Система управління та контролю параметрів газотурбінного двигуна
Номер патенту: 38854
Опубліковано: 15.08.2003
Автори: Ісак Омелян Гаврилович, БЕЗСЧАСТНИЙ Василь Олексійович

Формула / Реферат
Система управління та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, з'єднаний з блоком управління переналагодженням, блоком формування відмови, блоком n - входових елементів І, вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднаний з блоком сигналів дозволу, вихід блока контролю з'єднаний з блоком сигналізаторів, блоком елементів І та елементом АБО, вихід якого з'єднаний з лічильником та елементом І, другий вхід якого з'єднаний з виходом лічильника, а другий та третій входи якого безпосередньо та через елемент НІ з'єднані з програмним блоком, дванадцятий вихід якого через блоки змінення мінімального та максимального рівнів налагодження та блок елементів АБО з'єднаний з блоком сигналізаторів, десятий вихід програмного блока з'єднаний з блоком управління переналагодженням, виходи якого безпосередньо з'єднані з блоками змінення мінімального та максимального рівнів налагодження та блоком елементів І, останній вхід якого з'єднаний з виходом елемента НІ і одним з входів блока зв'язку з виконавчими елементами, вихід блока елементів І через блок формування відмови з'єднаний з блоком n - входових елементів І та елементів АБО, решта входів якого з'єднана з виходами блока контролю датчика та блока відмови обертів, який по тому ж ланцюгу з'єднаний з входом другого блока елементів І, вхідний ланцюг системи, від датчика обертів, з'єднаний з входом блока контролю датчика та блока вимірювання обертів, перший вихід якого з'єднаний з блоком сигналів дозволу, блоком відмови обертів та другим блоком елементів І, а другий - з програмним блоком, шостий вихід якого через задатчик контрольної частоти з'єднаний з блоком вимірювання обертів, решта входів якого з'єднана з блоком сигналів дозволу, блоком контролю датчика та програмним блоком, решта виходів якого з'єднана з блоком n- входових елементів І, блоком формування відмови, другим блоком елементів І, блоком відмови обертів, блоком сигналів дозволу, блоком зв'язку з виконавчими елементами, останній вхід якого з'єднаний з виходом другого блока елементів І, а останній вхід другого блока елементів І з'єднаний з другим виходом блока сигналів дозволу, вихід елемента І та другий вихід блока зв'язку з виконавчими елементами є виходами системи, а третій вхід блока сигналізаторів є другим входом системи, вхід перетворювача частота-код з'єднаний з останнім виходом блока вимірювання обертів, вхід комутатора з'єднаний звиходом блока сигналізаторів, а вихід - з аналого-цифровим перетворювачем, перший і другий входи шинного формувача з'єднані з виходами блока контролю та блока контролю датчика відповідно, перший вихід операційного блока з'єднано з другим входом комутатора, аналого-цифровий перетворювач, шинний формувач, перетворювач частота-код та блок пам'яті з'єднані входами-виходами з операційним блоком, вхід блока контролю з'єднаний з виходом блока сигналізаторів, вихід якого з'єднаний також з першими входами блока запуску та другого блока сигналів дозволу, вихід якого, в свою чергу, через блок запуску з'єднаний з другим входом програмного блока, останній вихід якого з'єднаний з другим входом другого блока сигналів дозволу, останній вхід другого блока сигналів дозволу з'єднаний з останнім виходом блока формувачів установки, а другий вихід другого блока сигналів дозволу з'єднаний з останнім входом блока n -входових елементів І, яка відрізняється тим, що в систему додатково введені блок управління видачею команд, входи якого з'єднані з додатковими виходами блока вимірювання обертів та операційного блока, а вихід - з блоком зв'язку з виконавчими елементами, та блок контролю команд управління, з'єднаний виходом блока зв'язку з виконавчими елементами, з'єднаними виконавчими елементами і входами - виходами операційного блока, останній вихід якого є останнім виходом системи.
Текст
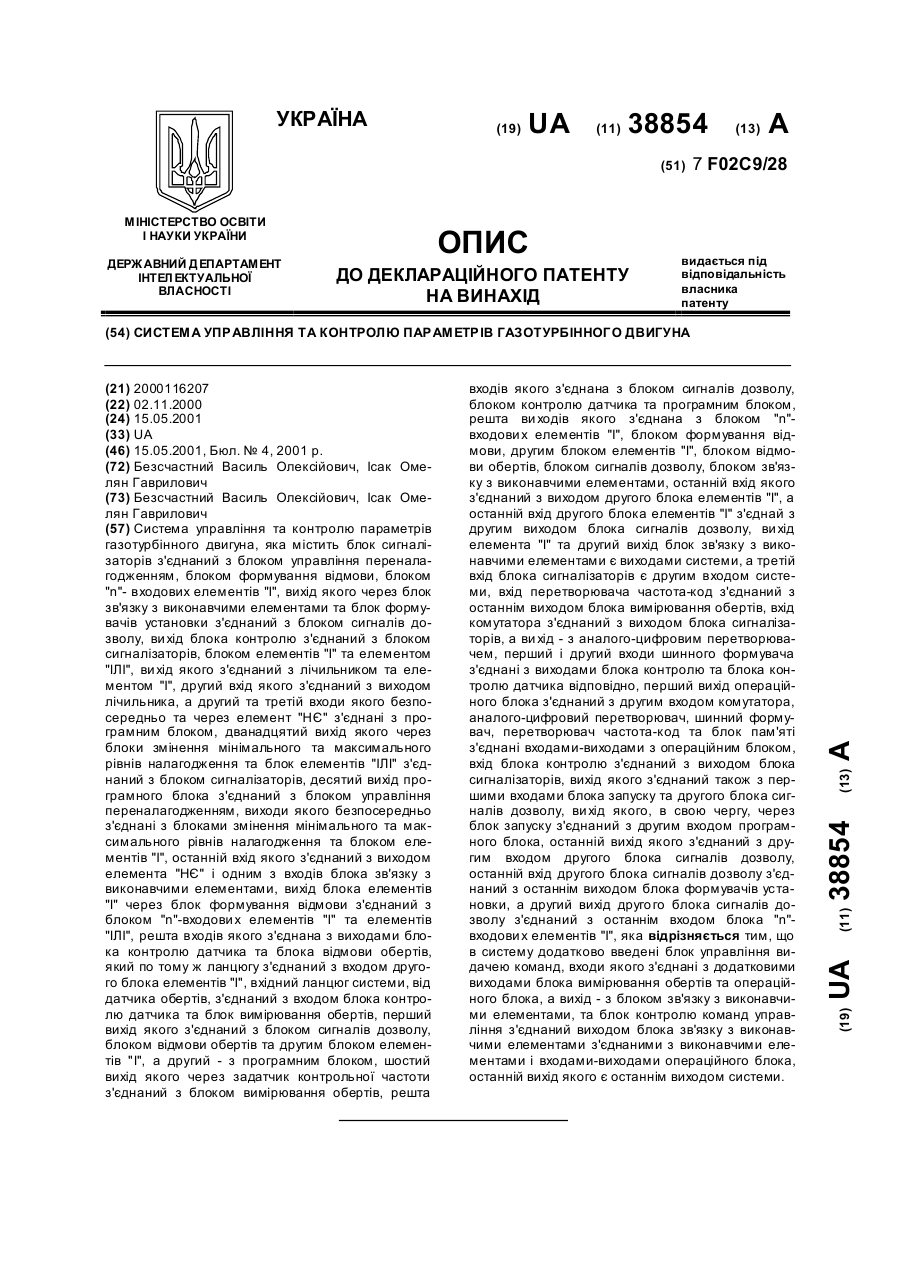
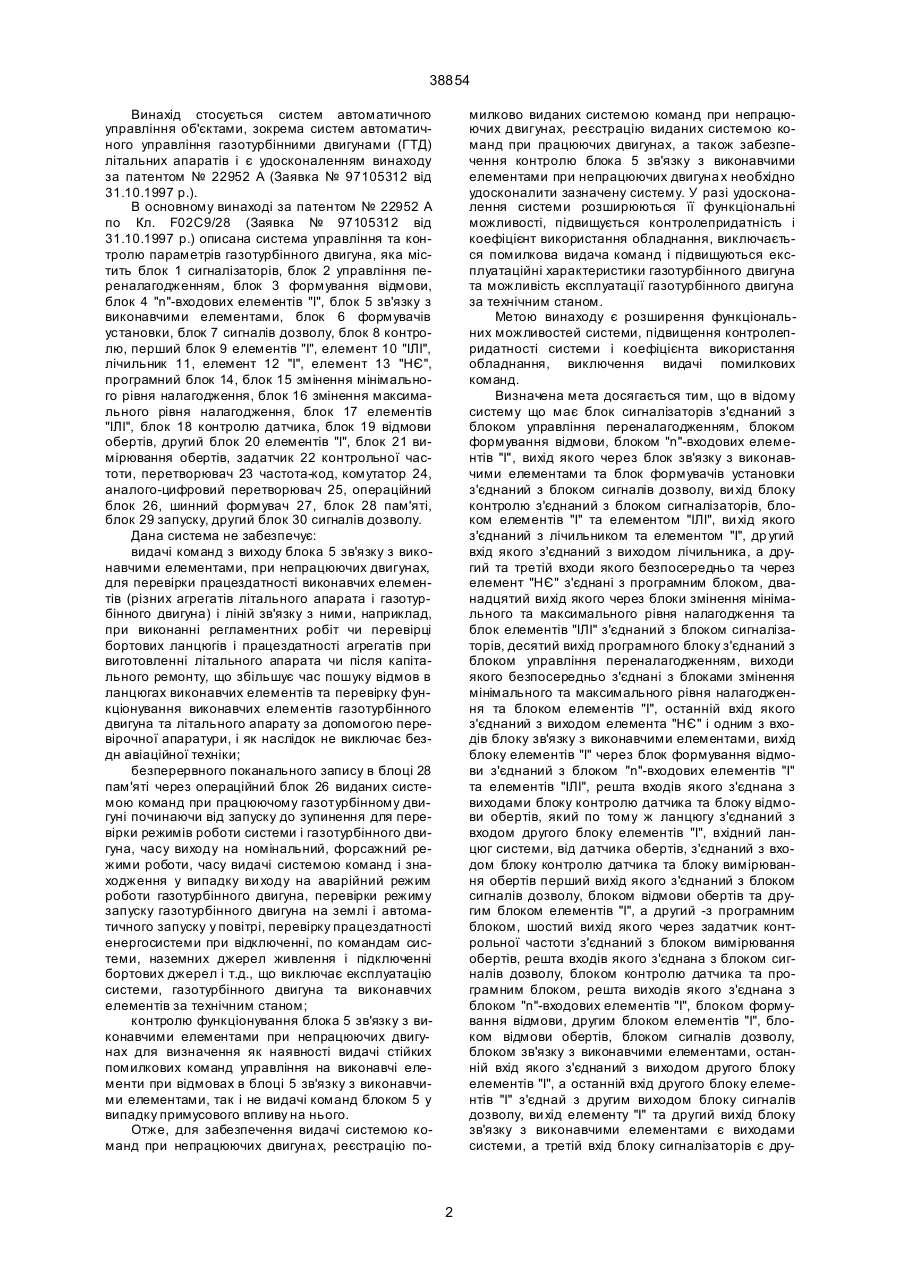
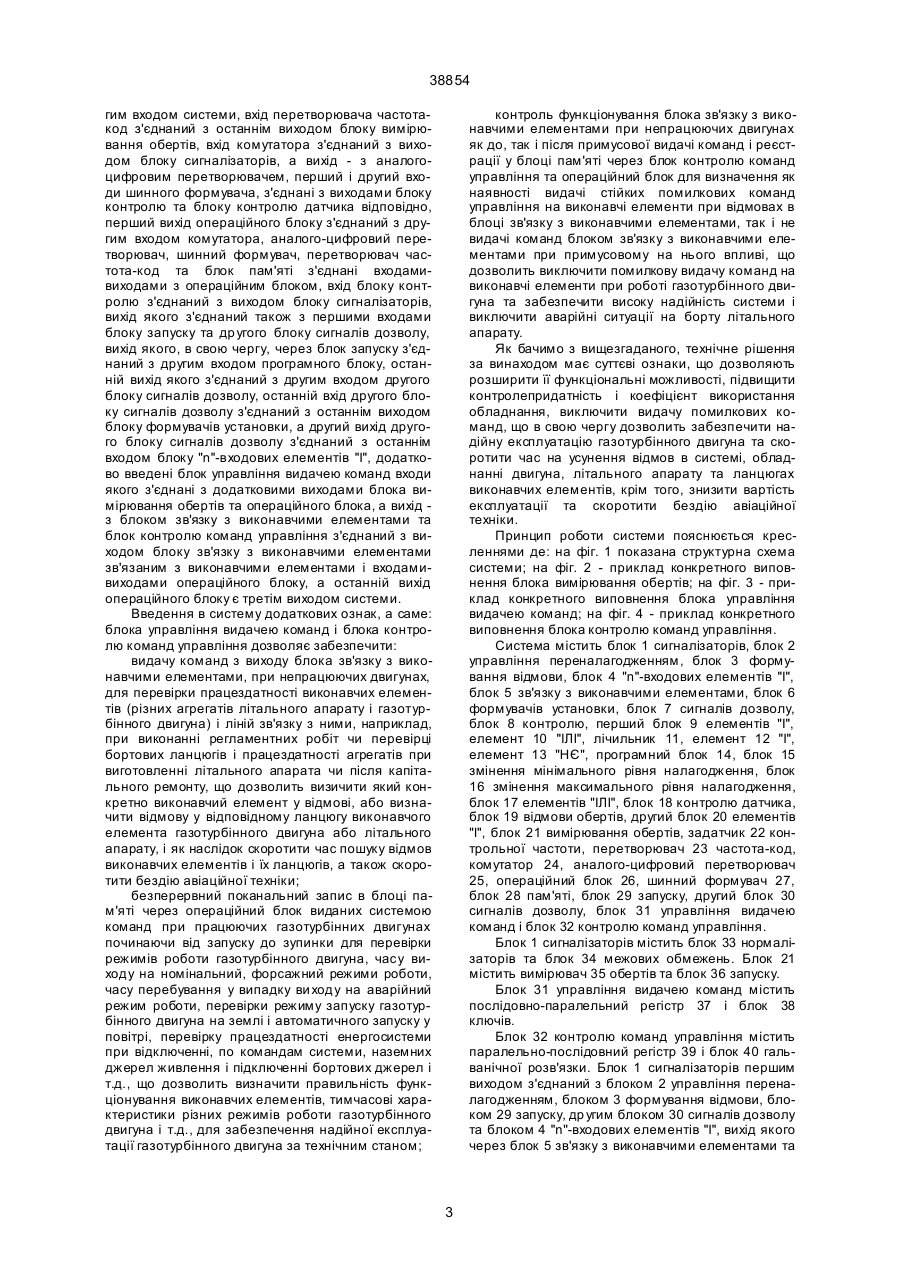
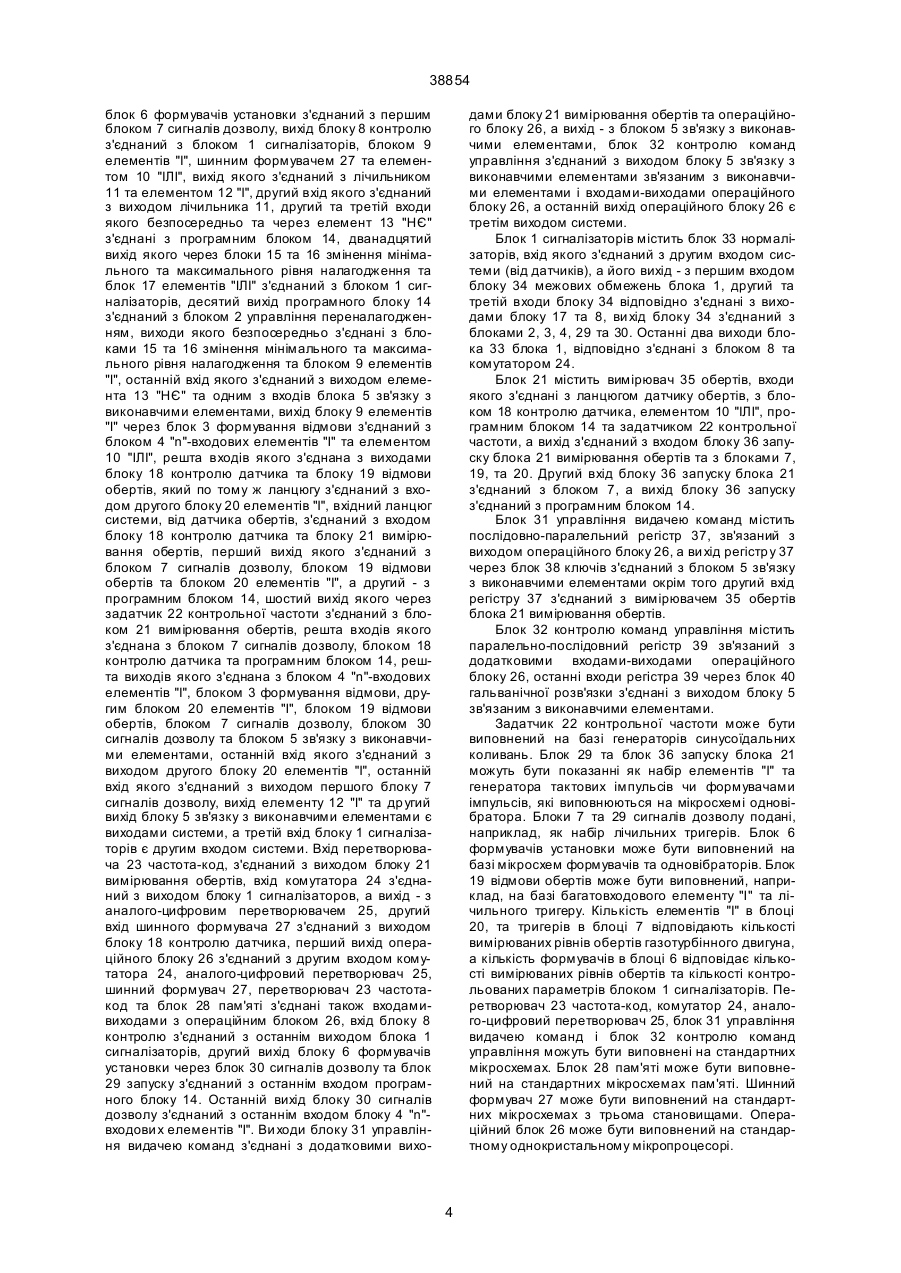
Система управління та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів з'єднаний з блоком управління переналагодженням, блоком формування відмови, блоком "n"- входових елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднаний з блоком сигналів дозволу, ви хід блока контролю з'єднаний з блоком сигналізаторів, блоком елементів "І" та елементом "ІЛІ", ви хід якого з'єднаний з лічильником та елементом "І", другий вхід якого з'єднаний з виходом лічильника, а другий та третій входи якого безпосередньо та через елемент "НЄ" з'єднані з програмним блоком, дванадцятий вихід якого через блоки змінення мінімального та максимального рівнів налагодження та блок елементів "ІЛІ" з'єднаний з блоком сигналізаторів, десятий вихід програмного блока з'єднаний з блоком управління переналагодженням, виходи якого безпосередньо з'єднані з блоками змінення мінімального та максимального рівнів налагодження та блоком елементів "І", останній вхід якого з'єднаний з виходом елемента "НЄ" і одним з входів блока зв'язку з виконавчими елементами, вихід блока елементів "І" через блок формування відмови з'єднаний з блоком "n"-входови х елементів "І" та елементів "ІЛІ", решта входів якого з'єднана з виходами блока контролю датчика та блока відмови обертів, який по тому ж ланцюгу з'єднаний з входом другого блока елементів "І", вхідний ланцюг системи, від датчика обертів, з'єднаний з входом блока контролю датчика та блок вимірювання обертів, перший вихід якого з'єднаний з блоком сигналів дозволу, блоком відмови обертів та другим блоком елементів "І", а другий - з програмним блоком, шостий вихід якого через задатчик контрольної частоти з'єднаний з блоком вимірювання обертів, решта A (54) СИСТЕМА УПРАВЛІННЯ ТА КОНТРОЛЮ ПАРАМЕТРІВ ГАЗОТУРБІННОГО ДВИГУНА 38854 Винахід стосується систем автоматичного управління об'єктами, зокрема систем автоматичного управління газотурбінними двигунами (ГТД) літальних апаратів і є удосконаленням винаходу за патентом № 22952 А (Заявка № 97105312 від 31.10.1997 p.). В основному винаході за патентом № 22952 А по Кл. F02C9/28 (Заявка № 97105312 від 31.10.1997 p.) описана система управління та контролю параметрів газотурбінного двигуна, яка містить блок 1 сигналізаторів, блок 2 управління переналагодженням, блок 3 формування відмови, блок 4 "n"-входових елементів "І", блок 5 зв'язку з виконавчими елементами, блок 6 формувачів установки, блок 7 сигналів дозволу, блок 8 контролю, перший блок 9 елементів "І", елемент 10 "ІЛІ", лічильник 11, елемент 12 "І", елемент 13 "НЄ", програмний блок 14, блок 15 змінення мінімального рівня налагодження, блок 16 змінення максимального рівня налагодження, блок 17 елементів "ІЛІ", блок 18 контролю датчика, блок 19 відмови обертів, другий блок 20 елементів "І", блок 21 вимірювання обертів, задатчик 22 контрольної частоти, перетворювач 23 частота-код, комутатор 24, аналого-цифровий перетворювач 25, операційний блок 26, шинний формувач 27, блок 28 пам'яті, блок 29 запуску, другий блок 30 сигналів дозволу. Дана система не забезпечує: видачі команд з виходу блока 5 зв'язку з виконавчими елементами, при непрацюючих двигунах, для перевірки працездатності виконавчих елементів (різних агрегатів літального апарата і газотурбінного двигуна) і ліній зв'язку з ними, наприклад, при виконанні регламентних робіт чи перевірці бортових ланцюгів і працездатності агрегатів при виготовленні літального апарата чи після капітального ремонту, що збільшує час пошуку відмов в ланцюгах виконавчих елементів та перевірку функціонування виконавчих елементів газотурбінного двигуна та літального апарату за допомогою перевірочної апаратури, і як наслідок не виключає бездн авіаційної техніки; безперервного поканального запису в блоці 28 пам'яті через операційний блок 26 виданих системою команд при працюючому газотурбінному двигуні починаючи від запуску до зупинення для перевірки режимів роботи системи і газотурбінного двигуна, часу виходу на номінальний, форсажний режими роботи, часу видачі системою команд і знаходження у випадку ви ходу на аварійний режим роботи газотурбінного двигуна, перевірки режиму запуску газотурбінного двигуна на землі і автоматичного запуску у повітрі, перевірку працездатності енергосистеми при відключенні, по командам системи, наземних джерел живлення і підключенні бортових джерел і т.д., що виключає експлуатацію системи, газотурбінного двигуна та виконавчих елементів за технічним станом; контролю функціонування блока 5 зв'язку з виконавчими елементами принепрацюючих двигунах для визначення як наявності видачі стійких помилкових команд управління на виконавчі елементи при відмовах в блоці 5 зв'язку з виконавчими елементами, так і не видачі команд блоком 5 у випадку примусового впливу на нього. Отже, для забезпечення видачі системою команд при непрацюючих двигуна х, реєстрацію по милково виданих системою команд при непрацюючих двигунах, реєстрацію виданих системою команд при працюючих двигунах, а також забезпечення контролю блока 5 зв'язку з виконавчими елементами при непрацюючих двигуна х необхідно удосконалити зазначену систему. У разі удосконалення системи розширюються її функціональні можливості, підвищується контролепридатність і коефіцієнт використання обладнання, виключається помилкова видача команд і підвищуються експлуатаційні характеристики газотурбінного двигуна та можливість експлуатації газотурбінного двигуна за технічним станом. Метою винаходу є розширення функціональних можливостей системи, підвищення контролепридатності системи і коефіцієнта використання обладнання, виключення видачі помилкових команд. Визначена мета досягається тим, що в відому систему що має блок сигналізаторів з'єднаний з блоком управління переналагодженням, блоком формування відмови, блоком "n"-входових елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднаний з блоком сигналів дозволу, ви хід блоку контролю з'єднаний з блоком сигналізаторів, блоком елементів "І" та елементом "ІЛІ", ви хід якого з'єднаний з лічильником та елементом "І", др угий вхід якого з'єднаний з виходом лічильника, а другий та третій входи якого безпосередньо та через елемент "НЄ" з'єднані з програмним блоком, дванадцятий вихід якого через блоки змінення мінімального та максимального рівня налагодження та блок елементів "ІЛІ" з'єднаний з блоком сигналізаторів, десятий вихід програмного блоку з'єднаний з блоком управління переналагодженням, виходи якого безпосередньо з'єднані з блоками змінення мінімального та максимального рівня налагодження та блоком елементів "І", останній вхід якого з'єднаний з виходом елемента "НЄ" і одним з входів блоку зв'язку з виконавчими елементами, вихід блоку елементів "І" через блок формування відмови з'єднаний з блоком "n"-входових елементів "І" та елементів "ІЛІ", решта входів якого з'єднана з виходами блоку контролю датчика та блоку відмови обертів, який по тому ж ланцюгу з'єднаний з входом другого блоку елементів "І", вхідний ланцюг системи, від датчика обертів, з'єднаний з входом блоку контролю датчика та блоку вимірювання обертів перший вихід якого з'єднаний з блоком сигналів дозволу, блоком відмови обертів та другим блоком елементів "І", а другий -з програмним блоком, шостий вихід якого через задатчик контрольної частоти з'єднаний з блоком вимірювання обертів, решта входів якого з'єднана з блоком сигналів дозволу, блоком контролю датчика та програмним блоком, решта виходів якого з'єднана з блоком "n"-входових елементів "І", блоком формування відмови, другим блоком елементів "І", блоком відмови обертів, блоком сигналів дозволу, блоком зв'язку з виконавчими елементами, останній вхід якого з'єднаний з виходом другого блоку елементів "І", а останній вхід другого блоку елементів "І" з'єднай з другим виходом блоку сигналів дозволу, ви хід елементу "І" та другий вихід блоку зв'язку з виконавчими елементами є виходами системи, а третій вхід блоку сигналізаторів є дру 2 38854 гим входом системи, вхід перетворювача частотакод з'єднаний з останнім виходом блоку вимірювання обертів, вхід комутатора з'єднаний з виходом блоку сигналізаторів, а вихід - з аналогоцифровим перетворювачем, перший і другий входи шинного формувача, з'єднані з виходами блоку контролю та блоку контролю датчика відповідно, перший вихід операційного блоку з'єднаний з другим входом комутатора, аналого-цифровий перетворювач, шинний формувач, перетворювач частота-код та блок пам'яті з'єднані входамивиходами з операційним блоком, вхід блоку контролю з'єднаний з виходом блоку сигналізаторів, вихід якого з'єднаний також з першими входами блоку запуску та др угого блоку сигналів дозволу, вихід якого, в свою чергу, через блок запуску з'єднаний з другим входом програмного блоку, останній вихід якого з'єднаний з другим входом другого блоку сигналів дозволу, останній вхід другого блоку сигналів дозволу з'єднаний з останнім виходом блоку формувачів установки, а другий вихід другого блоку сигналів дозволу з'єднаний з останнім входом блоку "n"-входових елементів "І", додатково введені блок управління видачею команд входи якого з'єднані з додатковими виходами блока вимірювання обертів та операційного блока, а вихід з блоком зв'язку з виконавчими елементами та блок контролю команд управління з'єднаний з виходом блоку зв'язку з виконавчими елементами зв'язаним з виконавчими елементами і входамивиходами операційного блоку, а останній вихід операційного блоку є третім виходом системи. Введення в систему додаткових ознак, а саме: блока управління видачею команд і блока контролю команд управління дозволяє забезпечити: видачу команд з виходу блока зв'язку з виконавчими елементами, при непрацюючих двигунах, для перевірки працездатності виконавчих елементів (різних агрегатів літального апарату і газотурбінного двигуна) і ліній зв'язку з ними, наприклад, при виконанні регламентних робіт чи перевірці бортових ланцюгів і працездатності агрегатів при виготовленні літального апарата чи після капітального ремонту, що дозволить визичити який конкретно виконавчий елемент у відмові, або визначити відмову у відповідному ланцюгу виконавчого елемента газотурбінного двигуна або літального апарату, і як наслідок скоротити час пошуку відмов виконавчих елементів і їх ланцюгів, а також скоротити бездію авіаційної техніки; безперервний поканальний запис в блоці пам'яті через операційний блок виданих системою команд при працюючих газотурбінних двигунах починаючи від запуску до зупинки для перевірки режимів роботи газотурбінного двигуна, часу виходу на номінальний, форсажний режими роботи, часу перебування у випадку ви ходу на аварійний режим роботи, перевірки режиму запуску газотурбінного двигуна на землі і автоматичного запуску у повітрі, перевірку працездатності енергосистеми при відключенні, по командам системи, наземних джерел живлення і підключенні бортових джерел і т.д., що дозволить визначити правильність функціонування виконавчих елементів, тимчасові характеристики різних режимів роботи газотурбінного двигуна і т.д., для забезпечення надійної експлуатації газотурбінного двигуна за технічним станом; контроль функціонування блока зв'язку з виконавчими елементами при непрацюючих двигунах як до, так і після примусової видачі команд і реєстрації у блоці пам'яті через блок контролю команд управління та операційний блок для визначення як наявності видачі стійких помилкових команд управління на виконавчі елементи при відмовах в блоці зв'язку з виконавчими елементами, так і не видачі команд блоком зв'язку з виконавчими елементами при примусовому на нього впливі, що дозволить виключити помилкову видачу команд на виконавчі елементи при роботі газотурбінного двигуна та забезпечити високу надійність системи і виключити аварійні ситуації на борту літального апарату. Як бачимо з вищезгаданого, технічне рішення за винаходом має суттєві ознаки, що дозволяють розширити її функціональні можливості, підвищити контролепридатність і коефіцієнт використання обладнання, виключити видачу помилкових команд, що в свою чергу дозволить забезпечити надійну експлуатацію газотурбінного двигуна та скоротити час на усунення відмов в системі, обладнанні двигуна, літального апарату та ланцюгах виконавчих елементів, крім того, знизити вартість експлуатації та скоротити бездію авіаційної техніки. Принцип роботи системи пояснюється кресленнями де: на фіг. 1 показана структурна схема системи; на фіг. 2 - приклад конкретного виповнення блока вимірювання обертів; на фіг. 3 - приклад конкретного виповнення блока управління видачею команд; на фіг. 4 - приклад конкретного виповнення блока контролю команд управління. Система містить блок 1 сигналізаторів, блок 2 управління переналагодженням, блок 3 формування відмови, блок 4 "n"-входових елементів "І", блок 5 зв'язку з виконавчими елементами, блок 6 формувачів установки, блок 7 сигналів дозволу, блок 8 контролю, перший блок 9 елементів "І", елемент 10 "ІЛІ", лічильник 11, елемент 12 "І", елемент 13 "НЄ", програмний блок 14, блок 15 змінення мінімального рівня налагодження, блок 16 змінення максимального рівня налагодження, блок 17 елементів "ІЛІ", блок 18 контролю датчика, блок 19 відмови обертів, другий блок 20 елементів "І", блок 21 вимірювання обертів, задатчик 22 контрольної частоти, перетворювач 23 частота-код, комутатор 24, аналого-цифровий перетворювач 25, операційний блок 26, шинний формувач 27, блок 28 пам'яті, блок 29 запуску, другий блок 30 сигналів дозволу, блок 31 управління видачею команд і блок 32 контролю команд управління. Блок 1 сигналізаторів містить блок 33 нормалізаторів та блок 34 межових обмежень. Блок 21 містить вимірювач 35 обертів та блок 36 запуску. Блок 31 управління видачею команд містить послідовно-паралельний регістр 37 і блок 38 ключів. Блок 32 контролю команд управління містить паралельно-послідовний регістр 39 і блок 40 гальванічної розв'язки. Блок 1 сигналізаторів першим виходом з'єднаний з блоком 2 управління переналагодженням, блоком 3 формування відмови, блоком 29 запуску, др угим блоком 30 сигналів дозволу та блоком 4 "n''-входових елементів "І", вихід якого через блок 5 зв'язку з виконавчими елементами та 3 38854 блок 6 формувачів установки з'єднаний з першим блоком 7 сигналів дозволу, вихід блоку 8 контролю з'єднаний з блоком 1 сигналізаторів, блоком 9 елементів "І", шинним формувачем 27 та елементом 10 "ІЛІ", вихід якого з'єднаний з лічильником 11 та елементом 12 "І", другий вхід якого з'єднаний з виходом лічильника 11, другий та третій входи якого безпосередньо та через елемент 13 "НЄ" з'єднані з програмним блоком 14, дванадцятий вихід якого через блоки 15 та 16 змінення мінімального та максимального рівня налагодження та блок 17 елементів "ІЛІ" з'єднаний з блоком 1 сигналізаторів, десятий вихід програмного блоку 14 з'єднаний з блоком 2 управління переналагодженням, виходи якого безпосередньо з'єднані з блоками 15 та 16 змінення мінімального та максимального рівня налагодження та блоком 9 елементів "І", останній вхід якого з'єднаний з виходом елемента 13 "НЄ" та одним з входів блока 5 зв'язку з виконавчими елементами, вихід блоку 9 елементів "І" через блок 3 формування відмови з'єднаний з блоком 4 "n"-входових елементів "І" та елементом 10 "ІЛІ", решта входів якого з'єднана з виходами блоку 18 контролю датчика та блоку 19 відмови обертів, який по тому ж ланцюгу з'єднаний з входом другого блоку 20 елементів "І", вхідний ланцюг системи, від датчика обертів, з'єднаний з входом блоку 18 контролю датчика та блоку 21 вимірювання обертів, перший вихід якого з'єднаний з блоком 7 сигналів дозволу, блоком 19 відмови обертів та блоком 20 елементів "І", а другий - з програмним блоком 14, шостий вихід якого через задатчик 22 контрольної частоти з'єднаний з блоком 21 вимірювання обертів, решта входів якого з'єднана з блоком 7 сигналів дозволу, блоком 18 контролю датчика та програмним блоком 14, решта виходів якого з'єднана з блоком 4 "n''-входових елементів "І", блоком 3 формування відмови, другим блоком 20 елементів "І", блоком 19 відмови обертів, блоком 7 сигналів дозволу, блоком 30 сигналів дозволу та блоком 5 зв'язку з виконавчими елементами, останній вхід якого з'єднаний з виходом другого блоку 20 елементів "І", останній вхід якого з'єднаний з виходом першого блоку 7 сигналів дозволу, вихід елементу 12 "І" та др угий вихід блоку 5 зв'язку з виконавчими елементами є виходами системи, а третій вхід блоку 1 сигналізаторів є другим входом системи. Вхід перетворювача 23 частота-код, з'єднаний з виходом блоку 21 вимірювання обертів, вхід комутатора 24 з'єднаний з виходом блоку 1 сигналізаторов, а вихід - з аналого-цифровим перетворювачем 25, другий вхід шинного формувача 27 з'єднаний з виходом блоку 18 контролю датчика, перший вихід операційного блоку 26 з'єднаний з другим входом комутатора 24, аналого-цифровий перетворювач 25, шинний формувач 27, перетворювач 23 частотакод та блок 28 пам'яті з'єднані також входамивиходами з операційним блоком 26, вхід блоку 8 контролю з'єднаний з останнім виходом блока 1 сигналізаторів, другий вихід блоку 6 формувачів установки через блок 30 сигналів дозволу та блок 29 запуску з'єднаний з останнім входом програмного блоку 14. Останній вихід блоку 30 сигналів дозволу з'єднаний з останнім входом блоку 4 "n''входови х елементів "І". Ви ходи блоку 31 управління видачею команд з'єднані з додатковими вихо дами блоку 21 вимірювання обертів та операційного блоку 26, а вихід - з блоком 5 зв'язку з виконавчими елементами, блок 32 контролю команд управління з'єднаний з виходом блоку 5 зв'язку з виконавчими елементами зв'язаним з виконавчими елементами і входами-виходами операційного блоку 26, а останній вихід операційного блоку 26 є третім виходом системи. Блок 1 сигналізаторів містить блок 33 нормалізаторів, вхід якого з'єднаний з другим входом системи (від датчиків), а його вихід - з першим входом блоку 34 межових обмежень блока 1, другий та третій входи блоку 34 відповідно з'єднані з виходами блоку 17 та 8, ви хід блоку 34 з'єднаний з блоками 2, 3, 4, 29 та 30. Останні два виходи блока 33 блока 1, відповідно з'єднані з блоком 8 та комутатором 24. Блок 21 містить вимірювач 35 обертів, входи якого з'єднані з ланцюгом датчику обертів, з блоком 18 контролю датчика, елементом 10 "ІЛІ", програмним блоком 14 та задатчиком 22 контрольної частоти, а вихід з'єднаний з входом блоку 36 запуску блока 21 вимірювання обертів та з блоками 7, 19, та 20. Другий вхід блоку 36 запуску блока 21 з'єднаний з блоком 7, а вихід блоку 36 запуску з'єднаний з програмним блоком 14. Блок 31 управління видачею команд містить послідовно-паралельний регістр 37, зв'язаний з виходом операційного блоку 26, а ви хід регістр у 37 через блок 38 ключів з'єднаний з блоком 5 зв'язку з виконавчими елементами окрім того другий вхід регістру 37 з'єднаний з вимірювачем 35 обертів блока 21 вимірювання обертів. Блок 32 контролю команд управління містить паралельно-послідовний регістр 39 зв'язаний з додатковими входами-виходами операційного блоку 26, останні входи регістра 39 через блок 40 гальванічної розв'язки з'єднані з виходом блоку 5 зв'язаним з виконавчими елементами. Задатчик 22 контрольної частоти може бути виповнений на базі генераторів синусоїдальних коливань. Блок 29 та блок 36 запуску блока 21 можуть бути показанні як набір елементів "І" та генератора тактових імпульсів чи формувачами імпульсів, які виповнюються на мікросхемі одновібратора. Блоки 7 та 29 сигналів дозволу подані, наприклад, як набір лічильних тригерів. Блок 6 формувачів установки може бути виповнений на базі мікросхем формувачів та одновібраторів. Блок 19 відмови обертів може бути виповнений, наприклад, на базі багатовходового елементу "І" та лічильного тригеру. Кількість елементів "І" в блоці 20, та тригерів в блоці 7 відповідають кількості вимірюваних рівнів обертів газотурбінного двигуна, а кількість формувачів в блоці 6 відповідає кількості вимірюваних рівнів обертів та кількості контрольованих параметрів блоком 1 сигналізаторів. Перетворювач 23 частота-код, комутатор 24, аналого-цифровий перетворювач 25, блок 31 управління видачею команд і блок 32 контролю команд управління можуть бути виповнені на стандартних мікросхемах. Блок 28 пам'яті може бути виповнений на стандартних мікросхемах пам'яті. Шинний формувач 27 може бути виповнений на стандартних мікросхемах з трьома становищами. Операційний блок 26 може бути виповнений на стандартному однокристальному мікропроцесорі. 4 38854 Програмний блок 14 може працювати як за сигналами запуску з блоків 29 запуску та 21 вимірювання обертів, так і за командами запиту автоматизованої системи контролю (АСК) об'єкту чи пульту бортінженера. Видача блоком 14 команд може здійснюватись як для послідовної перевірки блоків 21 та 1, так і для почергової їх перевірки за сигналами запуску. Система працює наступним чином. При ввімкненні напруги живлення система встановлюється в початковий стан, після чого блоки 1, 21 та 26 починають функціонувати по завданому алгоритму. Сигнали з програмного блоку 14 не видаються за виключенням сигналів, що дозволяють проходження команд блоку 1 через блок 4 та команд блоку 21 через блок 20, та сигналу, який надходить на елемент 13 "НЄ". На виході елементу 13 "НЄ" з'являється сигнал, який забороняє функціонування блоку 3 через елементи "І" блока 9, елементів пам'яті блока 5 зв'язку з виконавчими елементами та лічильника 11. Блок 7 видає сигнали на блок 36 запуску блока 21 вимірювання обертів, які дозволяють запуск програмного блоку 14 при досягненні завданих рівнів обертів, в тому ж числі і межового значення, та забороняють - на блок 20 елементів "І". Блок 30 сигналів дозволу видає сигнали на блок 29 запуску, які дозволяють запуск програмного блоку 14 при з'явленні на виході блоку 1 сигналів, що свідчать про досягнення параметрами двигуна межових значень та сигнали на блок 4 "n''-входових елементів "І" які забороняють його роботу. При працюючому двигуні сигнали від датчиків надходять на блок 33 нормалізаторів блоку 1 сигналізаторів, де перетворюються в завданий рівень постійної напруги зручної як для аналогоцифрового перетворювання, так і для використання блоком 34 межових обмежень блоку 1 та блоку 8 контролю, функціонуючими за завданими алгоритмами. Обмежувачі блоку 34 блоку 1 налагоджуються на межові значення параметрів (як мінімальні так і максимальні) та видають команди як при досягненні аварійних режимів роботи газотурбінного двигуна, так і при досягненні завданих (неаварійних) режимів роботи для ввімкнення автоматики двигуна. В процесі функціонування системи робиться як послідовна перевірка технічного стану блоку 21, а потім блоку 1 по запрошенням АСК або бортінженера так і автоматична при досягненні параметрами газотурбінного двигуна межового (завданого) значення. Від датчика обертів (не показано) частотний сигнал, пропорційний частоті обертів двигуна, надходить до блоку 21, який обробляє його за завданим алгоритмом. При порушенні ланцюгу датчику обертів на виході блоку 18 з'являється сигнал, що забороняє видачу з блоку 21 сигналів заданих рівнів обертів та надходить через елемент 10 "ІЛІ" на вхід лічильника 11, де реєструється при роботі програмного блоку 14. При досягненні заданого рівня обертів, при відсутності порушення ланцюгу датчика, вимірювач 35 обертів блока 21 видає сигнал до блоку 36 (фіг. 2), який в зв'язку з наявністю на другому його вході дозволяючих сигналів з блоку 7 видає сигнал на запуск програмного блоку 14. Після отримання сигналу запуску з блоку 21 програмний блок 14 по ланцюгу 14-1 знімає сигнал з елемента 13 "НЄ", внаслідок чого на виході останнього з'являється сигнал, що дозволяє функціонування елементів пам'яті - тригерів блоку 5 в зв'язку з виконавчими елементами, а також блоку 9 елементів "І" та лічильника 11. Далі програмний блок 14 видає по ланцюгу 14-2 сигнал до блоку 5 та фіксує за допомогою тригерів стан виходів блоку 21 вимірювання обертів у випадку, якщо присутній дозволяючий сигнал з блоку 7 на вході блоку 20 елементів "І". Якщо сигнал про досягнення завданого рівня обертів видає блок 21 через блок 20 елементів "І" та надходить дозволяючий сигнал з блоку 7, то він фіксується блоком 5 на час проходження самоконтролю. Цим забезпечується безперервність видачі команд на виконавчі елементи на термін проведення самоконтролю блоку 21. Далі з завданим інтервалом часу "Т" після видачі сигналу на блок 5 програмний блок 14 видає по ланцюгу 14-3 сигнал на вимірювач 35 обертів блоку 21 (фіг. 2), який забороняє проходження сигналу датчика (не показаний) обертів та дозволяє проходження імпульсів задатчика 22 контрольної частоти по тракту вимірювача 35. Сигнал, який видається програмним блоком 14 на блок 21 по ланцюгу 14-3, знімає також сигнал заборони, що надходить з блоку 18 у випадку порушення ланцюгу датчика, на видачу команд з блоку 21 при самоконтролі. Одночасно з видачею сигналу по ланцюгу 14-3 до блоку 21 видається сигнал по ланцюгу 14-4 до входу блока 20 елементів "І", що забороняє видачу команд з блока 20 при проведенні самоконтролю. Контрольна частота з задатчика 22 забезпечує видачу сигналів усі х вимірюваних рівней обертів вимірювачем 35, та відповідно блоком 21. Якщо вимірювач 35 обертів справний, то на всіх його виходах видаються сигнали. При наявності несправностей в тракті вимірювача 35 обертів (фіг. 2) один або кілька сигналів на його виході відсутні. З інтервалом часу, визначеним швидкодією тракту вимірювання обертів, до входу блоку 19 по ланцюгу 14-5 видається сигнал. Якщо порушення в функціонуванні тракту вимірювання обертів нема, то в блоці 19 відмова не фіксується. Якщо хоча б один сигнал завданого рівня обертів на виході блоку 21 відсутній, в блоці 19 фіксується відмова. Сигнал відмови з блоку 19 надходить до блоку 20 елементів "І" та забороняє проходження через них сигналів з блоку 21 по закінченні самоконтролю. Якщо всі сигнали на виході блоку 21 присутні, в блоці 19 відмова не фіксується. З інтервалом часу "Т" з моменту закінчення сигналу до блоку 19 з блоку 14 на за датчик 22 контрольної частоти по ланцюгу 14-6 надходить сигнал що завдає режим його роботи, при якому з його виходу на вхід вимірювача 35 обертів блоку 21 надходить частотний сигнал, що забезпечує зняття з його виходу сигналів завданих рівнів обертів. Під дією сигналу з задатчика 22 вимірюючий тракт обробляє контрольний сигнал та усі команди з вимірювача 35 обертів блоку 21 знімаються, що свідчить про справність вимірювального тракту блоку 21. Якщо хоча б один з сигналів завданого рівня обертів на виході вимірювача 35 зостається, то це означає що вимірювальний тракт несправ 5 38854 ний. При наявності хоча б одного сигналу на виході блоку 21 та надходження з блоку 14 по ланцюгу 14-7 сигналу до блоку 19 в ньому фіксується відмова. Сигнал відмови з блоку 19 надходить до блоку 20 елементів "І" та забороняє проходження через них сигналів з блоку 21 по закінченні самоконтролю. У випадку відсутності несправностей в тракті вимірювання обертів та зняття всіх сигналів з виходу блоку 21, під дією сигналу по ланцюгу 147 в блоці 19 відмова не фіксується. Після цього знімаються сигнали, які надходили по ланцюгах 14-3 та 14-6 з виходу блоку 14 до блоку 21 та задатчик 22. При цьому припиняється надходження в вимірювальний тракт блоку 21 сигналу з задатчика 22 контрольної частоти, який переходить в початковий стан, а в вимірювальний тракт блоку 21 надходить сигнал з датчику обертів газотурбінного двигуна. Оскільки сигнал з датчику обертів є завданим рівнем обертів, то з ви ходу блоку 21 видаються сигнали, які надходять на входи власного блоку 36 запуску, блоку 7 сигналів дозволу, блоку 19 відмов обертів та блоку 20 елементів "І". З інтервалом часу "Т" після зняття сигналів з блоку 14 по ланцюгам 14-3 та 14-6 по ланцюгу 14-8 видається сигнал, під дією якого тригери блоку 7, на управляючих входах яких присутні сигнали досягнення завданих рівнів обертів, змінюють свій початковий стан. При цьому з виходу блоку 7 до відповідних входів блоку 36 запуску блока 21 надходять сигнали, забороняючи запуск блоку 14, а на відповідні елементи "І" блоку 20 надходять сигнали, які відповідають завданим рівням обертів, та дозволяючи проходження через них команд до блоку 5 і далі на виконавчі елементи і блок 32 контролю команд управління. Потім знімається забороняючий сигнал, який надходив по ланцюгу 14-4 блоку 14, та видається сигнал, що дозволяє проходження сигналів завданих рівнів обертів через блок 20 елементів "І" та далі через блок 5 на виконавчі елементи (не показані) і блок 32 контролю команд управління. Таким чином, блок 7 сигналів дозволу забезпечує видачу команд завданих рівнів обертів на виконавчі елементи і блок 32 контролю команд управління при досягненні двигуном завданих рівнів обертів тільки після проведення контролю функціонування блоку 21. Цим виключається помилкова видача сигналів на виконавчі елементи. Крім того, з вимірювача 35 обертів блоку 21 сигнал у вигляді прямокутних імпульсів, період слідування яких пропорційний кількості обертів газотурбінного двигуна, надходить на перетворювач 23 частота-код. При зміненні режиму роботи газотурбінного двигуна оберти досягають наступного більш вищого рівня, на виході вимірювача 35 обертів блоку 21 з'являється сигнал, який надходить до блоку 36 запуску та відбувається запуск програмного блоку 14. При цьому цикл проведення самоконтролю блоку 21, описаний вище, повторюється. Якщо при зміненні режиму роботи газотурбінного двигуна в сторону зменшення обертів вони стануть нижче завданого рівня, то сигнал на виході блоку 5 знімається. Зняття сигналу завданого рівня обертів з виходу блоку 5 приводить до появлення на виході відповідного формувача блоку 6 сигналу, який встановлює відповідний тригер бло ку 7 в початковий стан, при якому на відповідний елемент "І" блоку 20 надходить сигнал, забороняючий проходження через нього до блоку 5 і далі на виконавчий елемент і блок 32 контролю команд управління команд відповідного рівня обертів, а до блоку 36 - сигнал, дозволяючий запуск програмного блоку 14 при повторному досягненні раніш знятого сигналу завданого рівня обертів. Таким чином, на виконавчі елементи і блок 32 контролю команд управління сигнали о досягненні завданих рівнів обертів надходять тільки після проходження самоконтролю, відсутність відмов в тракті вимірювання рівнів обертів і тільки при повторному підтвердженні досягнення завданого рівня обертів. Після завершення перевірки технічного стану блоку 21 вимірювання обертів може початися перевірка технічного стану блоку 1 сигналізаторів. Після завершення перевірки технічного стану блоку 21 вимірювання обертів (у випадку послідовної перевірки) починається перевірка технічного стану блоку 1 сигналізаторів. Перевірка технічного стану блоку 1 сигналізаторів заключається в наступному. Програмний блок 14 по ланцюгу 14-9 видає сигнал на вхід блоку 5 та фіксує в ньому за допомогою тригерів стан виходів блоку 1 сигналізаторів, якщо є дозволяючий сигнал з блоку 30 сигналів дозволу на вході відповідного елементу "І" блоку 4. Якщо сигнал про досягнення відповідним параметром завданого значення видається блоком 34 блоку 1 через блок 4 елементів "І" та надходить дозволяючий сигнал з блоку 30 на вхід відповідного елементу "І" блоку 4, то він фіксується блоком 5 на час проходження самоконтролю. Одночасно з видачею по ланцюгу 14-9 сигналу до блоку 5 програмний блок 14 по ланцюгу 14-10 видає сигнал на блок 2 управління переналагодженням, який фіксує вихідний стан блоку 34 межових обмежень блоку 1 для забезпечення їх переналагодження на видачу або зняття сигналів з виходів блоку 1 та для управління роботою блоку 3 формування відмови через блок 9 елементів "І". Потім з програмного блоку 14 по ланцюгу 1411 видається сигнал до блоку 4 та забороняє проходження команд з блоку 1 сигналізаторів до блоку 5 зв'язку з виконавчими елементами. Наступна команда, яка надходить по ланцюгу 14-12 відповідно до блоків 15 та 16 змінення мінімального та максимального рівня налагодження, при наявності відповідних сигналів з блоку 2 управління переналагодженням перелагоджує блок 34 блоку 1 на видачу сигналів (якщо сигнали до цього часу не видавалися) або на їх зняття (якщо сигнали до цього часу видавалися). При цьому сигнали через блок 4 "n"-входових елементів "І" не проходять внаслідок наявності на його вході забороняючого сигналу з програмного блоку 14. Якщо переналагодження блоку 34 блоку 1 робиться відповідно до алгоритму самоконтролю, що визначається сигналами з виходу блоку 1, які надходять безпосередньо, та сигналами, які надходять з виходу блоку 2 управління переналагодженням через блок 9 елементів "І" до блоку 3 формування відмови, то відмова в блоці 3, при надходженні наступної команди по ланцюгу 14-13 з програмного блоку 14, не фіксується. Блок 9 6 38854 елементів "І" призначений для управління роботою блоку 3 з метою підвищення його завадостійкості. Якщо переналагодження одного з каналів блоку 34 межових обмежень блоку 1 внаслідок порушення ланцюгу його датчика відбувається не відповідно до алгоритму контролю, то внаслідок дії забороняючого сигналу з блоку 8 на вхід відповідного елементу "І" блоку 9 в блоці 3 також не фіксується відмова по даному каналу. Якщо хоча б один з каналів блоку 1 не видає сигнал, (внаслідок переналагодження він повинен був його видати), або не знімає сигнал, хоча він повинен був зняти його з виходу (при відсутності порушення ланцюгу датчика), то по мірі надходження сигналу з програмного блоку 14 в блоці 3 фіксується відмова. Сигнал відмови надходить на вхід елементу "І" блоку 4, відповідно до каналу, що відмовив. Цим виключається помилкова видача сигналів на виконавчі елементи після проходження самоконтролю. Крім того, сигнал відмови через елемент 10 "ІЛІ" надходить на вхід лічильника 11 та фіксується в ньому при надходженні сигналу по ланцюгу 14-14 з програмного блоку 14. При надходженні сигналу по ланцюгу 14-14 в лічильнику 11 фіксується також відмова блоку 21 вимірювання обертів та порушення ланцюгу датчика як сигналізаторів, так і обертів. Одночасно з видачею програмним блоком 14 сигналу на лічильник 11 він знімає по ланцюгу 14-12 команду переналагодження з блоків 15 та 16 змінений мінімального та максимального рівнів налагодження і канали блоку 34 блоку 1 переналагоджуються на задані (робочі) рівні обмеження. Так як сигнали з датчиків контрольованих параметрів будуть відповідати завданим рівням обмеження, то на ви ході блоку 1 сигналізаторів будуть видаватися сигнали, які надходять на входи блоку 29 запуску, блоку 30 сигналів дозволу та блоку 4 "n''-входови х елементів "І". З інтервалом часу після зняття сигналу по ланцюгу 14-12 з блоку 14 по ланцюгу 14-15 видається сигнал, під дією якого тригери блоку 30, на управляючих входах яких присутні сигнали досягнення параметрами межових значень, змінюють свій початковий стан. При цьому на відповідні входи блоку 29 запуску будуть надходити сигнали, які забороняють запуск блоку 14, а на відповідні елементи "І" блоку 4 будуть надходити сигнали, які відповідають завданим рівням обмеження параметрів, дозволяючи проходження, через них, до блоку 5 та далі на виконавчі елементи і блок 32 контролю команд управління. Після цього знімається забороняючий сигнал, який надходив по ланцюгу 14-11 блоку 14, та видається сигнал, дозволяючий проходження сигналів завданих рівнів обмеження параметрів через блок 4 "n"-входових елементів "І" та далі через блок 5 на виконавчі елементи і блок 32 контролю команд управління. З вищевикладеного бачимо, що блок 30 сигналів дозволу забезпечує видачу команд, завданих рівнів обмеження параметрів, на виконавчі елементи при досягненні заданих рівнів обмеження тільки після проведення контролю функціонування блоку 1 сигналізаторів. Цим виключається помилкова видача сигналів на виконавчі елементи. Якщо при зміненні режиму роботи газотурбінного двигуна значення параметру стало нижче рівня обмеження, то сигнал на вході блоку 5 знімається. Зняття сигналу завданого рівня обмеження з виходу блоку 5 призводить до появлення на виході відповідного формувача блоку 6 сигналу, який установлює відповідний тригер в блоці 30 сигналів дозволу в початковий стан, при якому на відповідний елемент "І" блока 4 буде надходити сигнал, забороняючий проходження на виконавчий елемент команд відповідних рівнів обмеження параметрів, а до блоку 29 - сигнал, дозволяючий запуск програмного блоку 14 при повторному досягненні раніш знятого сигналу завданого рівня обмеження параметру. Таким чином, на виконавчі елементи сигнали про досягнення межових рівнів обмеження параметрів потрапляють тільки після проходження самоконтролю, відсутність відмов в тракті блоку 1 сигналізаторів і тільки при повторному підтвердженні досягнення параметром свого межового значення. Останнім знімається сигнал, який надходить з програмного блоку 14 на вхід елементу 13 "НЄ" по ланцюгу 14-1 і програмний блок 14 установлюється в початковий стан. При порушенні ланцюга датчика одного з каналів блоку 34 блоку 1 або відмови одного з нормалізаторів блоку 33 блоку 1, який призводе до зникнення сигналу на його виході, що рівнозначно аварійному стану газотурбінного двигуна, наприклад, за мінімальним тиском масла в маслосистемі двигуна, або до збільшення сигналу на вході відповідного каналу блоку 34 блоку 1, що рівнозначно також аварійному стану двигуна, наприклад, за максимальною температурою масла в маслосистемі двигуна, на ви ході блоку 8 з'явиться сигнал, який, впливаючи на відповідний канал блоку 34, в ланцюгу датчика якого або нормалізатора блоку 33 виникло порушення, забороняє видачу їм команди на виконавчий елемент. Сигнал про порушення ланцюгу датчика при відмові нормалізатора блоку 33 блоку 1 з виходу блоку 8 потрапляє також на відповідний елемент "І" блоку 9 і, таким чином, забороняє формування сигналу відмови по чинному каналу в блоці 3 при проходженні самоконтролю, так як порушується режим роботи сигналізатора при відмовах в ланцюгу да тчику. Відмова відповідного нормалізатора блоку 33 блоку 1 буде виявлена за наслідками дешифр ування польотних даних зареєстрованих в блоці 28 пам'яті після кожного польоту літального апарату. Крім того, сигнал про порушення ланцюга датчика або відмови нормалізатора блоку 33 блоку 1 через елемент 10 "ІЛІ" надходить на вхід лічильника 11 та фіксується в ньому при проходженні самоконтролю. Якщо короткочасне порушення ланцюга датчика виникло в період відсутності самоконтролю, на час більше ніж постійна часу нормалізаторів блоку 33 блоку 1, то буде тільки заборонена видача помилкової команди з виходу відповідного каналу блоку 34 блоку 1. Якщо видача команди виникає внаслідок відмови одного з каналів блоку 34 блоку 1, то при проведенні самоконтролю фіксується відмова відповідного каналу, а команда в цьому випадку на виконавчий елемент не видається. Якщо при проходженні кількох циклів конт 7 38854 ролю, наприклад трьох на виході блоку 3 зберігається сигнал відмови хоча б одного каналу блоку 34 блоку 1, при порушенні хоча б одного з контрольованих ланцюгів датчиків або відмови хоча б одного з каналів блоку 33 блоку 1, а також при з'явленні сигналу відмови на виході блоку 19 на виході лічильника 11 видається сигнал стійкої відмови або порушення ланцюга датчика. При наявності сигналу з виходу лічильника 11 та елементу 10 "ІЛІ" на виході елементу 12 "І" з'являється сигнал, який надходить в бортову систему реєстрації. При короткочасному випадковому порушенні ланцюга датчика в час дії вібраційних навантажень або отриманні сигналу відмови сигналізатора блоку 34 блоку 1, або блоку 21 вимірювання обертів від випадкового збою при функціонуванні або проведенні самоконтролю наступний цикл контролю не дає підтвердження вказаних відмов, внаслідок чого лічильник 11 обнулюється, тобто повертається до початкового стану. Автоматичний режим контролю функціонування тракту блоку 1 по сигналу запуску з блоку 29 визначається в наступному. При досягненні одним з параметрів свого межового значення блок 1 видає сигнал на блок 29 запуску, який в зв'язку з наявністю на другому його вході дозволяючих сигналів з блоку 30 сигналів дозволу, видає сигнал на запуск програмного блоку 14. Після отримання сигналу з блоку 29 програмний блок 14 по ланцюгу 14-1 знімає сигнал з елемента 13 "НЄ", внаслідок чого на його виході з'являється сигнал, що дозволяє функціонування елементів пам'яті блоку 5 зв'язку з виконавчими елементами, блоку 9 елементів "І" та лічильника 11. Далі програмний блок 14 видає по ланцюгу 149 сигнал на блок 5 та фіксує за допомогою тригерів стан виходів блоку 1, якщо є дозволяючий сигнал на вході блоку 4 "n''-входових елементів "І", який надходить з блоку 30 сигналів дозволу. Якщо сигнал, який свідчить про досягнення параметром свого межового значення, видається блоком 1 через блок 4 елементів "І", за наявністю на його вході дозволяючого сигналу з блоку 30, то він фіксується блоком 5 на період проведення самоконтролю. Цим забезпечується безперервність видачі команд на виконавчі елементи на період проведення самоконтролю блока 1. Одночасно з видачею по ланцюгу 14-9 сигналу на блок 5 програмний блок 14 по ланцюгу 14-10 видає сигнал на блок 2 управління переналагодженням і цикл контролю функціонування блоку 1 виконується за вищезазначеним алгоритмом. Реєстрація поточних значень параметрів газотурбінного двигуна від його запуску до зупинення, а також стан ланцюгів датчиків виконується в наступному порядку. Операційний блок 26 видає сигнали, наприклад, у вигляді двійкового коду, на комутатор 24 для почергового підключення сигналів з виходу блоку 33 нормалізаторів блоку 1, значення яких характеризують стан газотурбінного двигуна. У наслідок чого сигнал з виходу блоку 33 блоку 1 через комутатор 24 надходить на аналогоцифровий перетворювач 25, де перетворюється в двійковий код. З інтервалом часу, визначеним швидкодією перетворювача 25, після видачі на його вхід сигналу з ви ходу комутатора 24, операційний блок 26 видає сигнал на вхід аналого цифрового перетворювача 25. Внаслідок, наприклад, послідовний двійковий код з виходу аналогоцифрового перетворювача 25 надходить на вхід блоку 26 та реєструється в його пам'яті. По закінченню перетворювання всіх аналогових сигналів з виходу блоку 33 блоку 1 та запису результатів перетворювання в пам'ять блоку 26, останній припиняє видачу сигналів на комутатор 24. Після чого операційний блок 26 видає сигнал на перетворювач 23 частота-код і наслідок перетворювання частотного сигналу, який надходить з виходу блоку 21, наприклад, в вигляді послідовного двійкового коду надходить на вхід операційного блоку 26, де і фіксується в його пам'яті. Перетворювач 23 частота-код перетворює частотний сигнал, який надходить з виходу вимірювача 35 обертів блоку 21, в двійковий код великість якого пропорційна обертам газотурбінного двигуна. Після закінчення запису коду, який характеризує рівень обертів двигуна з перетворювача 23, операційний блок 26 видає сигнал на шинний формувач 27 для підключення виходів блоку 8 та блоку 18 до свого входу з послідуючою реєстрацією сигналів з блоків 8 та 18 в пам'яті. Після завершення запису сигналів з блоку 8 та блоку 18 операційний блок 26 знімає сигнал з шинного формувача 27 і виходи блоку 8 та блоку 18 відключаються від входу блока 26 чим і завершується цикл запису значень реєстрованих параметрів в пам'яті операційного блоку 26. Операційним блоком 26, з записаної в його пам'яті інформації, формується кадр, який їм же переписується в відповідні адреси блоку 28 пам'яті. Цим і завершується цикл запису параметрів газотурбінного двигуна та стан ланцюгів датчиків в пам'ять блоку 28, після чого операційний блок 26 видає сигнали на комутатор 24 та цикл реєстрації сигналів, які характеризують стан газотурбінного двигуна, повторюється відповідно описаному вище алгоритму. Реєстрація вихідних команд управління системи виконується у наступному порядку. При працюючому двигуні ви хідні команди, наприклад, у вигляді бортової напруги, величина якої може бути, наприклад, плюс 27 вольт, з блока 5 надходять на виконавчі елементи і водночас надходять на вхід блока 40 гальванічної розв'язки блока 32 контролю команд управління. Блок 40 блока 32 призначений для гальванічної розв'язки бортмережі літального апарата і напруги живлення блоків і елементів системи управління і контролю параметрів газотурбінного двигуна для забезпечення її завадостійкості. При надходженні на входи блока 40 блока 32 напруги бортмережі на відповідних його виходах одержимо сигнали, наприклад, у вигляді логічної "1", які надходять на входи паралельно-послідовного регістру 39 блока 32 і реєструються у ньому по сигналу з операційного блока 26. Потім з виходу операційного блока 26 на тактовий вхід регістру 39 блока 32 надходять тактові імпульси під впливом яких, зареєстровані у регістрі 39 блока 32 сигнали, з виходу блока 40 блока 32, наприклад, у вигляді однополярного послідовного двійкового коду надходять на вхід блока 26 і фіксуються у його пам'яті. Операційним блоком 26, з записаної до його пам'яті інформації, що характеризує стан вихідних команд системи, формується кадр, який ним же переписується у відповідні адреси блока 28 пам'яті. Цим і завершу 8 38854 ється цикл запису вихідних команд системи, що надходять на виконавчі елементи газотурбінного двигуна і літального апарата, у пам'ять блока 28. Після завершення польотів літального апарату або наземних гонок двигунів до системи підключається зчитувальне приладдя, яке на вхід операційного блоку 26 по ланцюгу зв'язку видає інформацію, наприклад, в вигляді двійкового коду, під впливом якого блок 26 переходе до режиму зчитування накопиченої інформації блоком 28 пам'яті. В цьому режиму операційний блок 26 видає в блок 28 послідовні адресні кодові значення для забезпечення послідовного зчитування двійкового коду (накопиченої інформації), через операційний блок 26. Зчитана інформація прямує до центру дешифрування нельотних даних, де аналізується стан вихідних команд системи, стан газотурбінного двигуна в тому ж рахунку і ланцюгів датчиків, та визначається або необхідність проведення різноманітних профілактичних (ремонтних) заходів або послідуюча його експлуатація. При непрацюючому двигуні, наприклад, на етапі виробництва літального апарата чи після його капітального ремонту, а також при проведенні регламентних робіт, пошуку відмов у ланцюгах виконавчих елементів чи перевірці функціонування самих виконавчих елементів до системи підключається наземна апаратура, яка на вхід операційного блока 26 по лінії зв'язку видає інформацію, наприклад, у вигляді послідовного однополярного двійкового коду, під впливом якого блок 26 переходить у режим контролю стану ви хідних ланцюгів системи. При непрацюючому газотурбінному двигуні команди у вигляді напруги плюс 27 вольт на виході блока 5 повинні бути відсутні. Видача команд блоком 5 свідчить про його несправності. Для визначення справності системи підключена до блока 26 наземна апаратура видає кодові посилки і блок 26 переходить у режим контролю наявності вихідних команд з блока 5. Далі система працює за описаним вище алгоритмом контролю команд управління при працюючому двигуні. Після завершення циклу контролю вихідних команд блок 26, наприклад, видає сигнал у наземну апаратуру, яка в свою чергу, видає кодову посилку у блок 26 для зчитування зафіксованої інформації і подальшого визначення наявності видачі помилкових команд системою. У випадку видачі блоком 5 помилкових команд система бракується і замість установлюється справна система. Для перевірки видачі команд блоком 5 системи, при непрацюючих двигуна х, а також для перевірки працездатності виконавчих елементів (різних агрегатів літального апарата і газотурбінного двигуна) і ліній зв'язку з ними, наприклад, при виконанні регламентних робіт чи перевірці бортових ланцюгів і працездатності агрегатів при виробництві літального апарата чи після капітального ремонту наземна апаратура видає кодові посилки у блок 26, який переходить у режим роботи з блоком 31 управління видачею команд. При цьому режимі з виходу блока 26 на вхід послідовнопаралельного регістру 37 блока 31 надходить послідовний однополярний двійковий код, який у регістрі 37 блока 31 перетворюється у паралельний двійковий код. У наслідку перетворення на виходах регістра з'являються сигнали, наприклад, у вигляді логічної "1", які надходять на входи блока 38 блока 31. Причому кількість каналів в блоці 38 блока 31 відповідають кількості виходів блока 5 системи. При непрацюючому двигуні на останній вхід послідовно-паралельного регістру 37 блока 31 з виходу вимірювача 35 обертів блоку 21 надходить сигнал, наприклад, у вигляді логічної "1", що дозволяє проходження сигналів з виходу регістра 37 блока 31 на вхід блока 38 ключів блока 31 виходи якого зв'язані з входами блока 5 зв'язку з виконавчими елементами. При надходженні сигналу, наприклад, у вигляді логічної "1" на відповідний вхід блока 38 блока 31, відповідний ключ блока 38 блока 31 відкривається і впливаючи на відповідний вихідний елемент блока 5, наприклад, на реле, у наслідку чого реле спрацьовує, замикає свої контакти і на виході блока 5, а відповідно і на виході системи з'являється команда, наприклад, у вигляді напруги плюс 27 вольт. Наявність команди на виході системи свідчить про справності системи, а відсутність команди свідчить про відмову системи. Вихідна команда блока 5 при справності ланцюгів і самих виконавчих елементів включає відповідний агрегат літального апарата чи газотурбінного двигуна. Спрацьовування виконавчого елемента свідчить про справності його самого і лінії зв'язку з ним. У випадку не спрацьовування виконавчого елемента з'ясовується причина відмови, яка полягає у перевірці наявності вихідної команди блока 5 системи (перевіряється за описаним вище алгоритмом контролю видачі команд при працюючому двигуні), лінії зв'язку і функціонування самого виконавчого елемента. Виявлені несправності усуваються. Для визначення наявності вихідної команди, а відповідно і справності системи підключена до блока 26 наземна апаратура видає кодові посилки і блок 26 переходить у режим контролю наявності вихідних команд з блока 5. Далі система працює за описаним вище алгоритмом контролю команд управління при працюючому двигуні. Цим і закінчується перевірка системи, виконавчих елементів і ліній зв'язку з ними. Для запобігання видачі помилкових команд управління блоком 31, при працюючому двигуні, на його вхід з вимірювача 35 обертів блока 21 надходить сигнал, наприклад, у вигляді логічної "1" який блокує роботу блока 21. Цим і запобігається несанкціонований вплив блока 31 на роботу блока 5 при працюючому двигуні. Винахід дозволяє виключити аварійні ситуації на борту літального апарату за рахунок виключення видачі помилкових команд за допомогою проведення самоконтролю блоку сигналізаторів перед видачею команд на виконавчі елементи та підвищити таким чином безпеку польотів. Технічне рішення за винаходом також за рахунок забезпечення реєстрації параметрів, які характеризують стан газотурбінного двигуна, стан ланцюгів датчиків та стан вихідних команд блоку 5 системи, дозволить забезпечити надійну експлуатацію газотурбінного двигуна за технічним станом, скоротити час на усунення відмов в обладнанні двигуна, літального апарату, та ланцюгів датчиків і як наслідок підвищити надійність та знизити вартість експлуатації газотурбінного двигуна, а також скоротити бездію авіаційної техніки. 9 38854 Крім того, проведення контролю видачі помилкових команд з виходу системи і видачі команд системою для перевірки функціонування виконавчих елементів і їх ліній зв'язку при непрацюючому двигуні дозволить визначити який конкретно виконавчий елемент у відмові, або визначити відмову у відповідному ланцюгу виконавчого елемента газотурбінного двигуна або літального апарату, і як наслідок скоротити час пошуку відмов виконавчих елементів і їх ланцюгів, а також скоротити бездію авіаційної техніки. 10 Фіг. 1 38854 11 38854 Фіг. 2 Фіг. 3 12 38854 Фіг. 4 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 13
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for gas-turbine engine parameters control and check
Автори англійськоюBezschastnyi Vasyl Oleksiiovych
Назва патенту російськоюСистема управления и контроля параметров газотурбинного двигателя
Автори російськоюБессчастный Василий Алексеевич
МПК / Мітки
МПК: F02C 9/28
Мітки: параметрів, двигуна, система, газотурбінного, управління, контролю
Код посилання
<a href="https://ua.patents.su/13-38854-sistema-upravlinnya-ta-kontrolyu-parametriv-gazoturbinnogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Система управління та контролю параметрів газотурбінного двигуна</a>
Система автоматичного управління та контролю параметрів газотурбінного двигуна
Номер патенту: 40478
Опубліковано: 17.03.2003
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: система, двигуна, автоматичного, управління, контролю, параметрів, газотурбінного
Формула / Реферат:
Система автоматичного управління та контролю параметрів газотурбінного двигуна, яка має комутатор, з'єднаний через аналого-цифровий перетворювач з першим операційним блоком, вхід блока узгодження з'єднаний з першим аналоговим входом системи, а вихід - з другим комутатором та блоком контролю вхідних ланцюгів, вихід якого з'єднаний з першим операційним блоком та другим входом другого комутатора, останній вхід якого з'єднаний з першим блоком...
Система керування та контролю параметрів газотурбінного двигуна
Номер патенту: 22952
Опубліковано: 15.11.2001
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: контролю, параметрів, двигуна, газотурбінного, керування, система
Формула / Реферат:
Система керування та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, який з'єднано з блоком керування переладнанням блоком формування відмови, блоком n –входових елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднано з блоком сигналів дозволу, вихід блока контролю з'єднано з блоком сигналізаторів, першим блоком елементів "І" та елементом...
Система управління та контролю параметрів газотурбинного двигуна
Номер патенту: 22952
Опубліковано: 05.05.1998
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: система, газотурбінного, двигуна, контролю, управління, параметрів
Формула / Реферат:
Система керування та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, який з'єднано з блоком керування переладнанням блоком формування відмови, блоком n –входових елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднано з блоком сигналів дозволу, вихід блока контролю з'єднано з блоком сигналізаторів, першим блоком елементів "І" та елементом...
Система контролю параметрів газотурбінного двигуна
Номер патенту: 33516
Опубліковано: 17.12.2001
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28, G06F 11/273
Мітки: параметрів, газотурбінного, двигуна, контролю, система
Формула / Реферат:
Система контролю параметрів газотурбінного двигуна, яка містить послідовно з'єднані блок нормалізаторів, комутатор, аналого-цифровий перетворювач та операційний блок, яка відрізняється тим, що додатково введені блок контролю вхідних ланцюгів, блок еталонів, другий комутатор та блок узгодження, вхід якого з'єднано з входом системи, а вихід - через другий комутатор з'єднано із входом блока нормалізаторів, окрім того, вихід блока узгодження...
Система автоматичного контролю параметрів газотурбінного двигуна
Номер патенту: 39279
Опубліковано: 15.07.2003
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: газотурбінного, контролю, параметрів, двигуна, автоматичного, система
Формула / Реферат:
Система автоматичного контролю параметрів газотурбінного двигуна, яка містить блок формувачів, обчислювач, з'єднаний з виходом кожного з двох операційних блоків, та послідовно з'єднані блок нормалізаторів, комутатор та аналого-цифровий перетворювач, другий вхід комутатора з'єднаний з другим виходом першого операційного блока, яка відрізняється тим, що додатково введені блок контролю вхідних ланцюгів, блок еталонів, другий комутатор, блок...
Попередній патент: Засіб для ванн
Наступний патент: Спосіб одержання фіточаю “ромашковий” для лікування і профілактики захворювань органів травлення
Випадковий патент: Опора корпусу насоса, насосний вузол (варіанти) і спосіб установлення корпусу насоса (варіанти)