Радіолокатор з пристроєм компенсації завад відніманням
Номер патенту: 32194
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Пророшин Сергій Михайлович, Кудрик Андрій Миколайович

Текст
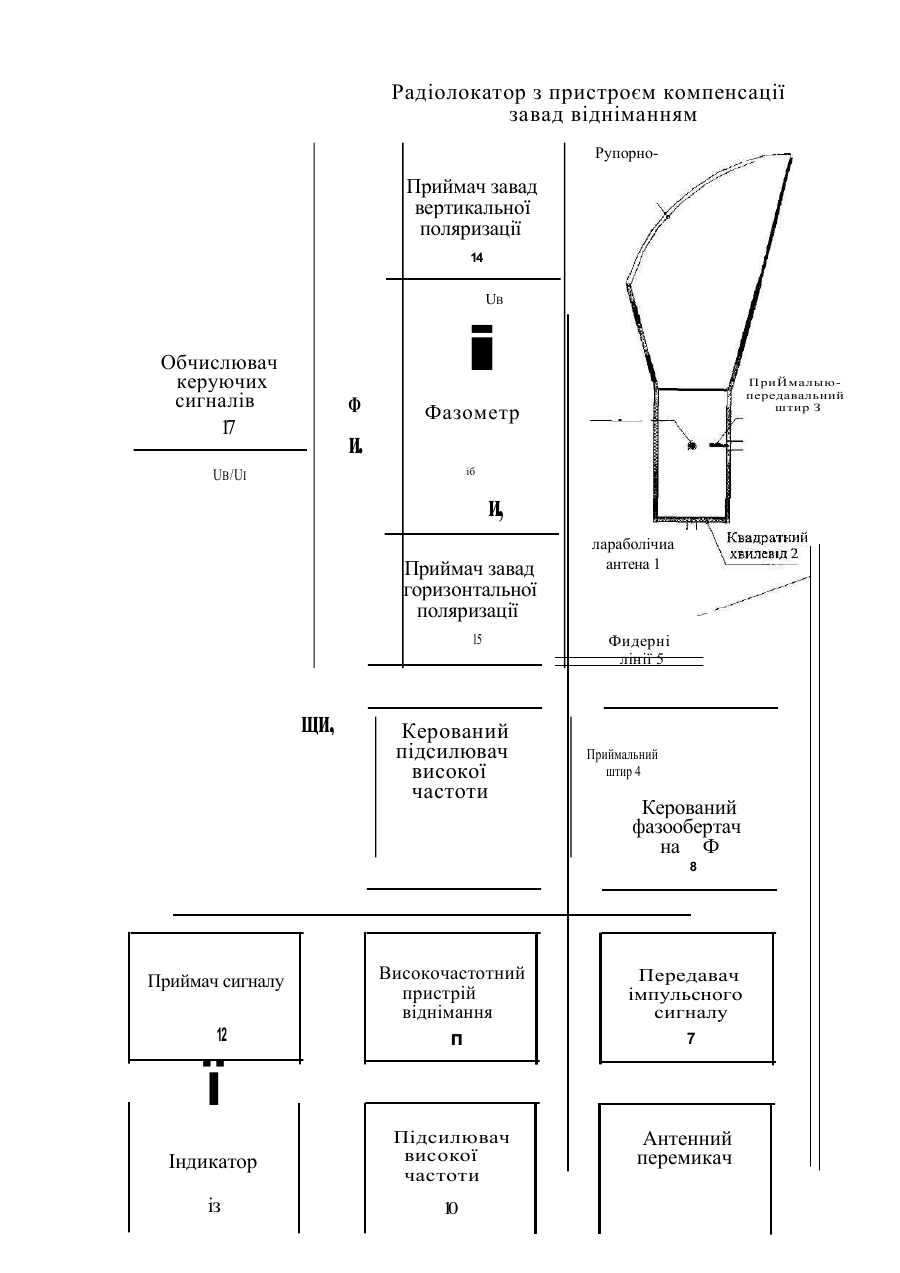
МІЖ* GO IS 7/36 Радіолокатор з пристроєм компенсації завад відніманням Винахід належить до області радіолокації і може бути використаний в імпульсних радіолокаторах мікрохвильового діапазону для захисту від прицільних завад довільної поляризації. Відомий компенсатор радіозавад з кореляційним зворотним зв'язком. Аналог містить два канали прийому, загальний суматор і пристрій обчислення кореляційного моменту із зворотним зв'язком. Завада додаткового компенсаційного каналу використовується в аналозі для подавления завади в основному каналі прийому шляхом протифазного складання в загальному суматорі [1]. Недоліком цього аналогу є те, що він може разом з завадою подавляти також корисний сигнал у випадках, коли завада і сигнал не мають значних часових відмінностей. Аналог може ефективно працювати тільки у випадках, коли завада тривала, а корисний сигнал у вигляді коротких радіоімпульсів, і не може за відсутністю таких часових відмінностей. Як прототип вибрана РЛС із пристроєм компенсації завад відніманням. Принцип компенсації, що використався прототипі, полягає в тому, що з сукупності завади і корисного сигналу віднімається завада, яку приймають по додатковому каналу, а віднімання здійснюють на вІдеочастоті. До складу прототипу входять наступні основні елементи: передавач імпульсного сигналу на несучій частоті мікрохвильового діапазону; приймально-передавальна антена основного каналу з антенним перемикачем "прийом - передача"; приймальна антена допоміжного компенсаційного каналу; два однакових супергетеродинних приймачі з загальним гетеродином (один в основному каналі прийому і інший приймач в компенсаційному каналі прийому); пристрій віднімання вихідних напруг основного і компенсаційного каналів на відеочастоті; індикатор прийнятого сигналу, пов'язаний з виходом пристрою відніманняОбидва приймача прототипу являють собою однакові супергетеродинні приймачі з загальним гетеродином і широким динамічним діапазоном. Кожний з приймачів містить змішувач, логарифмічний підсилювач проміжної частоти і детектор. Приймально-передавальна антена основного каналу прототипу має вузьку діаграму спрямування, а приймальна антена компенсаційного каналу має широку діаграму спрямування, що охоплює бокові пелюстки основної антени. Коли завада приймається по бокових пелюстках діаграми спрямування антени основного каналу, рівень завади в компенсаційному каналі відповідає максимальному рівню бокових пелюсток. Після віднімання завади на відеочастоті завада на виході пристрою віднімання буде значно послаблена, а корисний луна-сигнал буде виділений і надійде на вхід індикатора. Обмежувач знизу (або пороговий пристрій) виключає віднімання корисного луна-сигналу у випадку, коли завада буде відсутня [2]. Недоліком прототипу є те, що він не забезпечує завадозахист у випадку, коли завада приходить по головній пелюстці діаграми спрямування основної антени. У цьому випадку завада в основному каналі виявиться значно більше, ніж в компенсаційному каналі, і пройде на вихід пристрою віднімання. Інший недолік прототипу полягає в тому, що в загальному випадку рівень завад в основному і компенсаційному каналах буде відрізнятися зважаючи на відмінність форми діаграми спрямування компенсаційної антени і форми бокових пелюсток антени основного каналу, а це часто призводить до подавления корисного луна-сигналу разом і з завадою і зриває виявлення цілі. В основу винаходу поставлена задача вдосконалення радіолокатора з пристроєм компенсації завад відніманням, в якому за рахунок використання горизонтальної складової поля завади для подавления вертикальної складової цієї завади при вертикально поляризованому зондуючому сигналі, застосування двоканального вимірювача відношення амплітуд і зсуву фаз складових завади і використання результатів вимірів для вирівнювання амплітуд і фаз складових завади за допомогою керованого підсилювача високої частоти і фазообертача, а також віднімання вирівнених завад на високій частоті в основному каналі прийому забезпечується подавления завади, що покращує зава доз ахищеність радіолокатора від завад довільної (в тому числі і кругової) поляризації навіть за відсутністю просторових і часових відмінностей завади і сигналу. Поставлена задача вирішується тим, що в радіолокаторі з пристроєм компенсації завад відніманням, що містить антенну систему, антенний перемикач і пов'язаний з ним передавач імпульсного сигналу, приймач сигналу, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана у вигляді рупорно-параболічної антени з хвилеводом квадратного перерв у , в якому встановлені два взаємно перпендикулярні штирі, один з яких є приймальним, а інший - приймальнопередавальним і пов'язаний коаксимальною фідерною лінією з антенним перемикачем; до складу радіолокатора додатково включений вимірювач зсуву фаз ер і відношення амплітуд UB/UT завад вертикальної і горизонтальної поляризації, що складається з двох однакових приймачів завад, один з яких пов'язаний з виходом антенного перемикача, а інший - з приймальним штирем, і пов'язаного з цими приймачами фазометра зрушення фаз ер вихідної напруги приймача завад горизонтальної поляризації відносно вихідної напруги приймача завад вертикальної поляризації; до складу радіолокатора включений також зв'язаний з приймальним штирем, що управляється фазообертач на ф і два ідентичних підсилювача високої частоти, виходи яких пов'язані зі входами високочастотного пристрою віднімання, один з цих підсилювачів керований і пов'язаний з виходом що керованого фазообертача, а вхід іншого підсилювача пов'язаний з антенним перемикачем; вихід високочастотного пристрою віднімання пов'язаний з приймачем сигналу, на виході якого встановлений індикатор; на виходах приймачів завад і фазометра додатково встановлений обчислювач керуючих сигналів, один з яких пропорційний показам/е фазометра, а інший дорівнює відношенню амплітуд Цв/Ur завад вертикальної і горизонтальної поляризації або одиниці у випадку, коли рівень завад менше заданого порога, а виходи цього обчислювача пов'язані відповідно зі входами управління фазообертача і керованого підсилювача високої частоти. При цьому керований фазообертач затримує фазу проходячої через нього завади горизонтальної поляризації на величину ер, рівну показаний фазометра, у відповідності з величиною керуючого сигналу, що надходить на вхід управління цього фазообертача. Коефіцієнт підсилення керованого підсилювача високої частоти завад горизонтальної поляризації пропорційний керуючому сигналу з обчислювача, а коефіцієнт підсилення підсилювача високої частоти сигналів І завад вертикальної поляризації постійний і дорівнює коефіцієнту підсилення керованого підсилювача при керуючому сигналі рівному одиниці. Приймачі завад вертикально і горизонтальної поляризації ідентичні і мають однакові коефіцієнти підсилення і фазові характеристики. Технічна сутність і принцип дї і запропонованого пристрою пояснюються фіг. 1, де дається спрощена структурна схема запропонованого радіолокатора і показаний спрощений ескіз його антенної системи. У квадратному хвилеводі рупорно-параболічної антени при прийомі сигналів і завад збуджуються дві основних хвилі типу Н10 із взаємно перпендикулярною поляризацією. До складу запропонованого пристрою на фіг. І входять наступні основні елементи: рупорно-параболічна приймально-передавальна антена 1; хвилевід квадратного перер/зу 2 рупорно-параболічної антени; приймально-передавальний штир 3 для опромінення зондуючого сигналу і прийому луна-сигналу і завад вертикальної поляризації; приймальний штир 4 для прийому завад горизонтальної поляризації; коаксиальні фідерні лінії 5 штирів 3,4; антенний перемикач 6 для переключення приймально-передавального штиря 3 рупоно-параболічної антени з прийому на передачу; передавач 7 імпульсного сигналу у вигляді зондуючих радіоімпульсів на несучій частоті мікрохвильового діапазону; керований фазообертач 8 завад горизонтальної поляризації, вхід якого пов'язаний коаксиального фідерною лінією з приймальним штирем 4; керований підсилювач високої частоти 9 завад горизонтальної поляризації; підсилювач високої частоти 10 сигналів і завад вертикальної поляризації; високочастотний пристрій віднімання 11 завад з виходів підсилювачів високої частоти 9, 10; приймач сигналу 12, вхід якого пов'язаний з виходом пристрою віднімання 11; індикатор 13 імпульсних луна-сигналів цілі; приймач завад вертикальної поляризації 14, вхід якого пов'язаний з виходом антенного перемикача 6; приймач завад горизонтальної поляризації 15, вхід якого пов'язаний коаксиальною фідерною лінією з приймальним штирем 4; фазометр 16 зсуву фаз
ДивитисяДодаткова інформація
Автори англійськоюKudryk Andrii Mykolaiovych, Proroshyn Serhii Mykhailovych, Bakhvalov Valentyn Borysovych
Автори російськоюКудрик Андрей Николаевич, Пророшин Сергей Михайлович, Бахвалов Валентин Борисович
МПК / Мітки
МПК: G01S 7/36
Мітки: радіолокатор, відніманням, завад, пристроєм, компенсації
Код посилання
<a href="https://ua.patents.su/13-32194-radiolokator-z-pristroehm-kompensaci-zavad-vidnimannyam.html" target="_blank" rel="follow" title="База патентів України">Радіолокатор з пристроєм компенсації завад відніманням</a>
Радіолокатор з пристроєм компенсації завад
Номер патенту: 32193
Опубліковано: 15.12.2000
Автори: Кудрик Андрій Миколайович, Бахвалов Валентин Борисович, Пророшин Сергій Михайлович
МПК: G01S 7/36
Мітки: завад, пристроєм, радіолокатор, компенсації
Текст:
...пристрої використовуються поляризаційні відмінності завади і луна-сигналу цілі. Випромінюється зондуючий сигнал горизонтальної поляризації і луна-сигнал цілі також має в основному горизонтальну поляризацію. Припускається, що завада має лінійну поляризацію і містить як горизонтальну, так і вертикальну складові поля. Фази цих складових однакові, а амплітуди можуть відрізнятися, але не дуже сильно. Запропонований пристрій призначений для...
Радіолокатор з пристроєм захисту від прицільних завад
Номер патенту: 32190
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Пророшин Сергій Михайлович, Кудрик Андрій Миколайович
МПК: G01S 7/36
Мітки: завад, радіолокатор, захисту, прицільних, пристроєм
Текст:
...засновано на управлінні поляризацією випромінюваних і приймальних сигналів таким чином, щоб поляризаційні параметри сигналу суттєво відрізнялися від виміряних поляризаційних характеристик завад, що ускладнює попадання завад в основний канал прийому. Технічна сутність і принцип дії запропонованого пристрою пояснюються фіг. 1,2. На фіг. 1 дана спрощена структурна схема запропонованого радіолокатора. На фіг.2 показаний спрощений ескіз...
Радіолокатор з компенсатором завад по бокових пелюстках діаграми спрямування антени
Номер патенту: 32192
Опубліковано: 15.12.2000
Автори: Кудрик Андрій Миколайович, Пророшин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 7/36
Мітки: антени, пелюстках, діаграми, бокових, спрямування, радіолокатор, завад, компенсатором
Текст:
...з компенсатором завад по бокових пелюстках діаграми спрямування антени, що містить антенну систему з основної приймально-передавальної антени з антенним перемикачем і компенсаційну приймальну антену, передавач імпульсного сигналу, приймачі, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана з однакових рознесених вздовж осі системи антен, перша з яких є основною, а друга - компенсаційною; до складу...
Бортовий радіолокатор підповерхневого зондування з пристроєм захисту від пасивних перешкод
Номер патенту: 17472
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: пристроєм, радіолокатор, зондування, захисту, перешкод, пасивних, бортовий, підповерхневого
Формула / Реферат:
Бортовой радиолокатор подповерхностного зондирования с устройством защиты от пассивных помех, содержащий бортовую приемо-передающую антенну, ось которой направлена вертикально вниз, антенный переключатель, передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что на выходе приемника установлен широкополосный усилитель видеоимпульсов с входным и выходным устройствами...
Спосіб компенсації завад лінійного чотириполюсника і пристрій для його здійснення
Номер патенту: 22888
Опубліковано: 05.05.1998
Автор: Макаренко Олександр Сергійович
МПК: H04B 1/10
Мітки: лінійного, пристрій, завад, компенсації, здійснення, спосіб, чотириполюсника
Формула / Реферат:
1. Способ компенсации помех линейного четырехполюсника, согласно которому формируют основной канал, реагирующий на смесь сигнала и помехи, и компенсационный канал, реагирующий только на помеху, устанавливают одинаковые интенсивности и противоположные фазы помех в каналах, суммируют полученные колебания, отличающийся тем, что при формировании каналов осуществляют выборки из смеси сигнала и помехи и отдельно помехи с частотой, определяемой...
Попередній патент: Радіолокатор з пристроєм компенсації завад
Наступний патент: Вібраторна антенна решітка з кутиковим рефлектором
Випадковий патент: Спосіб хіміко-фотографічної обробки довгомірних галогеносрібних фото- та кіноплівок