Абонентський пристрій, базова станція і спосіб передачі у системі радіозв’язку
Формула / Реферат
1. Абонентський пристрій або інший передавач, призначений для використання у системі радіозв'язку, який має у складі:
- кілька джерел інформаційних даних,
- кодуючий пристрій для кодування інформаційних даних,
- кілька джерел керуючих даних і
- модулятор для модулювання кодованих інформаційних даних різними відповідними модуляційними кодами для передачі сигналом несучої частоти, для об'єднування керуючих даних від різних джерел, і надання кодованих інформаційних даних і об'єднаних керуючих даних для передачі.
2. Абонентський пристрій за п. 1, який відрізняється тим, що керуючі дані включають дані керування потужністю і пілотні дані.
3. Абонентський пристрій за п. 2, який відрізняється тим, що модулятор здатний обробляти об'єднані дані керування потужністю і пілотні дані.
4. Абонентський пристрій за п. 3, який відрізняється тим, що модулятор здатний обробляти об'єднані керуючі дані для безперервної передачі.
5. Абонентський пристрій за п. 4, який відрізняється тим, що модулятор здатний об'єднувати інформаційні дані для передачі, яка може бути не безперервною.
6. Абонентський пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що модуляційні коди є кодами Уолша.
7. Абонентський пристрій за п. 6, який відрізняється тим, що код Уолша, яким модулюються інформаційні дані від першого з джерел інформації, є довшим за код Уолша, яким модулюються інформаційні дані від другого з джерел інформації.
8. Абонентський пристрій за п. 7, який відрізняється тим, що код Уолша, яким модулюються інформаційні дані від першого з джерел інформації, містить чотири кодових елементи, а код Уолша, яким модулюються інформаційні дані від другого з джерел інформації, містить два кодових елементи.
9. Абонентський пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що додатково має об'єднувач для об'єднування даних, що надходять від модулятора, одних з одними і з розширюючим кодом для передачі сигналом несучої частоти.
10. Абонентський пристрій за п. 9, який відрізняється тим, що додатково має передавальну схему, призначену для передачі сигналом несучої частоти розширених об'єднаних модульованих даних.
11. Абонентський пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що кодуючий пристрій здатний виконувати корекцію помилок з низькою частотою появи у коді.
12. Базова станція або інший приймач, призначений для використання у системі радіозв'язку, яка має у складі:
- приймальний пристрій для прийому сигналу несучої частоти і виділення з нього кодованих інформаційних даних від різних джерел інформації, модульованих різними відповідними модуляційними кодами, і виділення кодованих керуючих даних від різних джерел керування, об'єднаних одних з одними,
- демодулятор для демодуляції інформаційних даних і керуючих даних, кодованих різними відповідними кодами, і
- декодер для декодування кодованих інформаційних даних і демодуляції керуючих даних.
13. Спосіб передачі у системі радіозв'язку, який містить:
- отримання різних інформаційних даних,
- кодування інформаційних даних,
- отримання різних керуючих даних,
- модуляцію кодованих інформаційних даних різними відповідними модуляційними кодами для передачі сигналом несучої частоти,
- об'єднування керуючих даних від різних джерел і
- надання кодованих інформаційних даних і об'єднаних керуючих даних для передачі.
14. Спосіб генерування модульованих даних для передачі від першого абонентського пристрою з групи абонентських пристроїв, у якій зазначений перший абонентський пристрій передає керуючі дані і пілотні дані до базової станції, що підтримує зв'язок з цією групою абонентських пристроїв, який містить
- об'єднання зазначених керуючих даних і пілотних даних і
- модуляцію зазначених об'єднаних керуючих даних і пілотних даних згідно з єдиним канальним модуляційним форматом.
Текст
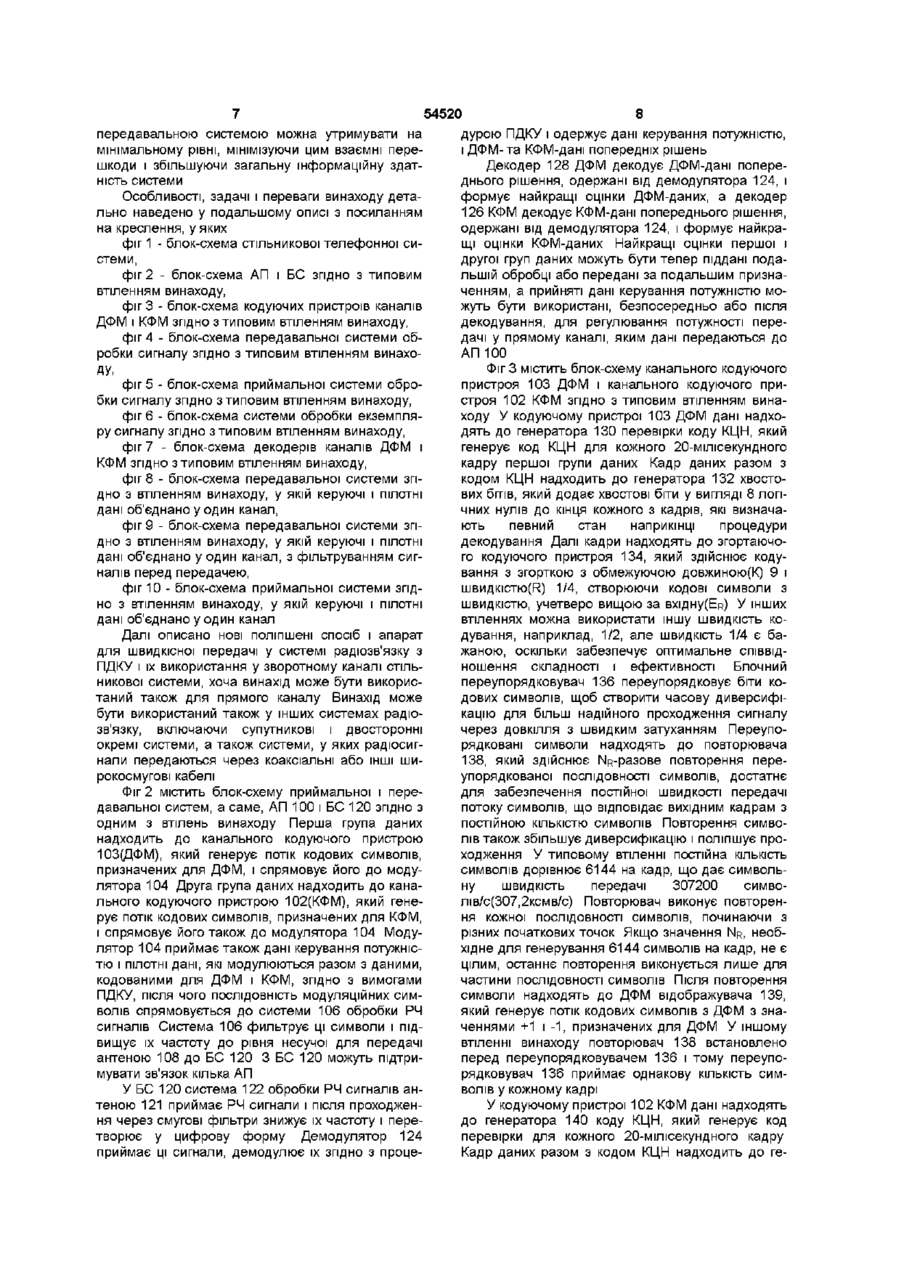
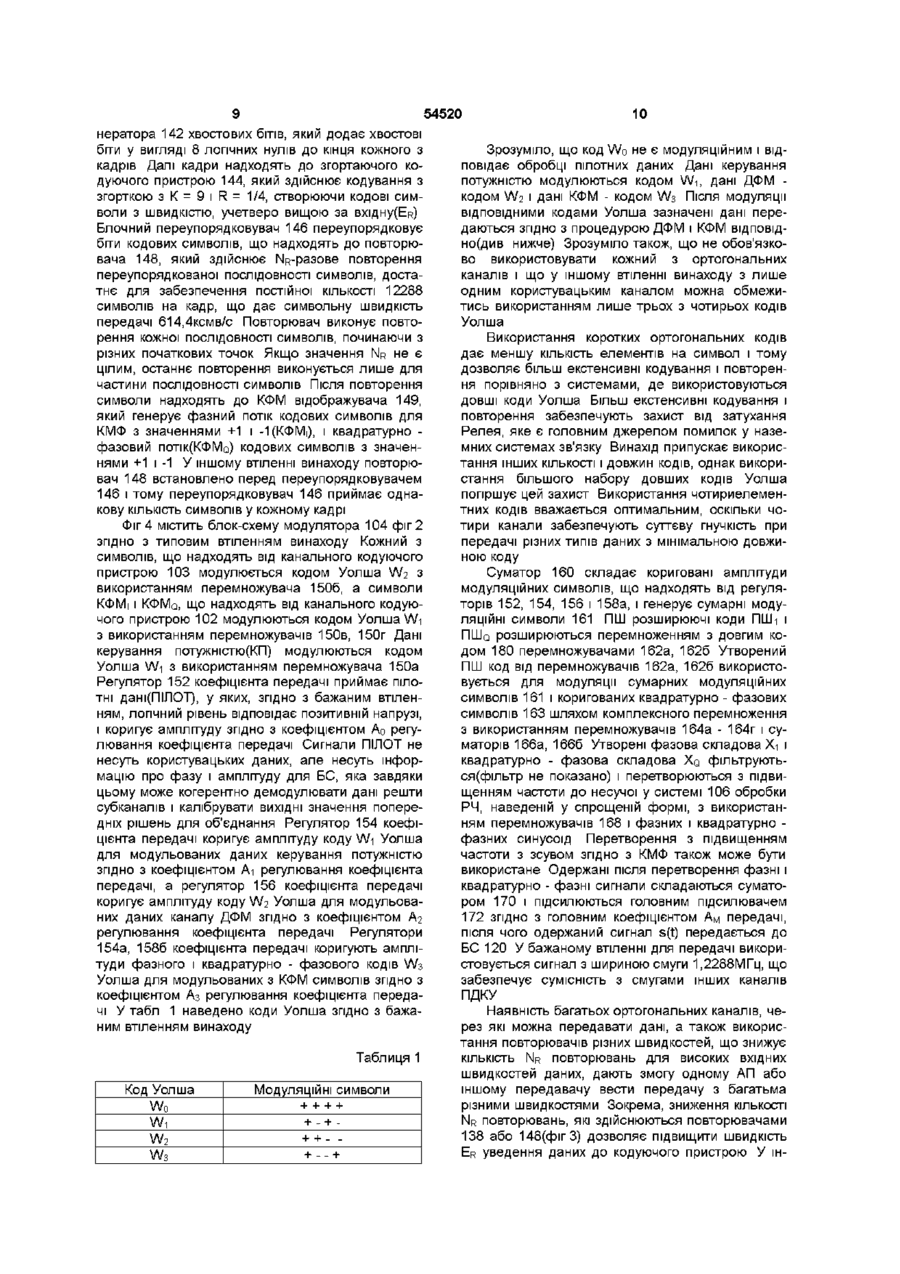
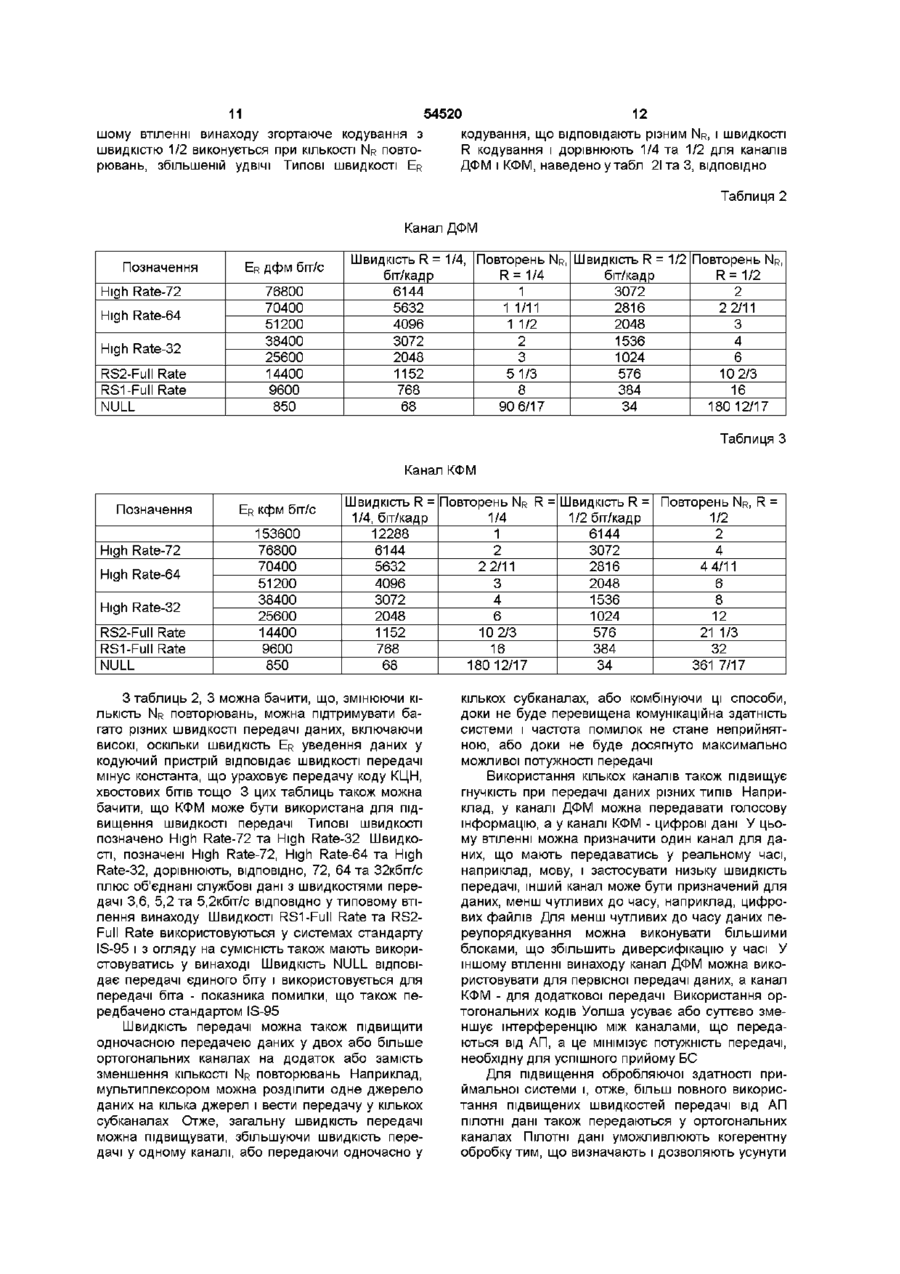
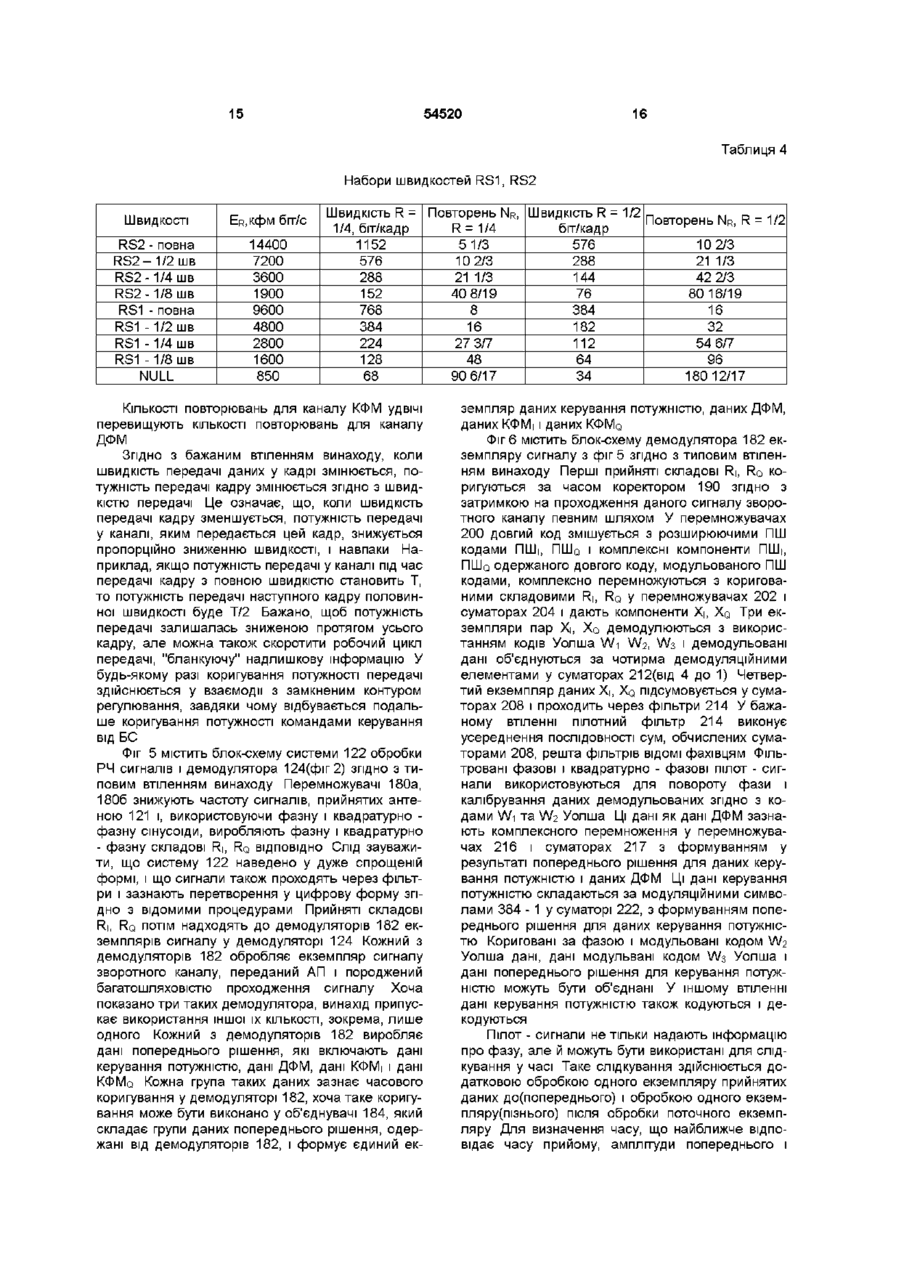
1 Абонентський пристрій або інший передавач, призначений для використання у системі радіозв'язку, який має у складі кілька джерел інформаційних даних, кодуючий пристрій для кодування інформаційних даних, кілька джерел керуючих даних і модулятор для модулювання кодованих інформаційних даних різними ВІДПОВІДНИМИ модуляційними кодами для передачі сигналом несучої частоти, для об'єднування керуючих даних від різних джерел, і надання кодованих інформаційних даних і об'єднаних керуючих даних для передачі 2 Абонентський пристрій за п 1 , який відрізняється тим, що керуючі дані включають дані керування потужністю і ПІЛОТНІ дані 3 Абонентський пристрій за п 2, який відрізняється тим, що модулятор здатний обробляти об'єднані дані керування потужністю і ПІЛОТНІ дані 4 Абонентський пристрій за п 3, який відрізняється тим, що модулятор здатний обробляти об'єднані керуючі дані для безперервної передачі 5 Абонентський пристрій за п 4, який відрізняється тим, що модулятор здатний об'єднувати інформаційні дані для передачі, яка може бути не безперервною 6 Абонентський пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що модуляційні коди є кодами Уолша 7 Абонентський пристрій за п 6, який відрізняється тим, що код Уолша, яким модулюються інформаційні дані від першого з джерел інформації, є довшим за код Уолша, яким модулюються інформаційні дані від другого з джерел інформації 8 Абонентський пристрій за п 7, який відрізняється тим, що код Уолша, яким модулюються ін формаційні дані від першого з джерел інформації, містить чотири кодових елементи, а код Уолша, яким модулюються інформаційні дані від другого з джерел інформації, містить два кодових елементи 9 Абонентський пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що додатково має об'єднувач для об'єднування даних, що надходять від модулятора, одних з одними і з розширюючим кодом для передачі сигналом несучої частоти 10 Абонентський пристрій за п 9, який відрізняється тим, що додатково має передавальну схему, призначену для передачі сигналом несучої частоти розширених об'єднаних модульованих даних 11 Абонентський пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що кодуючий пристрій здатний виконувати корекцію помилок з низькою частотою появи у коді 12 Базова станція або інший приймач, призначений для використання у системі радіозв'язку, яка має у складі приймальний пристрій для прийому сигналу несучої частоти і виділення з нього кодованих інформаційних даних від різних джерел інформації, модульованих різними ВІДПОВІДНИМИ модуляційними кодами, і виділення кодованих керуючих даних від різних джерел керування, об'єднаних одних з одними, демодулятор для демодуляції інформаційних даних і керуючих даних, кодованих різними ВІДПОВІДНИМИ кодами, і декодер для декодування кодованих інформаційних даних і демодуляції керуючих даних 13 Спосіб передачі у системі радіозв'язку, який містить отримання різних інформаційних даних, кодування інформаційних даних, отримання різних керуючих даних, модуляцію кодованих інформаційних даних різними ВІДПОВІДНИМИ модуляційними кодами для передачі сигналом несучої частоти, об'єднування керуючих даних від різних джерел і надання кодованих інформаційних даних і об'єднаних керуючих даних для передачі 14 Спосіб генерування модульованих даних для передачі від першого абонентського пристрою з О о ю ю 54520 групи абонентських пристроїв, у якій зазначений перший абонентський пристрій передає керуючі дані і ПІЛОТНІ дані до базової станції, що підтримує зв'язок з цією групою абонентських пристроїв, який МІСТИТЬ Винахід стосується абонентського пристрою і способу передачі у системі радіозв'язку У системах радіозв'язку, включаючи СТІЛЬНИКОВІ, супутникові і двосторонні одиночні системи, для передачі даних між двома системами використовується радіоканал, який утворюють модульовані РЧ(радючастотні) сигнали Використання безпровідного радіоканалу є бажаним з багатьох причин, включаючи підвищену мобільність, спрощені вимоги до інфраструктури порівняно з провідними ЛІНІЯМИ зв'язку Одним з ускладнень, пов'язаних з використанням радіоканалів є КІЛЬКІСНО обмежена комунікаційна здатність, зумовлена обмеженою КІЛЬКІСТЮ наявних смуг РЧ На відміну від цього у провідних системах зв'язку комунікаційну здатність можна підвищувати доданням провідних ЛІНІЙ Обмеженість РЧ смуг породила різні способи обробки сигналів, які підвищують ефективність використання наявних РЧ смуг у системах радіозв'язку Одним з поширених прикладів таких способів є обробка радіосигналів згідно з стандартом IS-95 і його похідними, наприклад, IS-95 і ANSI JSTD-008(flani - просто IS-95), розробленими Асоціацією Радюзв'язку(ТІА) і призначеними, перш за все, для стільникових систем Стандарт IS-95 передбачає модуляцію сигналів, яка забезпечує паралельний доступ з кодовим ущільненням каналів(ПДКУ) у одній смузі частот За умови ефективного керування потужністю, проведення багатьох сеансів зв'язку у одній смузі частот збільшує загальну КІЛЬКІСТЬ ВИКЛИКІВ І ІНШИХ сеансів зв'язку, які можуть бути обслуговані системою радіозв'язку завдяки збільшенню повторного використання частот порівняно з іншими процедурами Використання ПДКУ описано у патентах США 4 901 307 та 5 103 459, включених сюди посиланням Фіг 1 спрощено ілюструє стільникову телефонну систему, побудовану згідно з стандартом IS-95 Абонементні пристроі(далі - АП) 10а-г проводять сеанси зв'язку, встановлюючи один або більше радюзв'язків на РЧ з однією або більше базовими станціями(далі - БС) 12а-г, використовуючи сигнали РЧ, модульовані згідно з вимогами ПДКУ Кожний радіозв'язок між БС 12 і АП 10 включає сигнали прямого каналу, що передаються від БС 12, і сигнали зворотного каналу, які передаються від АП Зв'язок з іншим абонентом здійснюється через комутаторний центр мобілей(КЦМ) 14 і комунальну комутаторну телефонну мережу(ККТМ) 16 Зв'язок між БС 12, КЦМ 14 і ККТМ 16 звичайно здійснюється через провідні лінії, хоча ІНОДІ використовуються додаткові РЧ або мікрово 4 об'єднання зазначених керуючих даних і пілотних даних і модуляцію зазначених об'єднаних керуючих даних і пілотних даних згідно з єдиним канальним модуляційним форматом лнові канали Згідно З IS-95 кожний АП 10 передає користувацькі дані одноканальним некогерентним сигналом у зворотному каналі з максимальною бітовою швидкістю 9,6 або 14,4кбіт/с залежно від обраного набору швидкостей передачі Некогерентний канал - це канал, у якому приймальна система не використовує фази сигналу під час обробки, використання ж когерентного каналу дає змогу використовувати фазу несучої Інформація про фазу звичайно передається пілот-сигналом, але може бути отримана з переданого сигналу IS-95 передбачає застосування у прямому каналі набору 64 кодів Уолша з 64 елементів кожний Одноканальний некогерентний сигнал з максимальною бітовою швидкістю 9,6 або 14,4кбіт/с у зворотному каналі, передбачений IS-95, зручно використовувати у стільникових телефонних системах, де під час сеансу зв'язку передається голосова інформація у цифровій формі або низькошвид КІСНІ цифрові дані, наприклад, факсові Зворотний канал обрано некогерентним, оскільки у системі, у якій кожна з БС 12 у кожній смузі 1,2288МГц може мати зв'язок з 80АП, необхідні пілот-сигнали від кожного АП суттєво збільшать рівень взаємних перешкод між АП Крім того, при бітових швидкостях 9,6 або 14,4кбіт/с відношення потужностей передачі пілот-сигналів і користувацьких даних може стати значним і також підвищити рівень перешкод Використання одноканального сигналу у зворотному каналі зумовлено тим, що телефонний радіозв'язок вимагає використання лише одного типу зв'язку під час сеансу зв'язку Крім того, обробка одноканальних сигналів є простішою, ніж багатоканальних З розвитком цифрових систем зв'язку вимоги до радіопередачі даних суттєво підвищуються, зокрема для таких випадків, як інтерактивний пошук файлів або телеконференції Таке підвищення змінює способи використання систем зв'язку і умови, за яких на РЧ проводяться сеанси зв'язку Зокрема, дані мають передаватись з більшими швидкостями і з більшою КІЛЬКІСТЮ можливих максимальних швидкостей Має бути вищою надійність передачі, оскільки помилки при передачі даних менш припустимі, ніж при передачі аудіосигналу Крім того, збільшення КІЛЬКОСТІ типів даних вимагає одночасної передачі кількох типів даних, наприклад, може виникнути необхідність передавати файли даних під час сеансу аудю- або відеозв'язку Збільшення швидкості передачі від АП зменшує КІЛЬКІСТЬ АП 10, що підтримують зв'язок з БС 12 у кожній смузі РЧ, оскільки підвищення швидкість передачі зменшує КІЛЬКІСТЬ АП, здатних 54520 вичерпати ресурси одночасної обробки даних у БС У деяких випадках зворотний канал IS-95 сучасного рівня не відповідає вимогам, породженим цими змінами Отже, винахід спрямовано на підвищення швидкості передачі даних, на більш ефективне використання смуги частот і уможливлення передачі багатьох типів даних у системі ПДКУ Першою задачею винаходу є створення АП або іншого передавача, призначеного для використання у системі радіозв'язку, який має кілька джерел інформаційних даних, кодуючий пристрій для кодування інформаційних даних, кілька джерел службових даних і модулятор для модулювання кодованих інформаційних даних ВІДПОВІДНИМИ модуляційними кодами для передачі на несучій частоті, для комбінування службових даних від різних джерел і передачі комбінованих службових даних Другою задачею винаходу є створення БС або іншого приймача, призначеного для використання у системі радіозв'язку, який має приймач для прийому сигналу на несучій частоті і виділення з нього кодованих інформаційних даних від кількох джерел інформації, модульованих різними ВІДПОВІДНИМИ модуляційними кодами, і комбінованих службових даних від кількох службових джерел, демодулятор для демодулювання кодованих інформаційних даних і службових даних, модульованих різними ВІДПОВІДНИМИ модуляційними кодами, і декодер для декодування кодованих інформаційних даних і демодулювання службових даних Третьою задачею винаходу є створення способу передачі у системі радіозв'язку, який передбачає одержання різних інформаційних даних, кодування інформаційних даних, одержання різних службових даних, модулювання кодованих інформаційних даних різними ВІДПОВІДНИМИ модуляційними кодами для передачі на несучій частоті, комбінування службових даних від різних джерел, і надання кодованих інформаційних даних і комбінованих службових даних для передачі Четвертою задачею винаходу є створення способу генерування модульованих даних для передачі від першого АП групи АП, який передає службові дані і ПІЛОТНІ дані до БС, яка має зв'язок з цією групою АП, який передбачає а) комбінування зазначених службових даних з пілотними даними і б) модулювання зазначених службових даних і пілотних даних згідно з єдиним канальним форматом модуляції Одне з втілень винаходу передбачає створення групи абонентських каналів з індивідуальним регулюванням підсилення шляхом використання групи ортогональних субканальних кодів з невеликою КІЛЬКІСТЮ псевдошумових(далі - ПШ) розширюючих елементів на період ортогональних коливань Дані, призначені для передачі у одному з передавальних каналів з регулюванням коефіцієнта передачі, являють собою НИЗЬКОШВИДКІСНІ дані, кодовані з можливістю виправлення помилок і послідовно повторені перед модуляцією одним з субканальних кодів, і об'єднані з даними, модульованими іншими субканальними кодами Одержані об'єднані дані модулюються з використанням користувацького довгого коду і ПШ розширюючого коду і їх частота підвищується для передачі Використання коротких ортогональних кодів придушує інтерференцію, дозволяючи при цьому ефективне кодування з можливістю виправлення помилок і повторення для рознесення у часі, щоб компенсувати затухання Релея, яке звичайно має місце у наземних системах радіозв'язку У типовому втіленні винаходу групу субканальних кодів утворюють чотири коди Уолша, кожний з яких є ортогональним до решти і має тривалість у чотири елементи У бажаному втіленні винаходу два з користувацьких каналів об'єднано у один інформаційний канал Використання меншої КІЛЬКОСТІ інформаційних каналів є бажаним оскільки знижує відношення максимальної потужності передачі до середньої Винахід припускає використання різних кількостей таких каналів У першому типовому втіленні ПІЛОТНІ дані передаються через перший передавальний канал, а регулювання потужності і передача інших контрольних даних кадрів здійснюються у другому каналі У бажаному втіленні інформацію пілот-каналу і службового користувацького каналу, яка включає дані керування потужністю, об'єднано разом у один інформаційний канал, щоб, підтримуючи безперервність передачі, знизити відношення максимальної потужності передачі до середньої Безперервність передачі важлива тому, що це мінімізує інтерференцію з персональним електронним обладнанням, наприклад, слуховими апаратами і серцевими стимуляторами Оскільки ПІЛОТНІ дані і дані керування потужністю передаються завжди, об'єднаний сигнал буде безперервним Інші канали будуть активними лише під час передачі даних типу, що відповідає каналу Якби дані керування були об'єднані з користувацьким каналом, а не з пілот-каналом, сигнал утвореного інформаційного каналу не був би безперервним під час перерв у первісному інформаційному каналі Інші користувацькі інформаційні канали також можна об'єднати у один передавальний канал Винахід передбачає використання двох окремих користувацьких інформаційних каналів для передачі різних показників коефіцієнта передачі і повторної передачі кадрів різних інформаційних типів Інші два передавальні канали використовуються для передачі неспецифічних цифрових даних, включаючи користувацькі і службові дані У типовому втіленні один з таких каналів пристосовано для двопозиційної фазової модуляцм(ДФМ), а другий - для квадратурної фазової модуляцм(КФМ), що підвищує гнучкість системи У інших втіленнях у обох каналах можна застосувати модуляцію будь-якого з цих типів Перед модуляцією неспецифічні дані кодуються з згорткою з доданням коду КЦН, переупорядковуються, селективно повторюються і піддаються ДФМ- або КФМ-перетворенню Змінюючи КІЛЬКІСТЬ повторювань без обмежень цієї КІЛЬКОСТІ КІЛЬКІСТЮ послідовностей символів, можна одержати велику КІЛЬКІСТЬ різних швидкостей передачі, включаючи вищі Вищих швидкостей передачі можна також досягти одночасною передачею даних у обох неспецифічних каналах Досить частим регулюванням коефіцієнта передачі у кожному з передавальних каналів повне споживання енергії 54520 передавальною системою можна утримувати на мінімальному рівні, мінімізуючи цим взаємні перешкоди і збільшуючи загальну інформаційну здатність системи Особливості, задачі і переваги винаходу детально наведено у подальшому описі з посиланням на креслення, у яких фіг 1 - блок-схема стільникової телефонної системи, фіг 2 - блок-схема АП і БС згідно з типовим втіленням винаходу, фіг 3 - блок-схема кодуючих пристроїв каналів ДФМ і КФМ згідно з типовим втіленням винаходу, фіг 4 - блок-схема передавальної системи обробки сигналу згідно з типовим втіленням винахоДУ, фіг 5 - блок-схема приймальної системи обробки сигналу згідно з типовим втіленням винаходу, фіг 6 - блок-схема системи обробки екземпляру сигналу згідно з типовим втіленням винаходу, фіг 7 - блок-схема декодерів каналів ДФМ і КФМ згідно з типовим втіленням винаходу, фіг 8 - блок-схема передавальної системи згідно з втіленням винаходу, у якій керуючі і ПІЛОТНІ дані об'єднано у один канал, фіг 9 - блок-схема передавальної системи згідно з втіленням винаходу, у якій керуючі і ПІЛОТНІ дані об'єднано у один канал, з фільтруванням сигналів перед передачею, фіг 10 - блок-схема приймальної системи згідно з втіленням винаходу, у якій керуючі і ПІЛОТНІ дані об'єднано у один канал Далі описано нові поліпшені спосіб і апарат для швидкісної передачі у системі радіозв'язку з ПДКУ і їх використання у зворотному каналі стільникової системи, хоча винахід може бути використаний також для прямого каналу Винахід може бути використаний також у інших системах радіозв'язку, включаючи супутникові і двосторонні окремі системи, а також системи, у яких радіосигнали передаються через коаксіальні або ІНШІ широкосмугові кабелі Фіг 2 містить блок-схему приймальної і передавальної систем, а саме, АП 100 і БС 120 згідно з одним з втілень винаходу Перша група даних надходить до канального кодуючого пристрою 103(ДФМ), який генерує потік кодових символів, призначених для ДФМ, і спрямовує його до модулятора 104 Друга група даних надходить до канального кодуючого пристрою 102(КФМ), який генерує потік кодових символів, призначених для КФМ, і спрямовує його також до модулятора 104 Модулятор 104 приймає також дані керування потужністю і ПІЛОТНІ дані, які модулюються разом з даними, кодованими для ДФМ і КФМ, згідно з вимогами ПДКУ, після чого ПОСЛІДОВНІСТЬ модуляційних символів спрямовується до системи 106 обробки РЧ сигналів Система 106 фильтрує ці символи і підвищує їх частоту до рівня несучої для передачі антеною 108 до БС 120 З БС 120 можуть підтримувати зв'язок кілька АП У БС 120 система 122 обробки РЧ сигналів антеною 121 приймає РЧ сигнали і після проходження через смугові фільтри знижує їх частоту і перетворює у цифрову форму Демодулятор 124 приймає ці сигнали, демодулює їх згідно з проце 8 дурою ПДКУ і одержує дані керування потужністю, і ДФМ- та КФМ-дані попередніх рішень Декодер 128 ДФМ декодує ДФМ-дані попереднього рішення, одержані від демодулятора 124, і формує найкращі оцінки ДФМ-даних, а декодер 126 КФМ декодує КФМ-дані попереднього рішення, одержані від демодулятора 124, і формує найкращі оцінки КФМ-даних Найкращі оцінки першої і другої груп даних можуть бути тепер піддані подальшій обробці або передані за подальшим призначенням, а прийняті дані керування потужністю можуть бути використані, безпосередньо або після декодування, для регулювання потужності передачі у прямому каналі, яким дані передаються до АП 100 Фіг 3 МІСТИТЬ блок-схему канального кодуючого пристроя 103 ДФМ і канального кодуючого пристроя 102 КФМ згідно з типовим втіленням винаходу У кодуючому пристрої 103 ДФМ дані надходять до генератора 130 перевірки коду КЦН, який генерує код КЦН для кожного 20-мілісекундного кадру першої групи даних Кадр даних разом з кодом КЦН надходить до генератора 132 хвостових бітів, який додає хвостові біти у вигляді 8 логічних нулів до кінця кожного з кадрів, які визначають певний стан наприкінці процедури декодування Далі кадри надходять до згортаючого кодуючого пристроя 134, який здійснює кодування з згорткою з обмежуючою довжиною(К) 9 і швидкістю(Р) 1/4, створюючи кодові символи з швидкістю, учетверо вищою за вхідну(Ер) У інших втіленнях можна використати іншу швидкість кодування, наприклад, 1/2, але швидкість 1/4 є бажаною, оскільки забезпечує оптимальне співвідношення складності і ефективності Блочний переупорядковувач 136 переупорядковує біти кодових символів, щоб створити часову диверсифікацію для більш надійного проходження сигналу через довкілля з швидким затуханням Переупорядковані символи надходять до повторювача 138, який здійснює NR-разове повторення переупорядкованої ПОСЛІДОВНОСТІ СИМВОЛІВ, достатнє для забезпечення постійної швидкості передачі потоку символів, що відповідає вихідним кадрам з постійною КІЛЬКІСТЮ символів Повторення символів також збільшує диверсифікацію і поліпшує проходження У типовому втіленні постійна КІЛЬКІСТЬ СИМВОЛІВ дорівнює 6144 на кадр, що дає символьну швидкість передачі 307200 символів/с(307,2ксмв/с) Повторювач виконує повторення кожної ПОСЛІДОВНОСТІ символів, починаючи з різних початкових точок Якщо значення NR, необхідне для генерування 6144 символів на кадр, не є цілим, останнє повторення виконується лише для частини ПОСЛІДОВНОСТІ символів Після повторення символи надходять до ДФМ відображувача 139, який генерує потік кодових символів з ДФМ з значеннями +1 і - 1 , призначених для ДФМ У іншому втіленні винаходу повторювач 138 встановлено перед переупорядковувачем 136 і тому переупорядковувач 136 приймає однакову КІЛЬКІСТЬ СИМВОЛІВ у кожному кадрі У кодуючому пристрої 102 КФМ дані надходять до генератора 140 коду КЦН, який генерує код перевірки для кожного 20-мілісекундного кадру Кадр даних разом з кодом КЦН надходить до ге 54520 нератора 142 хвостових бітів, який додає хвостові біти у вигляді 8 логічних нулів до кінця кожного з кадрів Далі кадри надходять до згортаючого кодуючого пристрою 144, який здійснює кодування з згорткою з К = 9 і R = 1/4, створюючи кодові символи з швидкістю, учетверо вищою за вхідну(Ер) Блочний переупорядковувач 146 переупорядковує біти кодових символів, що надходять до повторювача 148, який здійснює NR-разове повторення переупорядкованої ПОСЛІДОВНОСТІ СИМВОЛІВ, доста тнє для забезпечення постійної КІЛЬКОСТІ 12288 символів на кадр, що дає символьну швидкість передачі 614,4ксмв/с Повторювач виконує повторення кожної ПОСЛІДОВНОСТІ символів, починаючи з різних початкових точок Якщо значення NR не є цілим, останнє повторення виконується лише для частини ПОСЛІДОВНОСТІ символів Після повторення символи надходять до КФМ відображувача 149, який генерує фазний потік кодових символів для КМФ з значеннями +1 і -1(КФМ|), і квадратурно фазовий потік(КФМо) кодових символів з значеннями +1 і -1 У іншому втіленні винаходу повторювач 148 встановлено перед переупорядковувачем 146 і тому переупорядковувач 146 приймає однакову КІЛЬКІСТЬ символів у кожному кадрі Фіг 4 містить блок-схему модулятора 104 фіг 2 згідно з типовим втіленням винаходу Кожний з символів, що надходять від канального кодуючого пристрою 103 модулюється кодом Уолша W2 з використанням перемножувача 1506, а символи КФМі і КФМо, що надходять від канального кодуючого пристрою 102 модулюються кодом Уолша Wi з використанням перемножувачів 150в, 150г Дані керування потужністю(КП) модулюються кодом Уолша Wi з використанням перемножувача 150а Регулятор 152 коефіцієнта передачі приймає пілотні дані(ПІЛОТ), у яких, згідно з бажаним втіленням, логічний рівень відповідає позитивній напрузі, і коригує амплітуду згідно з коефіцієнтом Ао регулювання коефіцієнта передачі Сигнали ПІЛОТ не несуть користувацьких даних, але несуть інформацію про фазу і амплітуду для БС, яка завдяки цьому може когерентно демодулювати дані решти субканалів і калібрувати ВИХІДНІ значення попередніх рішень для об'єднання Регулятор 154 коефіцієнта передачі коригує амплітуду коду Wi Уолша для модульованих даних керування потужністю згідно з коефіцієнтом Аі регулювання коефіцієнта передачі, а регулятор 156 коефіцієнта передачі коригує амплітуду коду W2 Уолша для модульованих даних каналу ДФМ згідно з коефіцієнтом Аг регулювання коефіцієнта передачі Регулятори 154а, 1586 коефіцієнта передачі коригують амплітуди фазного і квадратурно - фазового кодів \Л/з Уолша для модульованих з КФМ символів згідно з коефіцієнтом Аз регулювання коефіцієнта передачі У табл 1 наведено коди Уолша згідно з бажаним втіленням винаходу Таблиця 1 Код Уолша Wo W1 W2 w3 Модуляційні символи + +++ + -+ + +-+ -- + 10 Зрозуміло, що код Wo не є модуляційним і відповідає обробці пілотних даних Дані керування потужністю модулюються кодом W-і, дані ДФМ кодом W2 і дані КФМ - кодом W3 Після модуляції ВІДПОВІДНИМИ кодами Уолша зазначені дані передаються згідно з процедурою ДФМ і КФМ ВІДПОВІДно(див нижче) Зрозуміло також, що не обов'язково використовувати кожний з ортогональних каналів і що у іншому втіленні винаходу з лише одним користувацьким каналом можна обмежитись використанням лише трьох з чотирьох кодів Уолша Використання коротких ортогональних кодів дає меншу КІЛЬКІСТЬ елементів на символ і тому дозволяє більш екстенсивні кодування і повторення порівняно з системами, де використовуються довші коди Уолша Більш екстенсивні кодування і повторення забезпечують захист від затухання Релея, яке є головним джерелом помилок у наземних системах зв'язку Винахід припускає використання інших КІЛЬКОСТІ і довжин кодів, однак використання більшого набору довших кодів Уолша погіршує цей захист Використання чотириелементних кодів вважається оптимальним, оскільки чотири канали забезпечують суттєву гнучкість при передачі різних типів даних з мінімальною довжиною коду Суматор 160 складає кориговані амплітуди модуляційних символів, що надходять від регуляторів 152, 154, 156 і 158а, і генерує сумарні модуляційні символи 161 ПШ розширюючі коди ПШі і ПШо розширюються перемноженням з довгим кодом 180 перемножувачами 162а, 1626 Утворений ПШ код від перемножувачів 162а, 1626 використовується для модуляції сумарних модуляційних символів 161 і коригованих квадратурно - фазових символів 163 шляхом комплексного перемноження з використанням перемножувачів 164а - 164г і суматорів 166а, 1666 Утворені фазова складова Хі і квадратурно - фазова складова XQ фільтруються(фільтр не показано) і перетворюються з підвищенням частоти до несучої у системі 106 обробки РЧ, наведеній у спрощеній формі, з використанням перемножувачів 168 і фазних і квадратурно фазних синусоїд Перетворення з підвищенням частоти з зсувом згідно з КМФ також може бути використане Одержані після перетворення фазні і квадратурно - фазні сигнали складаються суматором 170 і підсилюються головним підсилювачем 172 згідно з головним коефіцієнтом Ам передачі, після чого одержаний сигнал s(t) передається до БС 120 У бажаному втіленні для передачі використовується сигнал з шириною смуги 1,2288МГц, що забезпечує сумісність з смугами інших каналів ПДКУ Наявність багатьох ортогональних каналів, через які можна передавати дані, а також використання повторювачів різних швидкостей, що знижує КІЛЬКІСТЬ NR повторювань для високих вхідних швидкостей даних, дають змогу одному АП або іншому передавачу вести передачу з багатьма різними швидкостями Зокрема, зниження КІЛЬКОСТІ NR повторювань, які здійснюються повторювачами 138 або 148(фігЗ) дозволяє підвищити швидкість ER уведення даних до кодуючого пристрою У ін 11 54520 шому втіленні винаходу згортаюче кодування з швидкістю 1/2 виконується при КІЛЬКОСТІ NR повторювань, збільшеній удвічі Типові ШВИДКОСТІ ER 12 кодування, що відповідають різним NR, І ШВИДКОСТІ R кодування і дорівнюють 1/4 та 1/2 для каналів ДФМ і КФМ, наведено у табл 21 та 3, ВІДПОВІДНО Таблиця 2 Канал ДФМ Позначення E R Д ф М біТ/С Швидкість R = 1/4, Повторень NR, Швидкість R= 1/2 Повторень NR, R = 1/4 1 1 1/11 1 1/2 2 3 5 1/3 8 90 6/17 б IT/кадр High Rate-72 76800 6144 High Rate-64 70400 5632 51200 4096 High Rate-32 38400 3072 25600 2048 RS2-Full Rate RSI-Full Rate NULL 14400 1152 9600 768 850 68 б IT/кадр 3072 2816 2048 1536 1024 576 384 34 R= 1/2 2 2 2/11 3 4 6 10 2/3 16 180 12/17 Таблиця З Канал КФМ Позначення E R К ф М біТ/С 153600 High Rate-72 76800 High Rate-64 70400 High Rate-32 38400 RS2-Full Rate RSI-Full Rate NULL 14400 51200 25600 9600 850 Швидкість R = Повторень NR R = Швидкість R = Повторень NR, R = 1/4, біт/кадр 1/4 1/2 біт/кадр 1/2 12288 1 6144 2 6144 2 3072 4 5632 2 2/11 2816 4 4/11 4096 3 2048 6 3072 4 1536 8 2048 6 1024 12 1152 10 2/3 576 21 1/3 768 68 З таблиць 2, 3 можна бачити, що, змінюючи КІЛЬКІСТЬ NR повторювань, можна підтримувати багато різних швидкості передачі даних, включаючи високі, оскільки швидкість ER уведення даних у кодуючий пристрій відповідає швидкості передачі мінус константа, що ураховує передачу коду КЦН, хвостових бітів тощо 3 цих таблиць також можна бачити, що КФМ може бути використана для підвищення швидкості передачі Типові швидкості позначено High Rate-72 та High Rate-32 Швидкості, позначені High Rate-72, High Rate-64 та High Rate-32, дорівнюють, ВІДПОВІДНО, 72, 64 та 32кбіт/с плюс об'єднані службові дані з швидкостями передачі 3,6, 5,2 та 5,2кбіт/с ВІДПОВІДНО у типовому втілення винаходу Швидкості RS1 -Full Rate та RS2Full Rate використовуються у системах стандарту IS-95 і з огляду на сумісність також мають використовуватись у винаході Швидкість NULL відповідає передачі єдиного біту і використовується для передачі біта - показника помилки, що також передбачено стандартом IS-95 Швидкість передачі можна також підвищити одночасною передачею даних у двох або більше ортогональних каналах на додаток або замість зменшення КІЛЬКОСТІ NR повторювань Наприклад, мультиплексором можна розділити одне джерело даних на кілька джерел і вести передачу у кількох субканалах Отже, загальну швидкість передачі можна підвищувати, збільшуючи швидкість передачі у одному каналі, або передаючи одночасно у 16 180 12/17 384 34 32 361 7/17 кількох субканалах, або комбінуючи ці способи, доки не буде перевищена комунікаційна здатність системи і частота помилок не стане неприйнятною, або доки не буде досягнуто максимально можливої потужності передачі Використання кількох каналів також підвищує гнучкість при передачі даних різних типів Наприклад, у каналі ДФМ можна передавати голосову інформацію, а у каналі КФМ - цифрові дані У цьому втіленні можна призначити один канал для даних, що мають передаватись у реальному часі, наприклад, мову, і застосувати низьку швидкість передачі, інший канал може бути призначений для даних, менш чутливих до часу, наприклад, цифрових файлів Для менш чутливих до часу даних переупоряд кування можна виконувати більшими блоками, що збільшить диверсифікацію у часі У іншому втіленні винаходу канал ДФМ можна використовувати для первісної передачі даних, а канал КФМ - для додаткової передачі Використання ортогональних кодів Уолша усуває або суттєво зменшує інтерференцію між каналами, що передаються від АП, а це мінімізує потужність передачі, необхідну для успішного прийому БС Для підвищення обробляючої здатності приймальної системи і, отже, більш повного використання підвищених швидкостей передачі від АП ПІЛОТНІ дані також передаються у ортогональних каналах ПІЛОТНІ дані уможливлюють когерентну обробку тим, що визначають і дозволяють усунути 14 13 54520 фазовий зсув сигналів у зворотному каналі Крім дку БС 120 встановлює різні вимоги до частоти того, ПІЛОТНІ дані можуть бути використані для помилок для цих каналів Якщо фактична частота зважування багатошляхових сигналів, прийнятих з помилок у каналі перевищує припустиму, БС інрізними затримками, після усунення фазових зсуструктує АП знизити коефіцієнт регулювання, доки вів перед їх об'єднанням у приймачі Об'єднання частота помилок не стане рівною припустимій Це сигналів, що надійшли різними шляхами, знижує призводить до збільшення коефіцієнта регулюванвимоги до енергії прийнятого сигналу, необхідної ня у одному з каналів відносно інших, тобто коефідля його успішної обробки, а це у свою чергу зацієнт регулювання у каналі даних, більш чутливих безпечує успішну обробку даних, переданих з піддо помилок, буде більшим, ніж такий коефіцієнт вищеною швидкістю, і знижує інтерференцію між для каналів, менш чутливих до помилок, У інших зворотними каналами Хоча передача пілот - сигвипадках, загальна потужність передачі у зворотналу вимагає додаткових витрат потужності, виконому каналу може потребувати коригування внаристання підвищених швидкостей передачі суттєслідок затухання або переміщення АП У такому во знижує відношення потужності пілот - каналу до випадку БС 120 виконує таке коригування одною загальної потужності зворотного каналу порівняно командою керування потужністю з стільниковими системами, у яких цифрова голоОтже, можливість регулювання коефіцієнта сова інформація передається з невеликою швидкіпередачі у чотирьох ортогональних каналах як стю Отже, у швидкісних системах з ПДКУ відноокремо, так і групами, дозволяє підтримувати зашення Еь/No, яке досягається використанням гальну потужність передачі у зворотному каналі на когерентного зворотного каналу, компенсує додатмінімальному рівні, необхідному для успішної пекові витрати енергії на передачу пілотних даних редачі даних усіх типів - пілотних даних, даних від кожного АП керування потужністю, службових даних і користуНаявність регуляторів 152 - 158 коефіцієнта передачі і підсилювача 172 ще більше підвищує ефективність використання високих швидкостей передачі у системі тим, що дозволяє адаптування передавальної системи до умов у кожному з каналів, до швидкостей передачі і типів даних Зокрема, потужність передачі у каналі, необхідна для успішного прийому, може змінюватись з часом в залежності від умов проходження і незалежно від інших ортогональних каналів Наприклад, на початку прийому у зворотному каналі може виявитись необхідним збільшення потужності у пілот - каналі для детектування і синхронізації у БС Після цього потужність пілот - сигналу може бути суттєво знижена і може змінюватись в залежності від різних факторів, включаючи швидкість руху АП ВІДПОВІДНО, коефіцієнт Ао регулювання коефіцієнта передачі має підвищуватись на початку сеансу зв'язку з подальшим зниженням У іншому варіанті, під час передачі у прямому каналі інформації, малочутливої до помилок, або коли довкілля проходження сигналу не створює затухань, коефіцієнт Аі регулювання коефіцієнта передачі може бути знижений, оскільки з зниженням частоти помилок знижується потреба передавати дані керування потужністю У одному з втілень кожного разу, коли зникає необхідність керувати потужністю, встановлюється А-і = 0 У іншому втіленні винаходу можливість регулювання коефіцієнта передачі у кожному з ортогональних каналів або у всьому зворотному каналі дозволяє БС 120 або ІНШІЙ приймальній системі змінювати коефіцієнта передачі окремого каналу або сигналів усього зворотного каналу, передаючи команди керування потужністю сигналами прямого каналу Зокрема, БС може передавати команди, що визначають потужність передачі у певному каналі або у всьому зворотному каналі У багатьох випадках це дає переваги, зокрема при передачі даних двох типів з різною чутливістю до помилок, наприклад, цифрової голосоваї інформації і цифрових даних у каналах ДФМ і КФМ У такому випа вацьких даних різних типів Більш того, успішна передача може бути забезпечена окремо для кожного типу Передача з мінімально необхідною потужністю дозволяє передати більші об'єми даних до БС, оскільки потужність АП обмежена, а також знижує інтерференцію між АП, що у свою чергу збільшує загальну комунікаційну здатність усієї стільникової системи з ПДКУ Наявність зворотного каналу керування потужністю дозволяє АП передавати до БС дані керування з різними швидкостями, включаючи 800 керуючих біт/с У бажаному втіленні біти керування потужністю інструктують БС підвищити або знизити потужність передачі у прямому інформаційному каналі Хоча взагалі у системах ПДКУ бажано мати швидке керування потужністю, це стає особливо корисним при передачі з підвищеними швидкостями цифрових даних, більш чутливих до помилок, оскільки при таких швидкостях короткочасні затухання призводять до втрати великої КІЛЬКОСТІ інформації За умови, що високій швидкості передачі у зворотному каналі відповідає висока швидкість передачі у прямому каналі, наявність швидкого керування потужністю підвищує швидкість обміну інформацією у системах радіозв'язку з ПДКУ У іншому типовому втіленні винаходу для передачі окремих типів даних використовуються різні швидкості ER уведення даних у кодуючий пристрій, які визначаються значеннями NR Дані можуть передаватись з максимальною швидкістю ER або з кількома нижчими швидкостями ER З коригуванням ВІДПОВІДНИХ NR У бажаному втіленні винаходу максимальні швидкості визначено стандартом IS95(див табл 2, 3 - RS1-Full Rate та RS2-Full Rate), а нижчі швидкості становлять приблизно половину попередньої, тобто утворюється ряд "повна швидкість, 1/2 швидкості, 1/4 швидкості, 1/8 швидкості" Бажано забезпечувати нижчі швидкості збільшенням КІЛЬКОСТІ повторювань NR ДЛЯ наборів 1 та 2 швидкостей у каналі ДФМ(див табл 4) 54520 15 16 Таблиця 4 Набори швидкостей RS1, RS2 Швидкості RS2 - повна RS2-1/2LUB RS2-1/4LUB RS2-1/8LUB RS1 - повна RS1 -1/2 шв RS1 -1/4 шв RS1 -1/8 шв NULL E R . K C J D M б і т / с 1 4 4 0 0 7 2 0 0 3 6 0 0 1 9 0 0 9 6 0 0 4 8 0 0 2 8 0 0 1 6 0 0 8 5 0 Швидкість R = 1/4, біт/кадр 1152 576 288 152 768 384 224 128 68 КІЛЬКОСТІ повторювань для каналу КФМ удвічі перевищують КІЛЬКОСТІ повторювань для каналу ДФМ Згідно З бажаним втіленням винаходу, коли швидкість передачі даних у кадрі змінюється, потужність передачі кадру змінюється згідно з швидкістю передачі Це означає, що, коли швидкість передачі кадру зменшується, потужність передачі у каналі, яким передається цей кадр, знижується пропорційно зниженню швидкості, і навпаки Наприклад, якщо потужність передачі у каналі під час передачі кадру з повною швидкістю становить Т, то потужність передачі наступного кадру половинної швидкості буде Т/2 Бажано, щоб потужність передачі залишалась зниженою протягом усього кадру, але можна також скоротити робочий цикл передачі, "бланкуючу" надлишкову інформацію У будь-якому разі коригування потужності передачі здійснюється у взаємодії з замкненим контуром регулювання, завдяки чому відбувається подальше коригування потужності командами керування від БС Фіг 5 містить блок-схему системи 122 обробки РЧ сигналів і демодулятора 124(фіг2) згідно з типовим втіленням винаходу Перемножувачі 180а, 1806 знижують частоту сигналів, прийнятих антеною 121 і, використовуючи фазну і квадратурно фазну сінусоїди, виробляють фазну і квадратурно - фазну складові R|, RQ ВІДПОВІДНО СЛІД зауважити, що систему 122 наведено у дуже спрощеній формі, і що сигнали також проходять через фільтри і зазнають перетворення у цифрову форму згідно з відомими процедурами Прийняті складові Ri, RQ ПОТІМ надходять до демодуляторів 182 екземплярів сигналу у демодуляторі 124 Кожний з демодуляторів 182 обробляє екземпляр сигналу зворотного каналу, переданий АП і породжений багато шляхов і стю проходження сигналу Хоча показано три таких демодулятора, винахід припускає використання іншої їх КІЛЬКОСТІ, зокрема, лише одного Кожний з демодуляторів 182 виробляє дані попереднього рішення, які включають дані керування потужністю, дані ДФМ, дані КФМі і дані КФМо Кожна група таких даних зазнає часового коригування у демодуляторі 182, хоча таке коригування може бути виконано у об'єднувачі 184, який складає групи даних попереднього рішення, одержані від демодуляторів 182, і формує єдиний ек Повторень NR, Швидкість R= 1/2 Повторень NR, R = 1/2 R = 1/4 б IT/кадр 5 1/3 576 10 2/3 10 2/3 288 21 1/3 21 1/3 144 42 2/3 40 8/19 76 80 16/19 8 384 16 16 182 32 21 ЪП 48 90 6/17 112 54 6/7 64 96 34 180 12/17 земпляр даних керування потужністю, даних ДФМ, даних КФМі і даних КФМо Фіг 6 містить блок-схему демодулятора 182 екземпляру сигналу з фіг 5 згідно з типовим втіленням винаходу Перші прийняті складові R|, RQ коригуються за часом коректором 190 згідно з затримкою на проходження даного сигналу зворотного каналу певним шляхом У перемножувачах 200 довгий код змішується з розширюючими ПШ кодами ПШ|, ПШо і комплексні компоненти ПШ|, ПШо одержаного довгого коду, модульованого ПШ кодами, комплексно перемножуються з коригованими складовими R|, RQ у перемножувачах 202 і суматорах 204 і дають компоненти Х|, XQ Три екземпляри пар Х|, XQ демодулюються з використанням кодів Уолша Wi W2, W3 і демодульовані дані об'єднуються за чотирма демодуляційними елементами у суматорах 212(від 4 до 1) Четвертий екземпляр даних Х|, XQ підсумовується у суматорах 208 і проходить через фільтри 214 У бажаному втіленні пілотний фільтр 214 виконує усереднення ПОСЛІДОВНОСТІ сум, обчислених суматорами 208, решта фільтрів ВІДОМІ фахівцям Фільтровані фазові і квадратурно - фазові пілот - сигнали використовуються для повороту фази і калібрування даних демодульованих згідно з кодами Wi та W2 Уолша Ці дані як дані ДФМ зазнають комплексного перемноження у перемножувачах 216 і суматорах 217 з формуванням у результаті попереднього рішення для даних керування потужністю і даних ДФМ Ці дані керування потужністю складаються за модуляційними символами 384 - 1 у суматорі 222, з формуванням попереднього рішення для даних керування потужністю Кориговані за фазою і модульовані кодом W2 Уолша дані, дані модульвані кодом \Л/з Уолша і дані попереднього рішення для керування потужністю можуть бути об'єднані У іншому втіленні дані керування потужністю також кодуються і декодуються Пілот - сигнали не тільки надають інформацію про фазу, але й можуть бути використані для слідкування у часі Таке слідкування здійснюється додатковою обробкою одного екземпляру прийнятих даних до(попереднього) і обробкою одного екземпляру(пізнього) після обробки поточного екземпляру Для визначення часу, що найближче відповідає часу прийому, амплітуди попереднього і 18 17 54520 пізнього екземплярів порівнюються з амплітудою місцях пілотних даних Об'єднані дані надходять поточного екземпляру для визначення найбільшої до перших входів перемножувачів 310, 328 Якщо амплітуда одного з суміжних з поточним екДо другого входу перемножувача 310 надхоземплярів виявляється вищою за амплітуду потодить ПШ ПОСЛІДОВНІСТЬ значень +1 і -1 ПШ ПОСЛІчного екземпляру, часові дані коригуються для ДОВНІСТЬ, що надходить до перемножувачів 310, одержання найкращого демодульованого сигналу 312, створюється множенням короткої ПШ посліДОВНОСТІ(ПШІ) на довгий код Генерування коротФіг 7 містить блок-схеми декодера 128 каналу ких ПШ і довгокодових послідовностей детально ДФМ і декодера 126 каналу КФМ(фіг2) згідно з описані у IS-95 До другого входу перемножувача типовим втіленням винаходу Дані попереднього 328 надходить ПШ ПОСЛІДОВНІСТЬ значень +1 і -1 рішення каналу ДМФ від об'єднувача 184(фіг5) ПШ ПОСЛІДОВНІСТЬ, що надходить до перемножуванадходять до накопичувача 240, який приймає чів 318, 328, створюється множенням короткої ПШ першу ПОСЛІДОВНІСТЬ 6144/NR демодуляційних сиПОСЛІДОВНОСТІ(ПШО) на довгий код мволів прийнятого кадру(де NR визначається швидкістю передачі даних попереднього рішення каВИХІДНІ дані перемножувача 310 надходять до налу ДФМ, як описано вище) і додає кожну першого входу перемножувача 314, а ВИХІДНІ дані подальшу ПОСЛІДОВНІСТЬ 6144/NR демодуляційних перемножувача 318 - до елемента 320 затримки, символів прийнятого кадру до вже накопичених який затримує ВХІДНІ дані на тривалість половини Блочний зворотний переупорядковувач 242 відноелемента коду Після елемента 320 затриманий влює упорядкованість даних, одержаних від сумасигнал надходить до віднімаючого входу віднімаютора 240, а декодер 244 Вітербі декодує ці дані і чого пристроя 314, від якого сигнали надходять до формує дані остаточного рішення і коди КЦН Дані полосових фільтрів і елементів регулювання коепопереднього рішення для КФМі і КФМо від об'єдфіцієнта передачі пілот - сигналів(не показаних) нувача 184(фіг5) об'єднуються демультиплексоВИХІДНІ дані перемножувача 328 надходять до ром 246 у декодері 126, який генерує єдиний потік елемента 330 затримки, який затримує ВХІДНІ дані даних попереднього рішення Цей потік надходить на тривалість половини елемента коду Після до накопичувача 248, який акумулює кожний з елемента 330 затриманий сигнал надходить до 6144/NR демодуляційних символів(де NR визначадругого складаючого входу суматора 322 Перший ється швидкістю передачі даних КФМ) Блочний вхід суматора 322 з'єднано з виходом перемножузворотний пере-упорядковувач 250 відновлює вача 312, від якого сигнали надходять до полосоупорядкованість даних, одержаних від суматора вих фільтрів і елементів регулювання коефіцієнта 248, а декодер 252 Вітербі декодує ці дані і форпередачі пілот - сигналів(не показаних) мує дані остаточного рішення і коди КЦН У іншому Інформаційні дані, призначені для передачі у типовому втіленні(фіг 3), у якому повторення симдодатковому каналі, у вигляді ПОСЛІДОВНОСТІ знаволів виконується до пере-упорядковування, накочень +1 та -1 надходять до першого входу перепичувачі 240, 248 встановлено після блочних звомножувача 302, до другого входу якого подається ротних переупорядковувачів 242, 250 У втіленні з з повторюванням ПОСЛІДОВНІСТЬ(+1, -1) Уолша, використанням наборів швидкостей передачі швипризначена знижувати інтерференцію між каналадкість передачі у кадрі невідома і тому використоми даних, що передаються від АП ПОСЛІДОВНІСТЬ вуються кілька декодерів, кожний з яких призначедобутків від перемножувача 302 надходить до но для окремої швидкості, і на підставі даних КЦН елемента 304 визначення коефіцієнта передачі, здійснюється вибір швидкості, що найбільш вірогіякий калібрує амплітуду до значень, визначених дно відповідає швидкості передачі кадру Винахід коефіцієнтом передачі каналу пілот - сигналів і припускає використання і інших способів виявленкеруючих даних Після елемента 304 сигнали надня помилок ходять до першого входу суматора 316, ВИХІДНІ дані якого надходять до входів перемножувачів Фіг 8 ілюструє передавальну систему зворот312, 318 Далі обробка продовжується, як описано ного каналу, у якій керуючі і ПІЛОТНІ дані об'єднано вище у один канал Слід зауважити, що винахід у тій же мірі може бути використаний для прямого каналу, Інформаційні дані, призначені для передачі у але його використання у віддалених мобільних основному каналі, у вигляді ПОСЛІДОВНОСТІ значень станціях дає додаткові переваги Зрозуміло, що +1 та -1 надходять до першого входу перемножукеруючі дані можуть бути об'єднані у ІНШІ канали, вача 306, а до його другого входу подається з пощо передаються АП Однак, у бажаному втіленні вторюванням ПОСЛІДОВНІСТЬ(+1, -1) Уолша, признакеруючі дані уведено у ,пілот - канал, оскільки на чена знижувати інтерференцію між каналами відміну від інших каналів він завжди активний неданих, що передаються від АП ПОСЛІДОВНІСТЬ дозалежно від наявності інформації, яку АП має пебутків від перемножувача 306 надходить до елередати до БС Крім того, керуючі дані не обов'язмента 308 визначення коефіцієнта передачі, який ково об'єднувати з пілот - каналом, вони можуть калібрує амплітуду до значень, визначених коефібути вбудовані у нього цієнтом передачі каналу пілот - сигналів і керуючих даних Після елемента 304 сигнали надходять ПІЛОТНІ дані, що складаються з потоку бінардо другого входу суматора 316, ВИХІДНІ дані якого них " 1 " , надходять до мультиплексора(МУЛЬТ) надходять до входів перемножувачів 312, 318 300 До мультиплексора 300 також надходять дані Далі обробка продовжується, як описано вище каналу керування, які у типовому втіленні являють собою керуючі дані, що мають значення +1 та -1 і Фіг 9 ілюструє необхідні операції фільтрування інструктують БС підвищити або знизити потужність і додаткові переваги, які приносить об'єднання передачі Мультиплексор 300 об'єднує ці два потопілот - сигналів і керуючих даних, тобто зменшенки даних, розміщуючи керуючі дані у зумовлених ня КІЛЬКОСТІ необхідних фільтрів Пілот - сигнали і 19 54520 керуючі дані об'єднуються у перемножувачі 350(фіг 8) Об'єднані дані у вигляді значень +1 та 1 надходять до перших входів перемножувачів 352, 354 До другого входу перемножувача 352 надходить добуток короткого ПШ коду ПШ| і довгого коду, утворений у перемножувачі 390 Від перемножувача 352 добуток надходить до фільтра 356 з скінченною імпульсною характеристикою(СІХ) До другого входу перемножувача 354 надходить добуток короткого ПШ коду ПШо і довгого коду, утворений у перемножувачі 392 Вихідний сигнал від фільтра 356 надходить до складаючого входу віднімаючого пристрою 374, вихід якого, призначений для передачі, надходить до підвищуючих перетворювачів частоти і елементів підсилення пілот - сигналу(не показаних) Від перемножувача 354 добуток надходить до фільтра 358 СІХ Варто зауважити, що об'єднання пілотних і керуючих даних дозволило зменшити КІЛЬКІСТЬ фільтрів на 2, оскільки кожний з каналів потребує два фільтри з скінченною імпульсною характеристикою Це спрощує схему, знижує споживання енергії і економить місце 3 виходу фільтру 358 сигнал надходить до елемента 360 затримки, який затримує ВХІДНІ дані на тривалість половини елемента коду Після елемента 360 затриманий сигнал надходить до першого складаючого входу суматора 376, вихідний сигнал якого надходить до підвищуючих перетворювачів частоти і елементів підсилення пілот - сигналу(не показаних) Інформаційні дані додаткового каналу у вигляді ПОСЛІДОВНОСТІ значень +1 та -1 надходять до першого входу перемножувача 362, до другого входу якого подається з повторюванням послідовність(+1, -1) Уолша, призначена знижувати інтерференцію між каналами даних ПОСЛІДОВНІСТЬ добутків від перемножувача 362 надходить до перших входів перемножувачів 364, 366 До другого входу перемножувача 364 надходить ПШ ПОСЛІДОВНІСТЬ ВІД перемножувача 364, а до другого входу перемножувача 392 - ПШ ПОСЛІДОВНІСТЬ ВІД перемножувача 390 Дані від перемножувача 364 надходять до елемента 368 СІХ/підсилення, який фільтрує сигнал і підсилює його згідно з коефіцієнтом передачі об'єднаного каналу пілотних і керуючих даних З виходу елемента 368 сигнал надходить до елемента 372 затримки, який затримує ВХІДНІ дані на тривалість половини елемента коду Після елемента 372 сигнал надходить до першого віднімаючого входу віднімаючого пристрою 374 Далі обробка виконується, як описано вище Від перемножувача 366 дані надходять до елемента 370 СІХ/підсилення, який фільтрує сигнал і підсилює його згідно з коефіцієнтом передачі об'єднаного каналу пілотних і керуючих даних З виходу елемента 370 сигнал надходить другого входу суматора 376 Далі обробка виконується, як описано вище Інформаційні дані головного каналу у вигляді ПОСЛІДОВНОСТІ значень +1 та -1 .надходять до першого входу перемножувача 388, до другого входу якого подається з повторюванням послідовність(+1, +1, -1, -1) Уолша, призначена знижувати інтерференцію між каналами даних ПОСЛІДОВНІСТЬ 20 добутків від перемножувача 388 надходить до перших входів перемножувачів 378, 384 До другого входу перемножувача 378 надходить ПШ ПОСЛІДОВНІСТЬ ВІД перемножувача 392, а до другого входу перемножувача 384 - ПШ ПОСЛІДОВНІСТЬ ВІД перемножувача 390 Дані від перемножувача 378 надходять до елемента 380 СІХ/підсилення, який фільтрує сигнал і підсилює його згідно з коефіцієнтом передачі об'єднаного каналу пілотних і керуючих даних З виходу елемента 380 сигнал надходить до елемента 382 затримки, який затримує ВХІДНІ дані на тривалість половини елемента коду Після елемента 372 сигнал надходить до другого віднімаючого входу віднімаючого пристрою 374 Далі обробка виконується, як описано вище Від перемножувача 384 дані надходять до елемента 386 СІХ/підсилення, який фільтрує сигнал і підсилює його згідно з коефіцієнтом передачі об'єднаного каналу пілотних і керуючих даних З виходу елемента 386 сигнал надходить третього входу суматора 376 Далі обробка виконується, як описано вище Фіг 10 ілюструє приймач, що обробляє об'єднані ПІЛОТНІ і керуючі сигнали Прийняті антеною сигнали перетворюються з зниженням частоти, фільтруються і розділяються на екземпляри Фільтровані дані екземплярів надходять до елементів 400, 402 затримки, які затримують дані на тривалість половини елемента коду Після цього сигнали надходять до перших входів перемножувачів 404, 406 До других входів перемножувачів 404, 406 надходить ПШ ПОСЛІДОВНІСТЬ ВІД перемножувача 450, який генерує цю ПОСЛІДОВНІСТЬ, перемножуючи короткий код ПШ| і довгий код, як описано раніше Фільтровані дані екземплярів надходять також безпосередньо(без затримки) до перших входів перемножувачів 446, 448 До других входів перемножувачів 446, 448 надходить ПШ ПОСЛІДОВНІСТЬ ВІД перемножувача 452, який генерує цю ПОСЛІДОВНІСТЬ, перемножуючи короткий код ПШо і довгий код Дані з виходу перемножувача 404 надходять до першого входу суматора 408, а дані з виходу перемножувача 446 - до другого входу суматора 408 Дані з виходу перемножувача 406 надходять до складаючого входу віднімаючого пристрою 410, а дані з виходу перемножувача 448 - до віднімаючого входу цього пристрою З виходу суматора 408 дані надходять до елемента 412 затримки і селектора 434 пілотних символів Селектор 434 відфільтровує керуючі дані від пілотних і надсилає пілот - сигнал до фільтру 436 пілот - сигналів Фільтр 436 фільтрує сигнал і надсилає його до перемножувачів 416, 418 Подібно до цього, селектор 438 відфільтровує керуючі дані від пілотних і надсилає пілот - сигнал до фільтру 440 пілот - сигналів Фільтр 440 фільтрує сигнал і надсилає його до перемножувачів 442, 444 Елемент 412 створює затримку, щоб синхронізувати дані, що надійшли двома шляхами, перед тим, як надіслати їх до перемножувача 416 Ця затримка дорівнює затримкам, яких сигнал зазнав при обробці селектором 434 і фільтром 436, тобто таким же затримкам, яких сигнал зазнав при обро 22 21 54520 бці селектором 438 і фільтром 440 Подібним чиа дані з виходу перемножувача 444 - до віднімаюном елемент 414 затримки синхронізує дані перед чого входу цього пристрою 3 виходу пристрою 422 тим як надіслати їх до перемножувачів 418, 442 дані надходять до першого входу перемножувача, 426, а до другого входу перемножувача 426 подаВід елемента 412 затримки дані надходять до ється з повторюванням ПОСЛІДОВНІСТЬ(+1, -1) Уолперших входів перемножувачів 416, 444 До другоша Добуток від перемножувача 426 надходить до го входу перемножувача 416 надходять сигнали суматора 428, який підсумовує ВХІДНІ біти за перівід фільтра 436, до другого входу перемножувача од ПОСЛІДОВНОСТІ Уолша і генерує цим дані додат444 надходять сигнали від фільтра 440 Від елекового каналу 3 виходу пристрою 422 дані надхомента 414 затримки дані надходять до перших дять до першого входу перемножувача 430, а до входів перемножувачів 418, 442 До другого входу другого входу перемножувача 430 подається з перемножувача 418 надходять сигнали від фільтповторюванням ПОСЛІДОВНІСТЬ(+1, +1, - 1 , -1) Уолра 436, до другого входу перемножувача 442 - сигша Добуток від перемножувача 430 надходить до нали від фільтра 440 суматора 432, який підсумовує ВХІДНІ біти за періДані з виходу перемножувача 416 надходять од ПОСЛІДОВНОСТІ Уолша і генерує цим дані голодо першого входу суматора 420, а дані з виходу вного каналу перемножувача 442 - до другого входу суматора 420 Сума з суматора 420 надходить до селектора Наведений опис багатоканальної швидкісної 424 керуючих символів, який відокремлює ПІЛОТНІ системи радіозв'язку з ПДКУ дає змогу фахівцю дані і надсилає їх до керуючого процесора(не повикористати винахід, вдаючись, якщо необхідно, казаного), який згідно з цими даними коригує подо модифікацій у межах основних концепцій винатужність передачі БС ходу Наведені у описі втілення лише ілюструють винахід, не обмежуючи його Дані з виходу перемножувача 418 надходять до складаючого входу віднімаючого пристрою 422, ФІГ.1 Y 1 ДЕ0НЕКГС6 ИЙ ПРИСТРОЇ VEI * ї в Д Н Н Я П О Т У Я ^ ДАНІ Д А М ОДНІ КФМ —„ * - | К О Д У З Д Н І < Я V ИДНШІІ Е ф М юте—» •1 ~— » ^ К О Д У В Д Н Н !* У КАНАПІ Д Ф М ?*-* Z •ц 1 0 4 СИСТЕМА 2 ^16 •0 ^ Фіг.2 Фіг.З 23 54520 Фіг.4 Фіг.5 ФІГ.6 Фіг.7 24 25 54520 26 Фіг.8 Фіг.9 Фіг.10 Підписано до друку 03 04 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюSet of subscriber channels and a method for transmitting messages in a communication system
Назва патенту російськоюКомплект абонентской аппаратуры и способ передачи сообщений в системе связи
МПК / Мітки
МПК: H04Q 7/00
Мітки: абонентській, станція, спосіб, радіозв'язку, пристрій, базова, системі, передачі
Код посилання
<a href="https://ua.patents.su/13-54520-abonentskijj-pristrijj-bazova-stanciya-i-sposib-peredachi-u-sistemi-radiozvyazku.html" target="_blank" rel="follow" title="База патентів України">Абонентський пристрій, базова станція і спосіб передачі у системі радіозв’язку</a>
Абонентський пристрій в супутниковій системі зв’язку
Номер патенту: 26750
Опубліковано: 12.11.1999
Автор: Дербороу Айзек Ньютон
МПК: H04B 7/155, G01S 5/14, H04B 7/185
Мітки: пристрій, зв'язку, супутниковій, абонентській, системі
Формула / Реферат:
1. Абонентское устройство в спутниковой системе связи для приема и передачи цифровых данных и для самостоятельного определения местоположения абонентского устройства, включающее средство для приема со спутника и передачи на спутник спутниковой системы связи цифровых данных пользователя, причем средство для приема и передачи включает приемо-передающее средство, связанное со множеством спутников спутниковой системы связи для передачи на...
Спосіб і пристрій для формування даних для різних швидкостей передачі даних в системі зв’язку
Номер патенту: 46751
Опубліковано: 17.06.2002
Автори: Тідеманн Едвард Дж. молодший, Вітлі Чарльз Е. ІІІ, Зехаві Ефраїм, Оденволдер Джозеф П., Падовані Роберто
МПК: H04J 3/16
Мітки: передачі, пристрій, системі, зв'язку, швидкостей, даних, формування, спосіб, різних
Формула / Реферат:
1. Спосіб передачі першого кадру даних з швидкістю з першої зумовленої сукупності швидкостей, що належить до сукупності сукупностей швидкостей передачі даних у системі зв'язку, який відрізняється тим, що передбачає операції приймання зазначеного кадру даних, генерування групи бітів контролю парності та кінцевих бітів відповідно до зазначеної сукупності швидкостей для зазначеного першого кадру даних, кодування розширеного кадру даних,...
Система цифрової передачі, передавальний пристрій та приймальний пристрій для використання у цій системі передачі та носій запису
Номер патенту: 52573
Опубліковано: 15.01.2003
Автор: Локофф Герардус Корнеліс Петрус
МПК: G11B 20/10, H04J 3/16, H04B 1/66, H04N 7/08, H04L 7/00
Мітки: передавальний, запису, використання, система, системі, носій, цифрової, приймальний, передачі, цій, пристрій
Текст:
...декодер для восстановления упомянутого широкополосного цифрового сигнала Передающее устройство содержит средство 3 с фильтрами анализа, формирующее из упомянутого широкополосного цифрового сигнала SBB множество (М) субполосных сигналов SSBI-SSBM, которое разделяет полосу широкополосного сигнала SBB С уменьшением частоты дискретизации на последовательные субполосы, номер m которых (1 < m s M) возрастает с увеличением частоты Все эти...
Приймальний блок і базова станція системи зв’язку та спосіб регулювання амплітуди сигналу, що приймається довільно в приймальному блоці
Номер патенту: 41867
Опубліковано: 15.10.2001
Автор: Райорден Кеннет Б.
Мітки: приймається, амплітуди, сигналу, блок, довільно, системі, регулювання, приймальному, станція, базова, блоці, спосіб, приймальний, зв'язку
Формула / Реферат:
1. Приемный блок в системе связи коллективного доступа с временным разделением каналов (Time Division Multiple-Access - TDMA), позволяющий регулировать амплитуду произвольно принимаемого сигнала, поступающего на вход приемного блока в ходе одного временного интервала TDMA, отличающийся тем, что приемный блок содержит постоянное запоминающее устройство (ПЗУ) и запоминающее устройство с произвольной выборкой (ЗУПВ) для запоминания контрольных...
Спосіб формування, передачі та приймання додаткової інформації у системі телезв’язку pal
Номер патенту: 47610
Опубліковано: 15.07.2002
Автор: Яцун Андрій Михайлович
МПК: H04N 15/00
Мітки: спосіб, інформації, приймання, додаткової, телезв'язку, передачі, формування, системі
Формула / Реферат:
Спосіб формування, передачі та приймання додаткової інформації у системі телезв'язку PAL, який заснований на тому, що у спектрі піднесучої сигналу яскравості одного з зображень стереоскопічної пари одночасно формуються та передаються основні червоний і синій хроматичні сигнали цього ж зображення стереоскопічної пари та додаткові зелений і червоний сигнали кольору іншого зображення стереоскопічної пари, який відрізняється тим, що у...
Попередній патент: Антена з оптимальною діаграмою спрямованості
Наступний патент: Гідравлічний генератор коливань
Випадковий патент: Кабель силовий судновий для вибухонебезпечних середовищ