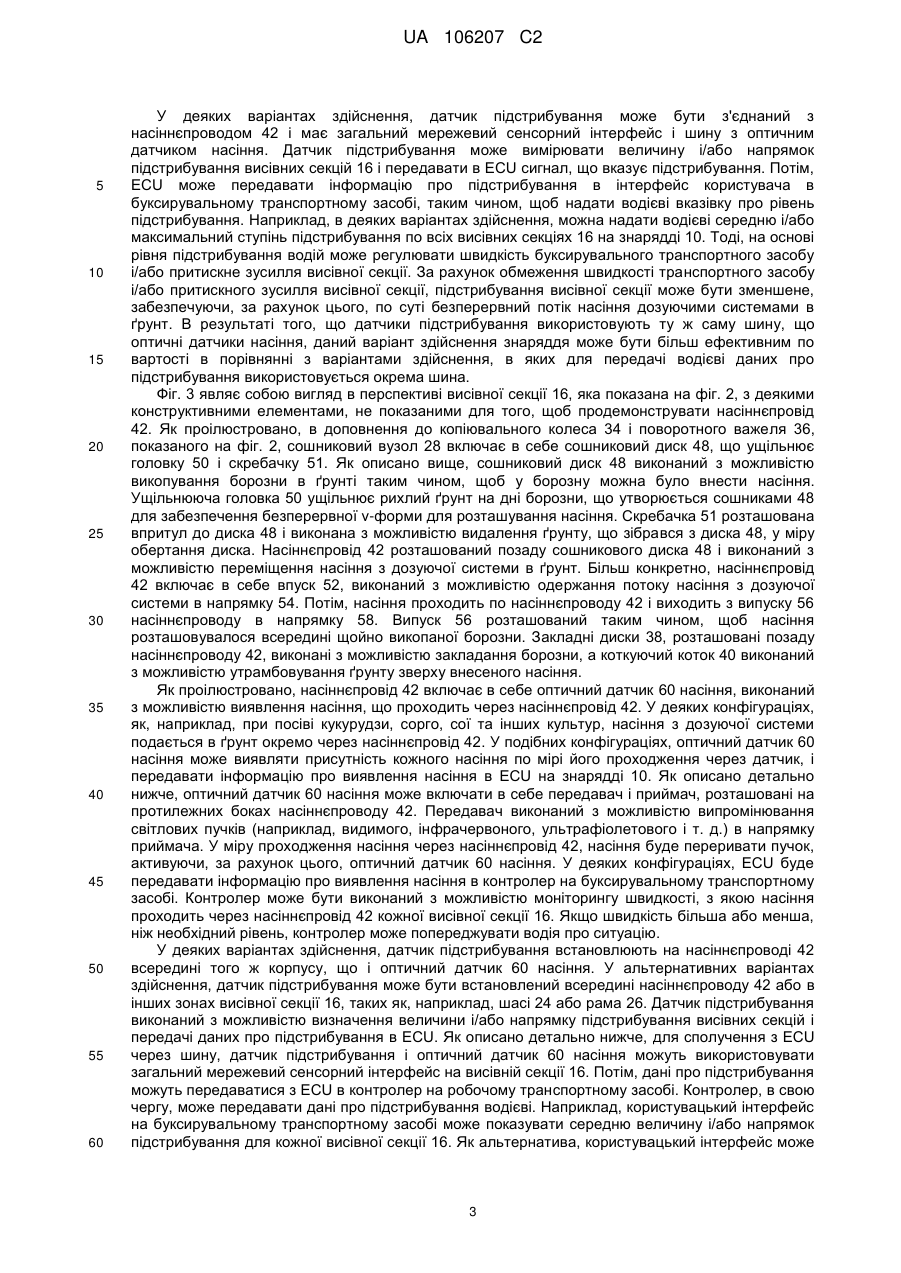
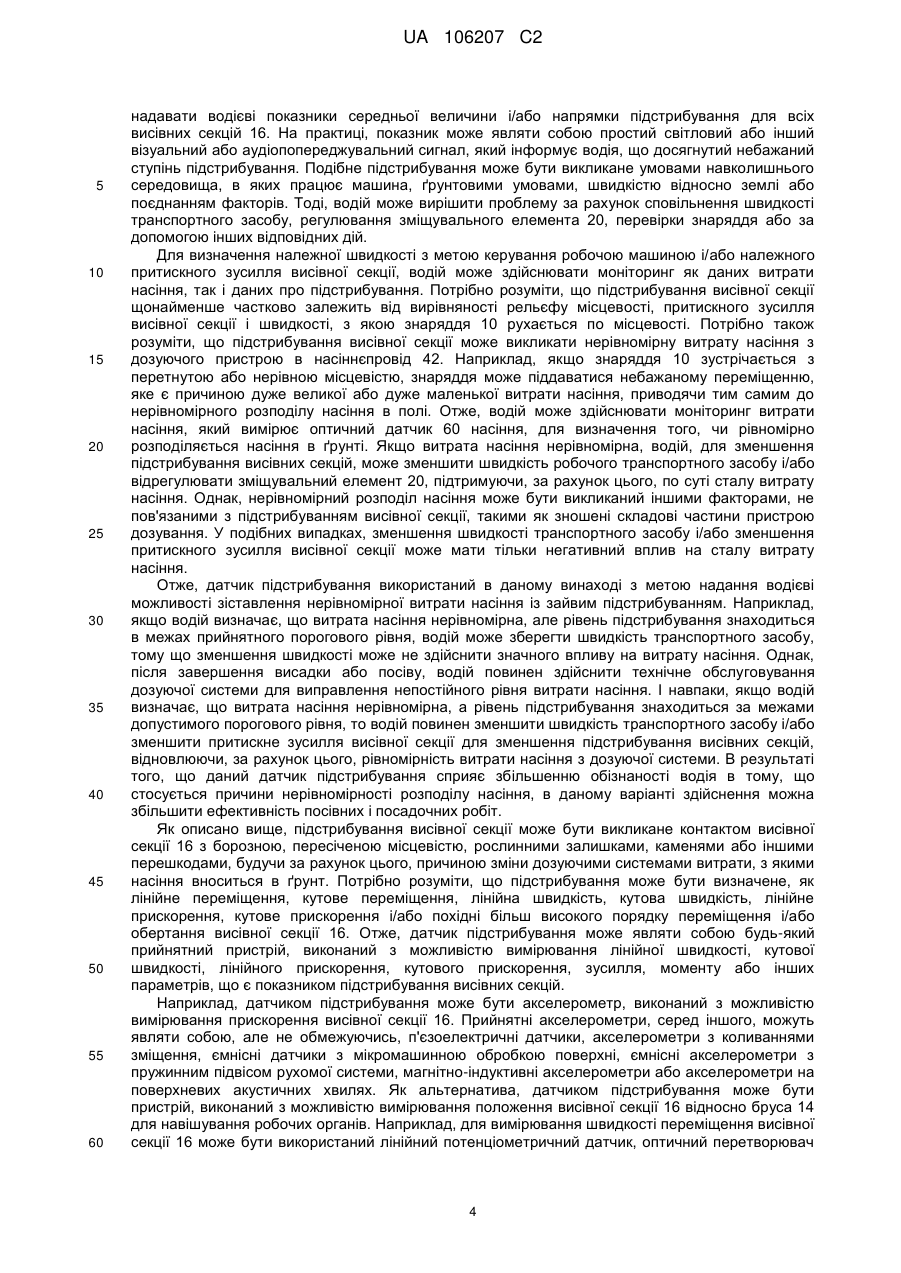
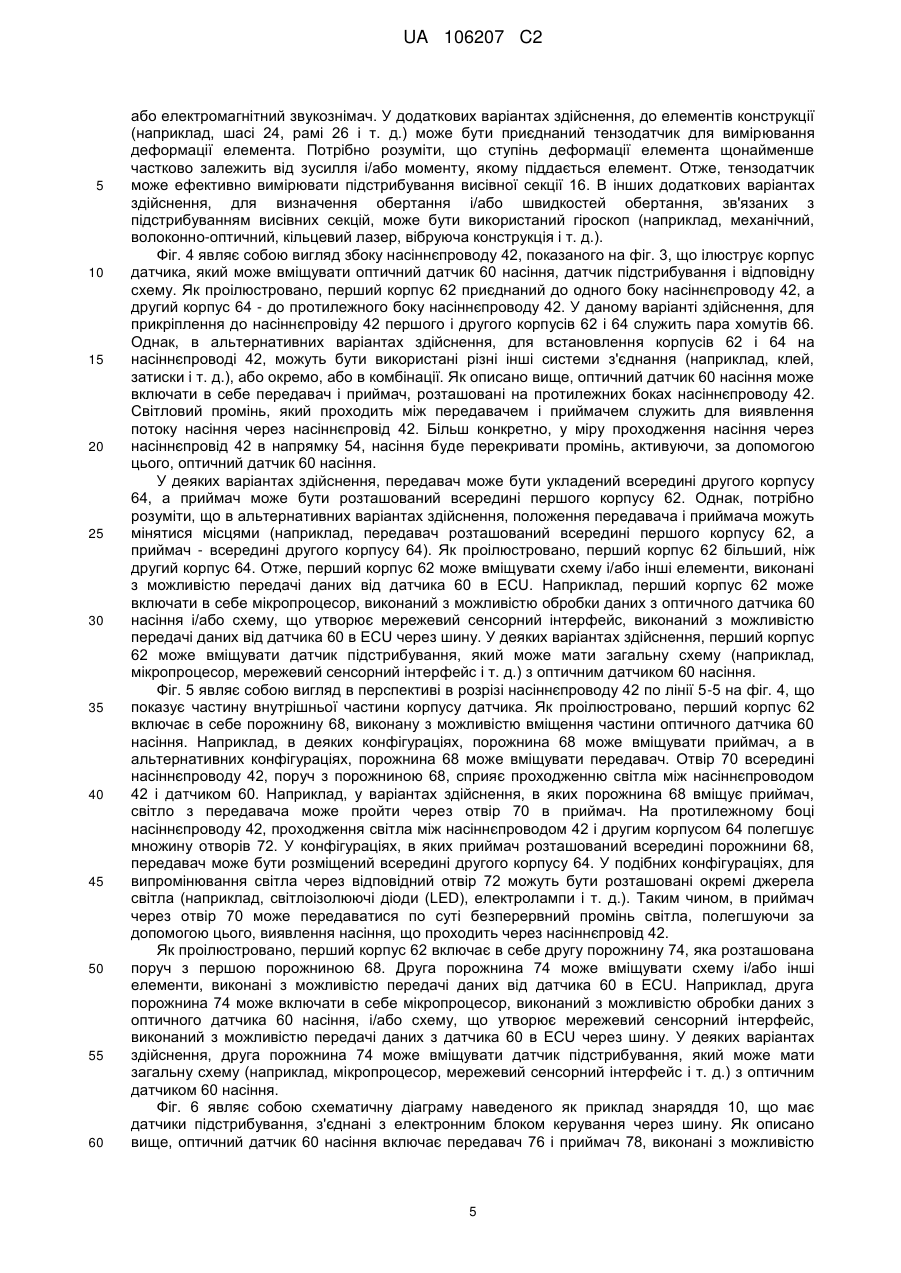
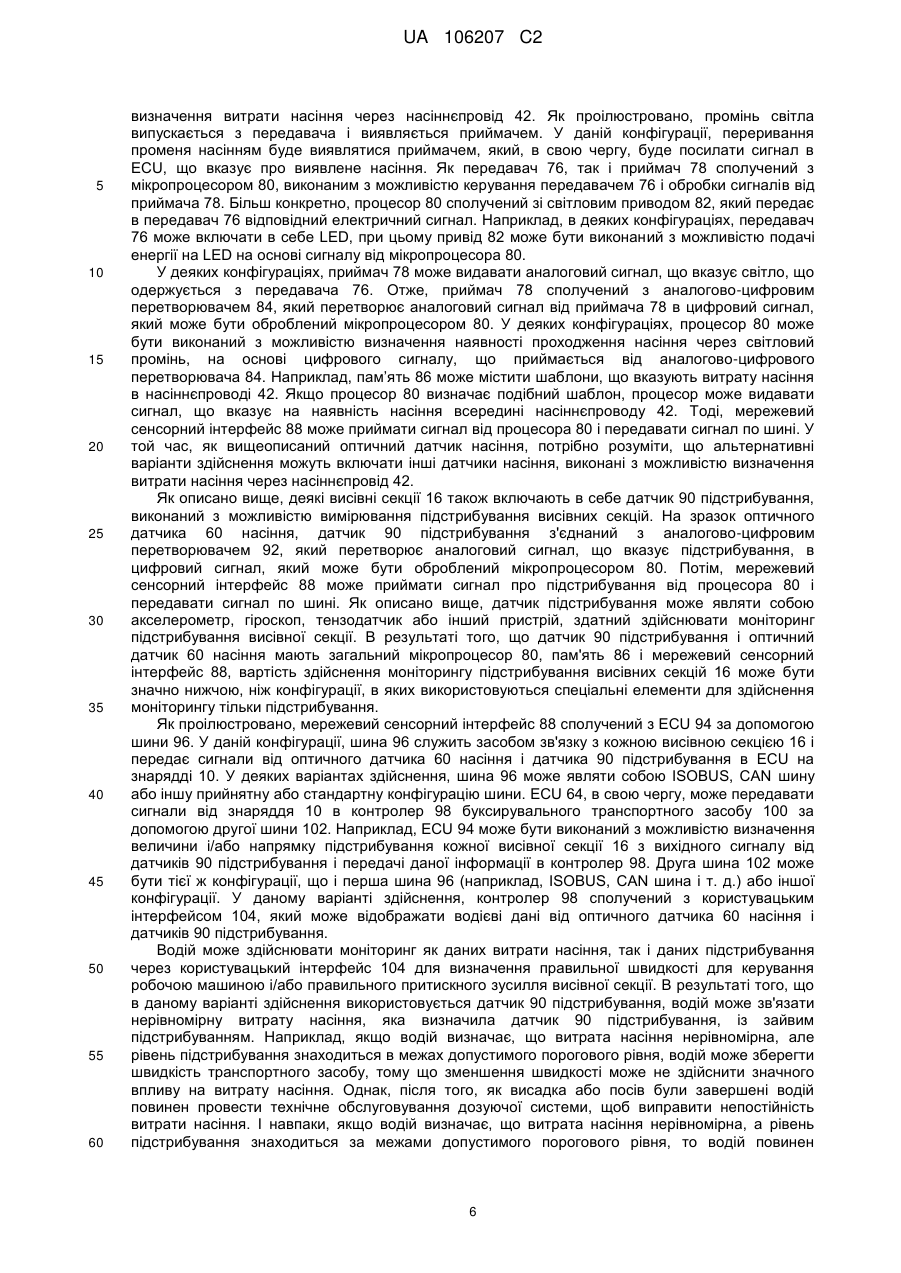
Реферат: Запропонована система сільськогосподарського знаряддя містить висівну секцію, виконану з можливістю внесення насіння в ґрунт. Система сільськогосподарського знаряддя також містить датчик підстрибування, жорстко з'єднаний з висівною секцією і виконаний з можливістю видачі сигналу, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію для висівної секції. UA 106207 C2 (12) UA 106207 C2 UA 106207 C2 5 10 15 20 25 30 35 40 45 50 55 60 Загалом, винахід стосується обладнання для обробки землі, такого як сільськогосподарське обладнання, а більш конкретно, знаряддя, що містить систему моніторингу підстрибування, виконану з можливістю вимірювання переміщення висівних секцій. Як правило, посівні знаряддя буксирують позаду трактора або іншого робочого транспортного засобу за допомогою встановлювального кронштейна, прикріпленого до жорсткої рами посівної машини або сівалки. Дані посівні знаряддя, звичайно, включають сошник, який входить в інструмент, що взаємодіє із землею або, який утворює висівний канал для внесення насіння в ґрунт. Сошник використовують для утворення борозни в ґрунті з метою забезпечення внесення насіння. Після внесення насіння, услід за сошником йде коткуючий коток, який ущільнює ґрунт зверху внесеного насіння. Деякі посівні знаряддя містять дозуючу систему, виконану з можливістю забезпечення потоку насіння в насіннєпровід, який вносить насіння в ґрунт. За рахунок роботи дозуючої системи з певною швидкістю може бути забезпечене внесення насіння з необхідною відстанню у міру просування знаряддя по полю. На жаль, бічне і/або вертикальне зміщення (наприклад, підстрибування, вібрація і т. д.) посівних знарядь може стати причиною зміни швидкості, з якою насіння вноситься в ґрунт дозуючими системами. Наприклад, якщо посівне знаряддя стикається з нерівною або перетнутою місцевістю, воно може піддаватися небажаному зміщенню, яке є причиною внесення дуже великої або дуже малої кількості насіння дозуючою системою в певному місцеположенні, приводячи, тим самим, до нерівномірного розподілу насіння в полі. Потрібно розуміти, що величина підстрибування може залежати від швидкості, з якою переміщується знаряддя. Отже, водій може обмежити швидкість робочого транспортного засобу, щоб забезпечити рівномірний розподіл насіння в полі. На жаль, обмеження швидкості робочого транспортного засобу збільшує тривалість процесу висадки або посіву, зменшуючи, за рахунок цього, ефективність сільськогосподарських робіт. У даному винаході пропонується знаряддя, що містить датчик підстрибування, виконаний з можливістю моніторингу переміщення щонайменше однієї висівної секції так, щоб водій міг регулювати швидкість знаряддя і/або притискне зусилля висівної секції на основі величини підстрибування для підтримування по суті рівномірної витрати насіння з висівної секції. У приведеному як приклад варіанті здійснення, система сільськогосподарського знаряддя містить висівну секцію, виконану з можливістю внесення насіння в ґрунт. Система сільськогосподарського знаряддя також містить датчик підстрибування, жорстко з'єднаний з висівною секцією і виконаний з можливістю видачі сигналу, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію висівної секції. У деяких конфігураціях, інформація про підстрибування передається водієві в буксирувальному транспортному засобі так, щоб водій міг регулювати швидкість знаряддя і/або притискне зусилля висівної секції для обмеження підстрибування висівних секцій і забезпечення по суті рівномірної витрати насіння з висівної секції. Деякі висівні секції також містять датчик насіння, виконаний з можливістю вимірювання швидкості витрати насіння з висівної секції. Подібні датчики насіння можуть бути виконані з можливістю передачі інформації водієві через мережевий сенсорний інтерфейс. У деяких конфігураціях датчик підстрибування має загальний інтерфейс з датчиком насіння, зменшуючи тим самим витрати на здійснення, пов'язані з моніторингом підстрибування висівних секцій. Ці та інші ознаки, аспекти і переваги даного винаходу стануть більш зрозумілими при прочитанні приведеного нижче докладного опису з посиланням на прикладені креслення, на яких однаковими посилальними позиціями позначені однакові елементи на всіх кресленнях, на яких: Фіг. 1 являє собою вигляд в перспективі приведеного як приклад сільськогосподарського знаряддя, що містить щонайменше одну висівну секцію, що має датчик підстрибування, виконаний з можливістю визначення переміщення висівної секції; Фіг. 2 являє собою вигляд в перспективі приведеної як приклад висівної секції, яка може бути використана в сільськогосподарському знарядді за фіг. 1; Фіг. 3 являє собою вигляд в перспективі висівної секції за фіг. 2 з деякими конструктивними елементами, не показаними для того, щоб продемонструвати насіннєпровід, що має оптичний датчик насіння і датчик підстрибування; Фіг. 4 являє собою вигляд збоку насіннєпроводу, показаного на фіг. 3, що ілюструє корпус датчика, який може вміщувати оптичний датчик насіння, датчик підстрибування і відповідну схему; Фіг. 5 являє собою вигляд в перспективі в розрізі насіннєпроводу по лінії 5-5 на фіг. 4, що показує ділянку внутрішньої частини корпусу датчика; і Фіг. 6 являє собою схематичну діаграму, наведену як приклад знаряддя, що має датчики підстрибування, з'єднані з електронним блоком керування через шину. 1 UA 106207 C2 5 10 15 20 25 30 35 40 45 50 55 З посиланням на креслення, фіг. 1 являє собою вигляд в перспективі сільськогосподарського знаряддя 10, виконаного з можливістю буксирування позаду робочого транспортного засобу, такого як трактор. Знаряддя 10 містить вузол 12 дишла, який показаний у вигляді А-подібного вузла зчіпного пристрою. Вузол 12 дишла може включати в себе зчіпний пристрій, що використовується для приєднання до відповідного зчіпного пристрою трактора через кульове шарнірне, вилкоподібне або інше з'єднання. Вузол 12 дишла з'єднують з брусом 14 для навішування робочих органів, який підтримує множину посівних знарядь або висівних секцій 16. Як детально описано нижче, одна або більше висівних секцій 16 може включати в себе датчик підстрибування, виконаний з можливістю визначення величини і/або напрямку підстрибування висівних секцій. Інформація про підстрибування може передаватися на інтерфейс користувача робочого транспортного засобу таким чином, щоб водій міг стежити за переміщенням знаряддя 10. На основі інформації про підстрибування, водій може регулювати швидкість робочого транспортного засобу і/або притискне зусилля висівної секції таким чином, щоб підстрибування залишалося нижчим необхідної межі для правильного внесення насіння. У деяких варіантах здійснення, датчик підстрибування може використовувати мережевий сенсорний інтерфейс, виконаний з можливістю передачі даних про витрату насіння їх оптичного насіннєвого датчика в електронний блок керування (ECU) знаряддя 10. Подібні варіанти здійснення можуть значно зменшити витрати, пов'язані з виконанням системи моніторингу підстрибування, оскільки для функціонування датчиків підстрибування відсутня необхідність у використанні додаткової шини або системи електроживлення. Фіг. 2 являє собою вигляд в перспективі, наведеної як приклад висівної секції 16, яка може бути використана на сільськогосподарському знарядді 10, показаному на фіг. 1. Як проілюстровано, висівна секція 16 включає в себе елементи 18 вузла паралельного важільного механізму, відомого також як шарнірний чотирикутник, виконаного з можливістю приєднання висівної секції 16 до бруса 14 для навішування робочих органів, забезпечуючи, в той же час, можливість вертикального переміщення висівної секції 16. Також можуть бути використані інші конфігурації, які допомагають визначенню підстрибування і обробці, що описуються нижче. Крім того, між встановлювальним кронштейном 22 і нижньою ділянкою паралельного важільного механізму продовжується зміщувальний елемент 20 для встановлення контактного зусилля між висівною секцією 16 і ґрунтом. У деяких конфігураціях, зміщувальний елемент 20 є регульованим для зміни контактного зусилля залежно від польових умов. Наприклад, зміщувальний елемент 20 може бути регульованим для компенсації зайвого підстрибування, яке визначається за допомогою датчиків підстрибування. Елементи 18 паралельного важільного механізму шарнірно з'єднані з шасі 24 і рамою 26. Рама 26 може бути виконана з можливістю підтримання різних елементів висівної секції 16, таких як, наприклад, дозуюча система. Як проілюстровано, шасі 24 підтримує сошниковий вузол 28, вузол 30 закладення ґрунту і вузол 32 коткуючого котка. У даній конфігурації сошниковий вузол 28 включає в себе копіювальне колесо 34, приєднане до шасі 24 за допомогою поворотного важеля 36. Як описано більш детально нижче, копіювальне колесо 34 може бути розташоване на відстані вертикально над сошниковим диском для встановлення необхідної глибини борозни для внесення насіння в ґрунт. У міру просування висівної секції 16 по полю, сошниковий диск викопує борозну в ґрунті, при цьому в борозну вноситься насіння. Потім, закладні диски 38 закладного вузла 30 штовхають викопаний ґрунт в борозну, а коток 40 вузла 30 коткуючого котка утрамбовує ґрунт зверху внесеного насіння. Даний процес створює в полі ряд висіяного насіння. За допомогою використання множини висівних секцій 16, розподілених вздовж бруса 14 для навішування робочих органів, як показано на фіг. 1, в полі може бути висіяна множина рядів насіння. Як детально описано нижче, шасі 24 також підтримує насіннєпровід 42, виконаний з можливістю передачі насіння з дозуючої системи в ґрунт. Вихід в насіннєпровід 42 розташований позаду сошникового диска і перед закладними дисками 38 так, що насіння вноситься в борозну перед тим, як борозна буде закладена. У деяких конфігураціях, насіннєпровід 42 включає в себе оптичний датчик насіння, виконаний з можливістю вимірювання витрати насіння через насіннєпровід 42. Висівна секція 16 може також включати в себе мережевий сенсорний інтерфейс, виконаний з можливістю передачі сигналів з насіннєвого датчика в електронний блок керування (ECU) знаряддя 10 через шину. Як проілюстровано, для сполучення оптичного насіннєвого датчика з ECU служить пара проводів 44 і 46. У деяких конфігураціях, перший провід 44 однієї висівної секції 16 може бути з'єднаний з другим проводом 46 іншої висівної секції для встановлення шинного з'єднання висівних секцій 16 з ECU. У результаті, сигнал, що передається мережевим сенсорним інтерфейсом, кожної висівної секції 16, буде передаватися по шині в ECU. 2 UA 106207 C2 5 10 15 20 25 30 35 40 45 50 55 60 У деяких варіантах здійснення, датчик підстрибування може бути з'єднаний з насіннєпроводом 42 і має загальний мережевий сенсорний інтерфейс і шину з оптичним датчиком насіння. Датчик підстрибування може вимірювати величину і/або напрямок підстрибування висівних секцій 16 і передавати в ECU сигнал, що вказує підстрибування. Потім, ECU може передавати інформацію про підстрибування в інтерфейс користувача в буксирувальному транспортному засобі, таким чином, щоб надати водієві вказівку про рівень підстрибування. Наприклад, в деяких варіантах здійснення, можна надати водієві середню і/або максимальний ступінь підстрибування по всіх висівних секціях 16 на знарядді 10. Тоді, на основі рівня підстрибування водій може регулювати швидкість буксирувального транспортного засобу і/або притискне зусилля висівної секції. За рахунок обмеження швидкості транспортного засобу і/або притискного зусилля висівної секції, підстрибування висівної секції може бути зменшене, забезпечуючи, за рахунок цього, по суті безперервний потік насіння дозуючими системами в ґрунт. В результаті того, що датчики підстрибування використовують ту ж саму шину, що оптичні датчики насіння, даний варіант здійснення знаряддя може бути більш ефективним по вартості в порівнянні з варіантами здійснення, в яких для передачі водієві даних про підстрибування використовується окрема шина. Фіг. 3 являє собою вигляд в перспективі висівної секції 16, яка показана на фіг. 2, з деякими конструктивними елементами, не показаними для того, щоб продемонструвати насіннєпровід 42. Як проілюстровано, в доповнення до копіювального колеса 34 і поворотного важеля 36, показаного на фіг. 2, сошниковий вузол 28 включає в себе сошниковий диск 48, що ущільнює головку 50 і скребачку 51. Як описано вище, сошниковий диск 48 виконаний з можливістю викопування борозни в ґрунті таким чином, щоб у борозну можна було внести насіння. Ущільнююча головка 50 ущільнює рихлий ґрунт на дні борозни, що утворюється сошниками 48 для забезпечення безперервної v-форми для розташування насіння. Скребачка 51 розташована впритул до диска 48 і виконана з можливістю видалення ґрунту, що зібрався з диска 48, у міру обертання диска. Насіннєпровід 42 розташований позаду сошникового диска 48 і виконаний з можливістю переміщення насіння з дозуючої системи в ґрунт. Більш конкретно, насіннєпровід 42 включає в себе впуск 52, виконаний з можливістю одержання потоку насіння з дозуючої системи в напрямку 54. Потім, насіння проходить по насіннєпроводу 42 і виходить з випуску 56 насіннєпроводу в напрямку 58. Випуск 56 розташований таким чином, щоб насіння розташовувалося всередині щойно викопаної борозни. Закладні диски 38, розташовані позаду насіннєпроводу 42, виконані з можливістю закладання борозни, а коткуючий коток 40 виконаний з можливістю утрамбовування ґрунту зверху внесеного насіння. Як проілюстровано, насіннєпровід 42 включає в себе оптичний датчик 60 насіння, виконаний з можливістю виявлення насіння, що проходить через насіннєпровід 42. У деяких конфігураціях, як, наприклад, при посіві кукурудзи, сорго, сої та інших культур, насіння з дозуючої системи подається в ґрунт окремо через насіннєпровід 42. У подібних конфігураціях, оптичний датчик 60 насіння може виявляти присутність кожного насіння по мірі його проходження через датчик, і передавати інформацію про виявлення насіння в ECU на знарядді 10. Як описано детально нижче, оптичний датчик 60 насіння може включати в себе передавач і приймач, розташовані на протилежних боках насіннєпроводу 42. Передавач виконаний з можливістю випромінювання світлових пучків (наприклад, видимого, інфрачервоного, ультрафіолетового і т. д.) в напрямку приймача. У міру проходження насіння через насіннєпровід 42, насіння буде переривати пучок, активуючи, за рахунок цього, оптичний датчик 60 насіння. У деяких конфігураціях, ECU буде передавати інформацію про виявлення насіння в контролер на буксирувальному транспортному засобі. Контролер може бути виконаний з можливістю моніторингу швидкості, з якою насіння проходить через насіннєпровід 42 кожної висівної секції 16. Якщо швидкість більша або менша, ніж необхідний рівень, контролер може попереджувати водія про ситуацію. У деяких варіантах здійснення, датчик підстрибування встановлюють на насіннєпроводі 42 всередині того ж корпусу, що і оптичний датчик 60 насіння. У альтернативних варіантах здійснення, датчик підстрибування може бути встановлений всередині насіннєпроводу 42 або в інших зонах висівної секції 16, таких як, наприклад, шасі 24 або рама 26. Датчик підстрибування виконаний з можливістю визначення величини і/або напрямку підстрибування висівних секцій і передачі даних про підстрибування в ECU. Як описано детально нижче, для сполучення з ECU через шину, датчик підстрибування і оптичний датчик 60 насіння можуть використовувати загальний мережевий сенсорний інтерфейс на висівній секції 16. Потім, дані про підстрибування можуть передаватися з ECU в контролер на робочому транспортному засобі. Контролер, в свою чергу, може передавати дані про підстрибування водієві. Наприклад, користувацький інтерфейс на буксирувальному транспортному засобі може показувати середню величину і/або напрямок підстрибування для кожної висівної секції 16. Як альтернатива, користувацький інтерфейс може 3 UA 106207 C2 5 10 15 20 25 30 35 40 45 50 55 60 надавати водієві показники середньої величини і/або напрямки підстрибування для всіх висівних секцій 16. На практиці, показник може являти собою простий світловий або інший візуальний або аудіопопереджувальний сигнал, який інформує водія, що досягнутий небажаний ступінь підстрибування. Подібне підстрибування може бути викликане умовами навколишнього середовища, в яких працює машина, ґрунтовими умовами, швидкістю відносно землі або поєднанням факторів. Тоді, водій може вирішити проблему за рахунок сповільнення швидкості транспортного засобу, регулювання зміщувального елемента 20, перевірки знаряддя або за допомогою інших відповідних дій. Для визначення належної швидкості з метою керування робочою машиною і/або належного притискного зусилля висівної секції, водій може здійснювати моніторинг як даних витрати насіння, так і даних про підстрибування. Потрібно розуміти, що підстрибування висівної секції щонайменше частково залежить від вирівняності рельєфу місцевості, притискного зусилля висівної секції і швидкості, з якою знаряддя 10 рухається по місцевості. Потрібно також розуміти, що підстрибування висівної секції може викликати нерівномірну витрату насіння з дозуючого пристрою в насіннєпровід 42. Наприклад, якщо знаряддя 10 зустрічається з перетнутою або нерівною місцевістю, знаряддя може піддаватися небажаному переміщенню, яке є причиною дуже великої або дуже маленької витрати насіння, приводячи тим самим до нерівномірного розподілу насіння в полі. Отже, водій може здійснювати моніторинг витрати насіння, який вимірює оптичний датчик 60 насіння, для визначення того, чи рівномірно розподіляється насіння в ґрунті. Якщо витрата насіння нерівномірна, водій, для зменшення підстрибування висівних секцій, може зменшити швидкість робочого транспортного засобу і/або відрегулювати зміщувальний елемент 20, підтримуючи, за рахунок цього, по суті сталу витрату насіння. Однак, нерівномірний розподіл насіння може бути викликаний іншими факторами, не пов'язаними з підстрибуванням висівної секції, такими як зношені складові частини пристрою дозування. У подібних випадках, зменшення швидкості транспортного засобу і/або зменшення притискного зусилля висівної секції може мати тільки негативний вплив на сталу витрату насіння. Отже, датчик підстрибування використаний в даному винаході з метою надання водієві можливості зіставлення нерівномірної витрати насіння із зайвим підстрибуванням. Наприклад, якщо водій визначає, що витрата насіння нерівномірна, але рівень підстрибування знаходиться в межах прийнятного порогового рівня, водій може зберегти швидкість транспортного засобу, тому що зменшення швидкості може не здійснити значного впливу на витрату насіння. Однак, після завершення висадки або посіву, водій повинен здійснити технічне обслуговування дозуючої системи для виправлення непостійного рівня витрати насіння. І навпаки, якщо водій визначає, що витрата насіння нерівномірна, а рівень підстрибування знаходиться за межами допустимого порогового рівня, то водій повинен зменшити швидкість транспортного засобу і/або зменшити притискне зусилля висівної секції для зменшення підстрибування висівних секцій, відновлюючи, за рахунок цього, рівномірність витрати насіння з дозуючої системи. В результаті того, що даний датчик підстрибування сприяє збільшенню обізнаності водія в тому, що стосується причини нерівномірності розподілу насіння, в даному варіанті здійснення можна збільшити ефективність посівних і посадочних робіт. Як описано вище, підстрибування висівної секції може бути викликане контактом висівної секції 16 з борозною, пересіченою місцевістю, рослинними залишками, каменями або іншими перешкодами, будучи за рахунок цього, причиною зміни дозуючими системами витрати, з якими насіння вноситься в ґрунт. Потрібно розуміти, що підстрибування може бути визначене, як лінійне переміщення, кутове переміщення, лінійна швидкість, кутова швидкість, лінійне прискорення, кутове прискорення і/або похідні більш високого порядку переміщення і/або обертання висівної секції 16. Отже, датчик підстрибування може являти собою будь-який прийнятний пристрій, виконаний з можливістю вимірювання лінійної швидкості, кутової швидкості, лінійного прискорення, кутового прискорення, зусилля, моменту або інших параметрів, що є показником підстрибування висівних секцій. Наприклад, датчиком підстрибування може бути акселерометр, виконаний з можливістю вимірювання прискорення висівної секції 16. Прийнятні акселерометри, серед іншого, можуть являти собою, але не обмежуючись, п'єзоелектричні датчики, акселерометри з коливаннями зміщення, ємнісні датчики з мікромашинною обробкою поверхні, ємнісні акселерометри з пружинним підвісом рухомої системи, магнітно-індуктивні акселерометри або акселерометри на поверхневих акустичних хвилях. Як альтернатива, датчиком підстрибування може бути пристрій, виконаний з можливістю вимірювання положення висівної секції 16 відносно бруса 14 для навішування робочих органів. Наприклад, для вимірювання швидкості переміщення висівної секції 16 може бути використаний лінійний потенціометричний датчик, оптичний перетворювач 4 UA 106207 C2 5 10 15 20 25 30 35 40 45 50 55 60 або електромагнітний звукознімач. У додаткових варіантах здійснення, до елементів конструкції (наприклад, шасі 24, рамі 26 і т. д.) може бути приєднаний тензодатчик для вимірювання деформації елемента. Потрібно розуміти, що ступінь деформації елемента щонайменше частково залежить від зусилля і/або моменту, якому піддається елемент. Отже, тензодатчик може ефективно вимірювати підстрибування висівної секції 16. В інших додаткових варіантах здійснення, для визначення обертання і/або швидкостей обертання, зв'язаних з підстрибуванням висівних секцій, може бути використаний гіроскоп (наприклад, механічний, волоконно-оптичний, кільцевий лазер, вібруюча конструкція і т. д.). Фіг. 4 являє собою вигляд збоку насіннєпроводу 42, показаного на фіг. 3, що ілюструє корпус датчика, який може вміщувати оптичний датчик 60 насіння, датчик підстрибування і відповідну схему. Як проілюстровано, перший корпус 62 приєднаний до одного боку насіннєпроводу 42, а другий корпус 64 - до протилежного боку насіннєпроводу 42. У даному варіанті здійснення, для прикріплення до насіннєпровіду 42 першого і другого корпусів 62 і 64 служить пара хомутів 66. Однак, в альтернативних варіантах здійснення, для встановлення корпусів 62 і 64 на насіннєпроводі 42, можуть бути використані різні інші системи з'єднання (наприклад, клей, затиски і т. д.), або окремо, або в комбінації. Як описано вище, оптичний датчик 60 насіння може включати в себе передавач і приймач, розташовані на протилежних боках насіннєпроводу 42. Світловий промінь, який проходить між передавачем і приймачем служить для виявлення потоку насіння через насіннєпровід 42. Більш конкретно, у міру проходження насіння через насіннєпровід 42 в напрямку 54, насіння буде перекривати промінь, активуючи, за допомогою цього, оптичний датчик 60 насіння. У деяких варіантах здійснення, передавач може бути укладений всередині другого корпусу 64, а приймач може бути розташований всередині першого корпусу 62. Однак, потрібно розуміти, що в альтернативних варіантах здійснення, положення передавача і приймача можуть мінятися місцями (наприклад, передавач розташований всередині першого корпусу 62, а приймач - всередині другого корпусу 64). Як проілюстровано, перший корпус 62 більший, ніж другий корпус 64. Отже, перший корпус 62 може вміщувати схему і/або інші елементи, виконані з можливістю передачі даних від датчика 60 в ECU. Наприклад, перший корпус 62 може включати в себе мікропроцесор, виконаний з можливістю обробки даних з оптичного датчика 60 насіння і/або схему, що утворює мережевий сенсорний інтерфейс, виконаний з можливістю передачі даних від датчика 60 в ECU через шину. У деяких варіантах здійснення, перший корпус 62 може вміщувати датчик підстрибування, який може мати загальну схему (наприклад, мікропроцесор, мережевий сенсорний інтерфейс і т. д.) з оптичним датчиком 60 насіння. Фіг. 5 являє собою вигляд в перспективі в розрізі насіннєпроводу 42 по лінії 5-5 на фіг. 4, що показує частину внутрішньої частини корпусу датчика. Як проілюстровано, перший корпус 62 включає в себе порожнину 68, виконану з можливістю вміщення частини оптичного датчика 60 насіння. Наприклад, в деяких конфігураціях, порожнина 68 може вміщувати приймач, а в альтернативних конфігураціях, порожнина 68 може вміщувати передавач. Отвір 70 всередині насіннєпроводу 42, поруч з порожниною 68, сприяє проходженню світла між насіннєпроводом 42 і датчиком 60. Наприклад, у варіантах здійснення, в яких порожнина 68 вміщує приймач, світло з передавача може пройти через отвір 70 в приймач. На протилежному боці насіннєпроводу 42, проходження світла між насіннєпроводом 42 і другим корпусом 64 полегшує множину отворів 72. У конфігураціях, в яких приймач розташований всередині порожнини 68, передавач може бути розміщений всередині другого корпусу 64. У подібних конфігураціях, для випромінювання світла через відповідний отвір 72 можуть бути розташовані окремі джерела світла (наприклад, світлоізолюючі діоди (LED), електролампи і т. д.). Таким чином, в приймач через отвір 70 може передаватися по суті безперервний промінь світла, полегшуючи за допомогою цього, виявлення насіння, що проходить через насіннєпровід 42. Як проілюстровано, перший корпус 62 включає в себе другу порожнину 74, яка розташована поруч з першою порожниною 68. Друга порожнина 74 може вміщувати схему і/або інші елементи, виконані з можливістю передачі даних від датчика 60 в ECU. Наприклад, друга порожнина 74 може включати в себе мікропроцесор, виконаний з можливістю обробки даних з оптичного датчика 60 насіння, і/або схему, що утворює мережевий сенсорний інтерфейс, виконаний з можливістю передачі даних з датчика 60 в ECU через шину. У деяких варіантах здійснення, друга порожнина 74 може вміщувати датчик підстрибування, який може мати загальну схему (наприклад, мікропроцесор, мережевий сенсорний інтерфейс і т. д.) з оптичним датчиком 60 насіння. Фіг. 6 являє собою схематичну діаграму наведеного як приклад знаряддя 10, що має датчики підстрибування, з'єднані з електронним блоком керування через шину. Як описано вище, оптичний датчик 60 насіння включає передавач 76 і приймач 78, виконані з можливістю 5 UA 106207 C2 5 10 15 20 25 30 35 40 45 50 55 60 визначення витрати насіння через насіннєпровід 42. Як проілюстровано, промінь світла випускається з передавача і виявляється приймачем. У даній конфігурації, переривання променя насінням буде виявлятися приймачем, який, в свою чергу, буде посилати сигнал в ECU, що вказує про виявлене насіння. Як передавач 76, так і приймач 78 сполучений з мікропроцесором 80, виконаним з можливістю керування передавачем 76 і обробки сигналів від приймача 78. Більш конкретно, процесор 80 сполучений зі світловим приводом 82, який передає в передавач 76 відповідний електричний сигнал. Наприклад, в деяких конфігураціях, передавач 76 може включати в себе LED, при цьому привід 82 може бути виконаний з можливістю подачі енергії на LED на основі сигналу від мікропроцесора 80. У деяких конфігураціях, приймач 78 може видавати аналоговий сигнал, що вказує світло, що одержується з передавача 76. Отже, приймач 78 сполучений з аналогово-цифровим перетворювачем 84, який перетворює аналоговий сигнал від приймача 78 в цифровий сигнал, який може бути оброблений мікропроцесором 80. У деяких конфігураціях, процесор 80 може бути виконаний з можливістю визначення наявності проходження насіння через світловий промінь, на основі цифрового сигналу, що приймається від аналогово-цифрового перетворювача 84. Наприклад, пам’ять 86 може містити шаблони, що вказують витрату насіння в насіннєпроводі 42. Якщо процесор 80 визначає подібний шаблон, процесор може видавати сигнал, що вказує на наявність насіння всередині насіннєпроводу 42. Тоді, мережевий сенсорний інтерфейс 88 може приймати сигнал від процесора 80 і передавати сигнал по шині. У той час, як вищеописаний оптичний датчик насіння, потрібно розуміти, що альтернативні варіанти здійснення можуть включати інші датчики насіння, виконані з можливістю визначення витрати насіння через насіннєпровід 42. Як описано вище, деякі висівні секції 16 також включають в себе датчик 90 підстрибування, виконаний з можливістю вимірювання підстрибування висівних секцій. На зразок оптичного датчика 60 насіння, датчик 90 підстрибування з'єднаний з аналогово-цифровим перетворювачем 92, який перетворює аналоговий сигнал, що вказує підстрибування, в цифровий сигнал, який може бути оброблений мікропроцесором 80. Потім, мережевий сенсорний інтерфейс 88 може приймати сигнал про підстрибування від процесора 80 і передавати сигнал по шині. Як описано вище, датчик підстрибування може являти собою акселерометр, гіроскоп, тензодатчик або інший пристрій, здатний здійснювати моніторинг підстрибування висівної секції. В результаті того, що датчик 90 підстрибування і оптичний датчик 60 насіння мають загальний мікропроцесор 80, пам'ять 86 і мережевий сенсорний інтерфейс 88, вартість здійснення моніторингу підстрибування висівних секцій 16 може бути значно нижчою, ніж конфігурації, в яких використовуються спеціальні елементи для здійснення моніторингу тільки підстрибування. Як проілюстровано, мережевий сенсорний інтерфейс 88 сполучений з ECU 94 за допомогою шини 96. У даній конфігурації, шина 96 служить засобом зв'язку з кожною висівною секцією 16 і передає сигнали від оптичного датчика 60 насіння і датчика 90 підстрибування в ECU на знарядді 10. У деяких варіантах здійснення, шина 96 може являти собою ISOBUS, CAN шину або іншу прийнятну або стандартну конфігурацію шини. ECU 64, в свою чергу, може передавати сигнали від знаряддя 10 в контролер 98 буксирувального транспортного засобу 100 за допомогою другої шини 102. Наприклад, ECU 94 може бути виконаний з можливістю визначення величини і/або напрямку підстрибування кожної висівної секції 16 з вихідного сигналу від датчиків 90 підстрибування і передачі даної інформації в контролер 98. Друга шина 102 може бути тієї ж конфігурації, що і перша шина 96 (наприклад, ISOBUS, CAN шина і т. д.) або іншої конфігурації. У даному варіанті здійснення, контролер 98 сполучений з користувацьким інтерфейсом 104, який може відображати водієві дані від оптичного датчика 60 насіння і датчиків 90 підстрибування. Водій може здійснювати моніторинг як даних витрати насіння, так і даних підстрибування через користувацький інтерфейс 104 для визначення правильної швидкості для керування робочою машиною і/або правильного притискного зусилля висівної секції. В результаті того, що в даному варіанті здійснення використовується датчик 90 підстрибування, водій може зв'язати нерівномірну витрату насіння, яка визначила датчик 90 підстрибування, із зайвим підстрибуванням. Наприклад, якщо водій визначає, що витрата насіння нерівномірна, але рівень підстрибування знаходиться в межах допустимого порогового рівня, водій може зберегти швидкість транспортного засобу, тому що зменшення швидкості може не здійснити значного впливу на витрату насіння. Однак, після того, як висадка або посів були завершені водій повинен провести технічне обслуговування дозуючої системи, щоб виправити непостійність витрати насіння. І навпаки, якщо водій визначає, що витрата насіння нерівномірна, а рівень підстрибування знаходиться за межами допустимого порогового рівня, то водій повинен 6 UA 106207 C2 5 10 15 20 25 30 35 40 45 50 55 зменшити швидкість транспортного засобу і/або зменшити притискне зусилля висівної секції для зменшення підстрибування висівних секцій, відновлюючи, за рахунок цього, рівномірність витрати насіння з дозуючої системи. В результаті того, що даний датчик підстрибування сприяє збільшенню обізнаності водія в тому, що стосується причини нерівномірності розподілу насіння, даний варіант здійснення може збільшити ефективність посівних і посадочних робіт. Незважаючи на те, що в даному варіанті здійснення проілюстровані дві висівні секції 16, потрібно розуміти, що в альтернативних варіантах здійснення може бути використано більше або менше висівних секцій 16. Наприклад, в деяких конфігураціях, із знаряддям 10 можуть бути з'єднані 1, 2, 3, 4, 5, 10, 15, 20, 25 або більше висівних секцій 16. Крім того, незважаючи на те, що кожна висівна секція 16 даного варіанта здійснення включає в себе датчик 90 підстрибування, потрібно розуміти, що в альтернативних варіантах здійснення висівні секції 16 можуть не містити датчик 90 підстрибування. Наприклад, в деяких конфігураціях, один датчик 90 підстрибування може бути з'єднаний з кожною другою висівною секцією, кожною третьою висівною секцією і т. д. Крім того, незважаючи на те, що проілюстрована конфігурація шини, потрібно розуміти, що в альтернативних варіантах здійснення, кожна висівна секція може бути безпосередньо з'єднана з ECU 94 і/або контролером 98. Крім того, незважаючи на те, що в даному варіанті здійснення, датчик 90 підстрибування має загальну схему з оптичним датчиком 60 насіння, в альтернативних варіантах здійснення датчик 90 підстрибування може мати загальну схему в знарядді 10 з іншими електронними мережами. В інших додаткових варіантах здійснення, датчик 90 підстрибування може бути з'єднаний з іншими зонами знаряддя 10, такими як брус 14 для навішування робочих органів, для вимірювання підстрибування знаряддя 10. У подібних варіантах здійснення, датчик 90 підстрибування може використовувати загальну мережу (наприклад, мережевий сенсорний інтерфейс 88, першу шину 96 і/або другу шину 102) з датчиками 60 насіння. Незважаючи на те, що в даній заявці були проілюстровані і описані тільки деякі ознаки винаходу, фахівцям в даній галузі буде очевидна множина доповнень і змін. Таким чином, потрібно розуміти, що прикладена формула винаходу охоплює всі такі доповнення і зміни, які потрапляють в межі суті винаходу. ФОРМУЛА ВИНАХОДУ 1. Система сільськогосподарського знаряддя, яка містить: множину висівних секцій, кожна з яких виконана з можливістю внесення насіння в ґрунт; і датчик підстрибування, жорстко з'єднаний з щонайменше однією висівною секцією і виконаний з можливістю видачі сигналу, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію щонайменше однієї висівної секції. 2. Система за п. 1, яка містить електронний блок керування, виконаний з можливістю прийому даних від мережевого сенсорного інтерфейсу, при цьому датчик підстрибування виконаний з можливістю видачі сигналу, що вказує підстрибування, в мережевий сенсорний інтерфейс. 3. Система за п. 2, в якій кожна висівна секція містить: насіннєпровід, виконаний з можливістю спрямування насіння в ґрунт; і датчик насіння, який розташований поруч з насіннєпроводом, при цьому датчик насіння виконаний з можливістю моніторингу витрати насіння через насіннєпровід і видачі сигналу в електронний блок керування через мережевий сенсорний інтерфейс, що вказує витрату насіння. 4. Система за п. 2, в якій електронний блок керування виконаний з можливістю видачі сигналу в контролер буксирувального транспортного засобу, що вказує підстрибування. 5. Система за п. 1, в якій датчик підстрибування являє собою акселерометр. 6. Система за п. 1, яка містить множину датчиків підстрибування, при цьому кожен датчик підстрибування жорстко з'єднаний з кожною висівною секцією. 7. Система за п. 6, яка містить електронний блок керування, виконаний з можливістю прийому даних від кожного датчика підстрибування і обчислення середньої величини підстрибування, середнього напрямку підстрибування або їх комбінації. 8. Система сільськогосподарського знаряддя, яка містить: висівну секцію з датчиком підстрибування, виконаним з можливістю моніторингу витрати насіння і видачі першого сигналу через мережевий сенсорний інтерфейс, що вказує витрату насіння; датчик підстрибування, виконаний з можливістю видачі другого сигналу через мережевий сенсорний інтерфейс, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію, системи сільськогосподарського знаряддя; і 7 UA 106207 C2 5 10 15 20 25 30 35 40 електронний блок керування, виконаний з можливістю прийому першого сигналу і другого сигналу з мережевого сенсорного інтерфейсу і визначення величини підстрибування, напрямку підстрибування або їх комбінації, на основі другого сигналу. 9. Система за п. 8, в якій датчик підстрибування жорстко з'єднаний з висівною секцією. 10. Система за п. 8, в якій електронний блок керування виконаний з можливістю видачі третього сигналу в контролер буксирувального транспортного засобу, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію. 11. Система за п. 8, яка містить корпус, встановлений на насіннєпроводі висівної секції, при цьому корпус вміщує датчик насіння і датчик підстрибування. 12. Система за п. 8, яка містить множину висівних секцій, кожна з яких має датчик насіння, при цьому кожен датчик насіння виконаний з можливістю видачі першого сигналу через мережевий сенсорний інтерфейс. 13. Система за п. 12, яка містить множину датчиків підстрибування, при цьому кожен датчик підстрибування жорстко з'єднаний з кожною висівною секцією, причому кожен датчик підстрибування виконаний з можливістю видачі другого сигналу через мережевий сенсорний інтерфейс. 14. Система за п. 12, яка містить шину, виконану з можливістю передачі першого сигналу і другого сигналу з мережевого сенсорного інтерфейсу в електронний блок керування. 15. Система за п. 8, в якій датчик підстрибування являє собою акселерометр. 16. Система сільськогосподарського знаряддя, яка містить: множину висівних секцій, кожна з яких має датчик насіння, виконаний з можливістю моніторингу витрати насіння і видачі першого сигналу через мережевий сенсорний інтерфейс, що вказує витрату насіння; датчик підстрибування, жорстко з'єднаний зі щонайменше однією висівною секцією, при цьому датчик підстрибування виконаний з можливістю видачі другого сигналу через мережевий сенсорний інтерфейс, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію щонайменше однієї висівної секції; і електронний блок керування, виконаний з можливістю прийому першого сигналу і другого сигналу з мережевого сенсорного інтерфейсу і визначення величини підстрибування, напрямку підстрибування або їх комбінації на основі другого сигналу. 17. Система за п. 16, яка містить множину датчиків підстрибування, кожен з яких жорстко з'єднаний з кожною висівною секцією. 18. Система за п. 17, яка містить множину корпусів, кожен з яких встановлений на насіннєпроводі кожної висівній секції, при цьому кожен корпус вміщає датчик насіння і датчик підстрибування. 19. Система за п. 16, яка містить шину, виконану з можливістю передачі першого сигналу і другого сигналу з мережевого сенсорного інтерфейсу в електронний блок керування. 20. Система за п. 16, в якій електронний блок керування виконаний з можливістю видачі третього сигналу в контролер буксирувального транспортного засобу, що вказує величину підстрибування, напрямок підстрибування або їх комбінацію. 8 UA 106207 C2 9 UA 106207 C2 10 UA 106207 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Автори російськоюKowalchuk Trevor L.
МПК / Мітки
МПК: A01B 49/06, G01P 13/00, A01C 7/12
Мітки: висівних, секцій, підстрибування, система, моніторингу, варіанти
Код посилання
<a href="https://ua.patents.su/13-106207-sistema-monitoringu-pidstribuvannya-visivnikh-sekcijj-varianti.html" target="_blank" rel="follow" title="База патентів України">Система моніторингу підстрибування висівних секцій (варіанти)</a>
Стенд для дослідження характеристик висівних апаратів
Номер патенту: 31727
Опубліковано: 25.04.2008
Автори: Гевко Іван Богданович, Чвартацький Роман Ігорович, Чвартацький Ігор Іванович, Павлиський Василь Михайлович
МПК: B65G 33/00
Мітки: характеристик, дослідження, висівних, апаратів, стенд
Формула / Реферат:
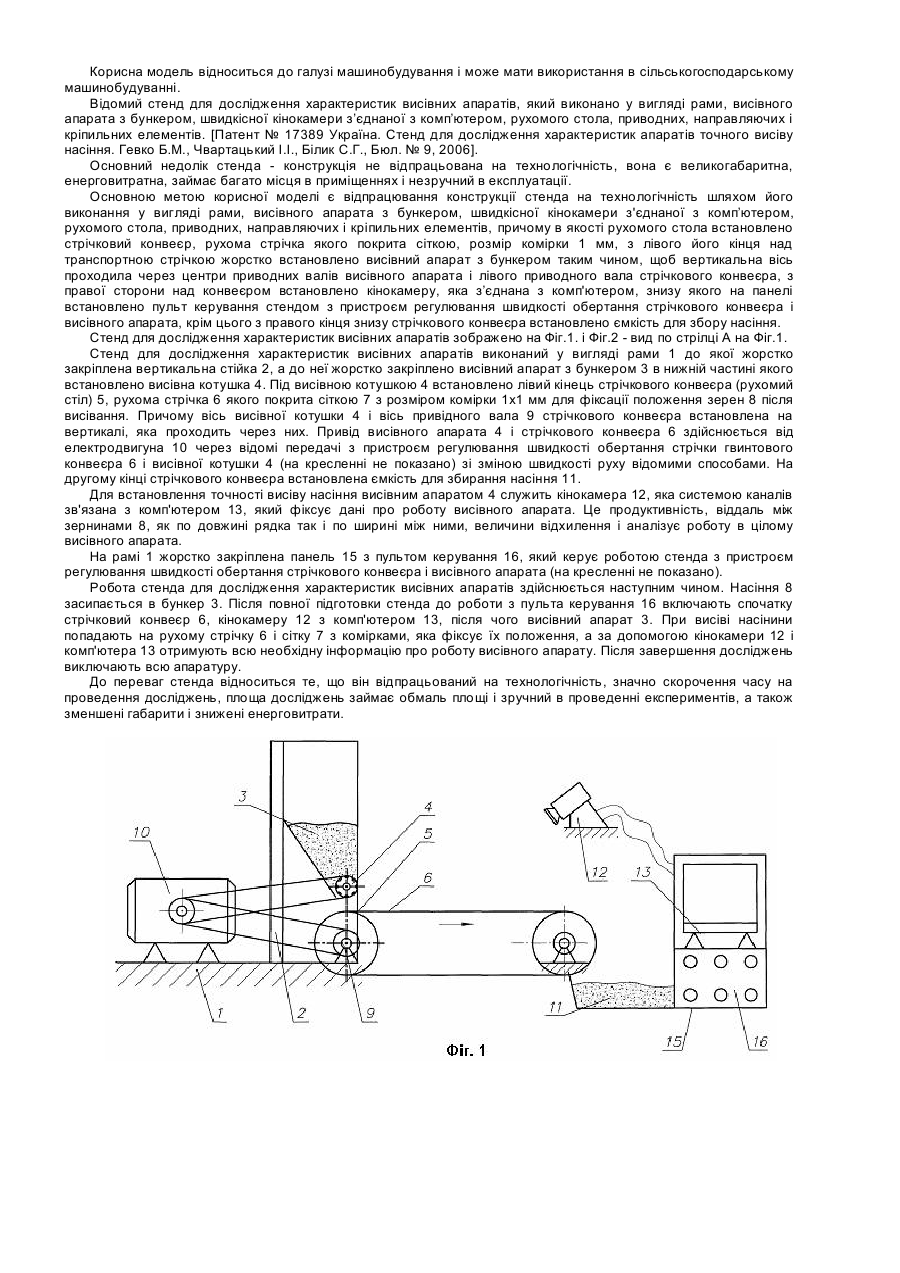
Стенд для дослідження характеристик висівних апаратів, який виконано у вигляді рами, висівного апарата з бункером, швидкісної кінокамери, з'єднаної з комп'ютером, рухомого стола, привідних, напрямних і кріпильних елементів, який відрізняється тим, що як рухомий стіл встановлено стрічковий конвеєр, рухома стрічка якого покрита сіткою, розмір комірки якої 11 мм, з лівого...
Система для моніторингу, аналізу та контролю подій безпеки мережі
Номер патенту: 82020
Опубліковано: 10.07.2013
Автор: Галущенко Олександр Михайлович
МПК: G06F 7/00, G06F 21/00
Мітки: мережі, система, моніторингу, аналізу, подій, безпеки, контролю
Формула / Реферат:
1. Система для моніторингу, аналізу та контролю подій безпеки мережі, що складається з блока мережевого інтерфейсу, вхід якого з'єднаний з контрольованою мережею, а вихід з блоком програмного управління, який зв'язаний з блоком користувацького інтерфейсу, блоком обробки та аналізу інформації та блоком збереження інформації, вказані блоки встановлені на електронно-обчислювальний пристрій, яка відрізняється тим, що блок мережевого інтерфейсу...
Система раннього виявлення надзвичайних ситуацій в процесі моніторингу фізичних параметрів довкілля
Номер патенту: 64363
Опубліковано: 10.11.2011
Автори: Злочевський Микола Владиславович, Гошовський Сергій Володимирович, Темнік Михайло Юрійович
МПК: G08B 19/00
Мітки: раннього, моніторингу, фізичних, параметрів, виявлення, надзвичайних, система, ситуацій, довкілля, процесі
Формула / Реферат:
Система раннього виявлення надзвичайних ситуацій в процесі моніторингу фізичних параметрів довкілля, що включає датчик температури, підключений до концентратора та сполучений по захищеному каналу за допомогою провайдера супутникового зв'язку через мережу зв'язку з використанням протоколів пакетної передачі даних TCP/IP до віддаленого сервера, сполученого з базою даних, з якою сполучені диспетчери, що мають програмне забезпечення, яка...
Пристрій для дослідження роботи висівних апаратів
Номер патенту: 46276
Опубліковано: 15.05.2002
Автори: Остапчук Микола Володимирович, Магопець Олександр Степанович, Жосан Лілія Василівна, Ауліна Тетяна Миколаївна, Подковський Анатолій Федорович, Мартиненко Сергій Абелевич
МПК: A01C 7/00
Мітки: пристрій, роботи, дослідження, висівних, апаратів
Формула / Реферат:
Пристрій для вивчення рівномірності розподілу насінь по довжині рядка, що містить висівний апарат, закріплений на рамі і липкій стрічці, який відрізняється тим, що біля виходу з висіваючого апарата і сошника встановлені датчики, з'єднані з багатоканальним самописом.
Мобільна система для моніторингу стану маршрутної мережі великого міста
Номер патенту: 77725
Опубліковано: 25.02.2013
Автори: Алексієв Володимир Олегович, Алексієв Олег Павлович, Неронов Сергій Миколайович
МПК: G01C 23/00
Мітки: система, моніторингу, мережі, міста, стану, маршрутної, великого, мобільна
Формула / Реферат:
Мобільна система для моніторингу стану маршрутної мережі великого міста, що складається з супутникової навігаційної системи, інерціальної системи та комунікаційного комплексу, пов'язаних з приладом для зберігання інформації, яка відрізняється тим, що до її складу вводяться додаткові прилади аналізу повітря та радіаційного фону, причому запис інформації з приладів-аналізаторів здійснюється безперервно та циклічно і пов'язується з приладом...
Попередній патент: Похідні тіофену або тіазолу та їх застосування як інгібіторів pі3k
Наступний патент: Спосіб синтезу івабрадину і його адитивних солей з фармацевтично прийнятною кислотою
Випадковий патент: Комплексна добавка в бетонні суміші і будівельні розчини